|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
REGLAREA AUTOMATA A TENSIUNII SI PUTERII REACTIVE
IN SISTEMELE ELECTROENERGETICE
( RAT - Q )
1 NECESITATEA SI AVANTAJELE INTRODUCERII RAT - Q IN
SISTEMELE ELECTROENERGETICE
Reglarea automata a tensiunii si puterii reactive ( RAT - Q ) presupune asigurarea unui echilibru local intre puterile reactive generate, respectiv consumate Qg ,Qc, spre deosebire de reglarea frecventei si puterii active , care se realizeaza printr-un echilibru global intre puterile active generate, respectiv consumate.
S-a presupus un generator sincron echivalent GS , care debiteaza pe barele unui sistem S , de putere infinita. In aceasta schema monofilara (fig 8.1) avem: Ed - tensiunea electromotoare , valoare eficace pe faza; U - tensiunea pe bare , valoarea eficace pe faza; Xd - reactanta sincrona longitudinala a generatorului tinand seama de saturatie; Xe - reactanta elementelor de legatura dintre generator si bare : Xd + Xe = X. Marimile notate cu indicele g sunt marimi electrice caracteristice generatorului , cele notate cu indicele c sunt marimi electrice caracteristice pe partea unui consumator echivalent.
Pentru simplificare vom presupune ca φe = φc = φ. S-a notat, deasemenea : δ - unghi electric intern dintre tensiunea U si Ed. (figura 8.1.).
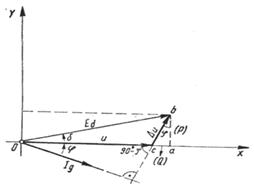
Fig. 8.2 Diagrama fazoriala a tensiunilor si curentilor pentru schema din fig. 8.1
Mentinerea constanta a tensiunii pe bare implica mentinerea constanta a tensiunii la bornele generatorului. In figura 8.2. s-a reprezentat diagrama fazoriala a tensiunilor si curentilor cu neglijarea caderilor de tensiune de natura rezistiva , astfel ca ΔU = X Ig . Protectia acestor fazori pe axele de coordonate permite scrierea relatiilor 8.1 , 8.2 si 8.3.
Ed sinδ = XIg cosφ (8.2)
u = Ed cosδ - XIg sinφ = Ed - XIgr
unde Ed U si XIgr reprezinta perturbatia
Din relatia 8.3 se observa ca tensiunea , care este parametrul reglat scade , in raport cu valoarea de consemn U0 atunci cand creste componenta reactiva Igr = Ig sinφ. Rezulta ca perturbatia in cazul RAT - Q , este curentul sau puterea reactiva generata, respective consumata. De altfel la o alta scara dupa amplificarea cu modulul curentului segmental ab din figura 8.2 reprezinta puterea activa, iar segmental ac puterea reactiva, generate sau consumate.
Se mai pot scrie relatiile 8.4 si 8.5 din care rezulta ca variatia de tensiune sau reactanta determina variatii ale unghiului electric intern δ. Se cunoaste ca acest unghi are o importanta deosebita in pastrarea stabilitatii functionarii in sistem , trebuind sa nu depaseasca o anumita valoare limita δlim =Π/2.Se pot scrie deasemenea relatiile 8.6 si 8.7, care arata ca Pg si Qg sunt functie de U, Ed, X, δ. Ed este direct legata de excitatia masinii sincrone generatoare, iar X de reactanta longitudinala in sistem.
![]() (8.4)
(8.4)
 (8.5)
(8.5)
![]() (8.6)
(8.6)
![]() (8.7)
(8.7)
In figura 8.3 este reprezentata schema functionala a unui sistem de reglare automata a tensiunii la generator ( RAT - G). Eroarea de tensiune este: εu=U0 - Ug, si se obtine la iesirea comparatorului diferential EC, din figura 8.3.
Se observa ca regulatorul RAT - G actionat de eroarea de tensiune εu contine un element sensibil ES, un element de amplificare EA si un element de executie EE. Tensiunea de comanda Ue de la iesirea regulatorului actioneaza asupra sistemului de excitatie a generatorului sincron, care aplica la infasurarea rotorica a acestuia tensiunea de excitatie Ue, respectiv curentul de excitatie Ie, determinand cresterea sau scaderea parametrului reglat, care este tensiunea la borne Ug. Perturbatia este abaterea de putere reactiva ΔQg. Obiectul RAT - G este mentinerea constanta sau intre anumite valori a tensiunii intr-un nod (de exemplu pe barele B) independent sau slab dependenta de variatia puterii reactive. Principalele avantaje ale introducerii reglarii automate a tensiunii (RAT) sunt urmatoarele:
1) RAT - fortand excitatia generatorului sincron reduce cresterea unghiului electric δ si mareste stabilitatea functionarii; totodata se mareste si puterea maxima ce poate fi debitata in regim static de functionare;
cresterea stabilitatii dinamice a functionarii in sistemul energetic;
reducerea valorilor care marcheaza scaderea tensiunii pe bare
asigurarea autopornirii motoarelor asincrone alimentate de la aceste bare si evitarea aparitiei fenomenului de avalansa de tensiune in SEE;
4) cresterea sensibilitatii protectiilor prin relee la functionarea in regim minim;
5) ameliorarea calitatii energetice electrice produsa si livrata consumatorilor, pastrand tensiunea de alimentare in limitele admise.
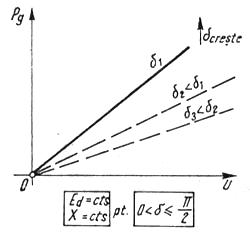
Fig.8.4 Variatia Pg= Pg(U), pentru Ed=ct, X=ct, d=parametru
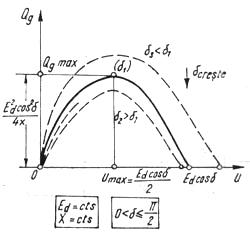
Fig. 8.5 Variatia Qg= Qg(U) pentru Ed=ct, X=ct, d=parametru
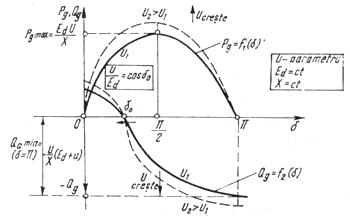
Fig. 8.6 Variatiile Pg, Qq in functie de d, pentru Ed=ct, X=ct, U=parametru
In figurile 8.4, 8.5 si 8.6 s-au reprezentat variatiile puterii active Pg, respective reactive Qg in raport cu tensiunea pe bare U si in raport cu unghiul electric intern δ, pentru Ed = ct. si X = ct., avand pe δ, respective U ca parametric.
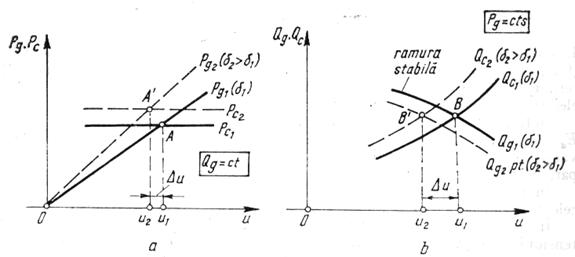 Fig. 8.7 Variatia
puterilor generate si consumate cu tensiunea:
Fig. 8.7 Variatia
puterilor generate si consumate cu tensiunea:
a-variatiile Pg, Pe in functie de U, pentru d=parametru, Ed si X=ct
b-variatiile Qg, Qc in functie de U, pentru d=parametru, Ed si X=ct
Aceste variatii sunt determinate de ecuatiile 8.6 si 8.7. In figura 8.7, a si b, se evidentiaza functia de autoreglare a tensiunii la consumator in sistemul electroenergetic. In general, la consumatori puterea consumata Pe , este constanta, dar puterea reactiva Qg creste cu tensiunea, de aceea in figura 8.7 b s-a reprezentat doar jumatatea din dreapta a curbei tip parabola din figura 8.5, care asigura functionarea stabila. Asa cum se poate vedea in figura 8.7 a, la cresterea lui Pe punctul de functionare se muta din A in A', tensiunea scade de la U1 la U2 si creste de la δ1 la δ2. Aceste variatii pot deveni inacceptabile pentru consumatori si pentru sistem. Acelasi lucru rezulta din figura 8.7 b pentru puterile reactive, respective consumate; de aceea, a devenit necesar sa se recurga la reglarea automata tensiune - putere reactiva, in locul autoreglarii in anumite limite la consumatorii de energie electrica.
Pentru a ilustra acest avantaj al RAT - Q la generator ne referim in continuare, la figura 8.8 ( absenta RAT - G ) si figura 8.9 ( reprezenta RAT - G ).
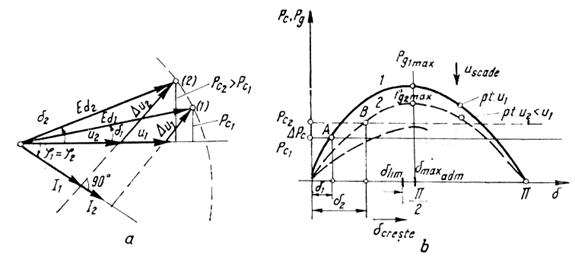 Fig. 8.8 Cazul
absentei RATG:
Fig. 8.8 Cazul
absentei RATG:
a-diagramele fazoriale tensiune-curent; b-variatiile Pg, Qg in functie de d
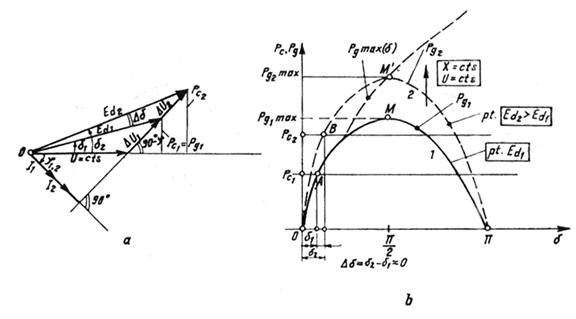 Fig. 8.9 Cazul
existentei RATG:
Fig. 8.9 Cazul
existentei RATG:
a-diagramele fazoriale tensiune-curent; b-variatiile Pg, Qg in functie de d
● In cazul absentei RAT-G(fig.8.8.a),pentru ca nu variaza excitatia generatorului sincron, fazorul tensiunii electromotoare Ed are modulul constant si varful sau descrie un cerc cu centrul in origine. Orice crestere de putere de la 1 la 2, determina cresterea semnificativa a unghiului electric δ , de la δ1 la δ2.Pe curba din fig 8.8.b, s-au prezentat puterile Pc si Pg in functie de δ. Cand creste puterea de la Pc1 la Pc2, curba sinusoidala scade din 1 in 2,punctul de functionare se muta din A in B, si δ variaza mult de la δ1 la δ2 de valoarea extrema δlim Presupunem apoi ca exista RAT-G, fig.8.9a.b.Tensiunea la borne este mentinuta constanta la valoarea U, cresterea lui δ este mult mai mica sub valoarea limita δlim . Aceasta se poate vedea si in fig.8.9.b ca urmare a fortarii excitatiei generatorului sincron, deci a cresterii tensiunii electromotoare de la Ed1 la Ed2, curba 1 se deplaseaza in 2, in sens invers ca mai inainte, astfel ca pentru noul punct de functionare stabila din B, la o putere Pc2>Pc1, variatia ∆δ= δ2- δ1 este mult mai mica decat cea din cazul absentei reglarii.
● Marirea stabilitatii dinamice(capacitatea sistemului ca in cazul unor variatii bruste de tensiune, ca urmare a unor defecte apropiate sau nelichidate la timp, sa se regaseasca in puncte de functionare stabila pe curba Pg in functie de δ dupa trecerea regimului tranzitoriu).
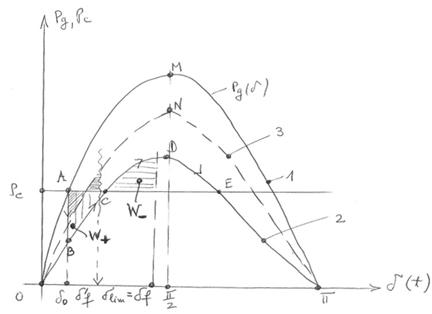
Fig.8.10 - Cresterea stabilitatii dinamice a SEE sub actiunea RAT-G
a) Regim de dupa avarie fara RAT - G : la scaderea tensiunii, curba 1 se muta in pozitia 2; ca urmare intersectia Pg = Pe are loc in punctual C.
Punctul de functionare se muta din A in B (fig 8.10) la acelasi δ0 unde puterea generata este mai mica decat Pc si masina incepe sa se accelereze, din B in C. Acceleratia suplimentara posedata de rotorul masinii in C, face ca punctual de functionare sa treaca din C spre D, unde Pg>Pc si ca urmare masina sincrona generatoare incepe sa se franeze.
Cum produsul [P![]() δ(t)] are dimensiunea unei energii, se defineste o
arie (figura 8.10) de accelerare, corespunzator energiei de accelerare (W+)
si o arie de franare -
corespunzator energiei de franare (W-). La restabilirea
echilibrului, cand (W+)=(W-) rezulta un unghi electric
intern δlim , apropiat (sau chiar depasind) valoarea
π/2.
δ(t)] are dimensiunea unei energii, se defineste o
arie (figura 8.10) de accelerare, corespunzator energiei de accelerare (W+)
si o arie de franare -
corespunzator energiei de franare (W-). La restabilirea
echilibrului, cand (W+)=(W-) rezulta un unghi electric
intern δlim , apropiat (sau chiar depasind) valoarea
π/2.
Din punctul de vedere al asigurarii stabilitatii in sistem trebuie ca δ final sa nu treaca de o valoare limita( <∏/2 ) si care depinde de dimensiunile si structura sistemului electroenergetic.
b) Regim de dupa avarie cu RAT-G: curba 1 se muta in pozitia 3, unde (W+_)<< si deci δfinal= δ'f este mult mai mic.
Creste stabilitatea functionarii si se mareste rezerva de stabilitate in sistemul electroenergetic.
Copyright © 2026 - Toate drepturile rezervate