|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
Dinamica proceselor
Starea dinamica a unui proces este determinata de acumularile de masa si de energie din interiorul acestuia, datorate dezechilibrului dintre fluxurile de masa si de energie care intra si ies din acesta.
Studiul dinamicii proceselor prezinta o importanta aparte pentru conducerea automata a acestora. Atat la proiectarea cat si la operarea sistemelor automate nu se poate face abstractie de comportarea dinamica a elementelor componente si a sistemului in ansamblul sau. S-a remarcat inca din capitolul 1 ca modificarea valorilor perturbatiilor determina aparitia unor stari dinamice ale procesului, respectiv a unor abateri de la starea de referinta, a caror eliminare se face in timp, prin comenzi cu efecte care depind, de asemenea, de intarzierile specifice procesului respectiv. Nici un SRA nu poate exista si functiona in afara fenomenelor specifice dinamicii.
Exprimarea cantitativa a fenomenelor dinamice se efectueaza cu ajutorul modelelor matematice, cunoscuta sub numele de identificare, are la baza prelucrarea corespunzatoare a valorilor variabilelor de intrare si de iesire din proces, datele necesare fiind culese fie din operarea curenta a procesului, fie in urma modificarii dupa anumite strategii a variabilelor de intrare. Determinarea analitica a modelelor matematice are la baza legile care guverneaza desfasurarea proceselor respective: bilanturi materiale si energetice, ecuatii de stare, relatii de echilibru etc. In practica inginereasca de construire a modelelor matematice se utilizeaza curent ambele cai, care imbinate in mod corespunzator, conduc la rezultate performante.
In activitatea de stabilire a unui model matematic analitic, o importanta deosebita trebuie acordata ipotezelor care se fac asupra sistemului fizic ce trebuie modelat. Un model matematic care tine seama de fenomen la nivel de detalii microscopice va fi atat de complicat incat solutionarea lui ar cere un timp foarte lung sau ar fi practic imposibila. Un compromis intre o descriere cat mai exacta si obtinerea unui raspuns util este intotdeauna de acceptat. Ipotezele care au stat la baza construirii unui anumit model matematic trebuie insa bine retinute si avute in vedere la utilizarea ulterioara a modelului.
Atat procesele P cat si dispozitivele de automatizare DA sunt elemente de reglare ER, in care se stabilesc anumite dependente intre variabilele de iesire e si cele de intrare i. Dupa caracterul acestor dependente date de relatiile (1.10) si (1.11), elementele de reglare se clasifica in:
e1emente proportionale, P;
elemente integrale, I;
elemente derivative, D;
Tipuri de elemente de reglare
1. Elemente proportionale
Dupa cum arata si denumirea, elementele proportionale se caracterizeaza prin existenta, in regim stationar a unei dependente liniare intre variabila de intrare si variabila de iesire. Intr-o acceptiune mai larga, denumirea de element proportional se aplica tuturor elementelor de reglare care in regim stationar prezinta o dependenta univoca intre variabila de intrare si variabila de iesire, chiar daca aceasta dependenta nu este liniara. Acest lucru este justificat prin faptul ca in teoria sistemelor automate liniare, caracteristica statica a elementelor este liniarizata, intrucat se admit numai variatii mici pentru variabilele de intrare si variabilele de iesire.
1.1 Elementul proportional de ordinul zero
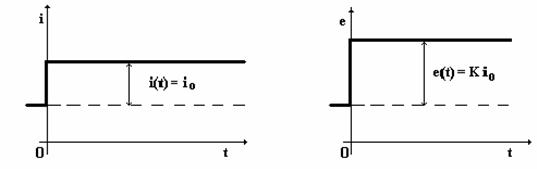
Ecuatia generala a elementelor proportionale, care exprima comportarea statica a acestora, este de forma: e=K .i
In cazul elementelor proportionale lipsite de efecte de intarziere, aceasta relatie poate fi scrisa si in forma: e(t)=K . i(t)
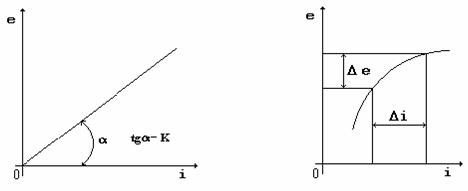
Functiile i(t) si e(t) exprima variatii in timp ale variabilei de intrare, respectiv ale variabilei de iesire. Factorul de proportionalitate K constituie panta caracteristicii statice (figura l) avand denumirea de coeficient de transfer.
In
cazul elementelor cu caracteristica statica neliniara (figura),
coeficientul de transfer nu este constant, ci depinde de i. In acest
caz, coeficientul de transfer se exprima prin relatia: ![]() unde Di si De reprezinta
diferenta intre doua va1ori stationare apropiate ale variabilei
de intrare, respectiv ale variabilei de iesire. Diferentele Di si De se aleg suficient de
mici pentru ca in limitele lor, caracteristica statica sa fie practic
liniara.
unde Di si De reprezinta
diferenta intre doua va1ori stationare apropiate ale variabilei
de intrare, respectiv ale variabilei de iesire. Diferentele Di si De se aleg suficient de
mici pentru ca in limitele lor, caracteristica statica sa fie practic
liniara.
Daca se aplica ecuatiei (1) transformarea Laplace, se obtine: E(s)=K . I(s)
respectiv functia de transfer a elementului proportional de ordinul zero: Y(s)=K
Rezulta ca functia de transfer a elementului proportional de ordinul zero este o constanta, egala cu coeficientul de transfer.
Elementele proportionale de ordinul zero sunt o idealizare, fiindca orice sistem real este afectat de o anumita intarziere a variatiei variabilei de iesire in raport cu variatia variabilei de intrare. Aceasta intarziere se datoreaza timpului necesar pentru modificarea continutului de substanta sau energie a elementului de reglare, modificare de care este legata variatia variabilei de iesire.
Raspunsul la semnal treapta: in cazul unei variatii in salt a variabilei de intrare raspunsul variabilei de iesire apare sub forma unei modificari in salt a acesteia.
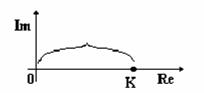
Raspunsul la frecventa al elementului proportional de ordinul zero are forma: Y(jw)=K
Reprezentarea acestuia in planul complex, consta intr-un punct aflat la distanta K de origine, pe axa reala pozitiva :
1. Elementul proportional de ordinul I
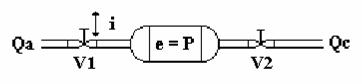
Ca exemplu de element proportional de ordinul I se va lua in consideratie un vas cu scurgere libera redat schematic in figura.
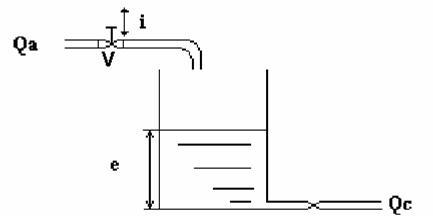
Se considera ca variabila de intrare a acestui element este deschiderea robinetului V de pe conducta de alimentare, iar variabila de iesire, nivelul lichidului din vas.
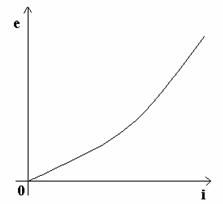
Comportarea statica se studiaza tinand cont de faptul ca vasul este in regim stationar, e si i fiind constante in timp, daca debitul de consum Qc este egal cudebitul de alimentare Qa. iar relatia de dependenta este de forma: e = B . i2 (2)
Care reprezinta ecuatia caracteristicii statice a vasului cu scurgere libera
In
baza relatiei (2), coeficientul de transfer K se obtine derivand
expresia in raport cu i: ![]()
Datorita neliniaritatii caracteristicii statice, coeficientul de transfer nu este constant, depinzand direct proportional de valoarea variabilei de intrare.
Comportarea dinamica a vasului cu scurgere libera se studiaza, presupunand ca la nu moment dat, variabila de intrare incepe sa se modifice in timp dupa o functie i(t).
Rezistenta de evacuare R a lichidului prin tubul de evacuare se exprima prin raportul dintre variatia variabilei de iesire si variatia corespunzatoare a debitului de evacuare.
Coeficientul de proportionalitate, dintre viteza de variatie a variabilei de iesire si diferenta celor doua debite, avand dimensiunea unui volum raportat la o lungime (daca debitele se exprima in unitati volumice), poarta numele de coeficient de capacitate si se noteaza cu C. In cazul vasului cu scurgere libera, coeficientul de capacitate C este tocmai suprafata cilindrica a vasului, exprimandu-se prin volumul de lichid care modifica nivelul din recipient cu o unitate. Generalizand definitia data coeficientului de capacitate a recipientului hidraulic, pentru toate tipurile de elemente de acumulare, prin coeficient de capacitate C se intelege raportul dintre variatia continutului de substanta ΔM sau energie ΔW si variatia corespunzatoare a variabilei de iesire Δe:
![]() sau
sau ![]()
Ecuatia comportarii dinamice a vasului cu scurgere libera este:
CR e'(t) + e(t) = k·R·i(t)
Produsul C·R are dimensiunea timpului, se noteaza cu T si poarta denumirea de constanta de timp a elementului de acumulare. Produsul k·R reprezinta coeficientul de transfer K, al elementului studiat si ca atare obtinem:
Te'(t) + e(t)=Ki(t) (3)
Rezulta ca in cazul unui element proportional cu o capacitate, adica in cazul unui element de acumulare proportional, comportarea dinamica se exprima printr-o ecuatie diferentiala liniara, de ordinul I, cu coeficienti constanti. Din aceasta cauza, tipul de element de reglare studiat poarta denumirea de element proportional de ordinul I.
Functia de transfer a elementului proportional de ordinul I, se obtine aplicand relatiei (3) transformata Laplace.
T·s·E(s) + E(s) = K· I(s)
Din
aceasta ecuatie se poate explicita raportul E(s)/I(s) care
exprima functia de transfer Y(s): 
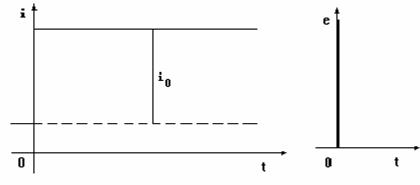
Ecuatia raspunsului la semnal treapta a elementului proportional de ordinul intai se obtine integrand relatia (3) pentru cazul cand functia i(t) reprezinta semnalul treapta, adica cand functia i(t) este o constanta i0:
T·e'(t) + e(t)=K·i0
Solutia ecuatiei adica functia e(t) care exprima variatia variabilei de iesire provocata de o variatie in salt a variabilei de intrare este:
e(t) = K · i0(1 - ε -t/T)
Raspunsul la semnal treapta al elementului proportional de ordinul I consta dintr-o variatie exponentiala a variabilei de iesire, comportare care este redata grafic in figura.
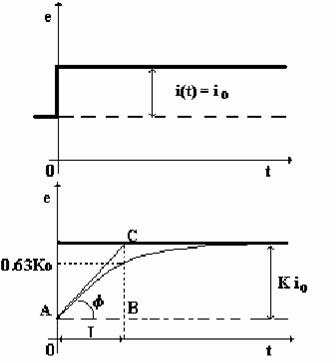
Variabila de iesire tinde asimptotic spre noua valoare stationara, regimul tranzitor fiind teoretic infinit de lung.
Raspunsul la frecventa a1 elementului proportiona1 de ordinul I se obtine considerand in relatia (3) ca i(t) si e(t) devin functii periodice.
i(t) = i0 · ε jωt e(t) = e0 · ε j(ωt + α)
i0, e0 - amplitudinile variabilei de intrare, respectiv iesire;
α - defazajul variabilei de iesire fata de variabila de intrare;
ω - pulsatia oscilatiilor.
si introducand valorile pentru i(t), e(t) si e'(t) in relatia (3), aceasta devine:
T · jωe0 · ε j(ωt + α) + e0 · ε j(ωt + α) = K · i0 · ε jωt
Dupa
calculele necesare se obtine: 
Raspunsul
la frecventa se noteaza cu Y(jω):  Relatia
arata ca raspunsul la frecventa este o marime
complexa, avand modulul egal cu raportul amplitudinilor si argumentul
dat de defazajul α a1 oscilatiilor variabilei de iesire
fata de oscilatiile variabilei de intrare. Ca atare,
raspunsul la frecventa se reprezinta grafic in plan complex
printr-un vector cu lungimea e0/i0 rotit fata
de axa rea1a cu unghiul α.
Relatia
arata ca raspunsul la frecventa este o marime
complexa, avand modulul egal cu raportul amplitudinilor si argumentul
dat de defazajul α a1 oscilatiilor variabilei de iesire
fata de oscilatiile variabilei de intrare. Ca atare,
raspunsul la frecventa se reprezinta grafic in plan complex
printr-un vector cu lungimea e0/i0 rotit fata
de axa rea1a cu unghiul α.
Efectuand calculele rezulta expresiile care redau dependenta modulului si a argumentului de pulsatia oscilatiilor:

![]()
Relatiile arata ca raportul amplitudinilor scade cu cresterea pulsatiei, ca defazajul este negativ si creste in valoare absoluta odata cu pulsatia. Deci, in planul complex, vectorul e0/i0, scade in lungime si se roteste spre axa imaginara negativa odata cu cresterea pulsatiei
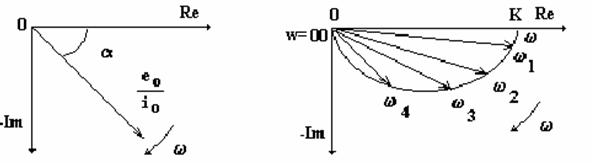
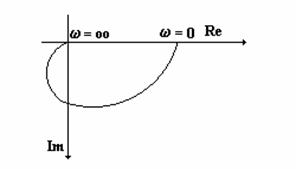
Locul de transfer a1 elementului proportional de ordinul I, este locul geometric a1 varfurilor vectorilor care reprezinta in planul complex raspunsul la frecventa, pentru va1ori ale pulsatiei cuprinse intre zero si infinit.
Daca se dau valori intermediare pulsatiei ω si se calculeaza valorile modulului si al argumentului α se constata ca locul de transfer este un semicerc
Punctul initia1 corespunzator pulsatiei ω = 0, se afla pe axa reala pozitiva (α = 0), la o distanta de origine egala cu coeficientul de transfer K. La pulsatie infinita, modulul devine 0, ceea ce arata ca punctul fina1 al locului de transfer este originea. Totodata din valoarea limita a defazajului (-90°), rezulta ca locul de transfer are in origine un punct de tangenta cu axa imaginara.
Un alt exemplu de element proportional de ordinul I este un rezervor cu gaz sub presiune
Variabila de intrare este gradul de deschidere al robinetului de pe conducta de alimentare a rezervorului, iar variabila de iesire, presiunea P din incinta acestuia.
Elementul de reglare obtinut prin legarea in serie a unei rezistente pneumatice R, cu o capacitate pneumatica C, este de asemenea un element proportiona1de ordinul I
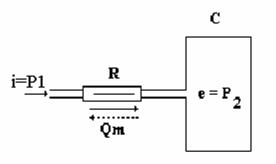
Drept variabila de intrare, se considera, presiunea P1, iar variabila de iesire este presiunea P Aceasta grupare, practic poarta denumirea de element RC pneumatic si este frecvent intalnita in constructia regulatoarelor pneumatice.
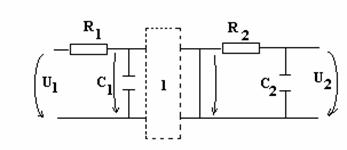
Quadripolul electric alcatuit dintr-o rezistenta si un condensator electric, este de asemenea un element proportiona1 de ordinul I
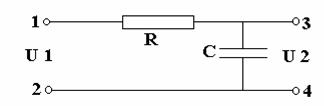
Variabila de intrare a acestuia este tensiunea u1 aplicata bornelor 1 si 2, iar variabila de iesire, tensiunea u2, culeasa la bornele 3, 4. Quadripolul proportiona1 se utilizeaza frecvent la constructia regulatoarelor electronice.
Termometrul termorezistiv, alcatuit dintr-un suport ceramic, pe care este infasurat un fir metalic, a carui rezistenta electrica creste cu cresterea temperaturii mediului ambiant, este de asemenea un element proportiona1 de ordinul I
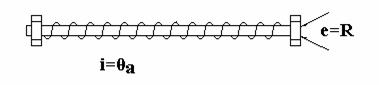
Variabila de intrare este temperatura mediului in care se afla termorezistenta, iar variabila de iesire este rezistenta electrica a firului.
Acest termometru este utilizat in cadrul dispozitivelor de automatizare a temperaturii, in calitate de element de masurare.
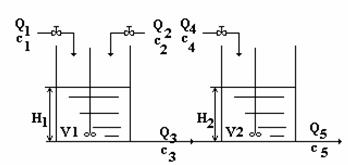
Un element de reglare proportiona1 de ordinul I, foarte des intalnit in tehnologia chimica, este vasul de amestecare, utilizat la amestecarea a doua solutii cu concentratii diferite c1 si c2, in scopul obtinerii unei solutii omogene de concentratie c3
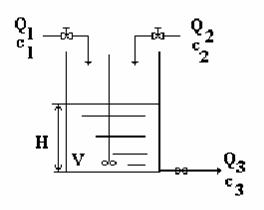
Drept marime de intrare se poate considera unul dintre cele doua debite Q1 sau Q2, iar variabila de iesire, concentratia c3.
1.3. Elementul proportional de ordinul II
Elementul proportional de ordinul II este alcatuit din doua elemente proportionale de ordinul I legate in serie. Ca exemplu, se va considera sistemul alcatuit din doua recipiente cu scurgere libera, montate in cascada
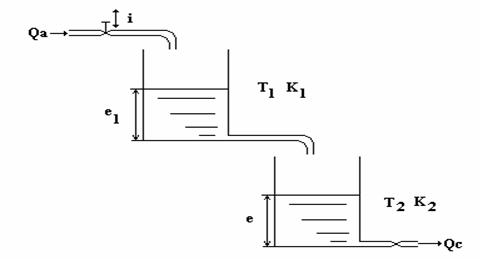
Variabila de intrare este gradul de deschidere a robinetului V de pe conducta de alimentare, iar variabila de iesire este nivelul din cel de-a1 doilea recipient. Elementele fiind legate in serie, variabila de iesire a primului element de ordinul I (nivelul e1) constituie variabila de intrare pentru cel de-al doilea element.
Ecuatia comportarii statice se determina din relatiile bilantului de materiale. Caracteristica statica este neliniara, la fel ca in cazul elementelor proportionale de ordinul I.
Ecuatia comportarii dinamice a elementului proportional de ordinul II se obtine cu ajutorul ecuatiilor diferentia1e de ordinul I ce descriu comportarea in timp a celor doua elemente proportionale de ordinul I, legate in serie:
![]()
![]()
Dupa operatiile matematice intermediare se obtine in fina1:
T1T2e'(t) + (T1 + T2)e'(t) + e(t) = K1· K2 · i(t)
Se constata ca la un sistem cu doua elemente proportionale de ordinul I legate in serie, comportarea dinamica este descrisa de o ecuatie diferentiala liniara neomogena de ordinul 2 cu coeficienti constanti. Un asemenea sistem este denumit element proportional de ordinul II.
Functia de transfer Y(s), obtinuta prin aplicarea operatiei de transformare Laplace si are forma:
Transfomata Laplace a ecuatiei raspunsului la semnal treapta in cazul in care i(t) = i0 este de forma:
Aplicand teorema dezvoltarii, se obtine functia e(t) care exprima variatia variabilei de iesire, provocata de un semnal treapta i0:

In cazul particular cand cele doua elemente proportionale au constante de timp egale (T1 = T2 = T), expresia raspunsului la semnal treapta este de forma:
![]()
Curba de variatie a variabilei de iesire porneste tangent la dreapta primului regim stationar si prezinta un punct de inflexiune C. Punctu1 de tangenta la momentul t = 0 arata ca viteza de variatie a variabilei de iesire este nula la inceputul regimului tranzitor si ca atare elementul proportional de ordinul II este caracterizat prin urmatoarele conditii initiale: e(0) = 0 si e'(0) = 0
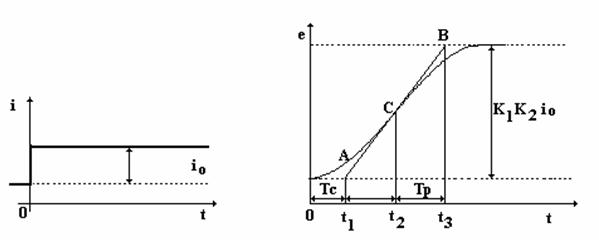
Figura 21
Tangenta dusa prin punctul de inflexiune C intersecteaza dreapta primului regim stationar in punctul A, iar dreapta celui de al doilea regim stationar in B. Abscisele punctelor A, B si C notate cu t1, t2 si t3 sunt folosite frecvent in practica reglarii automate pentru caracterizarea elementelor proportionale de ordinul II. Astfel, de la inceputul regimului tranzitor (t = 0) si pana in momentul t = t1, variatia variabilei de iesire are loc cu viteza mica si este neansemnata in raport cu variatia totala K1K2i0. Variatia lenta de la inceputul regimului tranzitor se datoreaza prezentei in sistem a doua elemente de acumulare legate in serie si de aceea intervalul de la t = 0 pana la t = t1 este denumit intarziere capacitiva si se noteaza Tc. Intervalul de la t1 pana la t2 este denumit timp de pornire (Tp). Aceasta marime poate fi definita ca timpul necesar variabilei de iesire pentru atingerea noii valori stationare, daca variatia acesteia s-ar efectua cu viteza constanta si anume cu viteza maxima din momentul t3. Ca atare, timpul de pornire este o marime analoaga cu constanta de timp T a elementelor proportionale de ordinul I.
Raspunsul la frecventa al elementului proportional de ordinul II are expresia:
Relatiile pentru dependenta modulului si a defazajului de pulsatia ω:
![]()
La un sistem de elemente legate in serie, modulul este egal cu produsul modulelor elementelor componente, iar defazajul rezulta din suma defazajelor produse de fiecare element.
Valorile modulului si ale defazajului pentru ω = 0 si ω = α, sunt urmatoarele: pentru ω = 0: e0/i0 = K1K2 si α = 0
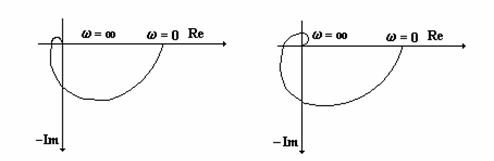
Se constata ca locul de transfer porneste de pe axa reala pozitiva la o distanta de origine egala cu K1K2 si se termina in origine avand acolo un punct de tangenta cu axa reala, defazajul limita fiind - 180°. Ca atare, locul de transfer parcurge doua cadrane.
Exemple:
-doua rezervoare sub presiune legate in serie

-doua vase de amestecare legate in serie: la obtinerea unei solutii cu concentratia C5, prin amestecarea a trei solutii, cu concentratiile C1, C2 si C4
|
-Circuitul electric prezentat
1- amplificator de separare |
-Schimbatorul de caldura
|
Elemente proportionale de ordin superior
Sistemele formate din mai mult decat doua elemente proportionale de ordinul I legate in serie, sunt denumite elemente proportionale de ordin superior. Comportarea dinamica a acestor elemente este descrisa totdeauna de o ecuatie diferentiala liniara neomogena cu coeficienti constanti, avand ordinul egal cu numarul de elemente legate in serie.
Functia de transfer a unui asemenea element se obtine din produsul functiilor de transfer ale elementelor componente.
Y(s)n = Y1(s) · Y2(s) · ... · Yn(s)
Raspunsul la semnal treapta este exprimat printr-o relatie care cuprinde termeni exponentiali intr-un numar egal cu ordinul sistemului, iar curba de variatie a variabilei de iesire porneste tangent la dreapta primului regim stationar si prezinta de asemenea, un punct de inflexiune
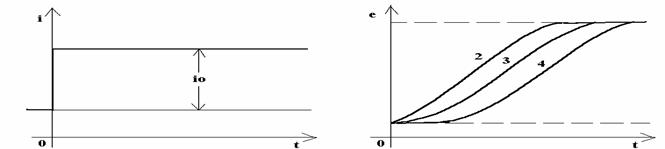
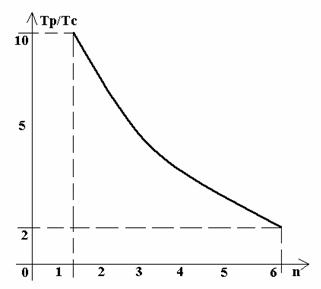
Din aceasta cauza, raportul dintre timpul de pornire si intarzierea capacitiva scade cu cresterea ordinului, fapt redat in figura pentru cazul particular cand elementele componente au constante de timp egale.
Constatarile privind raspunsul la frecventa al elementului proportional de ordinul II, pot fi de asemenea generalizate pentru elementele de ordin superior. Modulul raspunsului la frecventa rezulta din produsul modulelor elementelor componente, iar defazajul este suma defazajelor individuale.
Locul de transfer al elementelor proportionale de ordin superior incepe intotdeauna pe axa reala pozitiva si se termina in origine, tangent la una din axe, parcurgand un numar de cadrane egal cu ordinul sistemului
Elementul integral
Elementele integrale poarta
aceasta denumire pe baza comportarii lor in regim nestationar,
variatia in timp a variabilei de iesire fiind legata de
variatia variabilei de intrare prin urmatoarea relatie:  (1)
(1)
Din structura relatiei rezulta ca dupa o variatie treapta (i0) a variabilei de intrare, variabila de iesire variaza in mod continuu, ca atare elementele integrale au coeficientul de transfer infinit de mare.
Constanta de proportionalitate Ki nu are deci semnificatia unui coeficient de transfer.
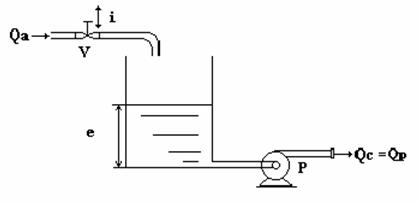
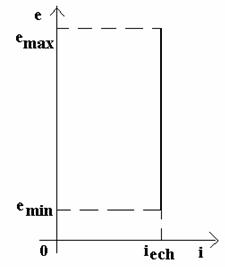
Elementele integrale rezulta din elementele proportionale prin suprimarea dependentei debitului de alimentare si a debitului de evacuare de valoarea variabilei de iesire. In cazul recipientului din figura influenta asupra debitului de scurgere se poate elimina prin evacuarea fortata a lichidului cu ajutorul unei pompe P. In acest caz, recipientul este in regim stationar numai pentru o singura valoare a variabilei de intrare, la care debitul de alimentare este egal cu debitul pompei.
Deoarece nivelul nu are nici o influenta asupra celor doua debite, in regim stationar poate avea orice valoare cuprinsa intre minim (recipient gol) si maxim (recipient plin). Aceasta situatie confirma faptul ca la elementele integrale coeficientului de transfer este infinit, caracteristica statica fiind o dreapta paralela cu axa variabilei de iesire.
Comportarea dinamica a elementului integral se studiaza presupunand ca la un moment dat, variabila de intrare incepe sa se abata de la valoarea de echilibru. Atunci debitul de alimentare variaza dupa o functie qa(t), apare un dezechilibrul intre alimentare si consum si nivelul e incepe de asemenea, sa varieze. Ca si in cazul elementului de acumulare proportional, viteza de variatie a nivelului va fi proportionala cu marimea dezechilibrului. Ecuatia comportarii dinamice contine numai derivata functiei care exprima variatia variabilei de iesire. e'(t) = Ki i(t)
Ca
atare, la elementele integrale, variabila de iesire prezinta o
viteza de variatie proportionala cu variatia
variabilei de intrare, spre deosebire de elementele proportionale la care
exista o proportionalitate directa intre variatiile celor
doua variabile. Integrand relatia se obtine ecuatia care
defineste comportarea elementelor integrale: 
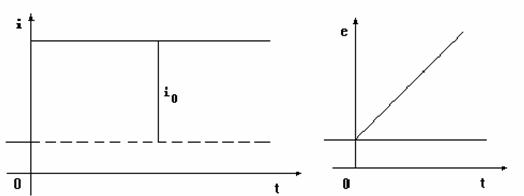
In conditiile semnalului treapta functia i(t) fiind o constanta i0, re1atia devine:
e(t) = Ki · i0 · t
Din relatie se constata ca raspunsul la semnal treapta al elementelor integrale este o variatie cu viteza constanta a variabilei de iesire
Daca se considera i0 = 1 si t = 1, rezulta: e(t)t = 1 = Ki
Relatia arata ca factorul de proportionalitate Ki este numeric egal cu variatia variabilei de iesire, efectuata in unitatea de timp, daca variabila de intrare a variat in salt cu o unitate.
Functia de transfer a elementelor integrale se obtine aplicand transformarea Laplace ecuatiei (1) si exprimand raportul:

![]()
Raspunsul
la frecventa rezulta din functia de transfer, prin
inlocuirea variabilei complexe s cu jω: 
![]()
Se
constata ca raspunsul la frecventa este negativ
si pur imaginar. In acest caz dependenta modulului ![]() si a defazajului
α, de pulsatie va li data de relatiile:
si a defazajului
α, de pulsatie va li data de relatiile:
 si α = - 90s
si α = - 90s
Raportul amplitudinilor scade cu cresterea frecventei, iar defazajul este independent de frecventa si are valoarea constanta de - 90°. Ca atare, locul de transfer are toate punctele situate pe axa imaginara negativa, incepe la - ∞ si se termina in origine .

Exemplu: Reactoarele sub presiune, la care variabila de iesire este nivelul, de asemenea sunt elemente integrale.
Elementul derivativ
Elementele derivative sunt caracterizate printr-o comportare dinamica la care variatia variabilei de iesire este proportionala cu viteza variabilei de intrare:
 (1)
(1)
Acestei comportari ii corespund urmatoarele relatii pentru functia de transfer Y(s), respectiv raspunsul la frecventa Y(jω):
Y(s) = Kd · s Y(jω) = j · Kd · ω
Se constata ca si in cazul elementelor derivative, raspunsul la frecventa este pur imaginar, dar spre deosebire de elementele integrale, are o valoare pozitiva si ca atare locul de transfer coincide cu axa reala pozitiva avand punctul initial in origine si terminandu-se la + ∞.

Aceasta situatie indica un avans de faza constant de 90°, pe care-l poseda oscilatiile variabilei de iesire in raport cu cele ale variabilei de intrare.
In cazul semnalului treapta, viteza de variatie a variabilei de intrare este teoretic infinit de mare in momentul aplicarii semnalului. Inainte si dupa aplicarea semnalului, viteza de variatie este zero si ca atare raspunsul la semnal treapta al elementului diferential consta intr-o variatie teoretic infinit de mare a variabilei de iesire. Aceasta variatie exista insa numai in momentul aplicarii semnalului, adica are durata infinit de scurta
Desigur, aceasta comportare nu poate fi realizata in practica si elementele de reglare caracterizate prin relatia (1) sunt denumite elemente derivative ideale.
Elementele derivative reale prezinta intarzieri in variatia variabilei de iesire deoarece in componenta lor intra si un element de acumulare al carui continut de substanta sau energie se modifica odata cu variabila de iesire.
Din aceasta cauza, la fel ca elementele proportionale de ordinul I, ecuatia comportarii dinamice mai contine in membrul stang un termen cu derivata variabilei de iesire, avand drept coeficient constanta de timp a elementului de acumulare: T · e'(t) + e(t) = Kd i'(t)
Elementele derivative de acest tip, denumite elemente derivative de ordinul I formeaza o parte functionala importanta a dispozitivelor de automatizare, intrucat avansul de faza caracteristic elementelor derivative, grabeste actiunea de reglare.
Functia
de transfer a elementului ED 1 are expresia: 
Raspunsul
la frecventa al elementului derivativ: 
Acestei variabile complexe ii corespunde modulul si argumentul:
![]()
Locul de transfer al elementului ED 1 este un semicerc care incepe in origine si se termina pe axa reala pozitiva, la o distanta egala cu Kd/T
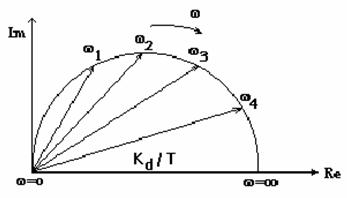
Din valoarea de 90° a defazajului la pulsatia zero, rezulta ca locul de transfer are in origine un punct de tangenta cu axa imaginara.
Se constata ca si elementul derivativ real asigura variabilei de iesire un avans, care insa depinde de pulsatie, fiind maxim la ω = 0 si dispare la ω = ∞.
Raspunsul la semnal treapta se obtine pornind de la relatia functiei de transfer (88), tinand cont de faptul ca in conditiile semnalului treapta I(s) = i0/s:
![]()
![]()
cu urmatoarea solutie : ![]()
care constituie expresia raspunsului la semnal treapta a elementului derivativ de ordinul l. Reprezentarea grafica a acestei expresii este:
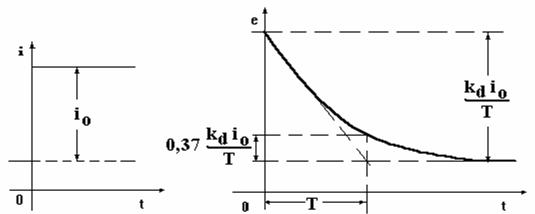
Se constata ca in momentul aplicarii semnalului treapta (t = 0), variabila de iesire efectueaza un salt de marime finita care este proportional cu semnalul de intrare i. Acest salt depinde si de parametri Kd si T ai elementului.
Grafic se obtine constanta de timp ducand o tangenta la curba raspunsului la semnal treapta in punctul corespunzator inceputului regimului tranzitor
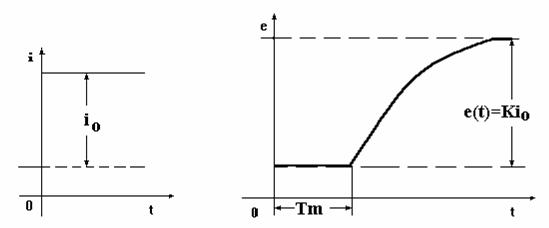
4. Elementul de reglare cu timp mort
Comportarea dinamica a elementelor de reglare, poate cuprinde si un timp mort Tm, prin care se intelege intervalul de timp de la variatia variabilei de intrare in care variabila de iesire ramane constanta, deci nu raspunde la semnalul de intrare.
Raspunsul la semnal treapta al elementelor de reglare cu timp mort sufera o deplasare pe axa timpului, deplasare care constituie timpul mort. Figura reda raspunsul la semnal treapta al unui element PI cu timp mort.
Timpul mort intervine in comportarea dinamica a unui element de reglare, daca acesta cuprinde portiuni prin care semnalul de reglare se propaga cu viteza finita. Aceasta parte a elementului de reglare poarta denumirea de element de intarziere pura.
In tehnologia chimica, elementele de intarziere pura intervin mai ales sub forma unor conducte lungi prin care circula fluide sau a unor benzi transportoare.
Comportarea dinamica a sistemelor de reglare automata depinde in egala masura de comportarea dinamica a procesului si a dispozitivului de automatizare. Comportarile dinamice ale celor doua elemente componente depind de comportarea dinamica a elementelor de reglare care intra in componenta acestora. De aceea cand se realizeaza o operatie de automatizare este foarte importanta identificarea procesului, care este exprimarea cantitativa a fenomenelor dinamice din interiorul procesului cu ajutorul modelelor matematice. Schema bloc a unui sistem automat de reglare este:
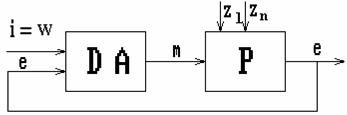
Procesul (P) este instalatia sau utilajul asupra caruia se realizeaza operatia de automatizare. Procesul se poate afla intr-o stare stationara cand variabila de iesire are o valoare constanta sau intr-o stare dinamica, tranzitorie, cand variabila de iesire se modifica datorita unor perturbatii externe.
Dispozitivul de automatizare (DA) sau de conducere (DC) intra in actiune atunci cand procesul este in regim dinamic, cu scopul de a-l readuce intr-o noua stare stationara, cat mai aproape de starea dorita. De foarte multe ori se suprapun doua sau mai multe stari dinamice datorate mai multor marimi de perturbatie respectiv si datorita actiunii proprii a procesului de automatizare.
Comportarea dinamica generata de actiunea dispozitivului de automatizare (DA) trebuie sa anihileze sub un anumit aspect comportarea dinamica generata si de marimea de perturbatie. Doar in acest fel se poate realiza conducerea procesului la performantele dorite.
Identificarea proceselor este ansamblul de metode si procedee prin care se urmareste obtinerea unor modele matematice cat mai reprezentative pentru procesul investigat. Teoria identificarii proceselor, este un domeniu important al automaticii avand in vedere ca sistemele de reglare automate se aleg functie de comportarea dinamica si statica a procesului. Identificarea poate fi:
. globala, caz in care se determina atat forma modelului cat si parametri si constantele ce intervin in ecuatiile acestora;
. parametrica, caz in care se cunoaste forma modelului matematic si se determina domeniul real de valori pentru parametri sau constantele ce apar in model.
In functie de tipul procesului investigat, de tipul identificarii adoptate precum si de gradul de precizie impus modelelor matematice, exista trei clase de metode de identificare:
. Metode analitice, au la baza ecuatiile matematice ce caracterizeaza legile care determina functionarea procesului.
. Metode experimentale, la care modelul matematic se determina pe baza masuratorilor directe ale valorilor variabilelor de intrare si iesire.
. Metode analitico-experimentale, utilizeaza atat calcule matematice cat si studii experimentale.
Fazele identificarii proceselor
Indiferent de metoda adoptata, identificarea are urmatoarele faze:
. Precizarea scopului identificarii.
In aceasta etapa trebuie exprimata optiunea pentru tipul de conducere ales in procesul investigat. Complexitatea modelului matematic depinde si de structura dispozitivului de automatizare (DA) avut la dispozitie, treptele fiind automatizarea, optimizarea, conducerea cu calculatorul.
. Determinarea propriu-zisa a modelului matematic.
Modelul matematic este un ansamblu de relatii care redau dependentele existente intre parametri constructivi si functionali ai unui proces investigat precum si relatii care exprima restrictii sau limitari pentru parametri reprezentativi. In actiunea de determinare a modelelor matematice, o importanta deosebita se acorda ipotezelor simplificatoare care se fac asupra procesului investigat. Un model matematic care tine seama de fenomene care au loc la detalii microscopice va fi greu de solutionat, ar cere timp indelungat sau nu s-ar putea efectua. Aceasta explica prezenta ipotezelor simplificatoare, mai ales daca ele se apropie de situatia reala din proces.
Exista trei subetape :
Se prezinta ipotezele simplificatoare care duc la posibilitatea evidentierii in structura procesului tehnologic a unor elemente de reglare ideale in care au loc fenomene de acumulare, disipare sau transformare de energie sau masa. Aceste elemente ideale pot fi caracterizate pe baza principiilor legilor din mecanica, fizica, chimie. Se tine cont de criteriile de similitudine dintre model si proces, se stabileste scara de similitudine dintre cele doua elemente.
Se determina forma modelului matematic scriind ecuatiile ce caracterizeaza elementele ideale componente. Forma modelelor matematice depinde mult si de tipul de conducere adoptat. Daca se opteaza pentru conducere cu regulatoare conventionale rezulta modele matematice simpliste, alcatuite din ecuatii diferentiale, algebrice, integrale.
Daca se opteaza pentru conducere optimala sau ierarhizata, se utilizeaza modele matematice vectoriale sau matriciale.
Dupa structura lor, modelele matematice se impart in doua clase mari:
Modelele matematice se mai pot clasifica si in functie de starea sistemului la un anumit moment:
. Stare stationara, rezultand modele matematice statice.
. Stare dinamica, rezultand modele matematice dinamice.
Indiferent din ce categorie fac parte, modelele matematice contin si relatii de restrictie, limitare, pentru valorile unor parametri mai reprezentativi. Ele se pot scrie numai pe baza unor date de proiectare.
Se realizeaza printr-o metoda analitico-experimentala. Analitic se imagineaza un sistem ipotetic de conectare in paralel a procesului investigat cu modelul matematic elaborat si la iesire se amplaseaza un punct de insumare.
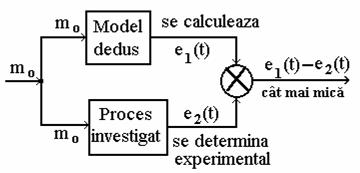
Se ia in discutie o singura relatie din model, care se poate verifica si experimental. Cel mai des se utilizeaza ecuatia raspunsului la semnal treapta.
Diferenta e1(t) - e2(t) se numeste criteriu de eroare sau de performanta al modelului si acesta trebuie sa aiba valoare cat mai mica.
Elaborarea concluziilor rezultate in urma operatiei de identificare.
In etapa a III-a de identificare, pe baza modelului matematic determinat, se stabileste numarul de elemente de reglare in proces, tipul elementelor de reglare si modul in care sunt conectate intre ele. Se tine cont de criteriile de similitudine alese si de scara de similitudine. Un model este viabil in raport cu un proces investigat daca criteriul de eroare este sub 40 % .
Modele matematice analitice
Pentru construirea modelelor matematice analitice se utilizeaza patru tipuri de ecuatii:
Ecuatii care descriu transportul marimilor conservabile (ecuatii de transport generalizate).
La
modul cel mai general, o anumita cantitate de substanta
omogena sau nu, in stare lichida sau gazoasa, care se afla![]() intr-un utilaj chimic, este caracterizata prin
urmatoarele marimi conservabile: masa totala,
masa/component, energie si impuls. Forma generala a
ecuatiei de transport generalizate este urmatoarea:
intr-un utilaj chimic, este caracterizata prin
urmatoarele marimi conservabile: masa totala,
masa/component, energie si impuls. Forma generala a
ecuatiei de transport generalizate este urmatoarea:
A = I - E - C (1)
A - reprezinta acumularea din marimea conservabila in elementul de volum al sistemului considerat si in unitatea de timp;
C - reprezinta consumul din marimea conservabila in unitatea de volum si in unitatea de timp;
I, E - reprezinta fluxurile din marimea conservabila care intra / ies in unitatea de timp din elementul de volum considerat.
Unitatea de volum considerat pentru care se aplica relatia (1) depinde daca sistemul este cu parametri concentrati (SPC) sau distribuiti (SPD).
In cazul sistemelor cu parametri concentrati, marimea conservabila se modifica continuu, elementul de volum se refera la intregul sistem luat in discutie.
In cazul sistemelor cu parametri distribuiti, elementul de volum se refera la un element diferential de volum din interiorul sistemului.
Aplicarea relatiei (1) la sisteme tehnologice complexe necesita descompunerea acestora in elemente componente, care fiecare in parte pot fi tratate ca elemente SPC sau SPD. In urma operatiei de identificare se specifica si comportarea elementelor de reglare din punct de vedere al distributiei parametrilor.
Fluxurile I, E implica un fenomen de transport al marimii conservabile care poate avea loc prin difuzie, convectie sau transfer interfazic. Termenul C din ecuatia (1) se datoreaza prezentei in sistem a surselor (consumatorilor) din interiorul procesului considerat.
Prin particularizarea ecuatiei de transport generalizate se scriu bilanturile de materiale, termice, impuls, molare.
Pentru descrierea unei faze lichide, solide sau gazoase, se utilizeaza un numar mare de marimi specifice numite proprietati. Dintre cele mai importante enumeram: concentratia, densitatea, masa, temperatura si entalpia.
Variabilele independente prin cunoasterea carora se pot determina toate celelalte variabile se numesc marimi sau variabile de stare iar relatiile care exprima legatura dintre variabilele independente si variabilele de stare se numesc ecuatii de stare.
Ecuatiile de stare ajuta prin forma lor la alegerea acelor variabile de decizie cu ajutorul carora procesul poate fi condus in directia dorita.
Exemplu: ecuatia generala a gazelor
Ecuatiile de stare pot caracteriza faze lichide, de vapori, de asemenea exista ecuatii de stare pentru entalpia lichidelor si a vaporilor (relatii foarte complexe).
Acestea exprima matematic conditiile conform carora intre doua faze omogene aflate in contact nu apar fenomene de transport ale concentratiilor, energiei sau impulsului.
Exemplu: Conditii de echilibru termice sau mecanice.
In ce priveste echilibrul concentratiei componentilor in sistem, in chimie intalnim echilibre interfazice si echilibre chimice.
Reactiile de echilibru se pot exprima prin marimi fictive sau direct masurabile, situatie in care si potentialele chimice trebuiesc exprimate prin marimi masurabile.
Aceste ecuatii apar asociate cu termenul vitezei reactiei chimice. Relatiile pot fi scrise pentru reactii de ordinul I, II, III sau superior. Cu cat creste ordinul reactiei, cu atat reactia ce defineste viteza de reactie este mai complicata.
Toate ecuatiile diferentiale ce caracterizeaza comportarea dinamica, impreuna cu ecuatiile caracteristicilor statice, cu functiile de transfer si cu raspunsurile la frecventa formeaza modelul matematic al unui element de reglare.
Exemplu: pentru elementul proportional de ordinul I, modelul matematic complet are urmatoarea forma:
![]()
Spre deosebire de modelele functionale de tipul intrare-iesire, reprezentarea elementelor de reglare, respectiv a sistemelor automate in spatiul starilor, este o problema mai complicata, presupunand utilizarea unui vector al starilor S(t), cu ajutorul caruia se poate defini starea sistemului in orice moment. Starea sistemului reprezinta o cantitate minima de informatii despre sistem, cu ajutorul careia se poate defini evolutia sistemului daca se cunoaste intrarea sa.
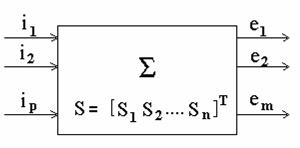
Cunoasterea starii la un moment initial t0, S(t0) si a intrarilor in sistem dupa momentul t0 permite determinarea starii la un timp ulterior t1, S(tl). Starea sistemului la un moment dat poate fi descrisa prin valorile unui set minim (liniar dependent) de variabile Si denumite variabile de stare: S = [S1 S2 S3 ...Sn]T
Acest vector al starilor apartine unui spatiu vectorial n-dimensional Σ, numarul starilor ce alcatuiesc acest vector de stare, definind ordinul sistemului considerat. Astfel, prin introducerea acestui vector de stare ce caracterizeaza comportarea intrinseca a sistemului la orice moment, modelul general al sistemului avand p intrari, m iesiri si n variabile de stare este prezentat in figura :
Sistemul considerat este un sistem multivariabil avand la intrare vectorul variabilelor de intrare i = [il i2 .. ip], la iesire vectorul variabilelor de iesire e = [e1 e2 .. em] si starea definita prin vectorul n-dimensional S(t) = [Sl S2 Sn]T.
In literatura de specialitate sunt prezentate diferite moduri de alegere a variabilelor de stare, pentru sisteme monovariabile si multivariabile.
Teoria moderna a sistemelor automate foloseste aceasta reprezentare matematica, mai bogata in continut, mai realista, cu ajutorul careia se pot studia sisteme cu grad inalt de complexitate, cu performante ridicate, lucru care asigura o buna compatibilitate cu mijloacele moderne de calcul numeric.
Simularea proceselor si a sistemelor automate
Raspunsurile in timp ale elementelor de reglare tip prezentate anterior pot fi studiate usor datorita simplitatii modelelor matematice asociate exprimate prin relatii cum ar fi: ecuatii diferentiale liniare de ordinul I, ecuatii algebrice, inegalitati. In marea majoritate a situatiilor, procesele chimice sunt alcatuite din mai multe elemente de reglare tip P, I, D si ca urmare modelele lor matematice in regim dinamic sunt complexe fiind exprimate prin sisteme de ecuatii diferentiale neliniare sau sisteme de ecuatii cu derivate partiale. Situatia este si mai complexa in cazul modelelor matematice de tip intrare-stare-iesire unde apar sisteme de ecuatii vectoriale si matriciale. In aceste sisteme, modelele matematice nu pot fi determinate pe cale analitica numai cu ajutorul calculelor numerice. Pentru acest lucru se utilizeaza tehnica numerica de calcul. La ora actuala exista pachete cu programe de algoritmi performante pentru rezolvarea numerica a acestor sisteme de ecuatii care simplifica activitatea utilizatorilor din domeniul identificarii proceselor.
Solutionarea cu ajutorul calculatoarelor a modelelor matematice dinamice asociate proceselor sau sistemelor automate pentru diferite conditii limita face parte din domeniul simularii proceselor.
Din punct de vedere al automatizarii proceselor, simularea este utilizata principial pentru rezolvarea a doua categorii de probleme importante:
. Simularea proceselor in vederea identificarii acestora fara a lua in discutie dispozitivele de conducere sau automatizare.
. Simularea proceselor si a tuturor dispozitivelor de automatizare pentru a putea determina cele mai bune structuri ale sistemelor automate. Simularea sistemelor automate permite si efectuarea unor studii de calitate si de stabilitate a acestora.
Exemplu de identificare a unui vas de amestecare din
tehnologia acidului sulfuric
In industria chimica sunt frecvent intalnite situatiile in care prin amestecarea continua a doua solutii cu concentratii diferite c1 si respectiv c2 sa se obtina o solutie de concentratie c3, care se evacueaza continuu din vasul de amestecare. Un astfel de exemplu se intalneste in industria acidului sulfuric, in sectiile de uscare-absorbtie ale anhidridei sulfuroase. In aceasta sectie se utilizeaza vase de amestecare pentru prepararea continua a agentului de stropire, pentru turnurile de uscare ale bioxidului de sulf, respectiv turnurile de absorbtie ale anhidridei sulfurice. In figura este prezentata schema de principiu a unui turn de absorbtie deservit de un vas de amestecare.
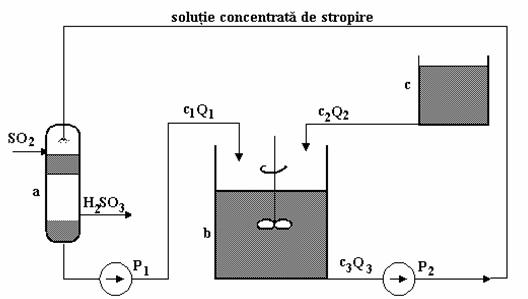
Absorberul a, este alimentat pe la partea superioara cu o solutie concentrata de acid sulfuric. La baza absorberului se colecteaza o solutie de acid, caracterizata prin concentratia c1 si debitul Q1. Aceasta solutie se introduce in vasul de amestecare b prin intermediul pompei P1, si se amesteca cu solutia de concentratie c2 si debit Q2 provenind din rezervorul c. In vasul b, rezulta o solutie de concentratie c3 care se evacueaza in mod continuu cu un debit Q3 asigurat de catre pompa P In felul acesta acidul extras continuu din vas poate fi recirculat pentru stropirea turnului de absorbtie.
Pentru operatia de identificare se parcurg urmatoarele etape:
. Precizarea scopului identificarii.
. Determinarea modelului matematic propriu-zis.
. Elaborarea concluziilor in urma operatiei de identificare.
Scopul identificarii este ca in vasul de amestecare sa se obtina o solutie de concentratie constanta c3 indiferent de concentratia c1 si debitul Q1 al solutiei rezultate la baza turnului de absorbtie. Pentru a realiza acest lucru se alege o marime de executie, care este debitul Q2 ce soseste de la rezervorul c. In principiu s-ar putea utiliza ca marime de executie si debitul Q1 dar acest lucru ar implica montarea unui element de executie dupa pompa P1 care ar reprezenta o rezistenta hidraulica variabila. Introducerea unei rezistente hidraulice variabile pe circuitul debitului Q1 ar putea modifica conditiile tehnologice din interiorul turnului precum si caracteristicile hidraulice ale pompei P1.
Determinarea propriu-zisa a modelului matematic, consta in parcurgerea urmatoarelor etape:
. Precizarea functiei scop.
. Determinarea unui model fizic.
. Determinarea modelului matematic propriu-zis
. Determinarea gradului de aproximare a modelului in raport cu instalatia experimentala.
Functia scop a modelului este aceeasi cu functia scop a identificarii si anume, mentinerea constanta a valorii concentratiei c3 a agentului de stropire.
Determinarea modelului fizic. Acesta este de obicei un model de laborator, alcatuit din componente ideale, deci printr-o metoda oarecare se idealizeaza fenomenele fizico-chimice care au loc in vasul de amestecare.
Pentru aceasta se apeleaza la doua ipoteze simplificatoare:
a) Se presupune ca volumul V al solutiei din recipient este constant, ceea ce se obtine printr-o reglare automata a nivelului, folosind ca marime de executie debitul Q3. Aceasta reglare suplimentara, aplicata vasului de amestecare, asigura in permanenta egalitatea dintre suma debitelor volumice ale solutiilor ce se introduc si debitul volumic de evacuare.
b) Presupunem ca agitarea solutiei este suficient de intensa pentru a putea mentine in conditii dinamice de lucru o masa omogena in tot vasul de amestecare.
Pentru a proiecta modelul de laborator ideal se utilizeaza criterii de similitudine si criterii de similitudine nespecifice. Astfel se utilizeaza:
. criterii geometrice; - se aleage un factor de scara aplicat inaltimii, diametrului, si volumului vasului;
. criterii tehnologice, pe baza carora se alege un factor de scara pentru debitele Q1, Q2, Q3 si respectiv pentru concentratiile c,, c2, c3.
. criterii hidrodinamice, pe baza carora se vehiculeaza solutia (legile lui Bernoulli; criteriul Reynolds care exprima raportul dintre fortele de inertie si cele de frecare din interiorul fluidului; criteriul Euler care se refera la marimea raportului dintre fortele de presiune si cele de inertie din interiorul fluidului; criteriul Prandtl care se refera la raportul dintre fortele de inertie si cele gravitationale din interiorul fluidului).
. daca este cazul, criterii de transmitere a caldurii (criteriul Nusselt, criteriul Grashoff, criteriul Galilei).
Modelul fizic ideal de laborator pentru vasul de amestecare ar trebui sa cuprinda doua sisteme de reglare automata pentru a implementa cele doua ipoteze simplificatoare.
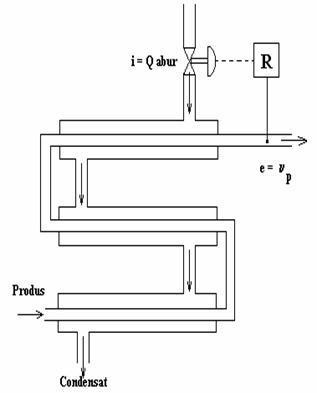
In figura este prezentata automatizarea aplicata vasului de amestecare.
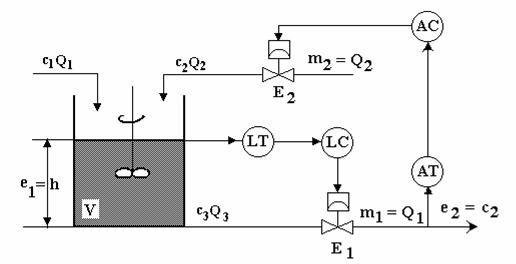
Se observa ca exista doua bucle de reglare. Primul sistem de reglare automata (I) este destinat mentinerii constante a nivelului de lichid (h) din vasul de amestecare, ceea ce implica si mentinerea constanta a volumului de lichid din vas. Pentru aceasta se realizeaza un montaj format dintr-un traductor de nivel LT, un regulator de nivel LC si un element de executie E1 amplasat pe conducta debitului Q3 (recirculare). Variabila de iesire (e1) a acestui sistem este inaltimea h a lichidului din vasul b iar marimea de executie m1 este debitul Q3. Daca h = const., rezulta ca si volumul V = const. si prima ipoteza simplificatoare este indeplinita.
Al doilea sistem de reglare automata (II), este alcatuit dintr-un traductor de concentratie AT, un regulator de concentratie AC si un element de executie E2 amplasat pe conducta debitului Q2, intre rezervor si vasul de amestecare. Variabila de iesire (e2) a acestui sistem este concentratia c3 iar marimea de executie m2 este debitul Q In acest fel se indeplineste si a doua ipoteza simplificatoare, concentratia C3 fiind omogena in toata masa lichidului.
Determinarea modelului matematic propriu-zis. La determinarea modelului matematic, pentru inceput se considera sistemul in regim stationar, si cele doua ipoteze simplificatoare adevarate. Ecuatia bilantului de materiale pentru vasul de amestecare se refera doar la cantitatea de acid sulfuric pur introdusa si evacuata in unitatea de timp.
Pentru V = constant, ecuatia bilantului este: Q1 + Q2 = Q3
in care debitele Q1.3 sunt debite volumice.
Considerand si concentratia constanta, bilantul de materiale se poate exprima prin relatia: Qa = Qc
Qa si Qc reprezinta cantitatea de acid sulfuric pur introdusa si respectiv evacuata din vas in unitatea de timp.
Bilantul de materiale se poate formula: c1Q1+c2Q2 = c3Q3
c1,c2,c3 - concentratii volumice ale celor trei solutii.
Membrul stang al ecuatiei constituie debitul de alimentare Qa, iar membrul drept debitul de evacuare Qc al vasului.
Stiind ca c3 este variabila de
iesire si Q2 variabila de executie si inlocuind
pe Q3 cu valoarea corespunzatoare se obtine: 
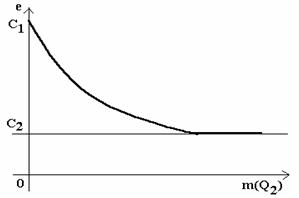
Relatia arata ca in regim stationar exista o dependenta univoca intre variabila de intrare si variabila de iesire a vasului de amestecare, dependenta care este insa neliniara.
In cazul exemplului considerat, c1 fiind mai mare decit c2, caracteristica statica are alura redata in figura.
Datorita neliniaritatii caracteristicii statice, comportarea dinamica a vasului de amestecare poate fi redata printr-o ecuatie diferentiala liniara cu coeficienti constanti, numai in cadrul unor variatii mici ale variabilelor e si m.
In timpul regimului tranzitor, cantitatea de H2S04 pur acumulata in unitatea de timp, ΔMac, in vas, este egala cu diferenta dintre cantitatea de H2S04 pur (in unitate de timp) ce se introduce in vas, qa(t), si cantitatea de H2S04 pur (in unitate de timp) care se evacueaza din vas, qc(t): ΔMac = qa(t) - qc(t)
ΔMac
se poate calcula inmultind coeficientul de capacitate C, cu viteza de
variatie a variabilei de iesire c3(t): 
Rezulta
: 
Variatia debitului de alimentare Qa rezulta din variatia debitului Q2: qa(t)= c2q2(t)
Debitul de consum c3Q3, se modifica in timpul regimului tranzitor datorita variatiei concentratiei c3, dar si datorita variatiei debitului Q3, care se modifica la fel ca si Q2, intrucit Q1 se considera constant. In aceste conditii, variatia debitului de consum qc(t) poate fi calculata prin intermediul derivatelor partiale ale expresiei debitului de consum in raport cu cele doua variabile:
Intrucat δQc/δc3 este egal cu Q3 si δQc/δQ3 este c3, pentru variatii mici:
Qc(t) = Q3 c3(t) + c3q3(t)
Avand in vedere ca variatiile debitelor Q2 si Q3 sunt egale, q3(t) poate fi inlocuit prin q2(t): Qc(t) = Q3 c3(t) + c3 q2(t)
Coeficientul de capacitate conform definitiei
generale este raportul dintre variatia continutului de acid sulfuric
pur din vas si variatia corespunzatoare a concentratiei acidului
sulfuric: 
Rezulta: V·c3'(t) = c2 · q2(t) - Q3 · c3(t) - c3 · q2(t) respectiv:
Notand raportul V/Q3, care are dimensiunea timpului, cu T, raportul dintre membrul drept cu K si tinand cont ca c3(t) este e(t), iar q2(t) reprezinta variatia variabilei de executie, m(t), rezulta: T · e'(t) + e(t) = K · m(t)
Se constata ca procesul automatizat este un element proportional de ordinul intai a carui constanta de timp si coeficient de transfer depind de parametri functionali ai vasului de amestecare.
In concluzie, modelul matematic al vasului de amestecare, este definit de urmatoarele relatii matematice:
.
ecuatia caracteristicii statice: 
.
ecuatia caracteristicii dinamice: 
.
functia de transfer: 
.
raspunsul la semnal treapta: 
.
raspunsul la frecventa: 
Ecuatiile de restrictie pentru diferiti parametri ai instalatiei raportati la criteriile de similitudine geometrice si tehnologice folosite pentru determinarea modelului fizic sunt:
. pentru concentratie: c11 ≤ c1 ≤ c12 ; c21 ≤ c2 ≤ c22 ; c31 ≤ c3 ≤ c32
. pentru volum: V1 ≤ V ≤ V2
. pentru debit: Q11 ≤ Q2 ≤ Q22
Pot apare restrictii si pentru debitul Q3, dar el este deja restrictionat prin limitelele impuse debitelor Q1 si Q
Determinarea gradului de aproximare a modelului in raport cu instalatia propriu - zisa. Verificarea se face pe cale analitica. Se utilizeaza un sistem ipotetic alcatuit din montarea in paralel a modelului matematic cu instalatia de amestecare. Cele doua elemente primesc acelasi semnal treapta q20. Semnalele de iesire se insumeaza algebric intr-un punct de insumare :
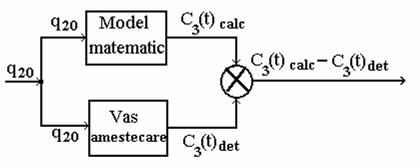
Pentru studiul experimental al comportarii dinamice a vasului se determina raspunsul la semnal treapta (c3(t) determinat). Pentru modelul matematic, se calculeaza ecuatia raspunsului la semnal treapta (c3(t) calculat). Diferenta dintre cele doua valori trebuie sa fie cat mai mica. Daca diferenta este mai mica de 0,2 rezulta ca modelul este veridic si pe baza lui se poate face identificarea vasului de amestecare. Concluziile trase in urma operatiei de identificare:
. Prin metodologia prezentata s-a facut o identificare globala a vasului de amestecare determinandu-se atat ecuatiile matematice de dependenta din structura modelului propriu-zis cat si valorile coeficientilor care intra in aceste ecuatii.
. S-au identificat si parametrii care intra concret in acesti coeficienti constanti. (constanta de timp T = V /Q3 si coeficientu1 de transfer K = ((c2 - c3).Q3).
. Din relatia care reflecta comportarea dinamica si ecuatia de raspuns la semnal treapta rezulta ca vasul se comporta ca un element proportional de ordinul I iar raspunsul la semnal treapta contine un singur termen exponential. In identificare, cu cat numarul elementelor de reglare din instalatie este mai mare este mai mare si numarul de relatii matematice din structura modelului, creste numarul ecuatiilor de restrictie si al criteriilor de similitudine pentru modelul fizic. De aceea identificarea pentru elementele proportionale de ordinul II si superior sau care contin si elemente integrale este greu de efectuat prin metoda anterior prezentata. In aceste situatii se apeleaza la simularea proceselor si a sistemelor.
Copyright © 2025 - Toate drepturile rezervate