|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
Robotul - sistem mecatronic modern
I.1. Mecatronica
Termenul "mecatronica" (MECAnica + elecTRONICA) a fost conceput in 1969 de un inginer al firmei japoneze Yaskawa Electric si protejat pana in 1982 ca marca a acestei firme. Se referea initial la complectarea structurilor mecanice din constructia aparatelor cu componente electronice. In prezent termenul defineste o stiinta inginereasca interdisciplinara, care, bazandu-se pe imbinarea armonioasa a elementelor din constructia de masini, electrotehnica si informatica, isi propune sa imbunatateasca performantele si functionalitatea sistemelor tehnice.
Ca si in cazul multor altor domenii de mare complexitate, in literatura de specialitate nu exista o definitie unitara a notiunii de mecatronica. In IEEE/ASME Transactions on Mechatronics (1996) mecatronica a fost definita astfel: "Mechatronics is the synergetic integration of mechanical engineering with electronic and intelligent computer control in the design and manufacturing products and processes.", in traducere: "Mecatronica este integrarea sinergetica a ingineriei mecanice cu controlul electronic si cel inteligent cu calculatoare in proiectarea si fabricatia
produselor si proceselor.".(fig.1)
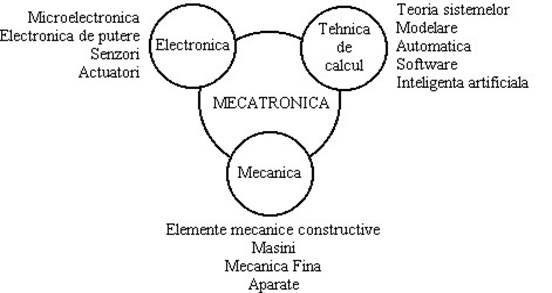
Fig.1 diagrama cu detalierea subsistemelor
Fig. 1. Diagrama pentru ilustrarea notiunii de mecatronica
I.2. Scurt istoric de la sisteme mecanice pana la siteme mecatronice
Evolutia omenirii a fost insotita de o dezvoltare lenta a uneltelor, dispozitivelor si sistemelor create si realizate de om, incepand din paleolitic si pana in secolul 18, cand odata cu inventarea masinii cu abur (James Watt - 1788), care a marcat inceputul revolutiei industriale, sistemele tehnice au cunoscut o evolutie rapida. Masina cu abur s-a constituit intr-una dintre primele borne ale procesului de inlocuire a muncii fizice, prestate de oameni si animale, cu lucrul mecanic efectuat de masini. Cateva repere importante de-a lungul acestui drum: 1775 - prima masina orizontala de gaurit si alezat tevile de tun (englezul John Wilkinson); 1784 - ciocanul mecanic cu abur; 1795 - presa cu transmisie hidraulica; 1797 - primul strung cu carucior si papusa mobila, actionate de un ax elicoidal; vaporul cu aburi (inceputul secolului 19); locomotiva cu aburi (mijlocul secolului 19).
Pe parcursul secolului al 19-lea apar si se dezvolta motoarele cu ardere interna, ca rezultat al preocuparii unor inventatori de geniu de a realiza mijloace de transport rutiere: 1807 - brevet pentru un motor cu un cilindru vertical, cu functionare cu gaz si cu aprindere cu ajutorul unei scantei electrice; 1872 - inventia motorului cu benzina si supape laterale - motorul Otto; 1887 - motorul Daimler, cu ardere interna, cu doi cilindri in V, la care aprinderea combustibilului avea loc la fiecare rotatie a arborelui (capacitatea cilindrica de 1,5 l; puterea de 7,5 CP);
Apare motorul de curent continuu in 1870 si cel de curent alternativ in 1889, care au permis, realizarea, la inceputul secolului 20, a unor sisteme mecanice cu actionare electrica (pompe, masiniunelte etc.). Electrotehnica a permis si saltul la realizarea unor sisteme mecanice cu control automat, bazate pe relee electrice, regulatoare PI, amplificatoare electrice, avand ca exponenti avioanele, masinile-unelte, turbinele cu aburi, automobilele.
Perioada de dupa cel de-al doilea razboi mondial este caracterizata prin realizari stiintifice si strapungeri tehnologice remarcabile: primul calculator electronic numeric in 1945, tranzistorul cu germaniu in 1948, cel cu siliciu in 1952, tiristorul in 1958, primul circuit integrat in 1959, laserul etc.
In 1953 la Massachussets Institute of Technology (M.I.T.) s-a realizat si s-au facut demonstratii cu o masina de frezat cu comanda numerica. Ca inceput al masinilor unelte cu comanda numerica poate fi considerata utilizarea benzii perforate in razboiul de tesut automat (de catre Jaquard) si in pianola mecanica cu program. Un rol important in perfectionarea acestor masini l-a avut utilizarea calculatorului in locul benzii perforate, ajungandu-se la comanda numerica, cu ajutorul calculatorului, a masinilor unelte.
La inceputul anilor 1960 sunt realizati si primii roboti industriali. Fabricarea si utilizarea robotilor a fost facilitata de rezolvarea anterioara a unor probleme tehnice, indispensabile pentru functionarea robotilor:
Problema manipularii pieselor la distanta, cu ajutorul mecanismelor articulate, denumite telemanipulatoare. Dezvoltarea telemanipulatoarelor a fost impusa de necesitatea manipularii materialelor radioactive, extrem de nocive pentru organismele vii, in procesul utilizarii energiei nucleare. In 1947 a fost construit primul telemanipulator cu servo-actionare electrica, in care operatorul uman nu
controla forta de prindere. In 1948 a fost introdusa legatura inversa (feed-back), realizandu-se astfel telemanipulatorul cu "bucla inchisa". Fabricarea manipulatoarelor cu operator uman a implicat rezolvarea unor probleme esentiale pentru proiectarea si realizarea unui robot: modelarea cu ajutorul mecanismelor a miscarilor bratului si antebratului omului (mecanisme de pozitionare); modelarea cu ajutorul mecanismelor a miscarilor a miscarilor de orientare specifice incheieturii mainii omului (mecanisme de orientare); modelarea miscarilor degetelor mainii, specifice operatiilor de prindere.
Problema automatizarii masinilor unelte prin intermediul comenzii numerice. A permis stapanirea comenzii incrementale a miscarilor si a pozitionarii de mare precizie, prin dezvoltarea de servo-motoare, servo-comenzi si senzori de pozitie/deplasare.
Problema automatizarii calculelor si a controlului cu ajutorul calculatoarelor electronice.
Iata cateva repere semnificative in evolutia roboticii:
- 1961 - instalarea primului robot industrial - UNIMATE la General Motors. Si in urmatoarele decenii industria automobilului a fost forta motrice pentru productia robotilor industriali. Astfel, in 2002, in Germania erau 120 de roboti la fiecare 10.000 de angajati, dar in industria automobilului proportia era de 1 robot la 10 muncitori productivi.
- 1963 - Cercetatorii de la Rancho Los Amigos Hospital din California au construit "Rancho Arm" pentru sprijinirea persoanelor handicapate. Avea 6 articulatii, dispunea de gradele de mobilitate ale mainii umane si a deschis drumul spre construirea robotilor antropomorfi.
- Studentul in constructia de masini, Victor Scheinman, a realizat la Stanford Artificial Intelligence Laboratory, robotul Stanford pentru microchirurgie. Avea 6 grade de mobilitate si era primul robot conceput pentru comanda cu calculatorul. A fost precursorul unor roboti industriali remarcabili, ca PUMA (Programmable Universal Manipulator for Assembly), robotul cu cel mai mare succes de piata
pana in prezent.
- 1979 - Robotul mobil Stanford Cart a reusit prima parcurgere a unei incinte mobilate cu scaune. Se baza pe o camera video, montata pe o sanie, si isi stabilea drumul pe baza de grafuri si algoritmi de cautare. Primele masini mobile reprezentative au fost insa "broastele testoase" Elsie si Elmer ale englezului Grey Elmer, in 1950, capabile sa identifice o priza electrica si sa-si incarce bateriile.
- 1973 - La Universitatea Waseda din Tokyo a fost realizat primul robot umanoid in marime naturala - Wabot-1. Japonezii sunt cei mai ferventi sustinatori ai dezvoltarii unor roboti cu aspect umanoid, care sa fie acceptati mai usor ca "parteneri" in servicii, munci casnice, ajutorarea persoanelor handicapate. Exemple semnificative: robotii P3 (Honda) si Asimo (Advanced Step in Innovative Mobility). Acesta din urma, realizat in 2001, are o inaltime de 1,20 m, o greutate de 43 kg, iar prin modificarea centrului sau de greutate se poate deplasa si in curbe.
- Doi roboti umanoizi renumiti de la M.I.T. - Kismet ("Soarta"), are buze de cauciuc, urechi rozalii, care arata ca doua servetele impaturite, ochi mari, in care sunt montate camere miniaturale si poate vedea, auzi si vorbi cu ajutorul unui sintetizator; Cog (Cognition = Cunoastere), este constituit dintr-un trunchi de robot, care poate prinde obiecte si le poate aduce in dreptul celor doi ochi, materializati prin doua camere video.
Cateva dintre realizarile din domeniul roboticii par a fi desprinse din science-fiction si
ele nu ar fi fost posibile fara dezvoltarea spectaculoasa a tehnicii de calcul si, in special, a microelectronicii, care este un pilon de baza al sistemelor. In finalul acestui paragraf se vor puncta cateva dintre principalele etape ale dezvoltarii tehnicii de calcul.
Prelucrarea automata a informatiilor a fost revolutionata de aparitia si dezvoltarea calculatoarelor electronice numerice. Prima generatie a fost realizata cu tuburi electronice, primul calculator din aceasta generatie fiind ENIAC (Electronical Numerical Integrator and Calculator), construit intre 1942-1946 la Universitatea Pennsylvania. A urmat generatia a doua, cu tranzistoare, intre anii 1950-1960, pentru ca nasterea microelectronicii sa genereze salturi revolutionare, marcate de urmatoarele etape semnificative:
- 1959 - anul de nastere a microelectronicii; primul circuit integrat (TEXAS INSTRUMENTS);
- 1971 - producerea primului microprocesor de 4 biti - INTEL-4004;
- 1974 - aparitia microprocesoarelor de 8 biti - INTEL-8080;
- 1978 - producerea primului microcontroller;
- 1981 - primul calculator personal IBM PC-XT;
- 1985 - lansarea sistemelor software AUTOCAD, dBASE III, IV si a unor noi limbaje de programare de nivel superior: PASCAL, C;
- 1986 - limbaje de programare destinate rezolvarii problemelor de inteligenta artificiala: LISP, PROLOG; procesare in limbaj natural;
- 1987- explozie tehnologica in arhitectura hardware ® lansarea calculatoarelor
echipate cu hard-disk-uri.
Succinta prezentare a evolutiei sistemelor tehnice, de la sisteme pur mecanice la sisteme mecatronice, permite evidentierea catorva concluzii:
1) Integrarea electronicii si a tehnicii de calcul a condus la simplificarea substantiala a componentelor mecanice si la sisteme mai ieftine. Parti mecanice au fost inlocuite cu componente electronice, mai ieftine, mai fiabile si mai usor de intretinut, intrucat pot facilita auto-diagnoza. Aceste sisteme sunt mai precise, intrucat precizia nu se bazeaza pe rigiditatea si stabilitatea mecanica, ci pe sisteme electronice de masurare si reglare. Simplificarea constructiei mecanice a fost facilitata si de comanda descentralizata, cu ajutorul microcalculatoarelor, a actionarilor electrice, ca, de exemplu, la masini de scris, masini de cusut, manipulatoare cu mai multe cuple.
2) In perspectiva unor constructii mai usoare, s-au realizat sisteme relativ elastice, cu o amortizare mecanica redusa, dar la care o comanda cu reactie adecvata, bazata pe electronica, senzori si actuatori adecvati, asigura o amortizare electronica. Exemple: roboti elastici, transmisii de putere elastice, macarale uriase, sisteme hidraulice, conducte si constructii in spatiul cosmic.
3) Introducerea unor sisteme de reglare pentru pozitie, viteza, forta etc. permite nu numai mentinerea in limite rezonabile de precizie a marimilor programate, dar si obtinerea unei comportari quasi-liniare, chiar daca sistemul mecanic comandat este neliniar.
Copyright © 2025 - Toate drepturile rezervate