|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
1. Structura sistemelor flexibile de fabricatie: structura, identificare elemente componente.
Un sistem flexibil de fabricatie este ansamblul de masini unelte si dispozitive auxiliare interconectate printr-un sistem comun de transport si un sistem unic de conducere astfel incat sa se poata obtine prelucrarea automata completa a unui tip de piesa, sau sa poata fi realizate simultan diferite operatii de prelucrare asupra unui nr de piese diferite pentru o clasa data.
Fiecare reper prelucrat presupune existenta unui program testat si memorat intr-o unitate centrala care gestioneaza baza de date a sistemului flexibil de fabricatie.
Pentru un sistem flexibil se recomanda:
sa asigura o buna rentabilitate pt prdusele realizate
ansamblurile de complexitate care sunt transferate si prelucrate pe paleti simpli sau speciali sa ramana pe elementele respective pana la aparatul de control
pentru o aceiasi operatie, clasa sculelor, dispozitivelor si verificatoarelor sa corespunda acelorasi standarde.
2. Sitemul robot: configuratie, structura si elemente componente.
Sistemul robot este o structura poliarticulata realizata dintr-o unitate de procesare, un sistem de actionare, o structura mecanica care evolueaza intr-un spatiu de operare.
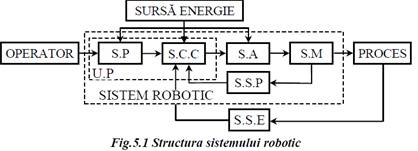
UP - unitatea de prelucrare a informatiei
SP - sistem de programare, asigura comunicatia cu un operator si permite definirea sarcinilor tehnologice pe care robotul trebuie sa le efectueze prin programul de lucru
SCC - sistem de control si comanda care, in urma prelucrarii informatiei furnizate de sistemul senzorial asigura stabilirea legii de comanda si conducerea sistemului de actionare
SA - sistemul de actionare, asigura deplasarea diferitelor articulatii din structura
SSP (sistem senzorial proprioceptiv) si SSE (sistem senzorial exteroceptiv) furnizeaza informatia sub forma logica, analogica sau numerica cu privire la caracteristicile generale ale sistemului
SM - structura manipulatorului
Structura mecanica este realizata din baza robotului, bratul terminal
3. Volumul si spatiul de operare: definire, reprezentare.
Spatiul de lucru reprezinta totalitatea punctelor din spatiu in care trebuie sa se deplaseze terminalul robotului pentru a putea executa functiile tehnologice pentru care a fost programat.
Volumul de lucru este definit ca spatiul fizic in care poate fi pozitionat la un moment dat terninalul robotului, exprimat in unitati de volum.
Pentru asigurarea spatiului de operare, daca nu este egal cu volumul, se recomanda utilizarea diverselor sisteme de locomotie sau diversele modalitati de extindere a posibilitatilor de deplazare liniara, unghiulara de-a lungul axelor de miscare.
4. Structuri de brat: reprezentare si identificare spatiu de operare.
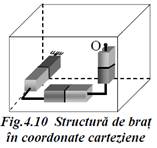 Considerand ca fiecare
element din structura mecanica a bratului are aceiasi dimensiune principala L
si ca fiecare cupla cinematica de translatie realizeaza aceiasi deplasare L pe
cele trei directii.
Considerand ca fiecare
element din structura mecanica a bratului are aceiasi dimensiune principala L
si ca fiecare cupla cinematica de translatie realizeaza aceiasi deplasare L pe
cele trei directii.
- volumul de lucru este un cub de latura L pt TTT
V=L3
- un cilindru gol de inaltime L si raza interioara L si exterioara 2L pt RTT
V=3πL3=9L3
- un cilindru de inaltime L si raza exterioara 2L pt RRT
V=28/3* πL3=29L3
- conturul exterior al unei sfere de raza exterioara 2L pt RRR
V=32/3* πL3=34L3
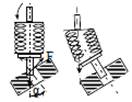
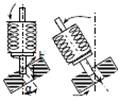
5. Posibilitati de determinare a deplasarilor utilizand traductoarele incrementale de deplasare: schema si principiul de functionare.
Masurarea numerica relativa a deplasarii (masurarea numerica incrementala) presupune generarea de catre traductor a unui impuls numeric, pentru o anumita deplasare efectuata. In functie de numarul impulsurilor generate si cunoscand deplasarea corespunzatoare unui impuls se determina deplasarea totala.
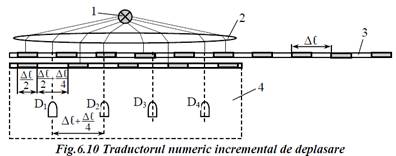
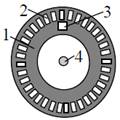 Pe discul 1 alterneaza o
succesiune de suprafete opace si transparente 2, care este legat mecanic de
arborele 4, a carei pozitie se doreste a fi determinata. Pe discul 1 al
traductorului incremental se realizeaza o pista exterioara 2 si una interioara
3. Un fascicol luminos emis de o dioda electroluminiscenta strabate fantele
acestui disc si creaza pe fotodiodele receptoare un semnal analogic. O interfata
electronica amplifica acest semnal, il converteste in impulsuri dreptunghiulare
si il transmite sistemului de prelucrare.
Pe discul 1 alterneaza o
succesiune de suprafete opace si transparente 2, care este legat mecanic de
arborele 4, a carei pozitie se doreste a fi determinata. Pe discul 1 al
traductorului incremental se realizeaza o pista exterioara 2 si una interioara
3. Un fascicol luminos emis de o dioda electroluminiscenta strabate fantele
acestui disc si creaza pe fotodiodele receptoare un semnal analogic. O interfata
electronica amplifica acest semnal, il converteste in impulsuri dreptunghiulare
si il transmite sistemului de prelucrare.
6. Sistemul de conducere ierarhizat: structura, elemente componente.
Structurile de conducere ierarhizate sunt determinate de complexitatea subsistemelor ce intra in componenta structurilor robotice. Organizarea ierarhica a sistemelor de conducere pentru roboti este de tip stiva, fiecare nivel ierarhic subordonand nivelul inferior.
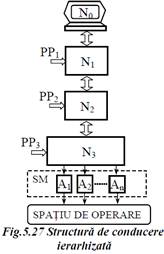 N0 - nivelul operator este nivelul cu prioritate maxima, stabileste
pornirea-oprirea, alegerea unui anumit program de lucru, interventia in caz de
avarii.
N0 - nivelul operator este nivelul cu prioritate maxima, stabileste
pornirea-oprirea, alegerea unui anumit program de lucru, interventia in caz de
avarii.
N1 - nivelul de recunoastere al obiectelor in baza pachetelor de programe proprii PP1, a comenzilor de la nivelul superior si a informatiilor din spatiul de operare, poate determina elementele caracterictice ale obiectului de lucru, obstacolelor in spatiul de lucru, permitand luarea unor decizii adecvate la schimbarea conditiilor de lucru.
N2 - nivelul strategic, care in baza informatiilor de la sistemul proprioceptiv, al comenzilor de la nivelul superior si al pachetelor proprii de programe PP2 se stabileste strategia de ansamblu care se adopta in cadrul sistemului robotic;
N3 - nivelul tactic care in baza informatiilor de la sistemul proprioceptiv, al comenzilor de la nivelul superior, al pachetelor proprii de programe PP3 permite defalcarea strategiei pentru fiecare sistem de actionare in parte (distribuirea miscarilor elementare in miscare pe fiecare grad de libertate).
Ultimul nivel este nivelul executiv care coordoneaza functionarea diverselor sisteme de actionare asociate articulatiilor robotului.
7. Structuri de conducere centralizate: structura, elemente componente.
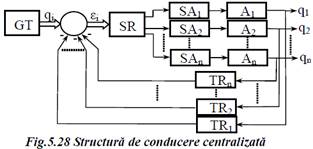
Informatia primita de la un sistem de traductoare TRi este comparata cu valorile prescrise impuse de generatorul de traiectorii GT, eroarea rezultata servind ca o marime de intrare intr-un sistem de reglare SR ce asigura corectarea abaterilor de traiectorie si totodata regimuri tranzitorii si stationare corespunzatoare. SR este uni pentru intreg sistemul de conducere, iesirile acestuia furnizand legile de comanda pentru sistemul de actionare SAi ale fiecarei articulatii Ai din structura mecanica.
8. Controlul cinematic compliant: principiu si exemplificare.
Complianta este determinata de capacitatea robotului de a reactiona prin elementul terminal in functie de fortele exterioare cu care acestea interactioneaza. Complianta are un caracter pasiv atunci cand se utilizeaza structuri mecanice compuse din resoarte, axe si articulatii intr-un sistem de conducere cu structura complianta pasiva nu exista interactiuni intre sistemul de control al robotului si sistemul compliant prin el insusi la asamblare.
In complianta pasiva extremitatea terminalului prin structura mecanica complianta este singura care se modifica pentru a asigura asamblarea corecta si pentru a evita deteriorarea reperelor.
Complianta activa utilizeaza senzori de forta sau/si de cuplu care sa permita interactiunea cu sistemul de conducere al robotului, asigurand comanda miscarii in functie de informatiile primite pe calea de reactie de la senzorii de forta si sau de cuplu. In complianta activa, robotul cu intreaga sa structura se misca.
9. Modele geometrice: sisteme de referinta, definire elemente pentru rotatie si translatie.
Modelul geometric permite descrierea deplasari segmentelor si elementului terminal din structura mecanica a robotului, fara a tine seama de viteza de deplasare si nici de fortele sau cuplurile care determina aceste deplasari. In vederea deducerii modelului geometric al unui robot industrial, se stabilesc sisteme de coordonate legate de fiecare element in parte.
Modelul geometric direct exprima pozitia si orientarea elementului terminal (obiectul manipulat) in spatiul de lucru, cunoscand pozitia si orientarea celorlalte elemente, in functie de parametrii geometrici (coordonatele interne generalizate) ai cuplelor (unghiurile de pozitionare din cuplele de rotatie si pozitia relativa din cuplele de translatie).
Modelul geometric invers permite determinarea coordonatelor interne generalizate qi (vector de dimensiune nx1 ce exprima variabilele articulatiilor θi, di), cand se cunoaste pozitia si orientarea elementului terminal (vectorul de pozitie si matricea de orientare).
Translatiei ii este asociata miscarea liniara, cu simbolul aferent utilizat in reprezentarile cinematice.
Articulatiile de rotatie pot realiza rotatii propriuzise, rasucire sau miscare de revolutie, cu simbolul aferent utilizat in reprezentarile cinematice.
Algoritmul Denavit-Hartenberg: algoritmul si definirea celor 4 parametrii.
Denavit et Hartenberg propun o metoda sintetica de asociere a sistemelor de referinta elementelor componente ale unui lant cinematic, care permit stabilirea transformarilor de trecere intre articulatiile adiacente. Algoritmul se poate aplica lanturilor cinematice deschise, unde fiecare articulatie are un singur grad de libertate (rotatie sau translatie).
Algoritm:
axa zi a sistemului de coordonate, este un vector atasat axei articulatiei li+1, arbitrar orientata, care materializeaza deplasarea axei articulatiei i+1 relativ la axa articulatiei i.
- originea Oi a sistemului de referinta Ri se fixeaza la intersectia perpendicularei comune dintre axele li si l i+1 asociate articulatiilor Ci si Ci+1, situata pe axa articulatiei l i+1.
- axa xi a sistemului de referinta Ri se fixeaza de-a lungul normalei comune axelor li si l i+1 daca exista si orientata de la articulatia Ci spre articulatia C i+1.
- axa yi a sistemului de referinta Ri se alege astfel incat sa completeze sistemul cartezian
Pozitia si orientarea unui element de indice i, in raport cu elementul de indice i-1 sunt definite de parametri Danavit-Hartenberg:
ai reprezinta distanta de la intersectia axei zi-1 cu axa xi la originea Oi masurata de-a lungul axei xi (sau distanta cea mai mica dintre axele zi-1 si zi);
di este distanta de la originea Oi-1 la intersectia axei zi-1 cu axa xi, masurata de-a lungul axei zi-1 (distanta algebrica dintre axele xi-1 si xi masurata pe zi-1);
αi reprezinta unghiul dintre axele zi-1 si zi, facut prin rotire in jurul axei xi in sens trigonometric (unghiul de rotatie in jurul axei xi pentru a suprapune vectorul zi-1 peste vectorul zi) :
θi este unghiul articulatiei de la axa xi-1 la axa xi, m_surat in sens trigonometric, in jurul axei zi-1
Copyright © 2025 - Toate drepturile rezervate