|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
VARIANTE DE STRUCTURA CINEMATICA SI ORGANOLOGOCA ALE LANTURILOR CINEMATICE SI DISPOZITIVELOR DE APUCARE
Robotii de tip PORTAL pot fi clasificati in :
roboti si manipulatoare di tip portal simplu ;
roboti si manipulatoare de tip portal dublu.
Robotii de tip portal simplu pot fi :
monoculisa - cu un singur brat pe axa Z
multiculisa - cu doua sau mai multe brate pe axa Z dispuse pe unul sau mai multe carucioare.
Caracteristicile robotilor de tip poratl simplu monoculisa este faptul ca sistemul de orientare are in general una sau mai rar doua grade de libertate. Dispozitivele de apucare sunt in majoritatea cazurilor in numar de doua.
Elementul de baza al structurii mecanice il reprezinta portalul care este compus in general dintr-o grinda sustinuta pe dois au mai multi montanti functie de lungimea grinzii.
Caruciorul este elementul de interfata intre portal si brat ( culisa ) si mai are rolul de a sustine elementele de actionare pe axale X si Z si foloseste in general galeti pentru ghidarea pe portal si ghidarea bratului.
Datorita acestor cerinte , structura caruciorului trebuie sa fie rigida si in consecinta destul de grea. In scopul imbunatatirii performantelor dinamice se utilizeaza in constructia caruciorului aliaje din aluminiu turnat.
Bratul (culisa ) este la majoritatea robotilor portal de tip cheson si cu actionare prin intermediul mecanismului pinion-cremaliera, dar sunt destul de raspandite brate din elemente de translatie liniara cu actionare hidraulica . Avantajul utilizarii mecanismului pinion-cremaliera este acela ca ofera posibilitatea realizarii unor viteze de deplasare mari si curse foarte lungi.
Pe brat se afla in general mecanismele care asigura mobilitatile locale ale dispozitivelor de apucare. Aceste mecanisme ( articulatii) sunt plasate la capatul inferior al bratului si sunt actionate fie hidrauli sau pneumatic , fie electric.
Vom prezenta cateva variante de structura cinematica si organologica ce corespund unor roboti de tip 'portal simplu'.
1. MANIPULATOR ELECTRIC PORTAL
Este destinat deservirii cu piese a unuia sau mai multor posturi de lucru situate in linie, in vederea prelucrarii mecanice sau asamblarii prin sudura, cu alte piese.
Manipulatorul electric portal are in alcatuire un modul de translatie pe orizontala a unui carucior care sustine un al-II-lea modul de translatie pe verticala a unui brat dotat cu un dispozitiv de prehensiune.
In figura 2.4. este prezentata vederea (partiala) in perspectiva a manipulatorului electric portal. Elementele componente din figura sunt :
M1. motor
M2. motor
B. carucior
C. dispozitiv compensator
S1. surub cu bile
S2. surub
E. dispozitiv de prehensiune
D. modul
21. coloana
23. flansa
24. electromagnet
In figura 2.5. este prezentata schema cinematica a modulului de translatie.
Elementele componente sunt :
lonjeroane 20. cuplaj
A. grinda 21. coloana
M1.motor de actionare 22. bucsa cu bile
M2.motor de actionare 23. flansa
S1. surub cu bile 24. electromagnet
P2. piulita conjugata lui S1 25. plunjer
cuplaj 26. bucsa elastica
18. placa
19. reductor cilindric
Manipulatorul portal este alcatuit dintr-o grinda de rezistenta A, cu sectiune triunghiulara, alcatuita din trei lonjeroane patrate, rigidizate intre ele, suprafetele laterale ale lonjeroanelor constituindu-se in ghidaje plane, pentru rulmentii montati in placile 2, 3, 4, 5 care, asamblate rigid, se constituie intr-un carucior B. Ghidarea precisa a caruciorului B se obtine minimalizand jocurile din lagarele support ale rulmentilor.
Deplasarea caruciorului B, de-a lungul grinzii A, se face transmitand miscarea de rotatie a unui motor M1, prin intermediul unui cuplaj 6 la surubul S1 care o transforma in miscare de translatie, printr-o piuluta P1, cu bile recirculate, blocata cu doua pene paralele 7 si cu un capac filetat 8, intr-un support 9, prevazut cu doua tije de ghidare 10, montate paralel si asigurate cu doua stifturi.
Prin proiectarea acestui manipulator se urmareste :
- simplificarea constructiva
- sporirea rigiditatii manipulatorului
- eliminarea jocurilor si vibratiilor
- imbunatatirea preciziei de pozitionare a manipulatorului.
ROBOT PROGRAMABIL
In figura 2.6. este prezentat un robot de manipulare programabil, tip portal, destinat in principal servirii masinilor-unelte, in productia de serie. Robotul poate manipula piese de rotatie (tip bucsa si arbore) cum asa pana la 80 kg. Precizia de pozitionare a obiectelor este de ±1 mm. Marimea unui lot este de 10 pana la 600 bucati.
Robotul este mobil, cu constructie modulara tip portal, dotat cu un brat, rezistent fata de vibratii si cu o protectie ridicata impotriva defectiunilor electrice. Robotul lucreaza in spatiul cartezian (plan). Cinematica robotului este asigurata de doua miscari de translatie ale bratului si o miscare de rotatie a mainii. Varianta standard este dotata cu un dispozitiv de apucare mecanic, tip cleste. Miscarea caruciorului pe portal, avand o cursa de 3 230 mm, are viteza maxima de 800 mm/s. Ridicarea bratului se face pe un domeniu de 1 00 mm cu o viteza mazima de 400 mm/s. Rotirea mainii fata de axa bratului are o cursa de 180°, cu viteza maxima de 180°/s.
Toate axele robotului, inclusiv dispozitivul de apucare, au actionare hidraulica. Conducerea robotului se realizeaza cu un sistem specializat de constructie monobloc, realizat din elemente pneumatice de joasa presiune.
Pentru programare si control nu sunt necesare dotari speciale.
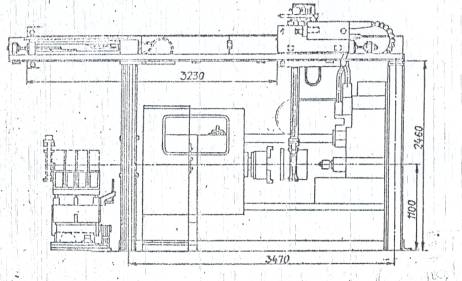
Fig. 2.6
3.DISPOZITIV DE APUCARE PENTRU ROBOTI INDUSTRIALI
Dispozitivul de apucare pentru roboti industriali este destinat realizarii operatiilor de alimentare cu semifabricate a unor masini-unelte precum si a operatiilor de montaj automat care necesita o precizie ridicata de pozitionare.
La aplicatiile actuale, in cadrul unei celule robotizate, schimbarea automata a dispozitivelor de apucare sau a celor de lucru de catre un robot se face prin intermediul unui modul de cuplare mecanica, energetica si informationala prevazut cu dispozitive de actionare a mecanismelor de cuplare, fapt care mareste lungimea bratului de parghie al fortei rezistente si conduce la constructii mai complexe, cu greutati si, implicit, puteri consumate mai mari. Cu scopul obtinerii unor dimensiuni si greutati ale modulului de cuplare cat mai reduse, exista solutii de sisteme de cuplare automata a mainilor mecanice si a dispozitivelor de lucru la bratul unui robot, precum si a diverselor tipuri de "degete" la structura unei maini mecanice. In acest fel se elimina dispozitivul de actionare a mecanismului de zavorare / dezavorare, iar constructia mainii mecanice si a modulului de cuplare, dimensiunile, greutatea si, implicit, puterea consumata de catre robot, se reduc substantial. In figurile de mai jos se prezinta diverse modele de maini mecanice care se pot cupla automat la bratul unui robot.


a.
4.DISPOZITIV DE PRINDERE CU BACURI INTERSCHIMBABILE AUTOMAT
Dispozitivul de prindere cu bacuri interschimbabile automat este destinat robotilor din celulele flexibile de fabricatie, in care se impune manipularea unor semifabricate sau piese ale caror forme si dimensiuni variaza intr-un ndomeniu larg.
Figura 2.8. reprezinta o vedere frontala, cu sectiuni partiale ale dispozitivului de prindere, echipat cu portbacuri interschimbabile.
Elementele din figura sunt :
1-parghii articulate
2-tija
3-element de executie liniar
4-brate de fixare
5-portbacuri interschimbabile
6-bolturi
7-articulatii
8-placi laterale
9-stift de ghidare
10-stift de indexare
a, b, c, d-suprafete de ghidare
f, g-orificii in care patrund stifturile 9, 10.
Dispozitivul este prevazut cu niste brate de fixare 4, antrenate in miscare de rotatie de un element de executie 3. In vederea montarii unor portbacuri 5 interschimbabile, in bratele de fixare 4 este presat cate un stift de ghidare 9 si perpendicular pe acesta, culiseaza un stift de indexare 10, stifturi care patrund in niste orificii f, g practicate in portbacuri 5.
Un mecanism cu bare articulate asigura, prin miscarile relative ale bratului robotului, cuplare si decuplare automata a portbacurilor 5 interschimbabile.
Figura 2.9. reprezinta o vedere laterala, din directia sagetii I, din figura 2.6.
Figura 2.10. reprezinta o vedere in plan orizontal a dispozitivului de depunere A a portbacurilor scimbabile.
Figura 2.11. reprezinta o vedere in directia sagetii II a dispozitivului di figura 2.8.
Figura 2.12. reprezinta o vedere, la scara marita, a detaliului III din figura 2.9, in pozitie extrema inferioara.
Figura 2.13 reprezinta o vedere, la scara marita, a detaliului III din figura 2.9, in pozitie extrema superioara.
Elementele din figurile prezentate sunt urmatoarele:
11-arcuri
12-placa de baza
13-tampoane opritoare
14-tampon fix
15-placa de zavorare
16-support mobil
17, 18-brate articulate
19-arc
20-bila
f, g-orificii
h-canal
l-suprafata inclinata
k-cep
m-suprafata a elementului kobil16
i, j-lacase practicate in 16
Cuplarea si decuplarea portbacurilor 5 cu bratele de fixare 4 se realizeaza cu ajutorul unui mechanism cu bare articulate A. Acest mechanism A este alcatuit din tampoanele opritoare 13 reglabile si un tampon fix 14, ce asigura pozitionarea corecta a portbacurilor 5 care, in pozitia de asteptare, sunt fixate cu placile de zavorare 15 solidare cu cate un support mobil 16 ce se deplaseaza intr-o miscare plan-paralela prin intermediul unor brate articulate 17 si 18, in doua pozitii extreme asigurate de un arc 19 si o bila 20 care patrund succesiv in locasurile I si j practicate in suportul 16, solidar cu placa de zavorare 15 care este prevazut cu un cep cilindric k, si cu o suprafata inclinata l ce conlucreaza cu stiftul de indexare 10 a portbacurilor 5.
Problem ape care o rezolva acest dispozitiv este:
-realizarea unui dispozitiv de prindere cu bacuri interschimbabile automat, care sa asigure schimbarea rapida si sigura a portbacurilor, fara interventia operatorului uman.
Copyright © 2025 - Toate drepturile rezervate