|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
REGULATOARE ANALOGICE
1. OBIECTIVUL LUCRARII
cunoasterea rolului si locului regulatorului in cadrul unui sistem de reglare automata ;
familiarizarea cu principalele tipuri de regulatoare intalnite in practica : electonice si pneumatice, unificate si specializate, continue (analogice) si discontinue (bipozitionale, tripozitionale, numerice) ;
cunoasterea principiului de functionare al regulatoarelor uzuale ;
cunoasterea fizica a elementelor componente ale regulatoarelor electronice si pneumatice ;
insusirea tehnicii de manipulare a regulatoarelor uzuale ;
intelegerea si interpretarea corecta a raspunsului in timp al regulatoarelor de tip P, PI, PD, PID .
2. NOTIUNI RECAPITULATIVE DE BAZA
2.1. REGULATOARE ANALOGICE UZUALE
Regulatorul este dispozitivul de comanda al unui SRA, avand rolul de a genera semnalul de comanda pentru dispozitivul de executie, prin prelucrarea corespunzatoare a informatiei primite de la dispozitivul de masurare, referitoare la valoarea curenta a marimii reglate.
Principial, regulatorul contine doua blocuri mai importante (fig.1):
elementul de comparatie EC, care compara semnalul de reactie xr cu semnalul de referinta xi, generand abaterea xa=xi - xr ;
blocul de calcul BC, care genereaza comanda automata xca , ca rezultat al prelucrarii abaterii xa dupa un anumit algoritm prestabilit.
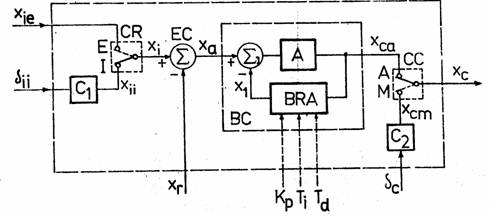
Fig.1. Schema de principiu a unui regulator.
In cazul regulatoarelor de tip PID, comanda se obtine prin multiplicarea, integrarea si derivarea abaterii :
![]() ,
,
unde Kp este factorul de proportionalitate, Ti constanta de integrare, Td constanta de derivare.
In cazurile particulare Ti = ∞ , respectiv Td = 0 , algoritmul de comanda PID devine PD, respectiv PI.
La regulatoarele electronice cu componente discrete si la regulatoarele pneumatice, blocul de calcul BC are o structura inchisa, fiind format dintr-un element de comparatie ∑1, un simplificator A cu factor de amplificare mare si un bloc de reactie acordabil BRA, prevazut cu comutatoare pentru modificarea convenabila a celor trei parametrii de acordare.
Notand cu K factorul de amplificare al amplificatorului A si cu Yr(s) functia de transfer a blocului de reactie acordabil BRC, blocul de calcul BC va avea functia de transfer :
![]()
Deoarece K >>1, rezulta :
![]()
 ,
,
relatie ce evidentieaza rolul si importanta blocului
de reactie acordabil BRC in stabilirea algoritmului de comanda .
In cazul regulatoarelor de tip PID, blocul de calcul are functia de transfer:
![]() .
.
In practica, in locul factorului de proportionalitate Kp se utilizeaza
frecvent banda de proportionalitate Bp , un parametru de
acordare invers proportional cu Kp si este exprimat in procente :![]() .
.
In functie de pozitia comutatorului de referinta CR, regulatorul poate functiona cu referinta interna (xii), sau cu referinta externa (xie). Referinta interna poate fi stabilita la valoarea dorita prin modificarea pozitiei δii a unui cursor amplasat, de obicei , pe fata frontala a regulatorului.
In functie de pozitia comutatorului de comanda CC, regulatorul functionea-za in regim AUTOMAT, sau in regim MANUAL. In primul caz comanda este obtinta prin prelucrarea abaterii xa dupa legea (1), iar in al doilea caz, comanda este proportionala cu pozitia δc a unui buton de comanda manuala, amplasat pe fata frontalaa regulatorului.
In afara celor doua comutatoare, mai exista un comutator DIRECT-INVERS pentru stabilirea sensului corect de variatie a comenzii xc in raport cu reactia xr (Kp<0 pentru sens DIRECT, Kp>0 pentru sens INVERS).
In regim manual, semnalul de comandǎ poate fi modificat in sens crescǎtor, respectiv descrescǎtor, prin apǎsarea unuia dintre cele douǎ butoane cu autorevenire situate la partea inferioarǎ a panoului frontal, sub scala indicatoare a semnslului de comandǎ (fig.2) . Cu ajutorul comutatoarelor A-M si I-E poate fi stabilit regimul de lucru automat sau manual, respectiv de referintǎ internǎ sau externǎ . Butoanele de echilibrare "ech" si "x 10"sunt utilizate in cadrul operatiei de conectare, fǎrǎ soc, a referintei interne in locul celei externe, sau invers.
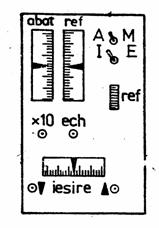
Fig. 2. Panoul frontal al regulatorului ELC 1132.
In tabelul 1 sunt prezentate domeniile in care pot fi modificati de parametrii de acordare ai regulatoarelor din clasa ELC 1130 .
Tabelul 1
|
Parametru |
Domeniu de variatie |
|
Bp | |
|
Ti |
1.02000 sec |
|
Td |
0.6600 sec |
Pentru realizarea algoritmului de comanda PID, regulatoare electronice integrate contin circuite de insumare, de comparare, de integrare si de derivare. Regulatorele ELC 1130 functioneaza de regula cu semnal unificat 4..20 mA. Prin conectarea unor rezistente de 250 Ω intre bornele de intrare, curentul de referintǎ si curentul de reactie sunt convertiti in tensiuni in gama 1..5 V. Daca semnalele de referinta si de reactie sunt curenti in gama 2..10 mA, atunci rezistentele conectate la bornele de intrare trebuie sa fie de 500 Ω. Semnalul de comanda de la iesirea regulatorului este generat totdeauna de un etaj final de putere.
CONTINUTUL SI DESFASURAREA LUCRARII DE LABORATOR
Lucrarea va fi efectuata etapizat, pe baza punctelor prezentate in cele ce urmeaza.
3.1. Identificarea tuturor tipurilor de regulatoare din dotarea laboratorului (electronice si pneumatice, unificate si specializate, continue si bipozitionale) si punerea in evidenta a elementelor principale ale acestora.
3.2. Programarea algoritmului de reglare la regulatorul electronic ELC 1132. Cu regulatorul nealimentat, se vor programa, sub supravegherea cadrului didactic, urmatorii algoritmi :
a.) P : Bp=100%
b.) PI : Bp=200% , Ti=10s
c.) PD : Kp=5 , Td=20s
d.)PID : Bp=50% , Ti=30s , Td=10s
Kp=10 , Ti=2min , Td=1min .
Pentru fiecare caz in parte se vor scrie ecuatiile si functiile de transfer corespunzatoare canalelor xi-xc si xr-xc .
3.3. Experimentarea in regim MANUAL a regulatorului ELC 1132 .
Cu regulatorul in regim MANUAL (comutatorul A-M in pozitie M), se alimenteaza cu energie panoul cu aparatele utilizate la studiul regulatorului electronic cu circuite integrate ELC 1132 (fig. 3).
Modificarea manuala a semnalului de comanda rc (curent in gama 4..20 mA) se face prin apasarea unuia dintre butoanele cu autorevenire situate la partea inferioara a panoului frontal. Variatia semnalului de comanda xc de la iesirea regulatorului va fi urmarita procentual pe scala orizontala a regulatorului si la aparatul inregistrator de tip I potentiometru automat.
Prin apasarea butonului de comanda manuala din dreapta (stanga) panoului frontal al regulatorului se obtine o crestere (scadere) a semnalului de comanda, cu viteza constanta. O aseamenea variatie a comenzii este realizata prin integrarea in timp a unui semnal constant pozitiv, respectiv negativ.
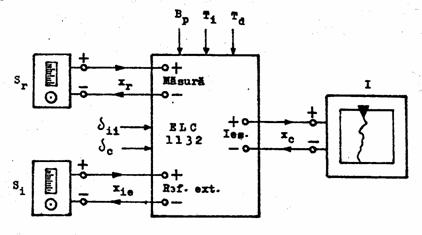
Fig. 3. Stand pentru studiul regulatorului ELC 1132.
3.4. Determinarea caracteristicilor statice xc=f(xr) ale regulatorului de tip proportional.
Se scrie mai intai expresia caracteristicii statice a unui regulator proportional sub forma xc=axr+b , evidentiindu-se dependenta constantelor a si b de xio si xco .
Cu regulatorul nealimentat, se elimina componenta derivatoare prin extragerea fisei modului D si se reduce efctul componentei integratoare prin introducerea fisei modulului I in pozitia "x10" si aducerea butonului constantei Ti la valoarea maxima. Se alimenteaza regulatorul, in regim manual, si se stabileste semnalul de comanda la o anumita valoare xco (de exemplu 50%). Se verifica daca regulatorul este conectat pe referinta interna (comutatorul I-E in pozitia I), apoi se fixeaza aceeasi valoare (de exemplu, 60%) pentru referinta si reactie. Se trece regulatorul pe AUTOMAT si se modifica semnalul de reactie xr de-o parte si de alta a valorii initiale, determinandu-se astfel cca. 8-10 puncte ale caracteristicii statice. Operatia va fi efectuata pentru doua valori ale factorului de proportionalitate, de exemplu pentru Kp=1 si Kp=2, apoi se schimba pozitia comutatorului DIRECT-INVERS si se repeta experimentul.
Datele obtinute vor fi centralizate in 4 tabele de tipul celui de mai jos :
|
xr[%] |
| |||
|
xc[%] |
Unul dintre cele 4 tabele va fi completat cu inca doua linii in care se vor trece valorile in mA ale semnalelor xc si xr , tinandu-se seama de faptul ca intrarile xi si xr varieaza in gama 2..10 mA, iar iesirea xc in gama 4..20 mA.
Cele patru caracteristice statice vor fi trasate grafic pe hartie milimetrica, in acelasi sistem de coordonate. Se vor face aprecieri asupra liniaritatii caracteristicilor determinate experimental si asupra valorilor reale ale factorului de proportionalitate.
3.5. Analiza componentei integratoare in regim stationar
Cu regulatorul nealimentat, se introduce fisa modului I in pozitia "x1". Se alimenteaza regulatorul, se stabileste xc la 50% , se stabilesc xi si xr astfel incat xa=xi-xr=10% , se fixeaza Kp la valoarea 1 si Ti la o anumita valoare (de exemplu, 25s), dupa care se trece regulatorul pe AUTOMAT si se urmareste la inregistrator variatia in timp a semnalului de comanda. Cu ajutorul unui cronometru se determina viteza de variatie a semnalului de comanda xc (exprimata in % / s) si se compara cu expresia teoretica Kpxa / Ti (xa constant). Cand xc iese in afara domeniilor de lucru se trece regulatorul pe MANUAL si se readuce xc la valoarea xco=50%.
Se repeta experimentul pentru alta valoare a constantei de integrare Ti, apoi pentru xa=10%. Se fac aprecieri si se interpreteza valorile obtinute.
3.6. Schimbarea referintei regulatorului
Cu regulatorul nealimentat, se introduce fisa modulului D in pozitia "x1". Dupa alimentarea regulatorului, se stabileste manual xc la o valoare intermadiara din domeniu, se asigura xa=0, apoi se trece regulatorul in regim AUTOMAT.
Pentru schimbarea corecta (fara soc) a referintei interne cu referinta externa, in conditiile in care nu este posibila masurarea precisa a acesteia din urma, se utilizeaza butonul "echilibrare". Prin mentinerea apasata a acestui buton, scala verticala din stanga panoului frontal al regulatorului nu va mai indica abaterea xa=xi-xr , ci diferenta dintre referinta interna si cea externa. Asadar, in vederea trecerii regulatorului pe referinta externa, se apasa butonul de "echilibrare" si se modifica referinta externa pana cand acul indicator al scalei abaterii indica zero. Dupa eliberarea butonului de echilibrare se trece comutatorul referintelor I-E in pozitia E. Se observa ca abaterea xa=xi-xr ramane zero, iar semnalul de comanda xc ramane neschimbat.
Trecerea inversa, de pe referinta externa pe cea interna, se efectueaza similar, cu deosebirea ca de data aceasta se modifica referinta interna pentru a fi adusa la valoarea referintei externe.
In continuare, pentru comparatie se va modifica una dintre referinte si se va efectua comutarea referintelor, renuntandu-se la operatia de echilibrare. Efectul comutarii asupra semnalului de comanda va fi consemnat in referat.
Cu ajutorul butonului "x10" poate fi obtinuta o crestere de cca.10 ori a sensibilitatii aparatului care indica abaterea intre cele doua referinte.
3.7. Determinarea caracteristicilor dinamice ale regulatorului
Vor fi determinate experimental formele de variatie in timp ale marimii de comanda xc(t) la o variatie de tip treapta a marimii de reactie xr , in cazul regulatoarelor de tip P, PI, PD, PID. Pentru fiecare caz in parte se va proceda dupa modelul prezentat in continuare.
Cu regulatorul nealimentat, se stabileste structura dorita a acestuia si se fixeaza parametrii de acordare la valorile dorite. Dupa alimentare, se stabileste manual xc la valoarea xco =20% , se fixeaza xi si xr la aceeasi valoare (de exemplu, 50%), se trece comutatorul DIRECT-INVERS pe pozitia DIRECT, apoi se comuta regulatorul pe AUTOMAT. Se modifica brusc xr , in sens crescator, cu 10% si se urmareste cu mare atentie modul de variatie in timp a marimii de comanda xc , dupa care se traseaza grafic, calitativ, dependenta lui xc de t.
Pentru cntinuarea experimentului, se trece regulatorul in regim MANUAL, se fixeaza xc la 20% , se readuce xr la valoarea lui xi (xa=0), se modifica convenabil algoritmul de comanda, se trece regulatorul pe AUTOMAT si se modifica xr sub forma de treapta.
Pe baza caracteristicilor dinamice reprezentate grafic se vor formula concluzii privind :
modul in care fiecare parametru de acordare influenteaza intensitatea comenzii ;
ordinea temporala in care se manifesta preponderent fiecare dintre componentele proportionala, integratoare si derivatoare in cazul regulatoarelor de tip PI, PD, PID ;
asemanarile si deosebirile intre caracteristicile dinamice reale (determinate experimental) si cele ideale (determinate prin calcul pe baza modelului matematic (1)) ;
rolul, avantajele si dezavantajele fiecarei componente (P, I, D) in procesul efectiv de reglare.
INTREBARI DE CONTROL
1. Care este rolul regulatorului in cadrul unui SRA?
2. Scrieti ecuatia caracteristicii statice a unui regulator de tip proportional, stiind ca xi, xr, xc sunt curenti in gama 4 . 20 mA, xi =10 mA, xc0=60%, Bp=50%.
Copyright © 2026 - Toate drepturile rezervate