|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
CIRCUITE ELECTRONICE PENTRU REGLAREA PROCESELOR RAPIDE
Procesele tehnologice rapide sunt caracterizate prin viteze mari de variatie a marimilor reglate; astfel ele se intalnesc in domeniul actionarilor electrice si echipamentelor electromagnetice. Actionarile electrice realizeaza comanda si reglarea motoarelor electrice de toate tipurile; rolul echipamentelor electroenergetice este de a furniza sau transforma energia electrica, redresoarelor, invertoarele, convertoarele de frecventa si de c.c.
Marimile reglate in cadrul acestor procese tehnologice sunt:
marimi de pozitie (distante, unghiuri);
viteze (liniare si de rotatie);
electrice si magnetice (curent, tensiune, flux magnetic).
Dintre conditiile impuse de catre industrie sistemelor automate de reglare a proceselor rapide sunt demne de mentionat urmatoarele:
- o gama larga de variatie a marimii reglate (de exemplu, turatia unui motor poate fi reglata intre doua valori aflate in raportul 1:100);
- viteza mare de raspuns (efectul unei variatii bruste a sarcinii trebuie sa fie inlaturat in 100 ms);
- precizie mare a reglarii (1% sau chiar -1%);
- constanta in timp a parametrului reglat;
- nivel redus al semnalelor de intrare.
Si pentru reglarea proceselor rapide au fost elaborate sisteme de blocuri unificate prezentand avantajele mentionate in paragraful 3.1. Semnalul standard folosit in majoritatea acestor sisteme este o tensiune continua variind in domeniul: -10V / +10V.
In tara noastra a fost elaborat sistemul de reglare unificat pentru procese rapide UNIDIN.
Elementele de automatizare folosite in sistemele de reglare a proceselor rapide au o serie de particularitati care decurg din natura marimilor reglate ca si din conditiile pe care trebuie sa le indeplineasca, impuse de procesele tehnologice. In continuare vor fi tratate doua categorii de elemente de automatizare din aceste sisteme si anume:
traductoarele;
regulatoarele automate.
1. Traductoare pentru reglarea proceselor rapide
Aceasta categorie de elemente de automatizare este ilustrata cu ajutorul a doua exemple de traductoare ale caror marimi de intrare sunt de natura diferita:
traductorul de flux magnetic;
traductorul de turatie.
Principiul de functionare al traductorului de flux magnetic consta in masurarea raportului dintre tensiune si frecventa, raport proportional cu fluxul.
Intr-adevar,
infasurarile transformatoarelor si ale masinilor electrice pot fi considerate
inductante pure, rezistentele lor fiind neglijabile. Daca unei asemenea
inductante i se aplica o tensiune alternativa sinusoidala ![]() sin
sin ![]() , aceasta este egala cu tensiunea contraelectromotoare e:
, aceasta este egala cu tensiunea contraelectromotoare e:
![]()
Pe de alta parte, ![]() unde
unde ![]() este fluxul
prin miezul infasurarii. Rezulta:
este fluxul
prin miezul infasurarii. Rezulta:
![]()
Se observa ca amplitudinea fluxului magnetic ![]() este proportionala cu
raportul dintre amplitudinea tensiunii si frecventa ei.
este proportionala cu
raportul dintre amplitudinea tensiunii si frecventa ei.
Intrucat se doreste ca informatia asupra
valorii fluxului sa fie furnizata sub forma unei tensiuni continue, schema bloc
a traductorului se prezinta ca in figura 1. In bobina se introduce o tensiune
proportionala cu tensiunea la bornele infasurarii in care se doreste masurarea
fluxului. Rezistenta ![]() de intrare a
redresorului este foarte mica, astfel ca valoarea eficace a curentului prin
bobina are expresia:
de intrare a
redresorului este foarte mica, astfel ca valoarea eficace a curentului prin
bobina are expresia:
![]()
si este proportionala cu fluxul de masurat. Curentul redresat I proportional cu ![]() , trece prin rezistenta R,
dand nastere unei tensiuni continue proportionala cu
, trece prin rezistenta R,
dand nastere unei tensiuni continue proportionala cu ![]() si in consecinta cu
fluxul de masurat.
si in consecinta cu
fluxul de masurat.
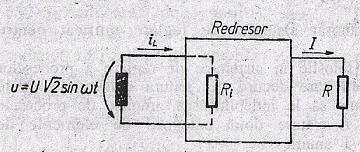
Fig. 1. Schema-bloc a traductorului de flux magnetic.
Traductoarele de turatie pot fi analogice sau de impulsuri.
Din prima categorie fac parte tahogeneratoarele de c.c.; ele sunt generatoare electrice de c.c. cu flux constant dar de magneti permanenti; tensiunea electromotoare furnizata este proportionala cu turatia.
Mai precis si mai stabile, traductoarele de impulsuri convertesc turatia unui ax intr-o succesiune de impulsuri a caror frecventa este proportionala cu aceasta turatie. Daca aceste impulsuri au amplitudinea si durata constante, prin redresarea lor se obtine o tensiune continua proportionala cu frecventa lor.
Conversia turatiei unui ax intr-o succesiune de impulsuri este ilustrata cu ajutorul detectorului fotoelectric din figura 2. Pe axul controlat se monteaza discul D in care sunt practicate un numar de orificii circulare. Pe o parte a discului se fixeaza o sursa luminoasa S (bec, LED) iar pe cealalta un receptor optoelectronic (fotodioda, fototranzistor), la trecerea unui orificiu prin fata sursei S, la iesirea dispozitivului optoelectronic apare un impuls de curent, asadar frecventa acestei suite de impulsuri va fi egala cu produsul dintre numarul de orificii si turatia axului.
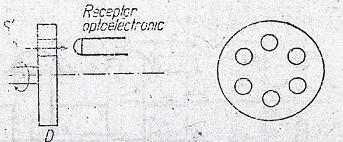
Fig. 8.2. Principiul de functionare a detectorului fotoelectric.
Pentru obtinerea unei tensiuni continue proportionala cu turatia axului, iesirea detectorului fotoelectric din fig. 2 trebuie aplicata unui formator de impulsuri la iesirea caruia se cupleaza un convertor frecventa-tensiune ca in figura a carei functionare poate fi urmarita cu ajutorul formelor de unda din figura
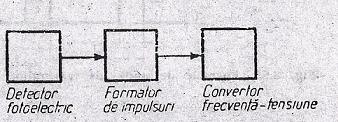
Fig. 8. Schema-bloc a unui traductor de turatie cu detector fotoelectric.
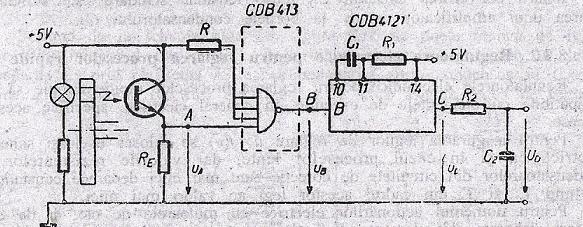
Fig. 8. Schema electrica a unui traductor de turatie cu detector fotoeletric.
Fototranzistorul se
deschide numai atunci cand primeste lumina pe baza prin orificiul discului, iar
restul timpului este blocat, de aceea, curentul prin rezistenta ![]() si tensiunea
si tensiunea ![]() la bornele acestei
rezistente au forma indicata in figura 8.5.
la bornele acestei
rezistente au forma indicata in figura 8.5.
Formatorul de impulsuri este in acest caz constituit din circuitul integrat CDB 413 (trigger Schmitt) si circuitul basculant monstabil integrat CDB 4121.
Pe trei dintre cele
patru intrari ale circuitului CDB 413 se aplica semnalul "I" logic astfel ca
circuitul se comporta ca un inversor fata de succesiunea de impusuri uA
aplicata pe cea de a patra intrare. Circuitul basculant monostabil transforma
impulsurile ![]() de la iesirea
triggerului Schmitt in impulsuri stabile de amplitudine U a caror durata nu mai
depinde de durata impulsurilor initiale ci de valorile componentelor
de la iesirea
triggerului Schmitt in impulsuri stabile de amplitudine U a caror durata nu mai
depinde de durata impulsurilor initiale ci de valorile componentelor ![]() si
si ![]() .
.
Convertorul
frecventa-tensiune este constituit din circuitul de integrare ![]() la iesirea caruia se
obtine tensiunea continua:
la iesirea caruia se
obtine tensiunea continua:
unde f este frecventa impulsurilor, proportionala cu turatia axului.
Pentru convertirea
tensiunii ![]() intr-o tensiune
standard este suficienta legarea unui amplificator de cc. La bornele
condensatorului
intr-o tensiune
standard este suficienta legarea unui amplificator de cc. La bornele
condensatorului ![]()
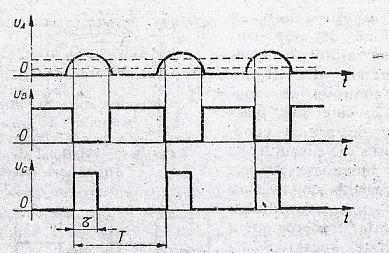
Fig. 8.5. Formele de unda ale tensiunilor in diverse puncte ale traductorului din figura 8.
5.1. Regulatoare electronice pentru reglarea proceselor rapide
Regulatoarele electronice pentru reglarea proceselor rapide trebuie sa fie compatibile cu elementele de executie, in general electrice, specifice acestor procese.
Pentru asigurarea
legilor de reglare ![]() se folosesc aceleasi
scheme electrice ca si in cazul proceselor lente, dar valorile rezistentelor si
condensatoarelor din circuitele de corecutie sunt mai mici deoarece constantele
de timp
se folosesc aceleasi
scheme electrice ca si in cazul proceselor lente, dar valorile rezistentelor si
condensatoarelor din circuitele de corecutie sunt mai mici deoarece constantele
de timp ![]() si
si ![]() din cadrul acestor
legi au valori mai mici.
din cadrul acestor
legi au valori mai mici.
Pentru domeniul actionarilor electrice cu motoarele de c.c. si de c.a. au fost elaborate atat elemente de reglaj automat unificate, cat si regulatoare specializate destinate unor elemente de executie anume.
.
Schema bloc a regulatorului folosit in sistemul unificat UNIDIN proiectat si construit in tara
cuprinde elementul de comparatie format din rezistentele ![]() si
si ![]() , amplificatorul diferential cu o intrare inversoare ( - ) si
una neinversoare ( + ), A, realizat cu tranzistoare cu siliciu si circuitul de
reactie format din impedantele
, amplificatorul diferential cu o intrare inversoare ( - ) si
una neinversoare ( + ), A, realizat cu tranzistoare cu siliciu si circuitul de
reactie format din impedantele ![]() din figura 5.1.
Rezistenta de sarcina
din figura 5.1.
Rezistenta de sarcina ![]() legata la iesirea
regulatorului reprezinta rezistenta de intrare a elementului de executie
comandat. Tensiunile
legata la iesirea
regulatorului reprezinta rezistenta de intrare a elementului de executie
comandat. Tensiunile ![]() si
si ![]() reprezinta semnalul de
referinta
reprezinta semnalul de
referinta ![]() si semnalul
si semnalul ![]() de la iesirea caii de
reactie.
de la iesirea caii de
reactie.
Regulatorul PD care se poate obtine pornind de la schema-bloc din
figura 5.1. este reprezentat in figura 5.2. S-au inlocuit impedantele ![]() si
si ![]() prin cate o rezistenta
iar impedanta
prin cate o rezistenta
iar impedanta ![]() printr-un condensator.
printr-un condensator.
Legea de reglare asigurata de aceasta schema electrica este:
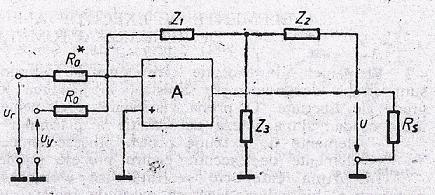
Fig. 5.1. Schema-bloc a regulatorului UNIDIN.
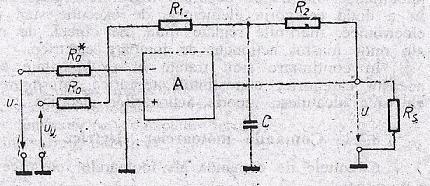
Fig. 5.2. Schema electrica a regulatorului UNIDIN PD.
Pornind de la schema
bloc din figura 8.5.1 se poate realiza un regulator PID inlocuind impedanta ![]() printr-un grup
printr-un grup ![]() legate in serie,
impedanta
legate in serie,
impedanta ![]() prin rezistenta
prin rezistenta ![]() , iar impedanta
, iar impedanta ![]() prin condensatorul
prin condensatorul ![]() . Se obtine astfel schema electrica din figura 5. care
asigura legea de reglare:
. Se obtine astfel schema electrica din figura 5. care
asigura legea de reglare:
![]()
unde: 
Copyright © 2025 - Toate drepturile rezervate