|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
Tema
Sa se proiecteze un automat secvential pentru preambalari in industria alimentara.
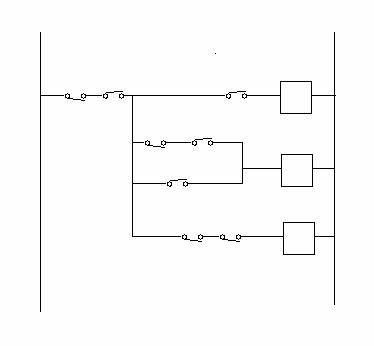
Instalatia permite preambalare produselor alimentare in pungi de plastic, prin sudarea intre ele a doua folii-una inferioara, alta superioara-, dupa ce, in prealabil, aerul a fost scos din punga-ambalaj. Schema de principiu a instalatiei este prezentata in figura 1, in care s-a notat cu :
BC: banda transportoare (are o miscare sacadata) si poarta pe ea caserolele ce vor contine pachetele cu produs preambalat;
MA: motor pentru antrenarea BC;
CS: caserola;
BF1 : rola pentru antrenarea foliei inferioare de material plastic;
BF2: rola pentru antrenarea foliei superioare de material plastic;
I: incalzitor;
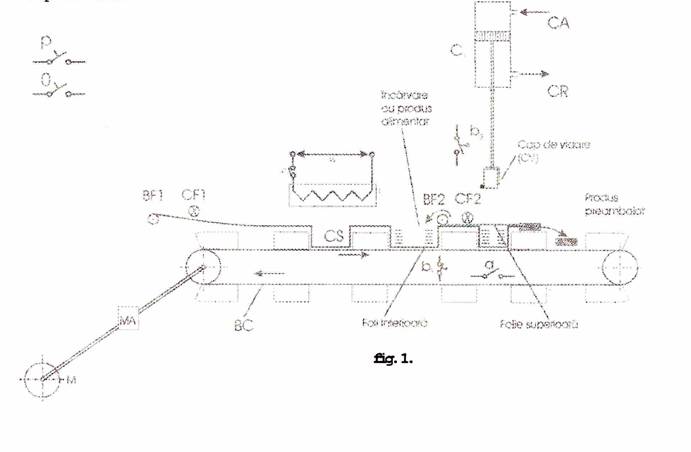 CV: cap de vidare.
CV: cap de vidare.
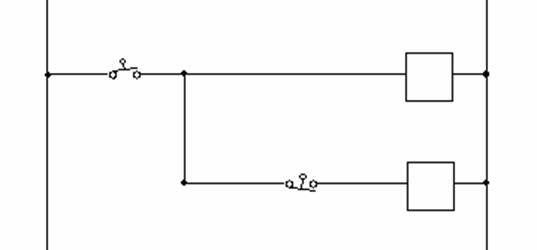
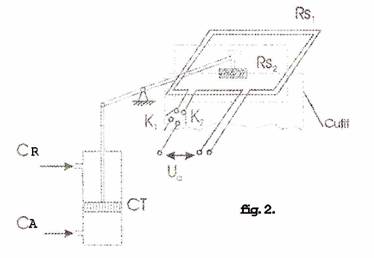 Elementele principale ale CV sunt prezentate in figura 2. Instalatia
cuprinde urmatoarele subansamble:
Elementele principale ale CV sunt prezentate in figura 2. Instalatia
cuprinde urmatoarele subansamble:
O banda transportoare BC pe care se afla caserolele in care se vor introduce pe rand: folia de plastic inferioara, produsul alimentar si apoi folia superioara. Un mecanism de antrenare asigura o miscare sacadata a benzii. Timpul de oprire al benzii intre 2 pasi este reglabil (depinde de RT1 si de RT2).
Un incalzitor I, cu rezistenta, care permite mularea foliei inferioare, antrenate de pe o rola (BF1), pe fundul caserolei.
Un cap de vidare CV, care este un mecanism complex si indeplineste functiile:
a). Sudeaza incomplet, cu ajutorul ramei de sudare 1, RS1, foliile inferioara si superioara (termic, cu rezistente montate pe RS1.(figura 2).
b). Evacueaza aerul din ambalaj prin cuplarea la o pompa de vid (actioneaza un electroventil care pune in legatura pompa de vid cu caserola si ambalajul).
c). Sudeaza complet, cu ajutorul ramei RS2, ambalajul (sudura termica).
d). Taie ambalajul la un capat cu ajutorul unui cutit actionat de tija unui cilindru hidraulic .
CICLUL DE FUNCTIONARE
In starea de repaus, BC este instabila.
La apasare pe butonul p (pornit), BC face un pas, fiind antrenata de M. Un contact de fund , a, al postului de lucru, sesizeaza daca exista produs alimentar in caserola ce se afla in dreptul postului de lucru.
In caz ca a=0 (nu exista produs), capul de vidare nu este actionat si BC mai executa un pas. Urmeaza acelasi test.
Daca a=1, CV este actionat de tija cilindrului de coborare C1, pana cand este atins un limitator B1 de
cap de cursa. In acelasi moment, o data cu CV, sunt coborate ramele de sudare RS1, RS2 si are loc sudarea incompleta, pe o durata data de un releu de timp RT1(Se comanda inchiderea contactului K1 si astfel trece curent prin rezistenta ramei RS1. Dupa un timp, reglat prin releul RT1, contactul K1 este deschis, sudura fiind terminata).
Se comanda un electroventil care pune in legatura camera caserolei si ambalajul cu o pompa de vid si astfel are loc evacuarea aerului din ambalaj. Durata vidarii este reglata printr-un releu de timp RT2.
In momentul decuplarii pompei de vid, se inchide contactul K2 si are loc sudura completa, prin rama RS2, pe o durata de timp egala cu cea data de RT1.
La sfarsitul sudurii complete, un distribuitor electro-hidraulic comanda cilindrul CT in cursa activa. Tija cilindrului antreneaza lama unui cutit care taie ambalajul la unul din capete. Sfarsitul cursei este dat de inchiderea limitatorului t.
Inchiderea limitatorului t comanda ridicarea simultana a cutitului si a capului de vidare.
Cursa de revenire a capului CV este controlata de atingerea limitatorului de cursa inferioara, b2.
Inchiderea lui b2 permite reluarea ciclului.
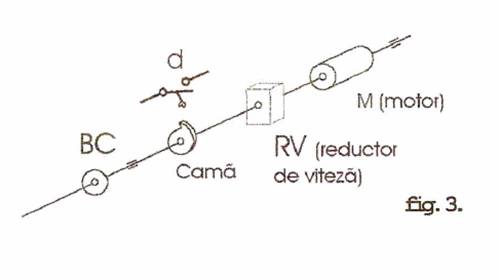 Antrenarea benzii transportoare BC
se face printr-un motor electric prevazut cu reductor de viteza (figura 3). O
cama inchide dupa o rotatie completa un limitator d, (montat dupa reductor). O
rotatie completa corespunde deplasarii
cu un pas (o caserola) a benzii BC.
Antrenarea benzii transportoare BC
se face printr-un motor electric prevazut cu reductor de viteza (figura 3). O
cama inchide dupa o rotatie completa un limitator d, (montat dupa reductor). O
rotatie completa corespunde deplasarii
cu un pas (o caserola) a benzii BC.
Proiectul va contine urmatoarele scheme de comanda:
Comanda motorului M de antrenare a benzii transportoare BC.
Comanda incalzitorului I.
Comanda coborarii si urcarii capului de vidare CV.
Comanda sudarii incomplete a foliilor de plastic.
Comanda cutitului de taiere.
OBSERVATII. Vor fi luate in considerare urmatoarele interblocari:
a.) O celula fotoelectrica CF1 interzice comanda incalzitorului I daca nu exista folie pe rolatorul BF1 al foliei inferioare. De asemenea, blocheaza antrenarea BC si a CV.
b.) O celula fotoelectrica CF2 interzice comanda CV daca nu exista folie pe rolatorul BF2 al foliei superioare si opreste BC.
Comanda motorului M de antrenare a benzii transportoare BC
Variabilele primare pentru antrenarea benzii BC sunt : p,o,d,b2,t, iar variabila de iesire M.
Butoanele p si o permit cuplarea schemei de comanda a intregii instalatii. Ele sunt introduse intr-o schema clasica cu automentinere. In starea initiala, cama inchide limitatorul d, iar capul de vidare CV se afla in pozitia limita superioara (b2 =1). Realizam o variabila artificiala t printr-un releu RT cu temporizare la inchidere si un releu T, comandat de contactul normal deschis rt al releului RT. Realizam astfel o temporizare τ=tRT din momentul inchiderii de catre cama a contactului d.
Daca in tot timpul tRT , incepand din momentul aparitiei starii initiale, b2 nu devine 0 ( nu coboara) CV, rezulta ca nu exista produs de preambalat in caserola din dreptul CV si in momentul aparitiei semnalului t motorul va fi cuplat. Se desface d datorita rotirii motorului, dar se asigura mentinerea pe inca un timp scurt, tDT a contactului t, prin releul DT, cu temporizare la deschidere. In momentul cand s-a efectuat o rotatie completa la motor (un pas al benzii transportoare BC) se revine in starea initiala de asteptare (M decuplat). De fiecare data cand din starea initiala apare mai intai t (in raport cu desfacerea lui b2) se repeta ciclul descris mai sus. Daca insa, o data aflati in starea initiala, se desface b2 intr-un interval de timp mai mic decat tRT (adica exista produs, a=1), motorul va ramane blocat. In continuare, apare t, dar M=0 si cand b2 redevine 1 (s-a incheiat ciclul complex de la postul de lucru), se tranziteaza in starea care permite efectuarea unui nou pas si pozitionarea unei noi caserole sub CV. In plus se vor introduce interblocarile date de fotodiodele CF1, CF2 pentru existenta foliei inferioare, respectiv superioare.
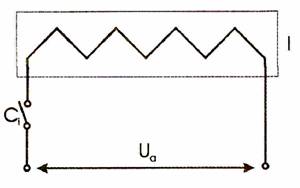
Comanda incalzitorului I(comanda combinationala-figura 4)
Incalzitorul va contine in schema de alimentare un contact ci care poate fi inchis numai atunci cand instalatia este pornita si exista folie inferioara (CF1=0).
Comanda coborarii si urcarii capului de vidare CV
Pentru comanda capului de vidare se utilizeaza un cilindru hidraulic C1 cu dublu efect, comandat de un distribuitor electrohidraului DC1( vezi figura 5). Variabilele primare sunt urmatoarele: contactul a (pentru prezenta de produse de preambalat), a=0 inhiba comanda de coborare a bratului, CF2(pentru prezenta foliei superioare de plastic), n-indica starea de functionare a motorului m de antrenare pas cu pas a benzii transportoare BC, b2-limitatorul de cap de cursa superioara a capului de vidare CV,cT-llimitatorul de cap de cursa de coborare a cutitului, b1-limitatorul de cap de cursa inferioara a CV.
 Variabila de iesire se noteaza cu CCV (comanda cap de vidare).
Variabila de iesire se noteaza cu CCV (comanda cap de vidare).
Comanda sudarii incomplete a foliilor de plastic (comanda intrerupatorului k1)
Pentru comanda inchiderii contactului k1 (care prin inchidere permite trecerea curentului prin RS1) se poate utiliza (intr-o prima varianta) o schema cu releu de temporizare la inchidere, RT1, (durata acestei temporizari da timpul de sudare). Sudarea incompleta este initiata in momentul in care capul de vidare CV, in miscarea sa de coborare, a atins limitatorul de fund b1. Se va studia si solutia fara releu cu temporizare.
Comanda cutitului de taiere
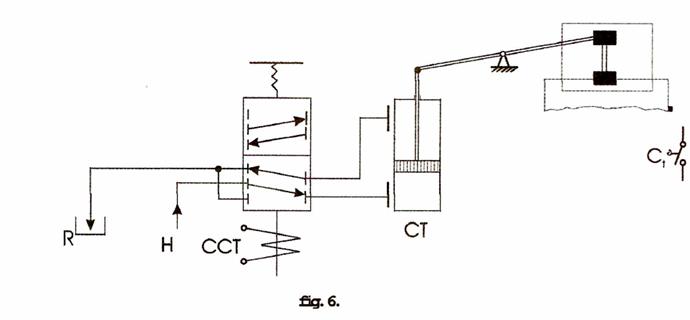
Schema de principiu a actionarii cutitului este prezentata in figura 6. Se utilizeaza un cilindru CT alimentat de un distribuitor electrohidraulic (releul CCT). Variabilele de comanda sunt : p-incheiere sudura completa, c-limitator de cursa activa a cutitului. Variabila de iesire: CCT (releul distribuitorului electrohidraulic).
OBSERVATIE. Se considera ca dupa efectuarea taierii (cT=1) prin comanda impusa se elibereaza mai intai limitatorul ct si imediat apoi p (reglaj mecanic).
Proiectul va cuprinde urmatoarele puncte:
Diagrama de semnale : "intrari-iesiri" pentru automatul secvential proiectat.
Determinare matricei(tabelei) primitive a starilor.
Reducerea numarului de stari ale tabelei primitive (construirea matricei reduse a starilor).
Codificarea starilor matricei reduse
Determinarea matricelor tranzitiilor starilor si obtinerea functiilor de excitatie ale automatului.
Determinarea matricelor iesirilor si a functiilor de iesire ale schemei.
Implemantarea schemei cu relee si contacte electrice.
Analiza schemei obtinute.
1. Comanda motorului
Exista doua cazuri de functionare a motorului M:
daca nu exista produs de ambalat in caserola (a=0);
daca exista produs de ambalat in caserola (a=1).
Diagrama de semnal pentru cazul in care nu exista produs in caserola (a=0) :
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() S0 S1 S2 S3 S4
S0 S1 S2 S3 S4
![]() d 01
d 01
![]() b2 01
b2 01
![]()
![]()
![]()
![]()
![]() t 01
t 01
![]()
![]()
![]()
![]()
![]() M 01
M 01
1 2 3
![]()
![]() tRT tDT
tRT tDT
se inchide cama d=1
nu exista produs a=0, b2 nu se modifica
soseste impulsul t, se actioneaza motorul M
s-a facut o rotatie completa a motorului, cama se inchide d=1, motorul se opreste M=0.
Diagrama de semnal pentru cazul in care exista produs in caserola (a=1) :
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() S0 S4 S5 S1 S2 S3 S0
S0 S4 S5 S1 S2 S3 S0
![]()
![]()
![]()
![]()
![]() d 01
d 01
![]() b2 01
b2 01
![]()
![]()
![]()
![]()
![]() t 01
t 01
![]()
![]()
![]()
![]()
![]() M 01
M 01
![]()
![]() 1 2 3 4
1 2 3 4
tRT tDT
se inchide cama d=1
exista produs a=1, iar b2 devine 0
a aparut impulsul t, dar cum b2=0, motorul nu mai este actionat
CV a ajuns sus b2=1 se actioneaza n pentru a pozitiona o noua caserola
Matricea primitiva a starilor
Matricea primitiva a starilor pentru comanda motorului este:
|
db2t sk |
M |
||||||||
|
S0 |
S0 |
S1 |
S4 | ||||||
|
S1 |
S2 |
S1 | |||||||
|
S2 |
S2 |
S3 | |||||||
|
S3 |
S3 |
S0 | |||||||
|
S4 |
S5 |
S4 | |||||||
|
S5 |
S1 |
S5 |
Matricea completa a iesirilor
Are aproximativ aceeasi dimensiune ca matricea primitiva a starilor. Se completeza situatiile de nedefinire astfel:
iesirile pentru starile stabile;
iesirile pentru starile instabile.
Astfel daca :
a) starile stabile intre care are loc tranzitia au aceleasi iesiri si àsj este absolut obligatoriu ca in cursul starii instabile sa se pastreze iesirea neschimbata;
b) cand tranzitia are loc intre doua stari stabile cu iesiri diferite si àsj
daca tranzitia are loc in prima jumatate a intervalului de tranzitie, iesirea starii instabile corespunde cu iesirea starii stabile;
daca tranzitia are loc in a doua jumatate a intervalului de tranzitie, starea instabila sj are iesirea corespunzatoare starii stabile si.
|
db2t sk | ||||||||
|
S0 | ||||||||
|
S1 | ||||||||
|
S2 | ||||||||
|
S3 | ||||||||
|
S4 | ||||||||
|
S5 |
Reducerea matricii primitive a starilor Poligonul alipirilor (fuziunilor))
Iesirea trebuie sa fie identica in cele doua stari. Astfel cele 6 stari se pot alipi dupa cum urmeaza:
S1 cu S2 si S3 vor forma A(1,2,3)
S0 cu S4 si S5 vor forma B(0,4,5).
Matricea redusa a starilor este:
|
db2t sk | ||||||||
|
A(1,2,3) |
S2 |
S3 |
S0 |
S1 | ||||
|
B(0,4,5) |
S0 |
S1 |
S5 |
S4 |
Matricea redusa a iesirilor este:
|
db2t sk | ||||||||
|
A(1,2,3) | ||||||||
|
B(0,4,5) |
Matricea codificata si redusa a starilor
Codificarea matricii reduse a starilor si iesirilor se face conform relatiei 2p>q unde q este numarul starilor reduse, p numarul variabilelor de stare necesare pentru a codifica q stari reduse.
Astfel avem 2 stari reduse q rezula ca avem o variabila de stare y (p ) si o singura functie de excitatie Y.
|
db2t y | ||||||||
|
S2 |
S3 |
S0 |
S1 | |||||
|
S0 |
S1 |
S5 |
S4 |
Matricea codificata si redusa a iesirilor
|
db2t y | ||||||||
Intocmirea matricii starilor si obtinerea functiilor de excitatie
Este practic matricea codificata si redusa a starilor unde, in locul starii se trece codul prin care a fost codificata starea respectiva. Astfel A(1,2,3) a fost codificata cu 0 iar B(0,4,5) cu 1.
|
db2t y | ||||||||
Tabelul de forma 4x4 este:
|
b2t dy | ||||
|
| ||||
|
|
|
|||
Functia de excitatie
este Y=![]()
Matricea iesirilor si obtinerea functiei de iesire este, practic, matricea codificata a iesirilor care are forma de 4x4 urmatoare.
|
b2t dy | ||||
|
| ||||
![]() Functia
de iesire este
Functia
de iesire este![]()
![]()
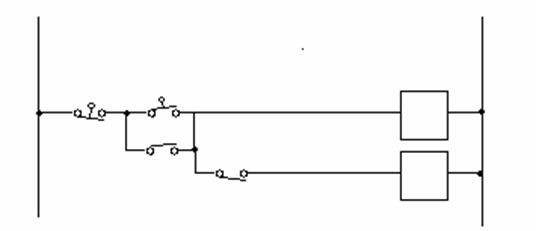
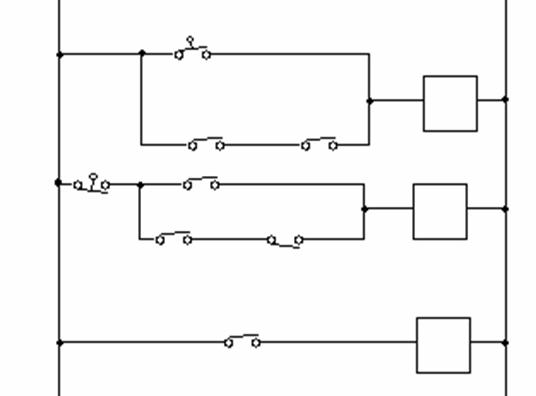
Implementarea a functiei de comanda a motorului M
O p
r R
d D
DT
dt RT
rt T
CF1 CF2 t d
b2 Y
d
b2 t M
2. Comanda incalzitorului
Cum incalzitorul depinde in functionarea sa doar de semnalul diodei CF1 schema poate fi implementata direct.
a p
r R
CI
CF1
Astfel daca exista folieà CF1 inchis, se actioneaza releul CI care inchide contactul Ci
Astfel daca nu exista folieà CF1 deschis, se actioneaza releul CI care deschide contactul Ci
3. Comanda coborarii si urcarii capului de vidare CV
Variabilele de comanda sunt:
contactul a;
fotodioda CF2;
starea de functionare a motorului M -n;
limitatorul cap de cursa superioara a capului de vidare CV -b2;
limitatorul cap de cursa inferioara a capului de vidare CV -b1;
limitatorul de cap de cursa de coborare a cutitului -ct;
Deoarece fotodioda CF2 si contactul a blocheaza coborarea capului de vidare CV indiferent de celelalte semnale, ele pot fi integrate in schema automatului de comanda ca realizand operatia logica SI astfel:
Daca CF2=1 si a 1 se executa coborarea si urcarea capului de vidare CV.Daca una este 0 nu se face nimic.
 CF2 a
CF2 a
Restul circ. de comanda al
CV
Diagrama de semnal este
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() S0 S1 S2 S3 S2 S1 S0
S0 S1 S2 S3 S2 S1 S0
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() n 01
n 01
![]()
![]()
![]()
![]() b2 01
b2 01
![]()
![]()
![]()
![]()
![]()
![]() ct 01
ct 01
![]()
![]()
![]()
![]() CCV 01
CCV 01
CF2=1 si a 1 banda se roteste n
s-a oprit banda n=0, CCV=1, se coboara capul de vidare;
ca urmare a coborarii capului de vidare s-a deschis b2
se efectueaza operatiile de sudura incompleta,vidare, sudura completa;
taindu-se produsul,cutitul ajunge jos, si se comanda urcarea capului de vidare CCV
Matricea primitiva a starilor
|
nb2ct sk |
CCV |
||||||||
|
S0 |
S1 |
S0 | |||||||
|
S1 |
S2 |
S1 | |||||||
|
S2 |
S2 |
S3 | |||||||
|
S3 |
S4 |
S3 | |||||||
|
S4 |
S4 |
S5 | |||||||
|
S5 |
S5 |
S0 |
Matricea completa a iesirilor
|
nb2ct sk | ||||||||
|
S0 | ||||||||
|
S1 | ||||||||
|
S2 | ||||||||
|
S3 | ||||||||
|
S4 | ||||||||
|
S5 |
|
Reducerea matricii primitive a starilor Poligonul alipirilor (fuziunilor))
Iesirea trebuie sa fie identica in cele doua stari. Astfel cele 6 stari se pot alipi dupa cum urmeaza:
S1 cu S2 vor forma A(1,2)
S3 cu S4 si S5 vor forma B(3,4,5).
S0 ramane singur si va forma C
Matricea redusa a starilor
|
nb2ct sr | ||||||||
|
A(1,2) |
S2 |
S3 |
S1 | |||||
|
B(3,4,5) |
S4 |
S3 |
S5 |
S0 | ||||
|
C(0) |
S1 |
S0 |
Matricea redusa a iesirilor
|
nb2ct sr | ||||||||
|
A(1,2) | ||||||||
|
B(3,4,5) | ||||||||
|
C(0) |
Codificarea matricii reduse a starilor
 Avem 3 stari reduse care se
pot codifica cu 2 variabile. Pentru a pastra proprietatea de adiacenta se va
mai adauga o stare suplimentara D pentru a codifica toate starile adiacent.
Avem 3 stari reduse care se
pot codifica cu 2 variabile. Pentru a pastra proprietatea de adiacenta se va
mai adauga o stare suplimentara D pentru a codifica toate starile adiacent.
00
10 01
11
Matricea codificata si redusa a starilor
|
nb2ct y1 y2 | ||||||||
|
S2 |
S3 |
S1 | ||||||
|
S4 |
S3 |
S5 |
S0 | |||||
|
S1 |
S0 |
Matricea codificata si redusa a starilor
|
nb2ct y1 y2 | ||||||||
Intocmirea matricii starilor si obtinerea functiilor de excitatie Y1 si Y2
|
nb2ct y1 y2 | ||||||||
|
nb2ct y1 y2 | ||||||||
|
| ||||||||
Functia de excitatie
este Y1=![]()
|
nb2ct y1 y2 | ||||||||
|
|
| |||||||
|
| ||||||||
Y1=![]()
Matricea iesirilor si functia de iesire
|
nb2ct y1 y2 | ||||||||
|
|
Z=![]()
Implementarea cu relee si contacte
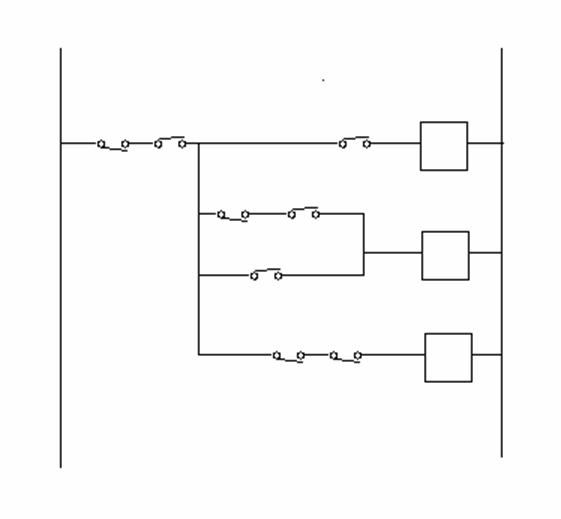
CF2 a n
Y1
n y2
Ct Y2
y1 y2
CCV
4. Comanda sudarii incomplete a foliilor de plastic
Diagrama de semnal
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() b1 01
b1 01
![]()
![]()
![]() K1 01
K1 01
Implementarea schemei
b1
RT
rt1
K1
5. Comanda cutitului de taiere
Variabilele de comanda sunt:
P - incheiere sudura completa;
Ct - limitator de cursa activa a cutitului;
Diagrama de semnal
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() S0 S1 S2 S3 S0
S0 S1 S2 S3 S0
![]()
![]() p 01
p 01
![]()
![]()
![]()
![]()
![]()
![]() Ct 01
Ct 01
![]()
![]()
![]()
![]()
![]() CCT
CCT ![]()
in momentul in care s-a terminat sudura(p 1) se actioneaza cutitul(CCT
cand s-a incheiat sudura se activeaza limitatorul de cursa activa a cutitului (Ct
Matricea primitiva a starilor
|
pCt sk |
CCT |
||||
|
S0 |
S0 |
S1 | |||
|
S1 |
S2 |
S1 | |||
|
S2 |
S2 |
S3 | |||
|
S3 |
S0 |
S3 |
Matricea completa a iesirilor
|
pCt sk | ||||
|
S0 | ||||
|
S1 | ||||
|
S2 | ||||
|
S3 |
Reducerea matricii primitive a starilor(Poligonul alipirilor (fuziunilor))
 Cele 4 stari se pot alipi dupa cum
urmeaza:
Cele 4 stari se pot alipi dupa cum
urmeaza:
S0 va fi A(0)
S1 va fi B(1)
S2 cu S3 vor forma C(2,3).
Matricea redusa a stariilor
|
pCt sr | ||||
|
A(0) |
S0 |
S1 |
||
|
B(1) |
S2 |
S1 |
||
|
C(2,3) |
S0 |
S2 |
S3 |
Matricea redusa a iesirilor
|
pCt sr | ||||
|
A(0) | ||||
|
B(1) | ||||
|
C(2,3) |
Codificarea matricii reduse a starilor
 Avem 3 stari reduse care se pot
codifica cu 2 variabile. Pentru a pastra proprietatea de adiacenta se va mai
adauga o stare suplimentara D pentru a codifica toate starile adiacent.
Avem 3 stari reduse care se pot
codifica cu 2 variabile. Pentru a pastra proprietatea de adiacenta se va mai
adauga o stare suplimentara D pentru a codifica toate starile adiacent.
10 01
Matricea redusa si codificata a starilor
|
pCt y1 y2 | ||||
|
S0 |
S1 |
|||
|
S2 |
S1 |
|||
|
S0 |
S2 |
S3 |
Matricea redusa si codificata a iesirilor
|
pCt y1 y2 | ||||
Intocmirea matricii starilor si obtinerea functiilor de excitatie Y1 si Y2
|
pCt y1 y2 | ||||
|
pCt y1 y2 | ||||
|
| ||||
|
| ||||
Y1=![]()
|
pCt y1 y2 | ||||
|
|
Y2=![]()
Matricea iesirilor si functia de iesire
|
pCt y1 y2 | ||||
|
|
Z=![]()
 Implementarea schemei
Implementarea schemei
ct
Y1
p y1
Ct y2
p y2 Y2
y1
CCT
6. Analiza
Analiza implementarii cu relee a motorului M
La apasarea butonului p, releul R inchide contactul r asigurand trecerea curentului prin circuit si dupa incetarea actiunii asupra butonlui p; la apasarea butonului o releul R nu mai este alimentat si se deschide contactul r astfel incat prin circuit nu mai circula curent dupa incetarea actiunii asupra butonului o.
Cazul a=0(nu exista produs)
In starea s0 d=1 deci: d inchis,t inchisàDT inchide dtàRT este alimentat à Y face ca y(linia 4) inchis, y(linia 5) deschisà nu se roteste motorul M
b2=1 atunci b2(linia41) inchis iar b2(linia42) deschis;
Daca nu exista produs in caserola b2 ramane 1à are loc inchiderea Ct dupa un timp tRT àT alimentat deschide tà Y nu mai este alimentatà y(linia 4) se deschide, y(linia 5) se inchideà se actioneaza M pentru a aduce urmatoarea caserola. Se deschide dàdupa un timp tDT de deschide dtà se deschide rt à de deschide dà T inchide t. La finalul unei rotatii a motorului M se inchide d(linia 2) si d(linia4) ne regasim in starea initiala s0.
Cazul a=1(exista produs de ambalat in caserola)
d(linia 2) inchis, DT inchide dt, d(linia4) inchis, t inchis, b2=1 atunci b2(linia41) inchis iar b2(linia42) deschis àY este alimentat à y(linia 4) inchis, y(linia 5) deschisàmotorul nu se roteste;
daca exista produsà b2 devine 0à are loc modificarea lui b2 inainte de inchiderea rt;
b2 inchis, à Y continua sa fie alimentat prin t si d chiar daca b2 se deschideà y continua sa fie deschisà motorul M nu se roteste;
dupa tRT Rt inchide rtàT este alimentat deschide t;
CV isi termina operatiile
b2 devine 1à b2 se inchide àY nu mai este alimentatàd se inchideàM se roteste àd se deschide , b2 la fel, d(linia 2) se deschide dupa timpul tDT, DT deschide dtàRT deschide rtàT se inchide;
dupa o rotatie a motorului M se inchide d(linia 2) si d(linia4) si ne aflam in starea initiala.
In orice moment deschiderea lui CF1 sau CF2 opreste motorul M.
Analiza incalzitorului
La apasarea butonului p, releul R inchide contactul r asigurand trecerea curentului prin circuit si dupa incetarea actiunii asupra butonlui p; la apasarea butonului o releul R nu mai este alimentat si se deschide contactul r astfel incat prin circuit nu mai circula curent dupa incetarea actiunii asupra butonului o.
Circuitul este alimentatàCI alimentatà I incalzeste
CF1 deschis(nu avem folie)à CI nu mai este alimentat deci nu mai incalzeste
CF1 inchis(avem folie)à CI este alimentat deci I incalzeste.
Analiza functionarii capului de vidare CV
Initial n à n1(linia 1) inchis iar n(linia2) deschisà Y1 este alimentatày1(linia 4) deschisà CCV este sus;
b2=1 b2 nu conteaza in acesta implementareàY2 nu este alimentatày2(linia 4) inchis;
n devine 0 (se opreste banda)àn(linia1) deschisà Y1 nu este alimentatà n(linia 2) inchis(coboara CCV)àCCV este alimentat;
Ct(linia 3) devine 1(s-a taiat produsul)à Ct inchisà Y2 este alimentatày2(linia2) inchis Y2 este alimentat àn(linia 2) deschisàCCV nu mai este alimentat(incepe sa urce) ;
Ct devine 0 (cutitul revine din cursa sa)à Ct(linia 3) dar Y2 continua sa fie alimentat prin ramura 2;
n devine 1(se roteste motorul)à n1(linia 1) se inchideà Y1 este alimentatày1(linia4) deschis
n(linia2) se deschideà Y2 nu mai este alimentatày2(lina 4) inchisàprin linia 4 nu mai circula curent adica CCV nu mai este alimentat si s-a ajuns in starea initiala.
In absenta foliei dioda CF2 se deschide si se opreste instalatia.
Absenta produsului de ambalat a=0 face ca acest circuit de comanda sa nu faca nimic (CCV ramane sus).
Analiza comenzii sudurii incomplete a foliilor de plastic
Initial b1=0à b1este deschis
Se inchide b1àRT1 este alimentat , dupa un timp tRT RT comanda deschiderea rt1àK1 este alimentat (adica se sudeaza)
K1 nu mai este alimentatàs-a incheiat sudura.
Analiza comenzii cutitului de taiere
Initial p=0àp(lina 2)deschis, p(lina 4)deschisàY1 nu este alimentat ày1(linia 2) deschis,y1(lina 4) inchis ;
Ct=0à Ct(linia1) este deschis, Ct(linia3) inchisà Y2 nu este alimentatà y2(linia 3) si y2(linia 5) deschiseà CCT nu este alimentat;
Dupa tRT3 releul RT3 comanda terminarea sudarii complete iar p devine 1;
P=1à p(lina 2) si p(lina 4) inchiseà Y2 este alimentat pe linia 4, y2(linia 3) inchis àY2 este alimentat si pe linia 3
y2(linia 5) inchis àCCT este alimentat (se coboara cutitul de taiere);
cuttitul si-a terminat cursa à Ct devine 1à Ct(linia1) inchisà Y1 este alimentat pe linia 1à y1(linia 2) inchis, y1(lina 4) deschis;
Ct(linia2) deschisà Y2 nu mai este alimentat pe nici o ramura à y2(linia 5) deschiseàCCT nu este alimentat (cutitul este sus);
Cand cutitul a urcat Ct devine 0à Ct(linia1) deschisà Y1 este alimentat dar prin linia 2
Ct(linia3) inchisàp devine 0àp(linia2) si p(linia4) sunt deschise àam ajuns in starea initiala.
Copyright © 2026 - Toate drepturile rezervate