|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
Modele matematice neliniare ale masinii asincrone utilizate ca generator in centralele electrice eoliene
Introducere
Energia eoliana este una dintre energiile regenerabile a carei utilizare este in plina dezvoltare. Tehnologiile actuale de conversie a energiei eoliene in energie electrica permit obtinerea energiei electrice la costuri competitive cu costurile altor procedee de conversie.
Generatoarele asincrone sunt utilizate din ce in ce mai mult ca generatoare electrice in centralele eoliene, datorita avantajelor pe care le prezinta in raport cu generatoarele sincrone: fiabilitate sporita, cost redus si intretinere simpla. Generatoarele asincrone sunt folosite atat in paralel cu retelele existente, caz in care reteaua le asigura energia reactiva necesara magnetizarii lor, cat si pe retele proprii, caz in care energia reactiva de magnetizare a lor este asigurata de baterii de condensatoare.
Schema de principiu a unei centrale electrice eoliene este prezentata in figura 1. Intre turbina eoliana si generatorul electric este dispus un multiplicator de turatie. La o anumita viteza a vantului, generatorul electric furnireaza o putere maxima la o turatie numita turatie optima. Cu cat viteza vantului este mai mare cu atat si aceasta turatie optima este mai mare, asa cum se arata in figura 2.
|
|
|
|
Figura 1 |
Figura 2 |
Deoarece viteza vantului nu este constanta, este necesar ca generatorul asincron sa fie introdus intr-un circuit de comanda automata care sa ii asigure functionarea in permanenta la turatiile optime, iar el sa poata furniza puterea maxima posibila. Pentru realizarea unor asemenea circuite de comanda automata este necesara cunoasterea cu mare acuratete a modelului matematic al generatorului asincron, model care trebuie sa tina seama de variatiile parametrilor masinii in timul functionarii. Aceste variatii sunt datorate fenomenului de saturatie magnetica longitudinala si transversala (cross-saturation) si incalzirilor circuitelor electrice si magnetice.
Analiza modelelor
In literatura se
intalnesc mai multe tipuri de modele matematice folosite pentru simularea
regimurilor de functionare si pentru comanda automata a
masinii asincrone. Astfel sunt folosite modele lineare in diverse sisteme
de referinta (d,q,0), ![]() si (a, b,c), cat
si modele nelineare care tin seama de anumite tipuri de
nelinearitati 2,3,3,4, [12],[13], [14].
si (a, b,c), cat
si modele nelineare care tin seama de anumite tipuri de
nelinearitati 2,3,3,4, [12],[13], [14].
In lucrarea prezenta s-a efectuat o analiza comparativa riguroasa a modelelor matematice nelineare ale masinii asincrone din punctual de vedere al utilizarii lor in schemele de comanda automata, in deosebi in schemele cu comanda numerica, care folosesc algoritmi de comanda inteligenti, cum sunt: algoritmii fuzzy, algoritmi neuronali, algoritmi genetici sau sisteme expert.
Modelul nelinear ales pentru studiu este modelul prezentat de J. E. Brown, K. P. Kovacs and P. Vas in lucrarea [2]:
 unde:
unde:
![]() →inductanta proprie rotorica in cazul linear;
→inductanta proprie rotorica in cazul linear;
![]() → inductanta de scapari rotorica;
→ inductanta de scapari rotorica;
![]() → inductanta proprie statorica in cazul
linear;
→ inductanta proprie statorica in cazul
linear;
![]() → inductanta de scapari statorica;
→ inductanta de scapari statorica;
![]() → inductanta proprie statorica pe axa d in sistemul de referinta
stationar;
→ inductanta proprie statorica pe axa d in sistemul de referinta
stationar;
![]() → inductanta proprie statorica pe axa q in sistemul de referinta
stationar;
→ inductanta proprie statorica pe axa q in sistemul de referinta
stationar;
![]() → inductanta proprie rotorica pe axa d in sistemul de referinta
stationar;
→ inductanta proprie rotorica pe axa d in sistemul de referinta
stationar;
![]() → inductanta proprie rotorica pe axa q in sistemul de referinta
stationar;
→ inductanta proprie rotorica pe axa q in sistemul de referinta
stationar;
 → inductanta dinamica
→ inductanta dinamica
![]() →inductanta statica;
→inductanta statica;
![]() → factor care tine cont de fenomenul de
saturatie ortogonala (daca
→ factor care tine cont de fenomenul de
saturatie ortogonala (daca![]()
![]()
![]() )
)
![]() in care
in care ![]() ;
; ![]()
Dupa cum este aratat in [1] cand saturatia este luata in considerare in ecuatiile tensiunii apare un termen suplimentar:
Acest termen in conditiile liniare este egal cu zero, deoarece![]() . Asadar,
. Asadar, ![]() si
si ![]() tine cont de
faptul ca
tine cont de
faptul ca ![]() este variabil in timp.
este variabil in timp.
Simularea modelului nelinear al masinii asincrone
4.1 Parametrii motorului studiat sunt:
Putere nominala 3 kW; flux nominal 1,1 Wb;1
pereche poli, 2850rot/min, current nominal 10,4 A, rezistenta statorica 1,68![]() , rezistenta rotorica 2,09
, rezistenta rotorica 2,09![]() , inductanta statorica
, inductanta statorica ![]() H; inductanta rotorica
H; inductanta rotorica ![]() H; inductanta mutuala 0,42 H, inertia 0,117kg.m2, coeficientul
de frecari cu aerul
H; inductanta mutuala 0,42 H, inertia 0,117kg.m2, coeficientul
de frecari cu aerul ![]() Nms-1, curba de saturare.
Nms-1, curba de saturare.
4.2 Simularea modeluilui masinii asincrone
Pentru
simularea modelului neliniar s-a dat curba de saturare ![]() prin puncte. Utilizand aceasta curba si
tinand seama de definitiile inductantei statice si dinamice
s-a realizat o bucla in care se calculeaza la fiecare pas de integrarea
valorile inductantelor. Pentru pasul initial s-a considerat L=Lm.
prin puncte. Utilizand aceasta curba si
tinand seama de definitiile inductantei statice si dinamice
s-a realizat o bucla in care se calculeaza la fiecare pas de integrarea
valorile inductantelor. Pentru pasul initial s-a considerat L=Lm.
In programul de simulare, realizat in Matlab/Simulink, s-au facut diferite aproximari ale curbei de magnetizare: prin mai multe segmente, considerand curba de saturare formata din doua segmente (portiunea lineara si cea saturata), polinomiala de gradul 2, 3, 4, 5, exponentiala, sinusoidala si combinatii ale acestora si s-a realizat o functie care pe baza punctelor date genereaza curba de saturare.
Pentru a verificarea modelului saturat al masinii asincrone s-a inlocuit curba de saturare cu o dreapta astfel incat L=Lm. Rezultatele au fost comparate cu cele obtinute in cazul modelelor lineare scrise in sistemul de coordonate ( , 0), respectiv sistemul de coordonate (d, q, 0).
Rezultatele obtinute sunt prezentate in figura 3 urmatoare:
Figura 3 Variatia curentiilor staorici in timp
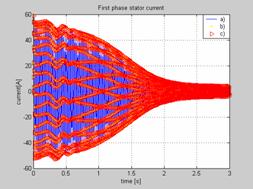
unde : a) modelul linear scris in sistemul de coordonate ( , 0); b) modelul linear scris in sistemul de coordonate (d, q, 0); c) modelul nelinear linearizat.
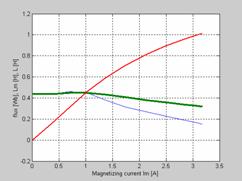
Al doilea pas s-a urmarit varitia fluxului, a inductantelor statica si dinamica in raport cu curentul de magnetizare, variatie care a fost comparata cu rezultatele obtinute in lucrarea [1].
|
Figura 4 varitia fluxului, a inductantelor statica si dinamica in raport cu curentul de magnetizare |
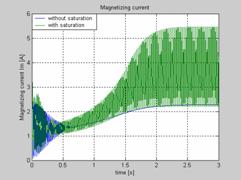
Figura 5 Variatia in timp a curentului de magnetizare |
|
|
|
La pasul urmator s-a introdus curba de magnetizare si s-au comparat rezultatele obtinute cu cele din cazul linear si s-au obtinut figurile 5, 6,7:
|
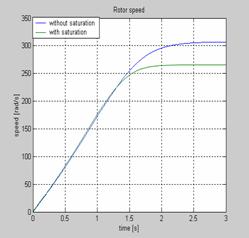
Figura 6 Variatia in timp a vitezei rotorice: |
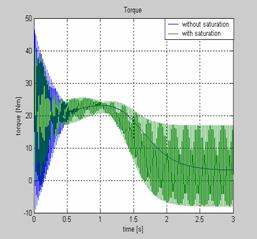
Figura 7 Variatia in timp a cuplului: |
|
|
|
In tabelul 2 sunt prezentate rezultatele obtinute la aproximarea curbei de saturatie prin 8 segmente, cu ajutorul functiei exponentiale data de E. Levi, [9] si folosind S-function/Matlab, o functie care pe baza punctelor date genereaza curba de saturare.
Analiza rezultatelor:
Din figurile se observa curentii nu sunt defazati cu ±120, dar sistemul de
curenti este echilibrat (![]() ).
).
Din figurile 10-19 se observa ca aproximarea caracteristii de saturare folosita de Levi nu este convenabila pentru modelul nostru. Analiza rezultatelor se va face pe baza rezultatelor obtinute la simularea modelului, caracteristica de saturare fiind aproximata cu 8 trepte si cu S-Function.
Rezultate asemanatoare cu cele obtinute la simularea modelului folosind aproximarea curbei de saturatie prin 2 drepte (una pentru partea lineara si una pentru partea de saturatie), cu 4 trepte, 6 trepte le-am obtinut si la simularea modelului unde curba de magnetizare a fost aproximata 8 trepte.
Din figura 11 observam ca, curentul de magnetizare incepe sa se stabilizeze la t=1,65 s, iar in figura 13 curentul se stabilizeaza la t=2s functia care pe baza punctelor date genereaza curba de saturare(fig. 10, 13, 16, 19).
Din figurile 17 si 19 se observa influenta aproximarii caracteristii de saturatie asupra variatie inductivitatii statice si a inductivitatii dinamice. Folosirea switch-urilor la aproximarea caracteristicii prin trepte, la simulare, este vizibila la alura inductivitatii dinamice, de aceea este indicat sa se foloseasca o functie penru aproximarea caracteristicii.
Concluzii:
Aproximarea curbei de saturatie are influenta asupra caracteristicilor motorului. De aceea la simularea generatorului asincron pentru centrale electrice eoliene, unde acuratetea modelarii motorului este foarte importanta este de preferat folosirea intregului ciclu de histerezis.
|
Tabelul 2 |
||
|
Carcteristica de saturatie aproximata prin 8 segmente |
Aproximarea carcteristicii de saturatie folosita de Levi [9] |
Carcteristica de saturatie aproximata cu ajutorul S-function |
|
Figura 8 |
Figura 9 |
Figura 10 |
|
Figura 11 |
Figura 12 |
Figura 13 |
|
Figura 14 |
Figura 15 |
Figura 16 |
|
Figura 17 |
Figura 18 |
Figura 19 |
[1] Peter Vas, "Sensorless vector and direct torque control", Oxford University Press, 1998
[2] J. E. Brown, K. P. Kovacs and P. Vas, "A method of including the effects of main flux path saturation in the generalized equations of a.c. machines", IEEE Transactions on Power Apparatus and Systems, Vol. Pas-102, No. 1, January 1983.
[3] A. Charette, J. Xu, A. Lakhsasi, Z. Yao and V. Rajagopalan, "Modeling and validation of Asynchronous machine taking into account the saturation effects", IEEE 0-7803-3544-9, 1996.
[4] Hangwen Pan, Jinshen Jiang and Joachim Holtz, "Decoupling control and parameter identification of field-oriented induction motor with saturation", IEEE 0-7803-3104-4, 1996
[5] A. Campeanu, "Transient performance of the saturated induction machine", Electrical Engineering 78, 1995.
[6] J. O. Ojo, Alifio Consoli and Thomas A. Lipo, "An Improved model of saturated induction machines", IEEE Transaction on industry applications, vol. 26, No. 2, March/April 1990.
[7] P. T. Lagonotte, H. AL Miah, M. Poloujadoff, "Modeling and identification of parameters of saturated induction machine operating under motor and generator conditions", Electrical Machines and Power System, 1999.
[8] Tang Ningping, Wu Hanguang and Qiu Peiji, "A saturation model of induction machine by space vector".
[9] E. Levi, "Impact of cross-saturation on accuracy of saturated induction machines models", IEEE Transaction on Energy Conversion, vol. 12, No. 3, September 1997.
[9] P. Vas, M. Alakula, "Field-oriented control of saturated induction machines", IEEE Transaction on Energy Conversion, vol. 5, No. 1, March 1990.
Y.W. Liao, E. Levi "Modelling and simulation of a stand-alone induction generator with rotor flux oriented control" Electric Power Systems Research 46 (1998) 141-152
[11] Dan Levy, "Stand alone induction generator" Electric Power Systems Research 41 (1997) 191-201
[12] Jaward Faiz, A.R. Seif , "Dynamic analysis of induction motors with saturable inductances", Electric Power Systems Research 34 (1995) 205-210
[13] R.Wamkeue, I. Kamwa " Generalized modeling and unbalanced fault simulation of saturated self induction generators" Electric Power Systems Research 61 (2002) 11-21
[14] Emmanuel Schaeffer, "Diagnostic des machines asynchrones: modeles et outils parametriques dedies a la simulation et a la detection de defuts", teza de doctorat., Ecole doctorale sciences pour l'ingenieur de Nantes, 6 decembrie 1999.
Copyright © 2025 - Toate drepturile rezervate