|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
Compensatoarele si puntile de masurare
sunt aparatele de masurare cu utilizari foarte largi.
COMPENSATOARE sI PUNtI DE MaSURARE
Compensatoarele electrice servesc, in principal, la masurarea tensiunii electrice, dar prin intermediul acestei marimi se poate masura oricare alta marime convertita in prealabil in tensiune.
La baza conceptiei si functionarii acestor aparate sta principiul compararii si echilibrarii unei tensiuni necunoscute cu o tensiune cunoscuta si reglabila furnizata de o sursa adecvata. La echilibru, cand cele doua tensiuni sunt egale, tensiunea necunoscuta se determina dupa tensiunea cunoscuta.
Elementele esentiale ale unui compensator sunt urmatoarele:
- sursa de tensiune pentru alimentare;
- divizorul de tensiune;
- indicatorul de echilibru sau dispozitivul de echilibrare automata;
- eventual o sursa de tensiune etalon, pentru calibrare.
Aceste aparate acopera un domeniu foarte larg de tensiuni si precizii, erorile relative ale acestora putand fi coborate pana la 0,001% in cazul masurarii tensiunii continue si pana la 0,01% - in cazul tensiunii alternative.
Pe acest principiu pot fi concepute si compensatoare pneumatice, compensatoare hidraulice, compensatoare mecanice s.a.
1. COMPENSATOARE ANALOGICE DE TENSIUNE CONTINUa
1.1. Scheme de principiu
Scheme Poggendorf. Compararea si echilibrarea tensiunilor se poate face in mai multe feluri. In figura 1,a se arata schema compensatorului Poggendorf. El este alcatuit dintr-un divizor de tensiune rezistiv (reostat) cu contact mobil, alimentat de la sursa de tensiune U si dintr-un indicator de echilibru IE, care poate fi un galvanometru de zero.
Tensiunea prelevata de pe divizor este:
![]() (1)
(1)
si se determina dupa pozitia cursorului fata de rezistoul R si fata de scala S, k fiind factorul de divizare subunitar r / R.
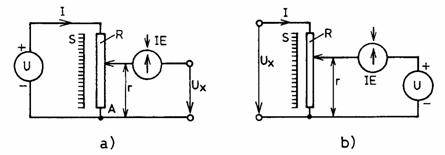
Fig.1. Scheme de principiu ale compensatorului Poggendorf:
a) pentru Ux < U; b) pentru Ux > U.
Pentru
o anumita pozitie a cursorului, tensiunea necunoscuta (de
masurat) Ux devine
practic egala cu tensiunea cunoscuta Uc , egalitatea fiind sesizata de IE
prin absenta curentului. In aceasta
situatie de echilibru:![]()
![]() (2)
(2)
unde e este limita (pragul) de insensibilitate a indicatorului
de echilibru. Daca e![]() 0, Ux kU
0, Ux kU
De remarcat ca la echilibru curentul din circuitul care furnizeaza tensiunea Ux este nul, de unde rezulta ca in acest mod se masoara tensiunea de mers in gol.
Echilibrarea celor doua tensiuni se poate face de catre un operator uman sau de catre un dispozitiv de echilibrare automata.
Cu schema din figura 1,a se pot masura tensiuni Ux < U. Cu schema din figura 1,b se pot masura tensiuni Ux > U. In acest din urma caz, in momentul echilibrarii celor doua tensiuni, in circuitul care furnizeaza tensiunea Ux exista un curent care poate introduce erori de masurare determinate de caderea de tensiune pe rezistenta interna a sursei tensiunii Ux. Pentru a limita aceste erori este necesar ca valoarea rezistentei R sa fie mare.
Schema Lindeck-Rothe. In figura 2 se prezinta schema compensatorului Lindeck-Rothe, alcatuit din reostatul Ra, miliampermetrul mA, rezistorul etalon Re si din indicatorul de echilibru IE.
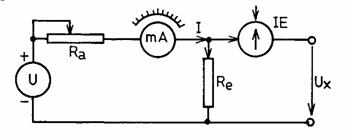
Fig.2. Schema de principiu a compensatorului Lindeck-Rhote.
In cazul acestei scheme, tensiunea necunoscuta Ux se compara cu caderea de tensiune pe rezistorul etalon, cadere de tensiune ce poate fi modificata prin modificarea rezistentei Ra. Prin urmare tensiunea cunoscuta in acest caz este:
![]() (3)
(3)
Curentul I este pus in evidenta de un miliampermetru a carui scala poate fi gradata in unitati de tensiune.
Acest tip de compensator are o precizie determinata in principal de precizia miliamermetrului si in general aceasta este mai mica decat precizia compensatorului Poggendorf.
Compensator de curent. in figura 3 este prezentata schema unui compensator cu care se poate masura curentul electric fara consum de putere, adica fara cadere de tensiune. Aceasta schema se aseamana cu schema Lindeck-Rothe, cu deosebirea ca are in plus un rezistor de precizie cu rezistenta constanta R.
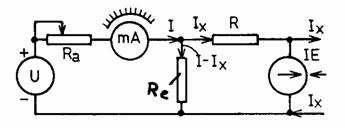
Fig.3. Schema de principiu a compensatorului de curent.
Pentru masurare, rezistenta Ra se modifica astfel ca IE sa indice zero. In acel moment tensiunea la bornele IE fiind nula, rezulta ca pe rezistoarele R si Re au loc caderi de tensiune egale si opuse, prin urmare:
![]() . (4)
. (4)
Schemele prezentate mai sus
prezinta inconvenientul ca sursa de tensiune U trebuie sa furnizeze in permanenta o tensiune
riguros
Acest inconvenient poate fi ocolit daca se adopta o schema de masurare bazata pe metoda substitutiei dezvoltata in mai multe variante.
1.2. Scheme tehnice evoluate
Varianta cu substitutie este prezentata in figura 4,a. in afara de elementele din figura 1, in varianta cu substitutie mai exista si o sursa de tensiune etalon necesara etalonarii curentului din circuitul de comparatie si un comutator K.
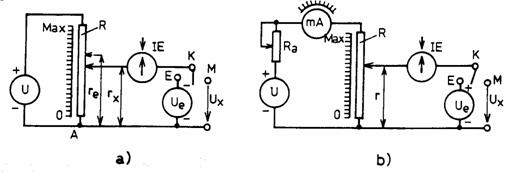
Fig.4. Compensator Poggendorf cu etalonare prin substitutie:
a) etalonare cu orice curent; b) etalonare cu un curent constant cunoscut.
Masurarea in acest caz se face in doua etape: etapa de etalonare si etapa de masurare propriu-zisa. In etapa de etalonare, comutatorul K se pune pe pozitia E. In aceasta etapa tensiunea etalon este pusa in opozitie cu tensiunea culeasa de pe reostatul R. Modificand corespunzator pozitia cursorului pe reostatul R se ajunge la o echilibrare a tensiunilor cand:
![]() (5)
(5)
In etapa de masurare, comutatorul k se trece pe pozitia M si se face echilibrarea tensiunii Ux cu o tensiune culeasa de pe reostatul R. Echilibrarea se face la o alta valoare a rezistentei si anume la valoarea rx pentru care:
![]() (6)
(6)
Curentul fiind acelasi in ambele etape rezulta ca:
![]()
Precizia masurarii este determinata de precizia cu care se cunosc marimile Ue, re si rx, neexistand restrictii privind curentul I din circuit.
Varianta cu substitutie si tarare. Desi compensatorul poate functiona cu orice curent I, in practica se prefera ca acest curent sa fie stabilizat la o valoare optima si comoda pentru calcule si anume I = 10-2, 10-3 sau 10-4 A. Fixarea si stabilizarea curentului la una din aceste valori se numeste tarare si se realizeaza intr-o schema ca cea din figura 4,b, in felul urmator:
Pentru I = 10-3 A, spre exemplu, se fixeaza cursorul in pozitia pentru care re = 103 Ue (I = Ue / re = 10-3 A). Se pune comutatorul K pe pozitia E si se actioneaza asupra reostatului Ra astfel incat indicatorul de echilibru sa indice zero. In aceasta situatie:
![]() (8)
(8)
Pentru masurare, comutatorul K se pune pe pozitia M si se cauta o noua pozitie a cursorului reostatului R, pentru care IE sa indice zero. In aceasta situatie:
![]() (9)
(9)
Tararea sau retararea se face la intervale de timp destul de mari pe cand masurarea se face in mod continuu sau foarte des.
Pentru usurarea echilibrarii celor doua tensiuni si pentru marirea finetei acesteia, in loc de un singur reostat Ra se folosesc doua sau chiar trei reostate inseriate: unul pentru reglaj grosier, unul pentru reglaj fin si eventual, unul pentru reglaj mediu.
Etalonarea cu circuit separat. In schemele din figura 4 etalonarea, tararea si masurarea se fac folosind acelasi circuit. La intervale mari de timp curentul I tarat ar putea suferi modificari din cauza sursei U, prin urmare el trebuie retarat. Retararea se poate face folosind acelasi circuit si pentru retarare si pentru masurare sau folosind circuite separate pentru aceste operatii asa cum se vede in figura 5.
Schema din figura 5 permite si realizarea unei corectii de temperatura prin intermediul reostatului RT care urmeaza sa fie pozitionat pe valoarea temperaturii mediului ambiant.
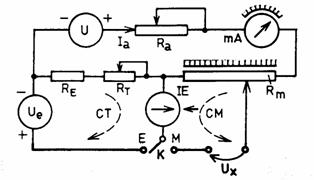
Fig.5. Compensator cu circuit de etalonare separat.
1.3. compensatoare cu echilibrare automata
Caracteristic pentru aceste compensatoare este faptul ca echilibrarea tensiunii de masurat Ux cu tensiunea etalon Uc se realizeaza automat, cu ajutorul unui dispozitiv de echilibrare automata, DEA. Acesta este incadrat intr-un sistem de reglare inchis, cu actiune dupa abatere, in care tensiunea etalon, prelevata de pe rezistorul R, este astfel modificata incat sa fie cat mai apropiata de Ux.
Compensatoarele cu echilibrare automata asigura performante superioare in ceea ce priveste viteza de masurare, datorita echilibrarii mai rapide a celor doua tensiuni, precum si in ceea ce priveste reproductibilitatea. Ele pot asigura, de asemenea, sensibilitate si precizie dupa dorinta.
Dupa modul in care face echilibrarea deosebim:
- compensatoare cu DEA de tip proportional;
- compensatoare cu DEA de tip integrator.
In primul caz actiunea de compensare este proportionala si de acelasi semn cu tensiunea de dezechilibru DU dintre tensiunile Ux si Uc, pe cand in al doilea caz actiunea este proportionala cu integrala in timp a tensiunii de dezechilibru.
Compensatoarele de tip proportional actioneaza mai rapid insa nu asigura echilibrarea totala a celor doua tensiuni, pe cand cele de tip integrator actioneaza mai lent insa pot realiza o echilibrare totala a celor doua tensiuni.
compensatoare de tip proportional In figura 6 este prezentat un compensator automat de tip proportional, alcatuit din rezistenta etalon Re si din amplificatorul A avand rezistenta de intrare R1 foarte mare si admitanta Y.
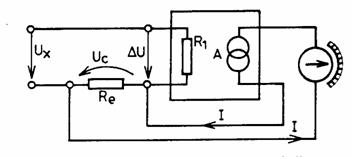
Fig. Schema unui compensator automat de tip proportional.
In cadrul acestui compensator, tensiunea de masurat Ux este comparata cu caderea de tensiune Uc pe rezistorul etalon, Re, data de curentul de iesire I al amplificatorului. Diferenta dintre aceste tensiuni DU = Ux - Uc este aplicata la intrarea amplificatorului care produce curentul de iesire I = Y DU si astfel bucla se inchide. Rezulta ca:
![]() (10)
(10)
Un astfel de compensator nu poate asigura echilibrarea totala a celor doua tensiuni Ux si Uc. Din relatia (10) rezulta ca valoarea diferentei de tensiune remanenta este data de relatia:
![]() (11)
(11)
prin urmare DU reprezinta eroarea statica a acestui tip de compensator. Aceasta eroare poate fi micsorata prin marirea admitantei Y si/sau a rezistentei Re.
compensatoare de tip integrator Schema unui astfel de compensator este prezentata in figura 7. Aici diferenta DU dintre tensiunile Ux si Uc este amplificata in amplificatorul sensibil la faza ASF si folosita pentru actionarea unui servomotor reversibil SMR, care prin intermediul unui mecanism cu angrenaje si parghii MAP efectueaza deplasarea cursorului pe divizorul de tensiune in pozitia pentru care DU devine nula. Totodata, acelasi mecanism realizeaza si pozitionarea corespunzatoare a indicatorului sau inscriptorului fata de scala aparatului.
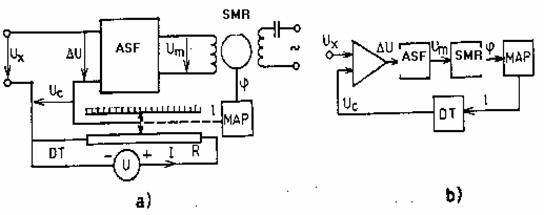
Fig. 7. Compensator automat de tip integrator:
a) schema electrica simplificata; b) schema bloc a sistemului inchis.
Ca si in cazul precedent este vorba de un sistem inchis de urmarire cu actiune dupa abatere, dar aici elementul de executie este de tip integrator. Daca se neglijeaza inertia servomotorului, deplasarea unghiulara j a rotorului este data de relatia:
![]() (12)
(12)
Daca se neglijeaza inertia, frecarile si jocurile din celelalte elemente ale sistemului, acestor elemente li se pot asocia modele matematice foarte simple. Astfel, pentru amplificator
![]() (13)
(13)
pentru mecanismul de transformare a deplasarii unghiulare j in deplasare liniara l:
![]() (14)
(14)
iar pentru divizorul de tensiune care furnizeaza tensiunea Uc:
![]() (15)
(15)
Regrupand termenii, obtinem:
![]() (16)
(16)
Derivand in raport cu timpul obtinem:
![]() (17)
(17)
Rezulta ca la echilibru, care se obtine in regim stationar cand dUc / dt = 0, se obtine Uc= Ux adica o echilibrare cvazitotala.
In figura 8 se prezinta schema electrica simplificata a unui compensator automat de tip integrator cu o singura marime indicata si inregistrata.
Rf
![]()
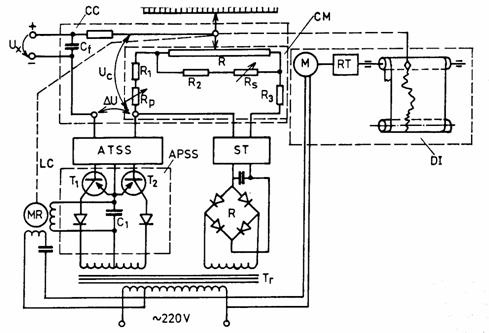
Fig.8. Schema unui compensator cu echilibrare automata.
Elementele componente esentiale ale acestui tip de aparat sunt urmatoarele:
- circuitul de masurare, CM, alcatuit din reostatul R, din rezistoarele R1, R2 si R3 si din reostatele Rs si Rp pentru ajustarea sensibilitatii acestui circuit;
- circuitul de comparare, CC, alcatuit din filtrul Rf Cf prin care se introduce tensiunea de masurat Ux, pe de o parte si circuitul de masurare de pe care se preia tensiunea continua Uc pe de alta parte. Acest circuit genereaza ca semnal de iesire tensiunea de dezechilibru DU care dupa amplificare serveste la echilibrarea celor doua tensiuni Ux si Uc;
- transformatorul de retea, Tr, cu doua secundare: unul pentru alimentarea circuitului de masurare iar celalalt pentru alimentarea amplificatoarelor de tensiune si putere;
- redresorul, R si stabilizatorul de tensiune, ST, care asigura tensiunea constanta pentru circuitul de masurare, nemaifiind necesara sursa de tensiune pentru tarare;
- amplificatorul de tensiune sensibil la semn, ATSS, care amplifica tensiunea de dezechilibru DU
- amplificatorul de putere sensibil la semn, APSS, alcatuit din tranzistoarele T1 si T2 din diodele D1 si D2, care amplifica in putere semnalul dat de ATSS. Semnalul de iesire al acestui amplificator este aplicat pe infasurarea de comanda a motorului reversibil MR;
- motorul reversibil, MR, si lantul cinematic, LC, alcatuit din angrenaje si articulatii care asigura deplasarea contactului mobil al reostatului R in pozitia necesara echilibrarii tensiunilor Ux si Uc. Acelasi LC asigura si deplasarea in pozitie corespunzatoare a acului indicator si a inscriptorului dispozitivului de inregistrare;
- dispozitivul de inregistrare, DI, alcatuit din motorul electric de antrenare, M, din reductorul de turatie RT si din rulourile de derulare a benzii de hartie pentru inregistrare.
1.4. Compensatoare discrete pentru tensiuni continui
Caracteristic pentru acest tip de aparate este faptul ca divizorul de tensiune al acestora este alcatuit dintr-o multime de sectiuni elementare, separate prin ploturi de pe care se poate preleva un numar finit, suficient de mare, de valori ale rezistentei si tensiunii, de la zero la valoarea maxima.
Utilizarea reostatelor cu valori ale rezistentelor in trepte face posibila cuantificarea foarte fina a marimii etalon (rezistenta si, respectiv tensiunea) precum si obtinerea rezultatului masurarii sub forma numerica dupa pozitiile cursoarelor reglabile cu trepte, stabilite in urma echilibrarii tensiunii necunoscute cu tensiunea etalon cunoscuta.
Exista numeroase variante de realizare a acestor aparate care pot fi clasificate dupa mai multe criterii.
Dupa numarul reostatelor deosebim:
- compensatoare discrete monorang cu un singur reostat;
- compensatoare discrete multirang cu mai multe reostate.
La randul lor compensatoarele multirang pot fi subclasificate dupa codul in care se exprima valoarea discretizata a tensiunii. Dupa acest criteriu deosebim:
- compensatoare codificate in sistem zecimal;
- compensatoare codificate in cod binar;
- compensatoare codificate in alt cod.
Compensatoare discrete monorang. Schema de principiu a unui astfel de aparat este prezentata in figura 9.
O astfel de schema prezinta inconvenientul ca toate sectiunile dintre ploturi au aceeasi valoare iar pentru a acoperi un domeniu de masurare mare este nevoie de un mare numar de ploturi. Din acest motiv schema nu are utilizari largi.
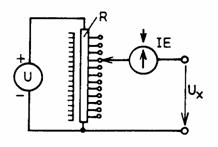
Fig.9. Schema unui compensator discret monorang.
Compensatoare discrete multirang. Pentru a elimina inconvenientul aratat mai inainte, au fost concepute si realizate compensatoarele multirang in cod zecimal si in cod binar la care sectiunile dintre ploturile diverselor reostate nu mai sunt egale ci difera intre ele in raport 1/10 in cazul codului zecimal si in raport 1/2 in cazul codului binar. Dupa echilibrare, cifra celui mai mic rang este data de reostatul asociat acestui rang, cifra rangului imediat superior este data de reostatul asociat acelui rang s.a.m.d.
compensatoare discrete zecimale. in figura 10 este prezentata schema unui compensator cu trei ranguri zecimale. Reostatul este alcatuit din trei perechi de rezistoare corespunzatoare celor trei ranguri zecimale. Rezistenta celor zece sectiuni ale celui mai mic rang este de zece ori mai mica decat rezistenta sectiunilor asociate rangului imediat urmator si de 100 ori mai mica decat rezistenta sectiunilor rangului trei.
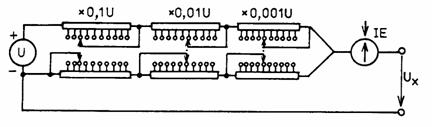
Fig.10. Schema unui compensator discret cu trei ranguri zecimale.
Cele trei perechi de rezistoare sunt inseriate iar ca rezistenta lor totala sa nu se modifice atunci cand se modifica rezistenta oricarui rang, fiecare pereche de rezistente jumelate sunt complementare in sensul ca atunci cand rezistenta unei jumatati se micsoreaza prin scurtcircuitare cu o anumita valoare, rezistenta celeilalte jumatati creste cu aceeasi valoare deoarece cursoarele celor doua jumatati sunt actionate simultan.
In acest fel oricare ar fi pozitia cursoarelor reostatelor, curentul din circuitul sursei U se mentine constant daca U = const., iar valoarea tensiunii prelevate se determina dupa pozitia celor trei perechi de cursoare si se exprima prin trei cifre zecimale.
Dupa acest principiu pot fi realizate compensatoare discrete cu mai mult de trei ranguri, precizia de masurare fiind determinata de rezistenta unei sectiuni a rangului cel mai putin semnificativ, iar domeniul de masurare - de rezistenta tuturor reostatelor puse pe valoarea maxima.
Acest tip de compensatoare prezinta doua inconveniente: existenta rezistentelor de contact a numeroase reostate care se inseriaza si dificultatea ajustarii riguroase a decadelor pereche de inalta precizie. Efectul nedorit al rezistentelor de contact poate fi diminuat daca se alege o rezistenta totala a reostatelor de ordinul zecilor de kW; insa in acest caz este necesar un indicator de echilibru de foarte inalta sensibilitate.
Exista si schema de compensatoare discrete cu mai putine reostate duble. In figura 11 sunt prezentate doua asemenea scheme de compensatoare cu doua ranguri zecimale.
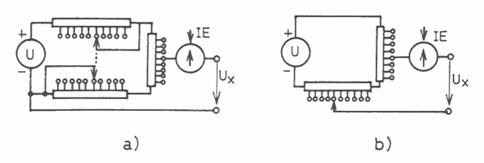
Fig.11. Scheme de compensatoare discrete:
a) cu trei ranguri zecimale; b) cu doua ranguri zecimale.
O alta cale de a ocoli inconvenientele aratate mai inainte o constituie adoptarea unor scheme cu suntarea decadelor si divizarea curentului. In figura 12 este prezentata o astfel de schema (Kelvin - Varley) cu patru ranguri zecimale. Cele patru divizoare de tensiune decadice au prize intre ele astfel concepute incat doua diviziuni ale unor decade sunt suntate de decada imediat inferioara.
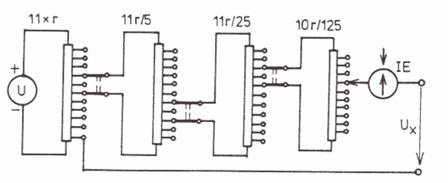
Fig.12. Compensator bazat pe suntarea rezistentelor.
Rezistenta unei decade este astfel aleasa incat sa fie egala cu dublul rezistentei sectiunii din decada de ordin imediat superior si in acest mod rezistenta celor doua sectiuni suntate este egala cu rezistenta unei singure sectiuni. In acest fel se reduce efectul rezistentelor de contact deoarece contactele rangurilor inferioare sunt parcurse de curenti din ce in ce mai mici din cauza divizarii prin 10 a curentului. In plus se obtine si o rezistenta totala relativ mai mica (sub 1 kW ) ceea ce permite o rezolutie de ~ 1 mV.
Compensatorul de precizie Feussner. In figura 13 este prezentata schema unui compensator (Feussner) cu cinci ranguri zecimale, la baza careia stau ideile prezentate in paragrafele precedente. Este de tipul cu substitutie si tarare cu circuite separate pentru tarare si respectiv pentru masurare. Reostatele cu ploturi 10 x 1000 W si 10 x 100 W sunt simple iar celelalte trei sunt duble si complementare, contactele acestora deplasandu-se simultan datorita unor manete comune.
Cele trei reostate duble sunt astfel conectate incat oricare ar fi pozitia contactelor mobile, rezistenta totala serie a acestora ramane constanta intrucat rezistenta scoasa dintr-o parte jumelata este adaugata in cealalta parte jumelata a reostatului dublu.
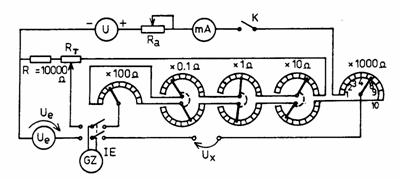
Fig. 13. Schema simplificata a compensatorului Feussner.
Tararea se face intr-o prima etapa cu ajutorul reostatului Ra si a miliampermetrului mA iar in a doua etapa, etapa de tarare precisa, se face cu ajutorul sursei de semnal etalon Ue. In aceasta faza se modifica Ra astfel incat IE sa indice zero. In prealabil cursorul reostatului RT se fixeaza in acea pozitie care sa compenseze influenta temperaturii mediului ambiant.
Tensiunea minima de masurat este de ordinul microvoltilor, iar tensiunea maxima este dependenta de rezistenta celor 5 reostate legate in serie, aceasta putand ajunge la 1,5 - 2,0 V.
Ca si in cazul compensatoarelor continui, reostatul Ra se realizeaza cu doua sau trei sectiuni inseriate: una pentru reglaj grosier, una pentru reglaj fin si eventual una pentru reglaj intermediar.
Compensatoare discrete binare. In figura 14 este prezentata schema unui compensator cu patru ranguri binare care in principiu se aseamana cu schema din figura 10, dar aici rezistentele se diferentiaza in raport 1 la 2 iar conectarea / deconectarea lor se face cu ajutorul unor chei bipozitionale. Aceste chei pot fi actionate manual, in cazul echilibrarii neautomate, sau pot fi actionate de catre relee corespunzatoare din cadrul unui dispozitiv de echilibrare automata. Rezultatul masurarii este determinat de pozitiile cheilor.
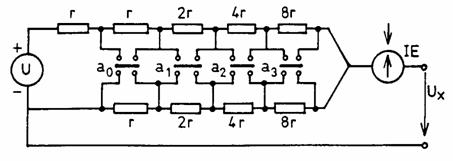
Fig. 14. Compensator discret cu patru ranguri binare.
In figura 15 este prezentata o schema de compensator cu patru ranguri binare bazata pe modificarea conductantei. Aici conductanta si inversul ei, rezistenta circuitului de masurare, se modifica cu ajutorul intrerupatoarelor k1 - k4, care introduc sau scot din circuit rezistente puse in paralel.
Atat schema din figura 15 cat si cea din figura 16 pot sta la baza unui compensator cu echilibrare automata, daca in locul IE se foloseste un bloc de echilibrare automata BEA cuplat cu un bloc de decodificare binar-zecimala si de afisare zecimala BDAZ.
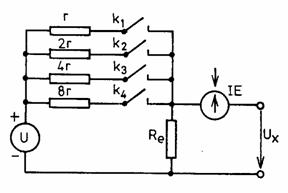
Fig. 15. Compensator discret cu rezistente in paralel.
1.5. Extinderea domeniului de masurare
Extinderea domeniului de masurare a tensiunii. Cu compensatoare de tensiune continua pot fi masurate si tensiuni mai mari de 1,5 - 2,0 V daca aceste tensiuni sunt in prealabil reduse cu ajutorul unui divizor de tensiune cu raport de divizare 10 la 1, 100 la 1 sau 1000 la 1, asa cum se vede in figura 1
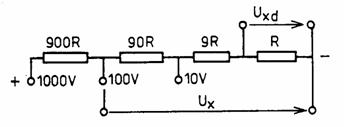
Fig.1 Extensia domeniului de masurare a tensiunii.
Tensiunea Uxd de la iesirea divizorului de tensiune, care se aplica la intrarea compensatorului este:
![]() (18)
(18)
unde Fd este factorul de divizare 10, 100 sau 1000.
Folosirea divizoarelor de tensiune are urmatoarele implicatii: divizorul solicita de la sursa un curent dependent de rezistenta sa de intrare (1 kW - 1 MW), si astfel, in timpul masurarii, sursa de tensiune Ux genereaza un curent diferit de zero. Prin urmare, masurarea tensiunii de mers in gol nu mai este posibila. De asemenea, divizoarele de tensiune introduc erori de masurare suplimentare.
Masurarea curentului continuu. Aceasta se face pe baza convertirii curentului in tensiune cu ajutorul unui rezistor calibrat. Cunoscand valoarea rezistentei R, curentul se deduce din legea lui Ohm pe baza caderii de tensiune pe rezistor:
![]() (19)
(19)
Prin urmare, masurand pe Ux si cunoscand pe R, determinam raportul lor care este curentul. Rezistenta R se alege astfel incat Ux sa intre in domeniul de masurare a compensatorului.
Masurarea rezistentei electrice. Aceasta este posibila prin folosirea compensatorului de tensiune continua si a metodei substitutiei, adica efectuand doua masurari de tensiune:
- o masurare a caderii de tensiune Ue pe un rezistor calibrat;
- o masurare a caderii de tensiune Ux pe rezistorul de masurat folosind schema din figura 17.
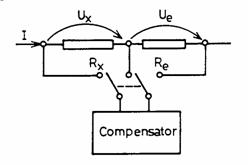
Fig.17. Masurarea rezistentei cu compensator de t.c.
Avand in vedere ca in ambele rezistoare curentul este acelasi, deducem ca:
![]() . (20)
. (20)
2. COMPENSATOARE PENTRU TENSIUNI ALTERNATIVE
Metoda compararii si echilibrarii poate fi aplicata si la masurarea tensiunilor alternative, cu conditia ca cele doua tensiuni de comparat sa aiba aceeasi forma si frecventa, urmand a se compara numai amplitudinea si faza.
Dupa modul in care se face compararea deosebim:
- compensatoare in coordonate polare;
- compensatoare in coordonate rectangulare.
Compensatoarele pentru tensiuni alternative au o precizie de masurare mai mica decat compensatoarele pentru tensiuni continue, datorita in principal faptului ca etaloanele pentru curent alternativ au erori mai mari decat cele pentru curent continuu.
Avand utilizari mai restranse, aceste aparate nu vor fi prezentate in aceasta lucrare.
3. ERORILE COMPENSATOARELOR
Principalele cauze si efectele (erorile) pe care acestea le produc sunt urmatoarele:
- variatia in timp a tensiunii de alimentare care afecteaza rezultatul masurarii tensiunii Ux cu eroarea dU
- variatia cu temperatura a rezistentei divizorului de tensiune si abaterile de la valorile nominale ale acestei rezistente datorita imperfectiunii procesului de fabricatie, care afecteaza rezultatul masurarii cu eroarea dUR
- echilibrarea incompleta a tensiunii de masurat cu tensiunea etalon, care produce eroarea dUe
- influenta rezistentelor de contact la compensatoarele discrete, care afecteaza masurarea cu eroarea dURC
- inductia de efecte parazite, care afecteaza masurarea cu eroarea dUp
- imperfectiuni ale gradarii scarii continue la compensatoare de tip analogic sau imperfectiuni de executie a reostatelor cu ploturi la compensatoarele discrete, care produc eroarea dUg
Eroarea totala maxima posibila reprezinta suma erorilor enumerate mai inainte, adica:
![]() (21)
(21)
Erorile enumerate mai inainte apar, fiecare intr-o masura mai mare sau mai mica, la toate tipurile de compensatoare. Asa de pilda, erorile cauzate de rezistentele de contact, apar mai pregnant la compensatoarele discrete cu multe reostate cu ploturi. Erorile cauzate de variatia cu temperatura a rezistentei divizoarelor de tensiune sunt mai mari la compensatoarele industriale si mai mici la compensatoarele de laborator s.a.m.d.
Un caz aparte il constituie erorile produse de rezistentele de contact la compensatoarele discrete. Acestea se insumeaza in cazul reostatelor inseriate si au valoarea asociata unui singur reostat in cazul compensatoarelor cu reostate in paralel.
In mod normal suma acestor erori ar trebui sa fie mai mica decat rezolutia compensatorului, adica sa fie mai mica decat cea mai mica diviziune ce poate fi sesizata pe scara compensatorului analogic, sau mai mica decat cea mai mica cuanta sesizata de compensatorul discret.
La un compensator discret cu 4 ranguri zecimale cuanta elementara (rezolutia) este U/9999 10-5 U, unde U este tensiunea de alimentare a divizorului de tensiune, prin urmare dU 10-5U. Pentru a realiza aceeasi rezolutie, cu ajutorul divizoarelor de tensiune binare sunt necesare 14 ranguri binare cu care se pot creea 214 = 1384 cuante elementare > 9999.
Cunoscand cauzele erorilor se pot lua masuri de diminuare a lor. Astfel, eroarea datorata variatiei tensiunii sursei de alimentare poate fi diminuata prin etalonare la intervale cat mai mici sau prin utilizarea unei surse de tensiune stabilizata.
Eroarea datorata rezistentei de contact se diminueaza prin prelucrarea ingrijita a reostatului continuu si a reostatelor cu ploturi, prin folosirea de materiale speciale pentru cursor, pentru comutatoare si chei, prin folosirea comutatoarelor si cheilor electronice statice s.a.
Erorile datorate inductiei electromagnetice pot fi diminuate printr-o buna izolare si blindare a conductorilor, prin amplasarea judicioasa a componentelor in cadrul aparatului s.a.
4. PUNtI DE MaSURARE ELECTRICE
4.1. Caracterizare generala
Puntile de masurare electrice sunt aparate cu care se pot masura marimi electrice ca: rezistenta, capacitatea, inductanta si in general impedanta sau oricare alta marime convertita in prealabil in una din aceste marimi electrice.
In principiu o punte electrica obisnuita (Wheastone) este alcatuita din patru brate si doua diagonale; pe brate se conecteaza cate una sau mai multe componente pasive: rezistente, capacitati sau inductante. Pe una din diagonale, diagonala de alimentare, se conecteaza o sursa de alimentare iar pe cealalta diagonala, diagonala de masura, se conecteaza un aparat de masurare a diferentei de tensiune, eventual montat in paralel cu o rezistenta de sensibilizare Rs. in figura 18 este prezentata puntea Wheatstone.
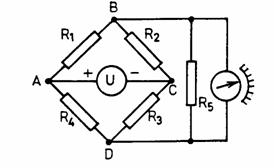
Fig. 18. Puntea electrica Wheatstone.
Clasificare. Diversele tipuri de punti de masurare se pot clasifica dupa mai multe criterii. Astfel:
Dupa natura marimii masurate deosebim:
- punti pentru masurat rezistente;
- punti pentru masurat capacitati;
- punti pentru masurat inductante;
- punti pentru masurat impedante.
Dupa natura sursei de alimentare distingem:
- punti alimentate cu tensiune continua;
- punti alimentate cu tensiune alternativa.
Cu puntile alimentate in tensiune continua se pot masura numai rezistente pe cand cu punti alimentate in tensiune alternativa se pot masura rezistente, capacitati, inductante si in general - impedante. In primul caz, pe bratele puntii se amplaseaza numai rezistoare pe cand in celalalt caz pe brate se amplaseaza, dupa caz, rezistoare si cel putin un condensator sau o bobina.
Dupa destinatia si caracterul masurarii distingem:
- punti pentru masurari discontinui;
- punti pentru masurari continui.
In primul caz este vorba de puntile folosite indeosebi in laboratoare si ateliere pentru masurari succesive a mai multor marimi, pe cand in al doilea caz este vorba de masurarea continua a aceleiasi marimi.
Dupa domeniul de valori ale rezistentei masurate deosebim:
- punti pentru masurat rezistente de valori medii (punte Wheatstone), la care obiectul masurat este un dipol;
- punti pentru masurat rezistente de valori foarte mici (punti Thomson) la care obiectul masurat este un cuadripol;
- punti pentru masurat rezistente de valori foarte mari la care obiectul masurat este un tripol.
Puntile de masurare acopera un domeniu de masurare extrem de larg. Astfel, cu diferite tipuri de punti se pot masura rezistente de la fractiuni de ohm pana la rezistente de ordinul gigaohmilor, cu erori de la 0,01% la 1 - 2%, in functie de clasa de precizie a puntii.
In general, puntile absorb de la sursele de alimentare puteri mici si au sensibilitate inalta mai ales daca aparatul cu care se masoara tensiunea de pe diagonala de masura este dotat cu un amplificator.
Progresele tehnologiei moderne, indeosebi ale microelectronicii se reflecta si in imbunatatirea raportului pret-performanta ale puntilor de masurare moderne prin imbunatatirea calitatii si ieftinirea rezistoarelor, condensatoarelor si bobinelor de precizie folosite ca etaloane, in realizarea unor indicatoare de echilibru si milivoltmetre extrem de sensibile, in realizarea unor dispozitive de echilibrare automata cu microprocesoare s.a.
4.2. punti de rezistente alimentate cu tensiune continua
Punti neechilibrate In figura 18 este prezentata o punte Wheastone neechilibrata pentru masurat rezistenta. Presupunand ca rezistenta interna a sursei este nula, Ris = 0, iar rezistenta de intrare a aparatului de masurat este infinita, Ria = si aplicand legile lui Kirckoff asupra circuitelor acestei punti, obtinem o relatie intre diferenta de potential de pe diagonala de masura UBD pe de o parte si valoarea tensiunii de alimentare U si rezistentele bratelor, pe de alta parte, sub forma:
 (22)
(22)
Daca rezistenta de sensibilizare Rs , adica daca rezistorul de sensibilizare nu exista sau nu este conectat, relatia devine mai simpla:
 (23)
(23)
Daca se cunoaste U si trei din rezistentele bratelor, se poate determina rezistenta celui de al patrulea brat, de obicei bratul cu R3 sau R4.
Sub aceasta forma puntea se numeste neechilibrata si are o utilizare relativ redusa, deoarece rezultatul masurarii este determinat si de tensiunea U, care este greu de mentinut riguros constanta sau ar mari costul aparatului prin folosirea unei surse stabilizate. In plus, precizia masurarii depinde de precizia aparatului cu care se masoara tensiunea UBD.
Punti echilibrate manual. Conditia de echilibru Daca prin modificarea rezistentei cunoscute a unuia sau a doua brate se reuseste ca diferenta de potential UBD de pe diagonala de masura sa fie nula, se spune ca puntea este echilibrata. In acest caz, cand UBD = 0, se obtine conditia de echilibru sub forma:
![]() . (24)
. (24)
Se observa ca in acest caz, in relatia de echilibru nu mai intervine tensiunea de alimentare U, rezistenta interna a sursei de alimentare si a indicatorului de echilibru si ca, daca se cunosc rezistentele de pe trei laturi se poate determina rezistenta celui de al patrulea.
Daca rezistentele a doua brate, de exemplu bratele 1 si 4, se mentin constante iar rezistenta altui brat, de exemplu bratul 2, se modifica pentru a echilibra puntea, se obtine o punte echilibrata la care:
![]() (25)
(25)
In acest caz valoarea rezistentei R3 se determina conform relatiei 25, scala aparatului fiind pusa in corelatie directa cu contactul mobil al reostatului R2, asa cum se vede in figura 19,a. Pentru constatarea echilibrului puntii se foloseste un indicator de echilibru IE, care poate fi un galvanometru de zero, montat pe diagonala de masura iar pentru realizarea conditiei de echilibru se actioneaza asupra reostatului R2 astfel incat IE sa indice zero.
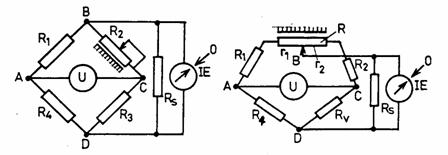
Fig.19. Punti de masura cu echilibrare manuala:
a) prin variatia unui brat; b) prin variatia a doua brate.
Echilibrarea puntii se poate realiza si prin modificarea simultana a doua rezistente situate pe brate adiacente, asa cum se vede in figura 19,b. In acest caz conditia de echilibru are forma:
![]() (26)
(26)
Se observa ca efectul deplasarii cursorului in acest caz este dublu fata de cazul precedent deoarece in timp ce rezistenta r2 de la numarator creste, rezistenta r1 de la numitor scade cu aceeasi valoare si invers.
Din cele aratate se constata ca exista o asemanare de principiu intre puntile de masurare echilibrate si compensatoare in sensul ca la ambele tipuri de aparate este vorba de echilibrarea unor marimi sau a efectelor acestor marimi. Echilibrarea se poate face relativ usor fie de catre un operator uman fie de catre un dispozitiv de echilibrare automata.
Sensibilitatea puntilor de masurare. Exista mai multe modalitati de a defini sensibilitatea unei punti de masurare Wheastone. In aceasta lucrare prin sensibilitatea puntii vom intelege raportul dintre tensiunea ce apare pe diagonala de masura UBD si tensiunea de alimentare U, atunci cand una din rezistentele bratelor variaza cu DR fata de valoarea corespunzatoare echilibrului, adica:
 (27)
(27)
Daca rezistenta variabila este, de exemplu, R1, relatia precedenta devine:
 (28)
(28)
Considerand ca rezistenta interna a sursei de alimentare este neglijabila si ca rezistenta indicatorului de echilibru tinde catre infinit, tensiunea UBD este data de relatia:
 (29)
(29)
Sensibilitatea puntii in raport cu R1 este:
S =  (30)
(30)
In
general se accepta ca DR1 << R1. Daca notam  si
si ![]() (factorul de reglaj) din (41) prin
impartire cu R1R4 se obtine:
(factorul de reglaj) din (41) prin
impartire cu R1R4 se obtine:
 , (31)
, (31)
unde F = A/(1 + A)2 se numeste factorul puntii.
Sensibilitatea maxima. Pentru o variatie DR data, sensibilitatea maxima a puntii se obtine atunci cand factorul puntii F are valoare maxima. Aceasta valoare se obtine din anularea derivatei lui F in raport cu A, adica:
![]() (32)
(32)
Prin urmare, sensibilitatea maxima a puntii se obtine in cazul in care rezistentele de pe bratele alaturate diagonalei de masura sunt egale doua cate doua, adica R1 = R2 si R3 = R4. Altfel spus, sensibilitatea maxima se obtine in cazul in care indicatorul de echilibru este conectat la "mijlocul electric" al celor doua brate alimentate la extremitati cu tensiunea U.
De mentionat ca este indiferent modul in care se raporteaza cele doua rezistente alaturate IE pentru exprimarea raportului A, deoarece inlocuind in expresia lui F pe A cu 1/A se obtine acelasi rezultat. De asemenea, se poate constata ca daca la o punte, diagonala cu sursa de alimentare schimba locul cu diagonala de masura, conditia de echilibru ramane aceeasi.
De retinut si faptul ca in practica, sensibilitatea maxima posibila nu este atinsa decat in mica masura. La puntile Wheastone obisnuite, cea mai mare sensibilitate se obtine la mijlocul domeniului de masurare si scade spre extremele acestuia. De aceea, pentru a avea posibilitati de a masura cu sensibilitate maxima, se recurge la utilizarea puntilor cu mai multe domenii de masurare.
Punti cu mai multe domenii de masurare. Din analiza relatiei R3 = R2R4/R1 = kR2 se observa ca domeniul de masurare al puntii este determinat in principal de factorul k = R4/R1. Modificand in trepte acest factor, obtinem tot atatea domenii de masurare cate trepte de valori ale raportului k se realizeaza. In figura 20 se prezinta o punte cu 9 scari obtinute prin combinatiile de conexiuni ale rezistentelor de pe bratele 1 si 4.
In functie de modul in care se cupleaza rezistentele de pe bratele l si 4 rezulta cele 9 domenii de masurare, caracterizate prin coeficientii kij, dupa cum urmeaza:
![]() (33)
(33)
Prin alegerea corespunzatoare a rezistentelor amplasate pe bratele 1 si 4 se pot realiza R4j/R1i cuprinse intre 10-4 si 104 in 9 trepte care difera intre ele cu factorul 10. Astfel, daca Ro se adopta ca o rezistenta de referinta iar celelalte rezistente de pe bratele 1 si 4 au valorile: R11 = 10Ro, R12 = 1Ro, R13 = Ro/10, R41 = 1000 Ro, R42 = Ro iar R43 = Ro/1000 se obtin urmatoarele valori ale lui kji : 10-4, 10-3, 10-2, 10-1, 10o, 101, 102, 103 si 104.
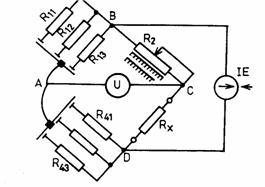
Fig. 20. Punti de masurare cu mai multe domenii.
Dupa echilibrare, rezistenta Rx se determina dupa rezistenta bratului 2 multiplicata cu factorul kji dependent de rezistentele R1i si R4j conectate. O astfel de punte ofera posibilitatea alegerii unui domeniu de masurare pentru care sensibilitatea puntii sa fie maxima.
Punti cu reostate cu ploturi. Daca in locul reostatelor cu cursor continuu se monteaza o cutie cu rezistente decadale cu ploturi, se obtine o punte de masurare la care rezultatul masurarii (dupa echilibrare) se obtine sub forma numerica, dupa pozitia butoanelor cutiei cu rezistente. Astfel, cu o cutie avand 6 rezistente decadale (cu cate 10 ploturi fiecare), de la decada zecimilor de ohm pana la decada zecilor de mii de ohm, se obtine o scara de valori ale rezistentei de la 0 la 106 cu trepte de 0,1 W
4.3. Punti pentru masurari industriale
Legarea la punte a rezistoarelor de masurat Daca masurarea rezistentei se face in laborator, rezistorul a carei rezistenta se masoara se leaga la puntea de masurare, la bornele de intrare ale acesteia. Daca insa rezistorul este de tip traductor rezistiv montat intr-o instalatie tehnologica aflata la distanta de zeci sau sute de metri de punte, se pune problema luarii in consideratie a rezistentei conductorilor de legatura.
Ceea ce deranjeaza cel mai mult in cazul folosirii conductorilor de legatura nu este atat faptul ca acestia adauga la rezistenta de masurat propria lor rezistenta, ci mai ales faptul ca acesti conductori sufera influenta factorilor de mediu in care sunt amplasati, in special influenta temperaturii care modifica rezistenta acestora si in acest fel modifica rezultatul masurarii. Prin urmare, se pune problema eliminarii influentei variatiei rezistentei conductorilor de legatura.
Legarea la punte cu trei conductori. Cea mai eficace metoda de a elimina influenta variatiei rezistentei conductorilor de legatura este aceea de a lega traductorul rezistiv la punte cu trei conductori, asa cum se arata in figura 21.
r2

![]()
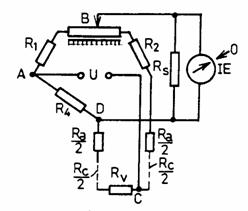
Fig. 21. Legarea la punte cu 3 conductori.
Unul din conductori este montat pe bratul 2 al puntii, altul este montat pe bratul adiacent iar cel de al treilea conductor constituie prelungirea pana la rezistorul Rx a diagonalei de alimentare a puntii. In acest fel rezistentele conductorilor de pe bratele adiacente au efecte egale si opuse si in consecinta acestea se anihileaza, iar marimea sau variatia rezistentei diagonalei de alimentare la puntile echilibrate este neglijabila nu are influenta asupra masurarii.
Intrucat etalonarea scalei puntii se face avand la baza o anumita valoare a rezistentei bratelor 2 si 3 iar lungimea conductorilor de legatura difera de la o aplicatie la alta, este recomandabil ca la rezistenta conductorilor de legatura sa se adauge o rezistenta aditionala Ra aleasa in functie de rezistenta conductorilor astfel incat rezistenta totala luata in seama la etalonarea puntii sa fie RE = Rx + Rc + Ra.
In aceste circumstante deducem ca valoarea maxima a rezistentei ce se poate masura cu o punte ca cea din figura 21 este:
 , (34)
, (34)
iar valoarea minima a acesteia este:
 (35)
(35)
unde R = r1 + r2.
Punti cu echilibrare automata. Pentru masurarea continua a unor variabile tehnologice cu ajutorul traductoarelor rezistive se folosesc punti cu echilibrare automata. Acestea sunt in fond sisteme de reglare (urmarire) cu actiune dupa abatere la care semnalul abaterii este tocmai semnalul UBD de pe diagonala de masura a puntii. In figura 22 este prezentata schema simplificata a unei astfel de punti.
Diferenta de potential UBD de pe diagonala de masura este transformata intr-o tensiune alternativa, avand faza j determinata de semnul lui UBD. Aceasta operatie are loc intr-un modulator sensibil la faza, MSF, cuplat cu un amplificator de tensiune si putere sensibil la faza ASF, care in final furnizeaza un semnal menit ca prin intermediul unui servomotor SMR sa deplaseze cursorul reostatului de echilibrare in pozitia corespunzatoare echilibrului, pentru care UBD = 0.
Daca puntea ar fi alimentata cu tensiune alternativa, modulatorul nu ar fi necesar deoarece puntea furnizeaza tensiune UBD alternativa.
Servomotorul reversibil, SMR, in cazul de fata, este alcatuit dintr-un micromotor bifazat reversibil al carui sens de rotire este determinat de faza j a semnalului amplificat si dintr-un lant cinematic de angrenaje si alte elemente necesare, LC, care efectueaza deplasarea cursorului, a indicatorului si a inscriptorului dispozitivului de inregistrare analogica a marimii masurate.
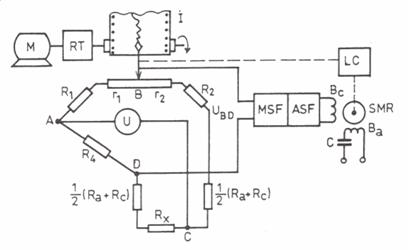
Fig. 22. Punte cu echilibrare automata.
Infasurarea de comanda BC a SMR este alimentata de ASF iar cealalta infasurare Ba este alimentata de la retea prin intermediul condensatorului C, care face ca fluxul electromagnetic creat de aceasta bobina sa fie decalat cu 90o fata de fluxul creat de BC. Intrucat cele doua bobine ale statorului BC si Ba sunt decalate spatial cu 90o, in rotor ia nastere un camp magnetic invartitor, care dezvolta un cuplu intr-un sens sau altul in functie de faza semnalului care alimenteaza bobina BC. Daca UBD> 0 tensiunea de comanda si tensiunea de alimentare sunt sinfazice si SMR se roteste intr-un sens, iar daca UBD < 0, cele doua tensiuni sunt in opozitie de faza si SMR se roteste in celalalt sens.
Aparatul este prevazut si cu un dispozitiv de inregistrare automata constand din motorul de antrenare M, reductorul de turatie RT, rulourile pentru infasurarea benzii de hartie pe care se inscriptioneaza evolutia in timp a marimii masurate si inscriptorul I.
Surse de alimentare si indicatoare de echilibru. Ca sursa de alimentare, in prezent se folosesc redresoare cu filtre de netezire si cu stabilizatoare de tensiune continua, dar pot fi folosite si pile electrochimice sau acumulatoare.
Ca indicator de echilibru se pot folosi galvanometre magnetoelectrice sau indicatoare electronice cu amplificatoare. Indicatoarele cu amplificare directa de tensiune continua pot detecta tensiuni de ordinul 10mV avand o rezistenta interna de ordinul zecilor de kW. Indicatoarele electronice avand la baza modulatoare cu tranzistoare cu efect de camp pot detecta tensiuni de ordinul fractiunilor de mV.
In cazul alimentarii de la retea a puntii si a indicatorului de echilibru este foarte important sa se asigure izolarea acestora fata de retea, folosind transformatoare de retea ecranate.
4.4. Punti pentru masurat rezistente foarte mici
Punti duble Thomson. Pentru masurarea rezistentelor foarte mici cuprinse intre 10-6W si 1W apar probleme cauzate de faptul ca rezistentele de contact si rezistentele conductorilor de conexiuni sunt cam de acelasi ordin de marime cu rezistentele de masurat.
Eliminarea influentei conductorilor de legatura poate fi eliminata daca rezistenta de masurat se conecteaza direct la bornele sursei si ale indicatorului de echilibru ceea ce este foarte incomod si nu rezolva problema rezistentelor de contact.
Eroarea introdusa de conductorii de legatura poate fi compensata astfel: se face o masurare cu bornele rezistentei de masurat in scurt circuit, apoi o masurare cu rezistenta conectata. Din valoarea rezistentei obtinuta in a doua masurare se scade valoarea obtinuta in prima masurare.
Rezistentele de contact sunt dependente de tipul contactului, de gradul de strangere si de calitatea suprafetei de contact. La contactele cu fise conice rezistenta de contact este de ordinul sutelor de mW iar la cutiile de rezistente cu ploturi aceasta este de ordinul mW in cazul contactelor sudate rezistenta de contact este nula.
Pentru a elimina influenta rezistentelor de contact trebuie separata functia de alimentare a puntii de functia de masurare, disociind bornele respective. Se ajunge astfel la rezistorul cu patru borne reprezentat in figura 23.
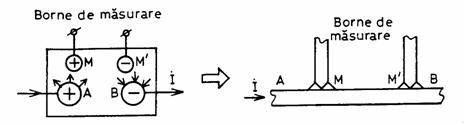
Fig. 23. Rezistor cuadripolar.
Curentul I strabate bornele de curent A si B si produce intre bornele de tensiune MM' o cadere de tensiune, utilizata in circuitul de masurare. Prizele de tensiune sunt realizate din doua lamele paralele, care lasa in exterior bornele de curent si astfel tensiunea dintre bornele MM' reprezinta tocmai caderea de tensiune de la bornele rezistentei de masurat si nu inglobeaza si caderile de tensiune pe rezistentele de contact A si B, strabatute de curentul de alimentare.
Conectand o astfel de rezistenta cuadripol intr-o punte Wheatstone, pentru a fi masurata cu sensibilitate maxima, se obtine puntea din figura 24,a, echivalenta cu puntea din schema din figura 24,b, care este o punte dubla de tip Thomson-Kelvin.
Pentru a deduce conditia de echilibru a puntii duble se folosesc ecuatiile lui Kirchoff pe cele trei bucle, in ipoteza ca puntea este echilibrata:
 . (36)
. (36)
Conditia ca acest sistem sa aiba solutii diferite de zero, adica puntea sa fie in echilibru, este ca determinantul sistemului sa fie nul:
 . (37)
. (37)
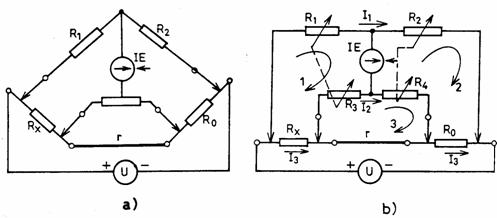
Fig. 24. Puntea dubla Thomson:
a) schema de principiu; b) schema practica.
Dezvoltand acest determinant se obtine:
 (38)
(38)
unde ![]()
Pentru ca rezultatul masurarii sa nu depinda de e si deci pentru a usura echilibrarea puntii este necesar ca r = 0, ceea ce se poate obtine daca r = 0 sau daca R1R4 =R2R3. Pentru a realiza cea de a doua conditie, manetele reostatelor R1 si R3 si ale reostatelor R2 si R4 se cupleaza doua cate doua astfel incat valorile rezistentelor lor sa fie egale doua cate doua. In aceasta situatie:
![]() (39)
(39)
Sensibilitatea puntii duble este determinata de tensiunea de alimentare U, de sensibilitatea indicatorului de echilibru si de valorile rezistentelor puntii. Eroarea de masurare cu o astfel de punte poate fi coborata sub 0,1 %.
4.5. Punti pentru masurat rezistente foarte mari
Masurarea cu punti Wheatstone a rezistentelor mai mari de 10 MW prezinta urmatoarele implicatii:
- indicatoarele de echilibru trebuie sa aiba rezistente de intrare extrem de mari;
- rezistentele de pe bratele puntii trebuie sa aiba, de asemenea, valori foarte mari;
- rezistentele de izolatie au o influenta mare.
Pentru masurarea rezistentelor de pana la 109- l010 W se pot folosi indicatoare de echilibru cu amplificator de tensiune cu TEC, care asigura o sensibilitate suficient de mare. Peste aceste valori sunt mai indicate electrometrele cu modulator cu diode Varicap.
La alegerea valorilor rezistentelor de pe bratele puntii exista urmatoarele solutii. Prima consta in utilizarea rezistentelor de valori mari, comparabile cu Rx. In acest mod se asigura sensibilitate ridicata dar nu poate fi asigurata o precizie mare din cauza instabilitatii rezistentelor de valori foarte mari.
O alta solutie consta in utilizarea unor rezistente de valori moderate dar puternic inegale, asigurandu-se astfel o stabilitate buna dar pe seama scaderii sensibilitatii.
Cea de a treia solutie, care evita rezistente cu valori foarte mari, este cea sugerata in figura 25,a. Aici, bratul de rezistenta mare al puntii este inlocuit cu un circuit in T, alcatuit din rezistoarele R1, R2 si R3. Prin transformarea acestuia in triunghi (in TT) rezistenta echivalenta R1 + R2 + R1R3/R2 poate fi considerata mai mare decat valorile componentelor R1, R2, R3. Elementul variabil al puntii (reostatul) este plasat pe bratul opus bratului cu Rx, ceea ce are avantajul ca prin reducerea lui la zero se ajunge la Rx
Influenta rezistentelor de izolatie poate fi redusa prin utilizarea unui ecran de garda, legat la unul din nodurile puntii, care intercepteaza curentii de izolatie, impiedicand astfel inchiderea acestora prin partile critice ale puntii. Ecranul garda "imbraca" zonele critice ale puntii si face ca toate rezistentele de izolatie sa apara in paralel pe bratele de rezistenta mici ale puntii, asa cum se arata in figura 25,b.
Rezistentele cu valori mai mari de 109 W se masoara utilizand tensiuni de alimentare de ordinul sutelor de volti. Sursele de tensiune trebuie sa fie stabile si reglabile. Ele sunt de fapt generatoare electronice de tensiune stabilizate.
Din cauza curentilor de polarizare echilibrul puntii devine stabil abia dupa cateva minute de la aplicarea tensiunii. Este recomandabila repetarea masurarii cu polaritate inversa a tensiunii pentru eliminarea erorilor de efecte de neliniaritate sau de decalaje de tensiune.
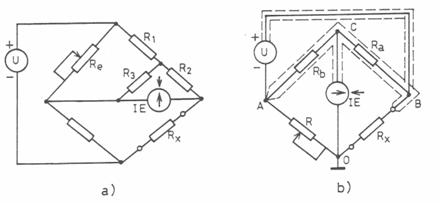
Fig. 25. Punte pentru masurat rezistente foarte mari:
a) cu rezistor tripolar; b) cu ecran de garda.
5. Punti alimentate cu tensiune alternativa
5.1. Caracterizare generala
Puntile alimentate cu tensiune alternativa prezinta unele avantaje fata de cele alimentate cu tensiune continua si anume: o amplificare mai usoara a tensiunii alternative de dezechilibru precum si posibilitatea de a masura nu numai rezistente ci si capacitati, inductante si impedante. Cele mai uzuale sunt puntile echilibrate.
Conditii de echilibru. Avand in vedere faptul ca tensiunile alternative se exprima prin vectori, conditia de echilibru a unei punti ca cea din figura 26 este data de relatia:
![]() , (40)
, (40)
in care ![]() .
.
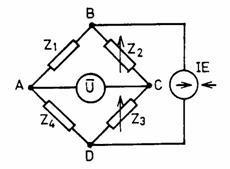
Fig. 2 Punte Wheastone alimentata cu tensiune alternativa.
Aceasta relatie intre impedante complexe este echivalenta cu urmatoarele doua relatii intre marimi scalare, in coordonate carteziene:
sau cu urmatoarele relatii in coordonate polare:
 (42)
(42)
unde![]() Cu j s-a notat
Cu j s-a notat ![]() (se evita notarea cu i pentru a nu se confunda cu intensitatea curentului).
(se evita notarea cu i pentru a nu se confunda cu intensitatea curentului).
In ambele cazuri, pentru echilibrarea puntii trebuie satisfacute simultan cele doua relatii, 41 si 42, ceea ce face ca in puntile alimentate cu tensiune alternativa sa fie necesare doua elemente variabile. Alegerea acestor elemente nu poate fi intamplatoare.
Fie conditia de echilibru (40) scrisa sub forma:
![]() (43)
(43)
unde:
Vectorul
![]() poate fi reprezentat in planul complex ca un
fazor care trebuie sa tinda catre zero cand puntea se
echilibreaza. In acest scop trebuie alese acele elemente variabile care
sa conduca la o anulare cat mai rapida a lui a si b.
poate fi reprezentat in planul complex ca un
fazor care trebuie sa tinda catre zero cand puntea se
echilibreaza. In acest scop trebuie alese acele elemente variabile care
sa conduca la o anulare cat mai rapida a lui a si b.
Posibilitati
de echilibrare. Pentru a determina traiectoria descrisa de varful
vectorului ![]() atunci cand unul din elementele puntii se
modifica se calculeaza derivata partiala a lui
atunci cand unul din elementele puntii se
modifica se calculeaza derivata partiala a lui ![]() in raport cu acel element. Daca R1 este elementul variabil
atunci:
in raport cu acel element. Daca R1 este elementul variabil
atunci:
![]() (44)
(44)
si varful lui ![]() descrie o dreapta D1 al carui coeficient unghiular este X3/R3 si care trece prin punctul M de dezechilibru initial (fig. 27).
descrie o dreapta D1 al carui coeficient unghiular este X3/R3 si care trece prin punctul M de dezechilibru initial (fig. 27).
Daca elementul variabil este x1 atunci:
![]() (45)
(45)
si varful lui ![]() descrie o dreapta
D2, perpendiculara pe
D1.
descrie o dreapta
D2, perpendiculara pe
D1.
D2
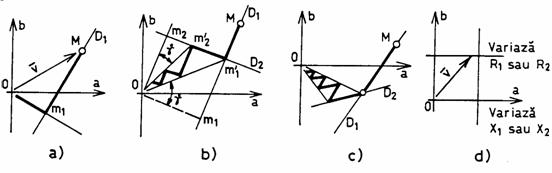
Fig. 27. Posibilitati de echilibrare a puntilor:
a) cu a si b independente si IE ideal; b) cu a si b independente si IE real;
c) cu a si b dependente; d) cu perechi de elemente variabile.
Modificand
pe R1, minimul modului
vectorului ![]() , sesizat de indicatorul de echilibru
se obtine in punctul m1.
Modificand pe X1 varful
vectorului
, sesizat de indicatorul de echilibru
se obtine in punctul m1.
Modificand pe X1 varful
vectorului ![]() aluneca pe dreapta D2 spre origine si astfel, in cazul ideal pentru
echilibrarea puntii este nevoie de numai doua reglaje - figura 27,a.
aluneca pe dreapta D2 spre origine si astfel, in cazul ideal pentru
echilibrarea puntii este nevoie de numai doua reglaje - figura 27,a.
In
realitate, sensibilitatea indicatorului de echilibru este limitata si
din aceasta cauza, la primul reglaj nu se ajunge in punctul m1, ci in punctul![]() situat in limitele unui unghi de
incertitudine g. In cadrul celui de al doilea reglaj nu se ajunge in
punctul ideal m2 ci, din
aceeasi cauza, se ajunge in punctul
situat in limitele unui unghi de
incertitudine g. In cadrul celui de al doilea reglaj nu se ajunge in
punctul ideal m2 ci, din
aceeasi cauza, se ajunge in punctul![]() situat si el in limitele unui
unghi de incertitudine g Prin alte cateva
reglaje se parcurge un traseu alcatuit din segmente de dreapta
perpendiculare din ce in ce mai mici pe masura apropierii de origine -
fig. 27,b.
situat si el in limitele unui
unghi de incertitudine g Prin alte cateva
reglaje se parcurge un traseu alcatuit din segmente de dreapta
perpendiculare din ce in ce mai mici pe masura apropierii de origine -
fig. 27,b.
Reglajele pentru echilibrarea puntii sunt mai numeroase daca dreptele D1 si D2 nu sunt perpendiculare si aceasta are loc atunci cand elementele variabile determina componente a si b dependente. Pentru a explica acest caz se considera o punte simpla in care Z3 = R3 si Z4 = R4, dotata cu IE ideal (adica g
In acest caz:
![]() . (46)
. (46)
Daca se modifica elementele R1 sau R2, derivatele partiale sunt exprimate prin valori reale:
prin urmare, in ambele cazuri varful
vectorului ![]() se deplaseaza pe o dreapta
paralela cu axa reala.
se deplaseaza pe o dreapta
paralela cu axa reala.
Daca se modifica elementele X1 sau X2, derivatele partiale se exprima prin valori imaginare
 (48)
(48)
prin urmare, varful vectorului![]() se deplaseaza pe o dreapta
paralela cu axa imaginara.
se deplaseaza pe o dreapta
paralela cu axa imaginara.
Daca
se modifica R3 sau R4, varful![]() se deplaseaza pe o dreapta
avand coeficientul unghiular X1/R, respectiv X2/R2 -
figura 27,c.
se deplaseaza pe o dreapta
avand coeficientul unghiular X1/R, respectiv X2/R2 -
figura 27,c.
Daca
se vor alege drept elemente variabile perechile (R1, R2)
sau (R3, R4) sau (X1, X2)
puntea nu va putea fi echilibrata, deoarece acestea nu permit modificarea,
atat a lui a, cat si a lui b. In aceasta situatie
tensiunea pe diagonala de masura (bornele IE) nu se va anula
niciodata, ci va atinge o valoare minimala cand varful vectorului ![]() se afla pe una din axele de coordonate -
figura 31,d.
se afla pe una din axele de coordonate -
figura 31,d.
Din cele aratate rezulta ca pentru obtinerea echilibrului puntii trebuie alese una din perechile (R1, X1) sau (R2, X2) care permit anularea lui a si respectiv a lui b, in mod independent, printr-un reglaj in segmente de dreapta perpendiculare unul pe altul.
Prin adoptarea pentru Z1, Z2, Z3 si Z4 a unor combinatii de rezistente, inductante si capacitati in serie sau/si in paralel se poate obtine o diversitate foarte mare de tipuri de punti.
Conditia de echilibru de faza j j j j arata insa ca nu orice tip de combinatii de impedante poate conduce la realizarea unei punti echilibrate. Semnul reactantelor din bratele puntii trebuie sa fie astfel ales incat conditia de faza sa fie satisfacuta, si tocmai aceasta conditie limiteaza numarul posibil de punti echilibrabile.
O alta conditie restrictiva apare in cazul in care se cere ca cele doua marimi masurate de punte sa poata fi citite separat (independent). Se poate arata ca aceasta este posibila daca doua din impedantele puntii sunt fie rezistente pure, fie reactante pure, adica doua din unghiurile j j j j sa fie 0o, + 90o sau - 90o.
5.2. Definitii si clasificari
In general, impedanta de masurat este o marime complexa de forma:
![]() , (49)
, (49)
care in cazuri particulare poate fi: Z = R, Z = jX, Z = -jX.
Pentru a o putea masura este necesar ca cel putin pe un brat al puntii sa existe un element de forma Z = R + jX, iar pe celalalt brat se aleg practic intotdeauna elemente de forma Z = R sau Z = jX.
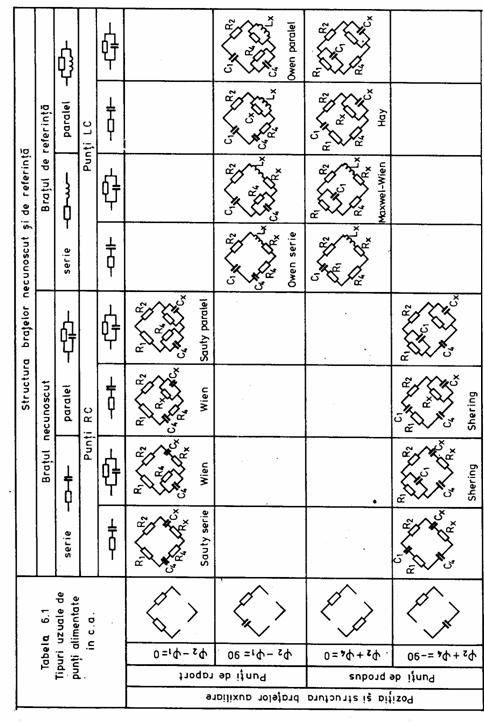
Bratul complex de impedanta Z = R + jX se numeste brat de referinta sau brat de comparatie al puntii, iar bratele simple, de forma Z = R sau Z = jX, se numesc brate auxiliare ale puntii (tabela 1).
In punte, bratele auxiliare pot fi alaturate sau opuse. De asemenea, bratul necunoscut si bratul de referinta pot fi alaturate sau opuse.
Puntile in care bratele auxiliare sunt alaturate se numesc punti de raport, iar puntile in care bratele auxiliare sunt opuse se numesc punti de produs.
In tabela 1 sunt prezentate 16 tipuri de punti de masurare echilibrabile de interes general. La acestea se mai adauga si alte tipuri de interes mai restrans.
Punti tensometrice
Tensometria este o metoda de determinare experimentala a eforturilor la care este supus un corp solid pe baza masurarii deformatiei elastice a acestuia, produse de forte externe, cunoscand ca intre starea de efort si deformatie exista o dependenta exprimata de legea lui Hook. Deformatia este perceputa / prelevata de unul sau mai multi senzori de deformatie.
Cea mai uzuala este tensometria rezistiva, cea care mijloceste determinarea deformatiei specifice pe baza masurarii variatiei rezistentei electrice a unui traductor tensometric rezistiv, care se aplica pe corpul supus unui efort care produce deformatia..
Traductoare tensometrice rezistive. Elementul primar care mijloceste transformarea deformatiei specifice D /1 intr-o variatie a rezistentei relative DR/R se numeste senzor / traductor tensometric rezistiv. Aceste traductoare sunt lipite cu ajutorul unor adezivi speciali pe suprafata piesei de studiat astfel incat ele sa sufere aceeasi deformatie ca si piesa de studiat.
Pe baza masurarii variatiei rezistentei traductorului se poate determina deformatia suferita de acesta precum si efortul specific care a produs deformatia respectiva, conform relatiilor:
![]() (50)
(50)
unde e Dl/l este deformatia specifica; s este efortul specific; E este modulul de elasticitate al corpului pe care se lipeste senzorul / traductorul.
Cele mai uzuale sunt traductoarele tensometrice cu fire si cele cu folie metalica montate pe suport electroizolant. Ele se numesc marci tensometrice, deoarece au dimensiuni relativ mici si se lipesc prin adezivi speciali pe suprafata piesei de studiat. In figura 28 sunt prezentate cateva tipuri reprezentative de asemenea marci.
Marcile tensometrice se lipesc cu firele (foliile) in directia efortului si deformatiei de masurat. Daca aceasta directie nu este cunoscuta se recurge la folosirea rozetelor tensometrice formate din trei marci situate la 45 sau 60o una fata de alta asa cum se vede in figura 28, c si d. Directia si deformatia specifica se determina prin calcul pe baza variatiei rezistentei celor trei marci.
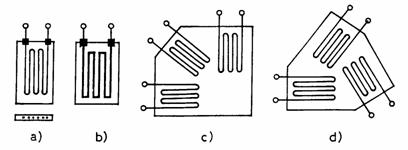
Fig.28. Marci si rozete tensometrice:
a) si b) marci tensometrice; c) si d) rozete tensometrice
Cea mai importanta caracteristica a unui traductor tensometric este sensibilitatea acestuia, definita ca raportul dintre marimea DR/R si marimea D /1 adica:
![]() (51)
(51)
Cunoscand aceasta marime precum si marimea DR/R se deduce deformatia specifica din relatia:
![]() (52)
(52)
Sensibilitatea marcilor tensometrice se determina pe cale experimentala, iar pentru materiale uzuale precum manganina, constantanul, nichelul si cromul are valori cuprinse intre 0,5 si 2,5.
Montaje tensometrice. Determinarea deformatiilor si eforturilor prin metode tensometrice consta in fond in determinarea rezistentei electrice a unor traductoare tensometrice rezistive. Din nefericire, variatii ale rezistentei electrice ale acestor traductoare pot fi provocate si de variatia temperaturii mediului ambiant. De aceea, pentru a elimina aceasta influenta asupra rezistentei traductorului, se recurge la masurarea rezistentei cu punti electrice Wheastone.
Se stie ca daca pe doua brate adiacente ale unei punti au loc variatii egale ale rezistentei provocate de variatia temperaturii, diferenta de potential pe diagonala de masura ramane nemodificata. De aceea, pentru masurari se folosesc cel putin doua traductoare tensometrice, ambele suferind aceeasi influenta a temperaturii.
In figura 29 a, se prezinta o punte care are pe un brat o marca activa a carei rezistenta este R + DR DRT si pe bratul adiacent are o marca inactiva, de compensare, a carei rezistenta este R + DRT, unde R este rezistenta marcii nesolicitate, DR este variatia rezistentei datorita solicitarii iar DRT este variatia rezistentei datorita influentei temperaturii. Acest montaj se numeste montaj in sfert de punte.
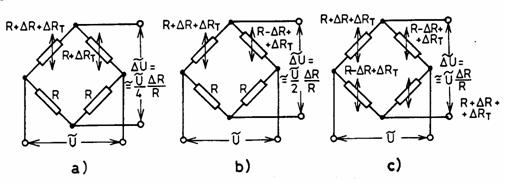
Fig. 29. Montarea marcilor tensometrice in punte:
a) montaj in sfert de punte; b) montaj in semipunte; c) montaj in punte completa.
Un montaj in semipunte este montajul din figura 29,b, unde o marca are variatie pozitiva a rezistentei cu solicitarea mecanica +DR iar cealalta marca are o variatie negativa -DR, ambele avand aceeasi influenta din partea temperaturii DRT. Acest montaj, pe langa ca realizeaza compensarea influentei temperaturii, dubleaza sensibilitatea puntii de masurare a rezistentei. Un astfel de montaj se adopta la masurarea deformatiilor de inconvoiere: o marca fiind supusa la intindere iar cealalta la compresiune.
Montajul din figura 29, c, este un montaj in punte completa si se caracterizeaza prin cea mai mare sensibilitate. El necesita insa utilizarea a patru marci tensometrice: doua supuse la intindere iar celelalte doua - la compresiune.
Pentru a nu incalzi excesiv marcile tensometrice, curentul de pe diagonala de alimentare nu trebuie sa depaseasca 20 - 30 mA. La un astfel de curent diferenta de potential de pe diagonala de masura este foarte mica si deci pentru a putea fi masurata si vizualizata comod urmeaza a fi amplificata. Intrucat tensiunile alternative sunt mai usor de amplificat decat cele continui, puntile pentru masurari tensometrice sunt alimentate cu surse de c.a. cu frecvente de ordinul KHz.
Pentru masurarea deformatiei specifice, pe baza masurarii diferentei de potential generate de puntea Wheastone se folosesc aparate denumite punti tensometrice. Este vorba de punti de masurare de inalta sensibilitate dotate cu elemente de adaptare, cu elemente de amplificare si modificare a sensibilitatii, cu elemente de etalonare si echilibrare rezistiva si capacitiva, cu elemente de afisare proprii s.a.
In majoritatea cazurilor puntile tensometrice sunt astfel concepute si realizate incat sa poata fi folosite atat la masurari statice cat si la masurari dinamice. In cazul masurarilor statice rezultatul masurarii poate fi vizualizat prin mijloacele proprii ale puntii pe cand in cazul masurarilor dinamice puntea furnizeaza un semnal de iesire pe impedanta mare pentru a fi inregistrat de catre un inregistrator rapid, de obicei - un oscilograf electromecanic sau catodic.
Puntile tensometrice pot functiona ca punti neechilibrate si/sau ca punti echilibrate, cele mai uzuale fiind insa cele echilibrate. Cu acestea se pot face atat masurari statice cat si masurari dinamice.
Schema bloc a unui tensometru este prezentat in figura 30.
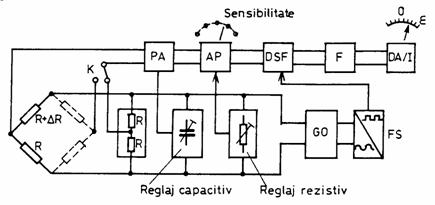
Fig.30. Schema simplificata a unei punti tensometrice cu amplificator.
Unul din elementele principale ale tensometrului este generatorul de oscilatii, GO, cu frecventa de circa 5KHz pentru alimentarea puntii Wheastone. Pe bratele acestei punti pot fi montate fie numai doua marci tensometrice, fie patru marci in functie de pozitia comutatorului K.
Puntea dispune de un reglaj capacitiv si de unul rezistiv. Tensiunea de dezechilibru de pe diagonala de masurare se aplica la intrarea preamplificatorului PA cu posibilitatea corectiei de faza, apoi se aplica la intrarea amplificatorului AP cu amplificare reglabila. Semnalul amplificat este apoi demodulat in demodulatorul sincron (sensibil la faza) comandat de GO prin intermediul formatorului de semnal dreptunghiular, FS.
Dupa demodulare semnalul este filtrat si aplicat la intrarea unui aparat indicator si/sau inregistrator static sau poate fi transmis unui inregistrator rapid (oscilograf electromecanic) pentru inregistrare in cazul masurarilor dinamice.
Puntile tensometrice pot fi simple, pentru masurarea deformatiei intr-un singur punct sau pot fi multiple, pentru a masura deformatii, simultan in mai multe puncte: 6 - 12 puncte. In cazul masurarii dinamice puntile tensometrice sunt prevazute cu iesiri pentru cuplarea lor cu un inregistrator rapid, de obicei cu un oscilograf electromecanic.
Inainte de a efectua masurari puntea tensometrica trebuie echilibrata in absenta oricarei solicitari asupra marcilor tensometrice. Este necesara atat o echilibrare rezistiva cat si una capacitiva pentru a elimina astfel influenta capacitatilor parazite a legaturilor dintre elementele sistemului de masurare.
In timpul masurarii, cand traductoarele tensometrice sunt supuse la diverse grade de deformatie, acestea produc in puntea tensometrica o diferenta de potential care constituie o masura a gradului de deformatie produs: de intindere sau de compresie, aparatul fiind etalonat in unitati de deformatie specifica.
Pentru marirea sensibilitatii sistemelor de masurare tensometrica se poate recurge la una sau mai multe din urmatoarele solutii:
- alegerea unor marci tensometrice cu sensibilitate ridicata. Se pot folosi marci din aliaj de platina cu tungsten (K = 4,5) sau din semiconductoare (K = 200). In ultimul caz apar insa efecte de neliniaritate si instabilitate termica, compensabile prin circuite electronice;
- folosirea mai multor marci tensometrice inseriate sau in paralel pe fiecare din bratele puntii de masurare sau folosirea unor marci cu rezistenta electrica relativ mare (350 . 600 ). In acest fel la acelasi curent admis (aproximativ 30mA) tensiunea de dezechilibru a puntii la aceeasi variatie a deformatiei specifice este mai mare;
- utilizarea unor senzori din elemente elastice cu deformatii specifice mari si de semne contrare care sa permita ca toate bratele puntii Wheastone sa fie active. Acesti senzori pe care se aplica marcile tensometrice urmeaza sa fie supusi eforturilor sau momentelor cuplurilor de masurat si dimensionati corespunzator ca sa produca o deformatie specifica usor sesizabila.
Cresterea sensibilitatii nu este un scop in sine. Sporirea excesiva a acesteia atrage dupa sine micsorarea stabilitatii si reproductibilitatii rezultatelor masurarii si cresterea pretului de cost a sistemului de masurare. De aceea aceasta problema se rezolva printr-un compromis.
De mare importanta practica este modul de executie si de exploatare a sistemului de senzori, modul de realizare a legaturilor dintre acestia si puntile tensometrice si alegerea optima a parametrilor de masurare mai ales in cazul masurarilor simultane multiple. Este vorba de pregatirea adezivului si marcilor inainte de lipire, de lipirea propriu-zisa, de cablarea corecta a legaturilor astfel incat influenta factorilor de mediu sa fie minora. Orice abatere de la prescriptiile de executie duce la dificultati de masurare si la erori de masurare inacceptabile.
iNTREBaRI / SUBIECTE DE CONTROL
Pe ce principiu functioneaza compensatoarele?
Prezentati si comentati schema compensatorului Poggendorf.
Comentati schema Poggendorf cu etalonare prin substitutie si tarare.
Comentati schema unui compensator cu echilibrare automata de tip integrator.
Comentati schema unui compensator discret multirang zecimal.
Prezentati si comentati schema unui compensator multirang binar.
Pe ce principiu functioneaza puntile de masurare?
Precizati ce marimi se pot masura cu ajutorul puntilor.
Prezentati schema unei punti Wheastone alimentata in c.c.
Prezentati relatia dintre marimile unei punti echilibrate.
Prezentati si comentati doua moduri de echilibrare a puntilor Wheastone.
Definiti si comentati notiunea de sensibilitate a puntilor de masurare.
Indicati cum se leaga traductoarele rezistive la punti de masurare.
Comentati schema unei punti Wheastone cu echilibrare automata.
Indicati particularitatile puntilor pentru masurat rezistente foarte mici si foarte mari.
Prezentati particularitatile puntilor pentru masurari tensometrice.
Copyright © 2026 - Toate drepturile rezervate