|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
ASPECTE PRIVIND STRUCTURA UNUI STRUNG REVOLVER CU COMANDA NUMERICA CU POSIBILITATE DE PRELUCRARE
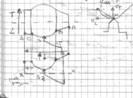
In figura a.) este reprezentat 3D architectural componenta strungului realizat in constructie modulara( cerinta pentru unele masini cu CN,acestea asigura un grad ridicat de flexibilitate).Se disting elemente de structura (batiu central, batiu cu ghidaje inclinate, papusa fixa dispusa la capatul din stanga al batiului de baza,un ansamblu de 2 sanii SL si ST se afla un ansamblu cap revolver este prevazut cu un nr de locasuri pe suprafata periferica si cea frontala in care se dispun sculele prin intermediul port sculelor.Pt explicarea in figura b.) sunt prezentate discuri port scule (partial) port scula fixate pe disc si care actineaza scula(freze deget) care efectueaza prelucrarea pe suprafata frontala, a unei piese disc dipusa, fixate si antrenata de dispozitivul de prindere al mandrinei cu bacuri.La capatul din dreapta al batiului pe ghidaje longitudinale se adapteaza un al doilea ansamblu AP-lagare pozitinate fata in fata si coaxial cu AP al papusii fixe.Fiecare arbore principal are antrenare proprie.
In figura c.) sunt prezentate caracteristicile mecanice ale motoarelor care antreneaza arborii principali.Se distinge usor care sunt (un cuvant idiot scris de ada neinteles de feno) de reglare a turatiilor la cuplu constant dar mai ales la putere constanta.
Dnas p=ct: 440..3500, Rnap=3500/440(ncmax/ncmin)
Sunt prezentate 2 caracteristici de functionare cu un alt regim normal de 240Nm si un alt regim de durata scurta (P=15Kw; cuplu=237Nm)
Figura d.) indica variatia turatiei AP intre 500...4000 de rot/min in regim de accelerare)cca 6 s si 5 s la decelerare)
Strungul este prevazut cu urmatoarele axe comandate numeric:
-axa Z-axa axelor AP
-axa X-axa in lungul careia se deplaseaza pe ghidaje ST
-axa Y-formeaza cu axele X si Z un sistem rectangular
-axele C1 si C2-axe de rotatie a AP-pt miscare de pozitionare figura c1.) si miscare de avans circular(fig c2,f,g,h)
Pentru generarea prelucrarea canalului pe o suprafata frontala a piesei sunt 2 pozitii:
1-cu piesa fixa (fig c1) si ST in miscare de avans
2- cea din (fig c2) in care suprafata canalului este prelucrata rezultata din combinarea a 2 miscari de rotatie a piesei(cu axa C1) si de miscare de avans a ST(axa X)
Alte posibilitati:
Fig f.) -prelucrarea unor suprafete plane
-componente ale unei suprafete hexagonale
Fig g.)-prelucrarea unui canal elicoidal pe suprafata cilindrica periferica a piesei
In ambele cazuri sunt indicate miscarile pe axele comandate numeric.
In fig l.) este prezentat display-ul (date;e furnizate prin stimularea prealabila de prelucrarea a piesei) Se stabileste astfel daca param introdusi sau alesi din meniu corespund dpdval cerintelor tehnologice.
In fig k.) sunt prezentate 2 forme ale piesei in partea din stanga prelucrarea unor suprafete ale acesteia in AP din stanga folosind scule dispuse in discuri port scula transferal piesei din dipozitivul de prindere al primului Ap in dispozitivul de prindere al 2-lea se face prin deplasarea rapida a SL(axa B) spre stanga si retragerea ei in pozitia initiala drepta.Ultima reprezentare indica prelucrarea piesei in prinderea a 2-a.
MASURAREA DEPLASARILOR SI VITEZELOR LA MUCN
Deplasarile in miscarea de avans si/sau de pozitionare de diferite ansambluri pe directiile ale axelor comandate numeric sunt comandate de ECN.In acest scop pt fiecare axa CN se prevad cate 2 bucle de reactie :
-bucla de deplasare
-bucla de viteza

MNO-realizeaza deplasarea intr-un sens si in alt sens cu viteaza de avans Vf sau cu viteza de deplasare rapida.
Lungimea curesi de deplasare si viteza pe timpul deplasarilor sunt controlate cu cele 2 bucle de reactie.Intre TRz si TGz se stabileste un flux:
Ansamblul mobil trebuie sa se deplaseze cu o viteza de avans Vf=312 mm/min pe directia z 12mm
Vf-viteza de avans pe axa Z=parametru tehnologic
Vf-312m/mm-este controlata de bucla de viteza (b1)
Z-12mm-deplasarea pe axa Z este controlata de bucla (b2)
LC de avans pozitinal al SV(axa Z) este constituit dintr-un motor electric alternativcu turatie reglabila si un mecanism de precizie cu elemente intermediare (surub-piulita).Acest LC este realizat in 2 variante :
a.) fara reductor
b.) cu reductor
Surubul conducator este lagaruit/sustinut de ambele capete cu rulmenti rot. si axiali.
Masurarea lungimii deplasarii ansamblului actionat de SV se face cu un traductor relative TRz.Masurarea vitezei cu care se deplaseaza ansamblul actinat se face cu cun tehnogenerator care masoara turatia motorului electric.Aceasta turatie crorespunde vitezei programate Vf=312mm/min
Legatura dintre motor si surub este directa:
nMEZ=Vf/Pscz=312/6=52rot/min
Pt actionarea SV si a ST este constituita cate o axa comandata numeric constructive din motor si mecanismul surub piulita si in aceste cazuri exista pereche de bulce pt fiecare element.
Masurarea propriu-zisa deplasarii se realizeaza cu traductoare, se folosesc 2 tipuri de traductoare numerice care sunt inclementare si absolute semnalule emis de traductor este reprezentat printr-un nr in codul binar sau prin impulsuri de fapt unitatea de lungime este divizata intr-un nr finit de diviziuni deci inclemente.
Prin masurarea impulsurilor intr-un numarator electric se obtin informatii privind deplasarea organului de lucru actinat.Traductore analogice -SERSIN,INDUCTOSIN,OPTICE.
Principiul de functionare al lor are la baza notarea semnalului emis de traductor.Acesta poate fi o tensiune a carei amplitudine sau faza variaza in conditii in functie de deplasare.Intre cei 2 parametrii(amplitudine si faza)si deplasarea miscarii este stabilit o dependenta exprimata printr-o functie trigonometrica(cosinus sau sinus)
SISTEME DE URMARIRE (COPIERE) UTILIZATE LA MU
Prelucrarea de copiere la MU consta in realizarea cinematica a treaiectoriei generatoare sau directoare pe baza unei marimi de intrare furnizate de un port program avand modificari intr-un anumit mod forma traiectoriei ce trebuie generata.Suprafata periferica este construita din AB cu segment de dreapta BC-segment de curba, CD-segment de dreapta.Curba CT se genereaza ca traiectorie a unu punct informational al taisului sculei, Sz-sesizor- citeste punctul din program si transmite miscarea 1h corespunzatoare.
Vt-viteza miscarii de copiere si este variabila
Vl-viteza miscarii de transport
Viteza rezultanta Vrez-variabila, axa suport a acestuia viteza este tangenta in punctul curent
3-palpatorul citeste printr-un sistem optic,curba
M al curbei generate si care pentru portiunea variabila.
Legatura intre port-program si scula se face prin intermediul unor mecanisme constituite in LC de copiere.AcesteLC se folosesc la strunguri ,la masini de frezat,la unele masin de rectificat,la unele masini de rabotat.Acestea se deformeaza prin modul de actionare si pri mat semnalului furnizat de sesizor.
Copyright © 2025 - Toate drepturile rezervate