|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
OWI 9874 - Robot cu comanda
Oamenii primesc informatii din mediul inconjurator prin intermediul organelor de simt(ochi,urechi) iar creierul prelucreaza aceste date pentru a trimite comenzi la muschii membrelor sau diferite alte organe.
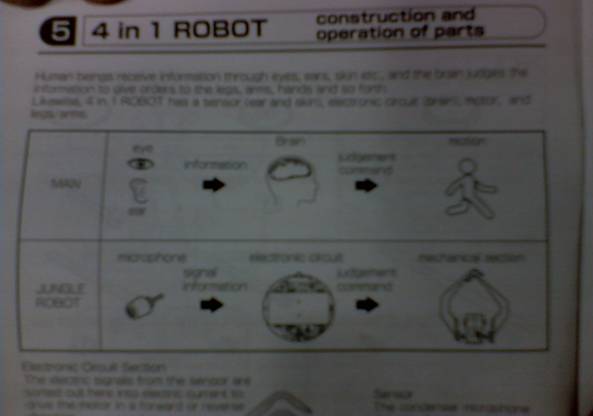
OWI 9874 foloseste acelasi "algoritm" de functionare.Diferite componente preiau informatii,le prelucreaza si comanda partile mecanice(corespondentii muschilor si membrelor umane).
Vom trata pe rand etajele care intra in componenta robotului.
OWI 9874 "aude".Capacitatea aceasta il face sa raspunda la comenzi sonore, zgomote,prin miscare.Urechea lui o reprezinta microfonul.
Microfonul capacitiv:

Microfonul capacitiv poate introduce variatii de tensiune intr-un circuit. Membrana lui este de fapt una din cele doua placi ale unui condensator, incarcat la o anumita tensiune.
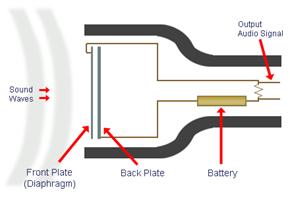
Variatiile
de presiune la care aceasta este supusa in momentul producerii unui sunet o fac
sa se miste,modificandu-se distanta dintre placi ,ceea
ce se traduce intr-o intr-o valoare diferita a capacitatii si respectiv a
tensiunii la borne(avand in vedere faptul ca sarcina de pe placi are valoare
C=![]() -"d" scade cand este lovita de o masa de aer cu presiune ridicata
-"d" scade cand este lovita de o masa de aer cu presiune ridicata
-"d" creste cand este lovita de o masa de aer cu presiune scazuta
C=![]() la Q constant U la
borne va scadea sau va creste in functie de "d"
la Q constant U la
borne va scadea sau va creste in functie de "d"
 Variatia de tensiune(mai mare de
0.67V) polarizeaza direct jonctiunea Baza-Emitor a unui tranzistor NPN si
inchide circuitul.Ceea ce urmeaza este un circuit de temporizare cu rolul de a
a tine motorul robotului in functiune o anumita perioada de timp(10 secunde din
masuratorile noastre,valoare care probabil se poate schimba prin modificarea
valorilor unor rezistoare din circuit).
Variatia de tensiune(mai mare de
0.67V) polarizeaza direct jonctiunea Baza-Emitor a unui tranzistor NPN si
inchide circuitul.Ceea ce urmeaza este un circuit de temporizare cu rolul de a
a tine motorul robotului in functiune o anumita perioada de timp(10 secunde din
masuratorile noastre,valoare care probabil se poate schimba prin modificarea
valorilor unor rezistoare din circuit).
REOSTAT![]()
![]()
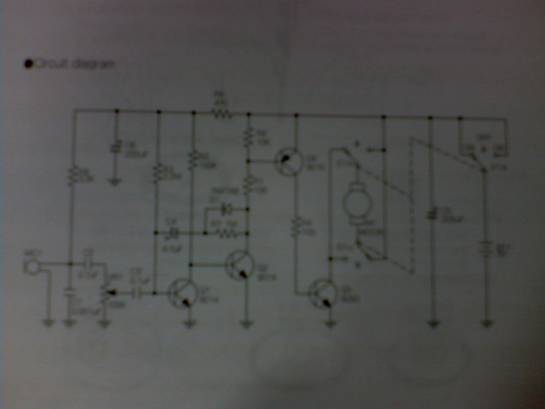
Reostatul conectat la Baza tranzistorului modifica sensibilitatea la zgomot a robotului.

O cadere mare de tensiune pe reostat implica o tensiune la bornele tranzistorului prea mica pentru a-l activa,de aici nevoia unui sunet mai intens care sa puna robotul in miscare.
Motorul alimentat de acest circuit,la o tensiune de aproximativ 3V,reprezinta muschii robotului.El transforma energia electrica in energie mecanica.


Motorul este alcatuit dintr-o serie de bobine care se invart in camp magnetic atunci cand sunt strabatute de un curent electric.
 Polaritatea la bornele lui se poate inversa
cu ajutorul intrerupatorului. Robotul va merge in acest fel cu spatele.
Polaritatea la bornele lui se poate inversa
cu ajutorul intrerupatorului. Robotul va merge in acest fel cu spatele.

Pentru
ca robotul sa "paseasca",miscarea circulara a axului
motorului trebuie transformata in miscare rectilinie,nu inainte de a se reduce
turatia componentelor aflate in miscare.Aceasta se face prin intermediul unui
sistem de pinioane(reductor) legat la axul rotorului.4 pinioane cu dinti putini
invart 4 pinioane de diametru mai mare,viteza de rotatie scazand de ![]() ori(n2=nr. de dinti al pinionului mai mare,n1=nr.de dinti al
pinionului mic).
ori(n2=nr. de dinti al pinionului mai mare,n1=nr.de dinti al
pinionului mic).

Pinioanele
sunt identice ca numar de dinti si dupa un calcul simplu putem deduce ca
turatia scade de 64 de ori,valoare cat se poate de adevarata.(putem considera
turatia motorului 3000rpm,![]() rotatii pe
minut,traduse in niste pasi destul de alerti ai robotului).
rotatii pe
minut,traduse in niste pasi destul de alerti ai robotului).
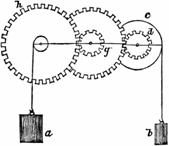
Momentul fortei va creste considerabil (raportul supraunitar dintre numarul de dinti este sinonim cu o crestere a bratului fortei) si ii va oferi robotului capacitatea de a se misca fara ca motorul sa se blocheze,sa consume prea mult,sau chiar sa fie nevoie de un motor mai puternic.
Miscarea de translatie se obtine prin atasarea la axul motor a doua biele,care poti fi conectate la o varietate de membre.

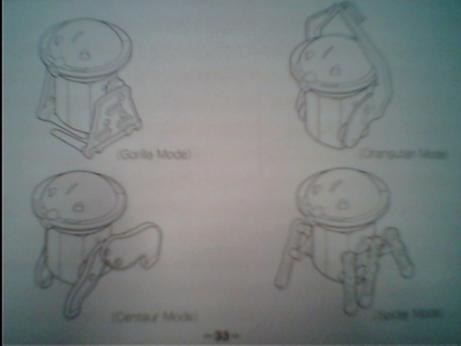
Denumit si "Fiara" acest robot imita tipurile de mers a 4 animale din "jungla".
Ø Tipul Centaur
Ø Tipul Urangutan
Ø Tipul Gorila
Ø Tipul Paianjen
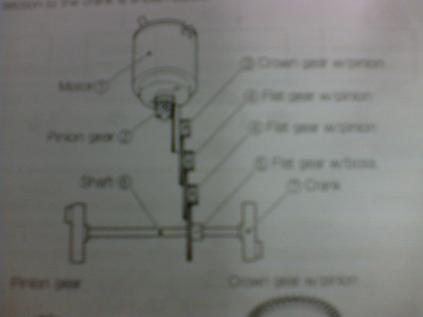
Vom explica in continuare modul de asamblare al lui OWI 9874
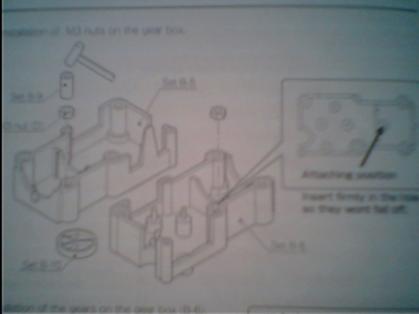
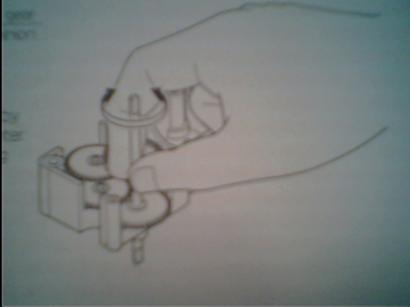
Ø Se ansambleaza axul in angrenaj ca in imagine

Ø Apoi piulitele se pun in locurile special destinate acestora ca in imaginea alaturata
Ø Se monteaza rotile dintate(pinioanele) in ordinea urmatoare:
Ø
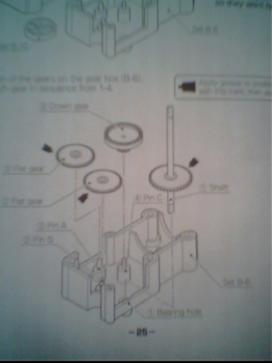
Ø Se monteaza angrenajul montat la pasul 2
![]() Trebuie sa avem grija ca pinioanele sa fie puse corect in asa fel
incat robotul sa poata functiona normal.
Trebuie sa avem grija ca pinioanele sa fie puse corect in asa fel
incat robotul sa poata functiona normal.
![]()
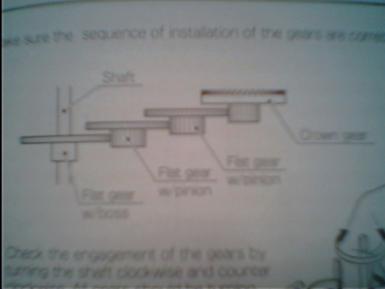
![]() Invartim manual angrenajul pentru a ne asigura ca
functioneaza normal.
Invartim manual angrenajul pentru a ne asigura ca
functioneaza normal.
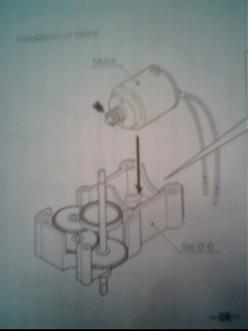
Ø Montam motorul pe sasiul robotului in locul special(motorul trebuie securizat cu ajutorul fiselor B-5 si B-6).

Ø Se fixeaza cealalta jumatate a sasiului cu ajutorul suruburilor M3X34 si a piulitelor M3.
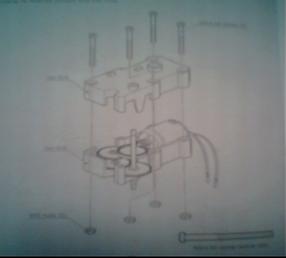

Ø Apoi sunt montate cele doua jumatati ale corpului robotului pe sasiul deja ansamblat cu ajutorul unui surub M3X40 si a unei piulite M3.
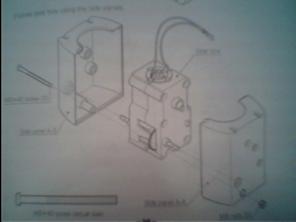
Ø Se monteaza capul robotelului pe corpul acestuia cu ajutorul a 4 suruburi M3X8.


Ø Legam microfonul si intrerupatorul de computer.
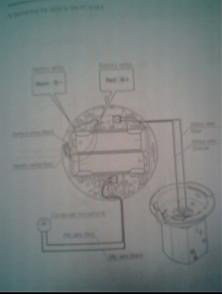

Ø Legam bornele motorului in locul special de pe placa computerului.
Ø Montam computerul de "capul robotului"cu grija si apoi il fixam cu
ajutorul a 3 suruburi M2.6X6.
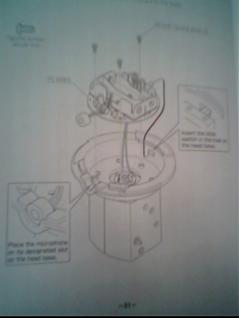

Ø Punem capacul in partea superioara a "capului" robotului.
![]() Acum robotul este pregatit pentru a-i atasa dupa dorinta cele patru
tipuri de membre.
Acum robotul este pregatit pentru a-i atasa dupa dorinta cele patru
tipuri de membre.


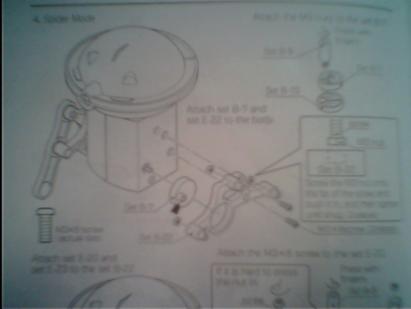
![]() Se monteaza componentele
bratelor.Avem nevoie de 2 suruburi M3X8 pentru fiecare brat si cate un Set B-7 si Set B-11.
Se monteaza componentele
bratelor.Avem nevoie de 2 suruburi M3X8 pentru fiecare brat si cate un Set B-7 si Set B-11.


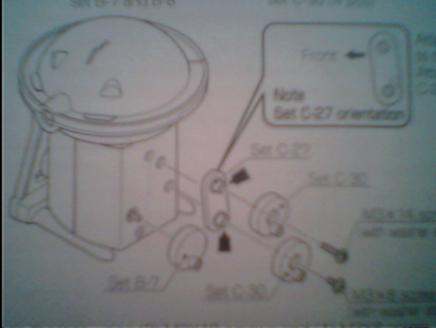
![]() Se monteaza componenta
Set C-27 cu orientarea respectiva apoi componentele set C-30 si componenta set
B-7 cu ajutorul suruburilor M3X8 si M3X14.
Se monteaza componenta
Set C-27 cu orientarea respectiva apoi componentele set C-30 si componenta set
B-7 cu ajutorul suruburilor M3X8 si M3X14.
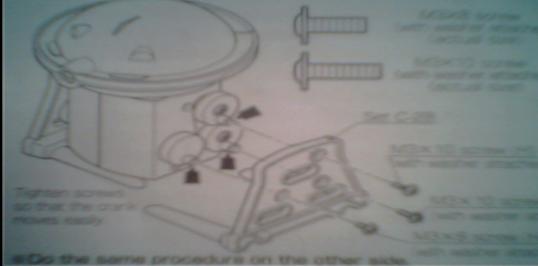
![]() Se monteaza componenta
Set C-28 cu ajutorul suruburilor M3X10 si M3X8.
Se monteaza componenta
Set C-28 cu ajutorul suruburilor M3X10 si M3X8.

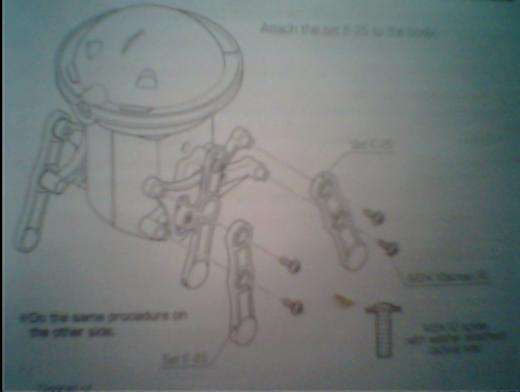
![]() Se monteaza componentele
ca in schema alaturata si se ataseaza corpului robotelului.
Se monteaza componentele
ca in schema alaturata si se ataseaza corpului robotelului.
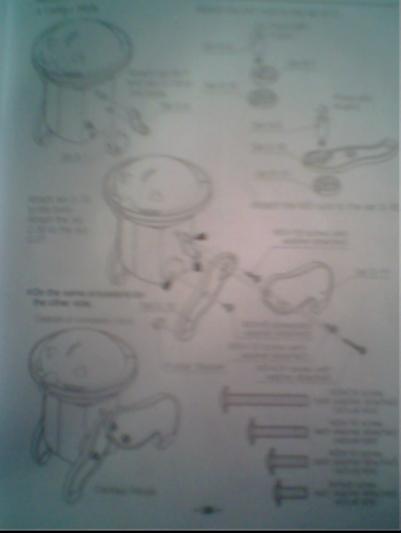
![]() Se monteaza componentele
ca in schema alaturata si se ataseaza corpului robotelului.
Se monteaza componentele
ca in schema alaturata si se ataseaza corpului robotelului.

Concluzii:
Ø Robotica are viitor stralucit intrucat robotii incep sa capete din ce in ce mai multe functii si devin mai inteligenti.Micul OWI 9874 este doar un copil pe langa robotii din industrie sau alte domenii alte stiintei dar ne arata punctul de la care s-a plecat.
Ø In materie de locomotie putem spune ca unul din exemplarele aflate in varful piramidei este Phoenix,un hexapod ale carui miscari sunt de o naturalete iesita din comun.

Realizatori:
Copyright © 2026 - Toate drepturile rezervate