|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
VARIANTE DE STRUCTURI DE CELULE FLEXIBILE
1 STRUCTURA UNEI CELULE FLEXIBILE
Componentele principale care alcatuiesc o CFS sunt urmatoarele:
- masina unealta cu comanda numerica ;
- sistem de comanda pentru actionarea robotului ;
- sistem de transport (robocare) ;
- stocatorul de piese ;
- sistem de comanda si actionare a centrelor de strunjire etc.;
Caracteristicile constructive, gradul de echipare si mai ales modul de organizare a CFS sunt dependente de tipul de piese care trebuie prelucrate ,gruparea pieselor in familii de tipodimensiuni ale aceleiasi forme constructive sau familii de forme constructive relative apropiate si intr-o plaja dimensionala corespunzatoare ,precum si complexitatea formelor constructive.
Din punct de vedere al modului de organizare ,CFS pot fi grupate in doua categorii:
1.celule de organizare de tip stand-alone;
2. celule de organizare in linie.
In continuare vor fi prezentate cateva celule flexibile pentru prelucrarea pentru prelucrarea pieselor de revolutie ( de tip disc sau arbore ).
VARIANTA I
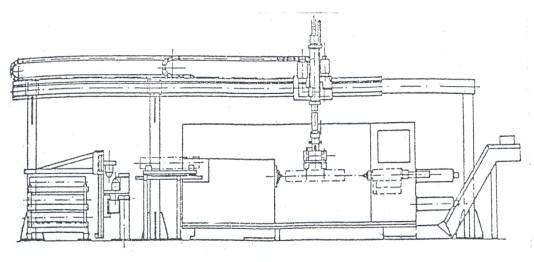
Fig. 2.1
Celula robotizata este destinata prelucrarii pieselor tip bucse si arbori. Se pot executa operatii de strunjire pe suprafete cilindrice, conice si sferice, strunjirea suprafetelor frontale, gauriri axiale, filetari exterioare si interioare. Prin utilizarea unor dispozitive speciale se pot realiza si gauriri excentrice, se pot freza canale longitudinale si transversale (frontale).
Celula este destinata productiei in serii mici si mijlocii.
Celula robotizata (fig este alcatuita din :
-strung automat SPU 40 NC ;
-robotul tip portal simplu pentru manipulare ;
-masina unealta, in varianta standard, asigura o lungime de prelucrare de max. 1500 mm.
Robotul are un sistem portant de tip portal cu o cale de ghidare sprijinita pe coloane, deasupra masinii deservite. Pe traversa portalului se deplaseaza orizontal caruciorul, realizat cu o constructie sudata, sprijinit pe lagare de rostogolire. In partea anterioara a caruciorului este fixat ghidajul pinolei ce asigura o miscare verticala, perpendiculara pe traversa portalului.
VARIANTA II
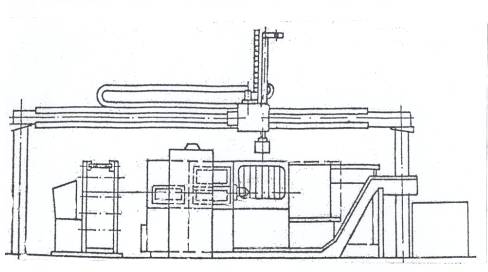
Fig. 2.2
Celula este destinata prelucrarii pieselor de tip arbore in conditiile unei productii de serie maica si mijlocie.
Se pot executa operatii de strunjire exterioara si interioara (pentru suprafete cilindrice, conoce si sferice), filetare exterioara si interioara, gaurire.
Celula robotizata se compune din :
-strungul semiautomat SPU 12 NC ;
-manipulatorul portal AME 20 ;
-magazia de arbori ZH 30/15.
Manipulatorul preia din magazie piesa, cu un dispozitiv de apucare dublu si o introduce in mandrina masinii. Dupa prelucrare si scoaterea di mandrina, piesa este asezata din nou in magazie.
Manipulatorul cu semifabricatul pregatit asteapta deasupra spatiului de lucru al masinii pana se sfarseste un ciclu de prelucrare.
VARIANTA III
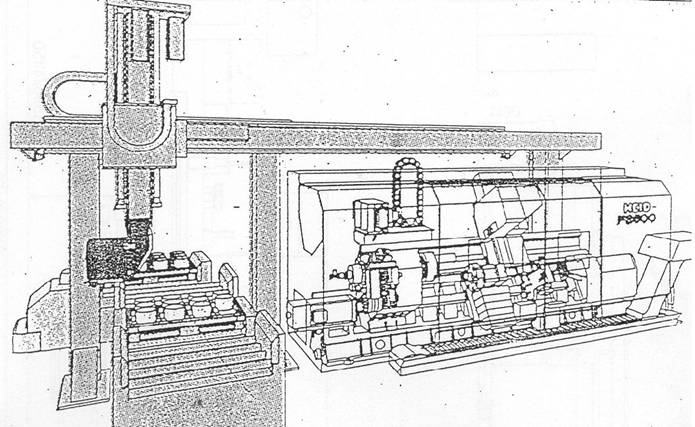
Fig. 2.3
Subsisteme componente ale celulei :
1.strung cu comanda numerica ;
2.robot tip PORTAL pentru manipularea semifabricatelor si a pieselor finite ;
3.stocator palete port-grippere ;
4. posturi de stocare intermediare ;
5.magazin de palete port-piese;
6 manipulator pentru transportul si stivuirea paletelor ;
7.gripper dublu;
8.sistem de prereglare si supraveghere a uzurii sculelor;
9.controller CNC;
Functionarea celulei:
Piesele semifabricat sunt preluate de catre robot ,de pe palete aflate pe magazinul de palete, asigurandu-se astfel transportul si incarcarea lor pe strungul adaptat functionarii.
Dupa prelucrare , RI aseaza piesa finita pe postul liber al paletei,ciclul repetandu-se.RI alimenteaza zona de lucru a masinii prin partea superioara,zona fiind in plan vertical.
Daca se doreste manipularea unor piese dispuse vertical atunci RI va realiza o miscare de rotatie la 90 de grade,spre a se duce axa piesei spre axa masinii.
Din punct de vedere al sarcinii acest RI poate manevra 320 kg ceea ce permite schimbarea atat a gripperelor ,cat si a mandrinelor avand si posibilitatea montarii acestora in axul principal al masinii.
Stocatorul de palete este cu trei posturi,doua de asteptare si unul de incarcare dotate cu role antrenate si posibilitatea de transfer a paletelor intre ele.Varianta standard poate fi extinsa cu echiparea a inca 3,4 posturi de stocare in spatiul apropiat celulei, posturi care pot fi ocupate cu grippere.
Toate axele RI ,o axa a stocatorului si axele M.U sunt comandate de un singur controller CNC ,care impreuna cu modificarile aduse RI si stocatorului confera celulei un foarte mare grad de flexibilitate si automatizare ,reducand la minimum interventiile factorului uman.
VARIANTA IV - SISTEM FLEXIBIL DE PRODUCTIE
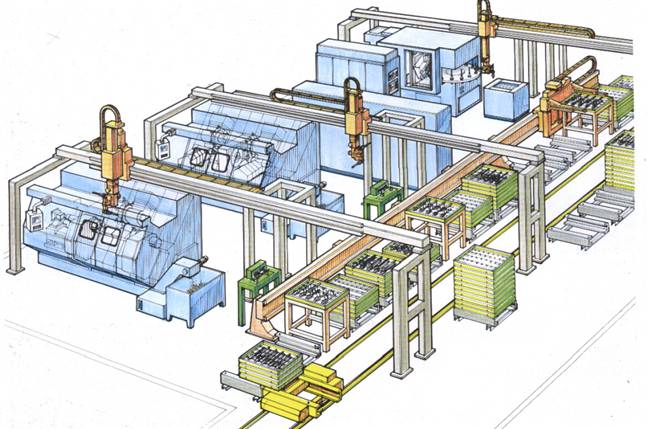
In sistemul flexibil de productie prezentat se remarca folosirea robotilor industriali de tip portal pentru alimentarea masinilor - unelte, avantajele acestui tip de robot fiind :
pot servi una sau mai multe masini-unelte fara a bloca accesul pentru efectuarea operatiilor de schimbare si reglare a sculelor sau pentru intretinere ;
in cazul defectarii accidentale a mijlocului de manipulare, operatorul uman poate prelua sarcina de servire a masinii, avand posibilitatea de acces si manevra in zona de lucru ;
suprafata de ocupare de catre mijlocul de manipulare este redusa, ;
permit transportul sarcinilor pe distante relativ mari.
Componentele sistemului flexibil de productie prezentat sunt :
robot portal simplu avand axele de deplasare comandate numeric. El preia semifabricatele din paletele de transport si le pozitioneaza pe diversele masini - unelte din sistem, pentru ca apoi sa preia piesele prelucrate si sa le aduca inapoi pe palete
schimbarea automata a sculelor. Aceasta se face rapid cu ajutorul unui gripper ( acesta poate fi la randul sau schimbat automat). In paleta , in afara de scule , sunt practicate spatii de depozitare cu suprafata plana sau tamburi ;
paletele sunt folosite pentru transportul si depozitarea diverselor piese, inclusiv piese si mandrine ( pentru piese de tip arbore) ;
palete universale pentru piese de tip flansa de diferite diametre ;
palete pentru scule - ofera spatiu pentru 60 - 80 de scule in functie de sistemul de apucare a fiecarei piese ;
sistem de paletizare cu doua axe comandate numeric ;
robocare pe sine. Sinele sunt amplasate orizontal pe podeaua halei ;
masina de danturat ;
strung frontal ;
strung cu cap revolver.
Copyright © 2026 - Toate drepturile rezervate