|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
ALGORITMI EVOLUATI DE REGLARE
MODELAREA DINAMICA A AMORTIZOARELOR SEMI-ACTIVE CU FLUID ELECTRO-/MAGNETO-REOLOGIC
Determinarea unor algoritmi eficienti pentru controlul amortizoarelor cu fluid ER / MR, utilizand ecuatia Herschel-Bulkley pentru determinarea unui model ce poate asigura predictia comportamentului amortizoarelor cu fluid ER / MR la varierea intensitatii campului.
Avantajul modelului propus: depinde doar de geometria si de proprietratile materialului din care este fabricat dispozitivul.
Dispozitivele semi-active de control a vibratiilor primesc tot mai multa atentie intrucat imbina avantajele atat ale sistemelor pasive cat si a celor active. Cateva exemple: amortizoare cu fluid cu orificiu variabil, dispozitive ce asigura varierea vascozitatii, izolatoare de frictiune si amortizoare cu fluide MR sau ER cu varierea intensitatii campului. La acestea din urma activarea campului magnetic / electric provoaca schimbarea "dramatica" (a se citicat se poate de rapida, brusca) a vascozitatii trecand din stare lichida intr-o stare apropiata solidului (semi-solida) si invers in cateva milisecunde. Rezultatul este un amortizor controlabil care e capabil sa dezvolte forte mari.
Ce sunt fluidele electro-/magneto-reologice?
Materialele electroreologice (ER) au fost descoperite in 1949, de catre W.M. Winslow. Materialele ER sunt solutii de particule coloidale, polarizabile, cu dimensiuni de ordinul a 1-100 μm, in solventi izolatori, cu constanta dielectrica ridicata.
La aplicarea unui camp electric puternic, de ordinul kV/m, materialele ER , aflate in curgere, isi modifica proprietatile reologice (vascozitate, plasticitate, elasticitate) formand lanturi.
Se constata ca particulele au tendinta de-a forma lanturi chiar si la intensitati reduse ale campului electric aplicat. Odata cu cresterea intensitatii campului, lanturile sunt forfecate din ce in ce mai greu si atunci cand viteza particulelor scade la zero, lanturile devin perpendiculare pe suprafetele electrozilor.
Cresterea vascozitatii, cu pana la trei ordine de marime, este datorata energiei consumate pentru disocierea lanturilor de particule. Reluarea curgerii are loc numai atunci cand tensiunea de forfecare aplicata depaseste tensiunea de curgere dinamica. Din acel moment, in continuare, materialul ER se comporta ca un fluid obisnuit, cu vascozitate constanta.
Asadar materialele ER au comportamente diferite: in regim precurgere si in regim post-curgere. Majoritatea aplicatiilor sunt cu comportare la forfecare controlabila in regim post-curgere.
Regimul pre-curgere exista numai la deformatii mici, γ < γy. In regim post-curgere, se observa o dependenta liniara a tensiunii de forfecare (τ) de viteza de deformare (γÿ), conform relatiei:
![]()
unde τy este tensiunea de curgere dinamica, care este puternic dependenta de campul electric aplicat (E1 < E2 < E3 => τy1 < τy2 < τy3); η - vascozitatea plastica care este putin dependenta de campul electric.
Aplicatiile materialelor ER sunt de doua tipuri: (i) dispozitive controlabile si (ii) structuri adaptive.
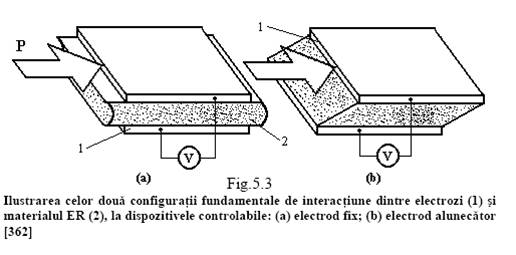
Dispozitivele controlabile opereaza cu vascozitate constanta, dupa un principiu de functionare bazat pe doua configuratii fundamentale, de interactiune a materialului ER cu electrodul: 1 - cu electrod fix si 2 - cu electrod mobil. Aceste doua configuratii sunt ilustrate schematic in Fig.5.3.
Dispozitivele controlabile, bazate pe configuratia cu electrod fix, din Fig.5.3(a), contin electrozi stationari, intre care curge materialul ER, cu un anumit flux, produs de un gradient de presiune.
La configuratia cu electrod alunecator, electrozii sunt paraleli si cel putin unul dintre ei se poate deplasa tangential, sub efectul unei forte de forfecare a materialului ER, ca in Fig.5.3(b). Alunecarea este controlata prin viteza electrodului alunecator si prin forta de forfecare a materialului, exercitata intre electrozi.
Structurile adaptive au proprietati reologice ajustabile datorita incorporarii a cel putin un component ER. Acesta functioneaza in regim precurgere, fiind supus la doua tipuri de solicitari: forfecare sau extensie. Structurile adaptive au capacitatea de a detecta stimulii externi si de a reactiona astfel incat comportamentul lor sa se incadreze intre anumite criterii de performanta prestabilite. In general, controlul structurilor adaptive se poate realiza in mod activ prin reducerea vibratiilor structurii cu ajutorul unui actuator extern care introduce energie suplimentara in sistem sau in mod semiactiv, prin modificarea rigiditatii si a proprietatilor de amortizare ale structurii cu ajutorul componentului ER..
Un exemplu de structura adaptiva cu control semiactiv se obtine prin incorporarea unui miez din material ER intr-o placa de elastomer. Caracteristicile acestei structuri sunt ilustrate in Fig.5.4.
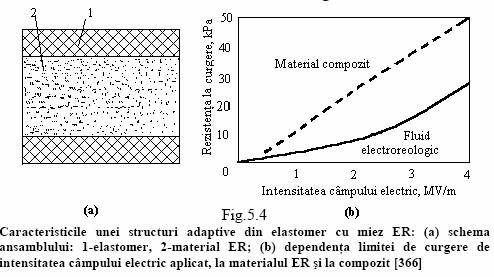
Placa de elastomer din Fig.5.4(a) are un miez ER cu o grosime de 1,8 mm, straturile exterioare fiind de 0,46 mm. Limita de curgere a materialului ER (τy) depinde de intensitatea campului electric (E) conform relatiei:
τy = aE + bE2
unde a = 0,8867 si b = 0,7833 sunt constante determinate experimental. Valoarea uzuala a forfecarii de curgere este γy ≈ 1 %.
Relatia (5.2) a fost reprezentata grafic in Fig.5.4(b). Vascozitatea materialului ER este η = 0,25 Pa·s. Elastomerul in care s-a incorporat miezul ER are modulul de forfecare G = 12 MPa si coeficientul Poisson μ = 0,4.
In cadrul celor doua categorii principale de aplicatii ale materialelor ER se regasesc:
1 - dispozitive controlabile tip: supapa, suport pentru motoare si mecanisme; frana si ambreiaj; amortizor, etc.
2 - structuri adaptive tip: poduri, blocuri, etc.
Amortizoarele controlabile pot fi utilizate intr-o gama larga de aplicatii, datorita capacitatii lor de a-si modifica raportul dintre viteza si limita de curgere. In anumite aplicatii se impune ca amortizoarele sa poata dezvolta o gama larga de forte controlabile. Astfel, au fost dezvoltate amortizoare cu cilindri concentrici, multipli, ce pot fi conectati in paralel, in serie sau in moduri combinate. Variatia viteza-forta, a dispozitivului controlabil, este dependenta de modul in care se realizeaza legatura dintre traseele hidraulice ale amortizorului. In Fig.5.7 este prezentata schematic o configuratie tipica de amortizor controlabil, cu cilindri concentrici.
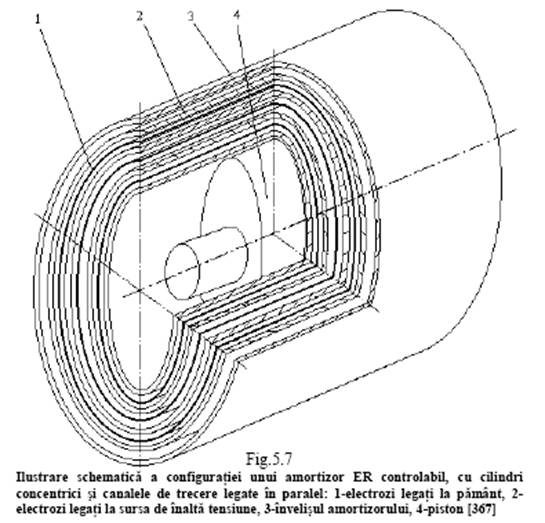
Se observa ca electrozii sunt legati in mod alternativ, fie la pamant (1) fie la sursa de inalta tensiune (2). Invelisul amortizorului (3) reprezinta electrodul exterior, legat la pamant. Atunci cand sunt alimentati, electrozii formeaza un set de condensatori paraleli. Canalele de trecere a fluidului printre electrozi pot fi conectate si altfel, decat in paralel. Legarea in paralel asigura cel mai mare interval de forte controlabile. Performantele amortizorului depind de: marimea spatiului dintre electrozi; grosimea electrozilor; razele pistonului, arborelui si invelisului si lungimea amortizorului. Aceasta configuratie de amortizor asigura o compactitate mai mare, in raport cu amortizoarele clasice.
In mod curent, amortizoarele ER controlabile clasice, ilustrate in Fig.5.8, au fost dezvoltate cu configuratii cu electrod fix sau alunecator.
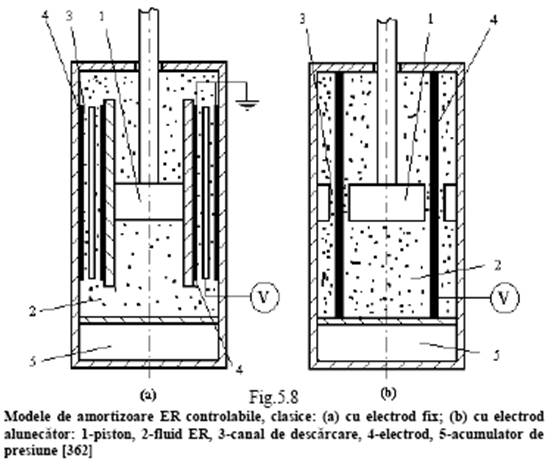
La amortizorul cu electrozi ficsi, din Fig.5.8(a), forta de amortizare a pistonului (1) este controlata prin pierderea de presiune din canalele de descarcare (3) prin care este fortat sa treaca fluidul ER (2). Electrozii (4) sunt placi fixe.
La amortizorul cu electrozi alunecatori, ilustrat in Fig.5.8(b), forta de amortizare este controlata prin modificarea rezistentei la frecare a fluidului ER, la trecerea prin canalele de descarcare. In acest caz, pistonul (1) joaca rol de electrod alunecator.
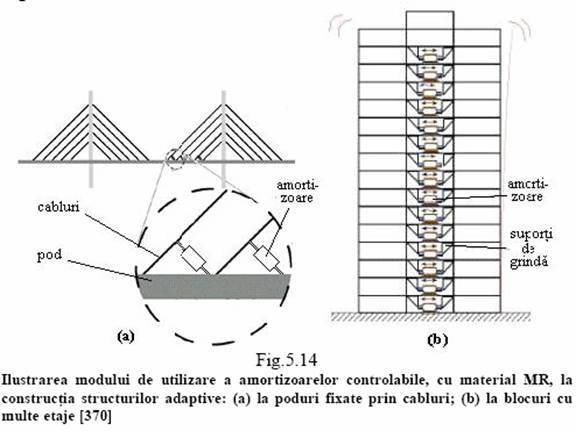
Structurile adaptive se obtin prin incorporarea amortizoarelor ER in zonele concentratoare de eforturi. Rolul materialelor ER este de a controla si modifica frecarea din lagarele amortizoarelor, regland complianta constructiilor mari (blocuri, poduri, etc.) din zonele cu activitate seismica ridicata [362].
Materialele magnetoreologice (MR) sunt suspensii stabile de particule feromagnetice ultrafine, cu dimensiuni de ordinul a 0,05-10 μm, intr-un mediu fluid purtator, izolator.
La aplicarea unui camp magnetic, materialele MR au capacitatea de a-si modifica vascozitatea cu pana la sase ordine de marime, datorita formarii lanturilor de particule aliniate. Fenomenul este ilustrat in Fig.5.9.
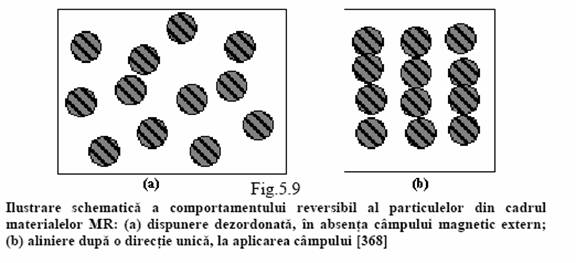
Formarea lanturilor "de perle", cum mai sunt numite sirurile de particule MR aliniate din Fig.5.9(b), este insotita de modificarea proprietatilor reologice (elasticitate, plasticitate, vascozitate), magnetice, electrice, termice, acustice, etc. insa principalul efect este cresterea vascozitatii aparente. La indepartarea campului magnetic, particulele revin la starea dezordonata din Fig.5.9(a) [368].
Materialele MR au proprietati superioare materialelor ER, din urmatoarele puncte de vedere:
1 - au rezistenta la curgere mai ridicata
2 - au stabilitate mai mare la impuritatile si elementele de contaminare, care apar in mod uzual in timpul producerii si utilizarii materialului;
3 - consumul energetic este mai redus (puterile necesare, mai mici de 50 W, putand fi asigurate, la tensiuni de 12-24 V si intensitati de 1-2 A, chiar si de bateriile electrice).
Datorita atat superioritatii lor fata de materialele ER cat si proprietatilor lor reologice usor-controlabile, materialele MR sunt utilizate cu succes in aplicatii, la controlul socurilor si vibratiilor.
Cele mai raspandite dispozitive controlabile cu materiale MR sunt amortizoarele. Cateva tipuri de amortizoare cu materiale MR sunt prezentate schematic in Fig.5.12.
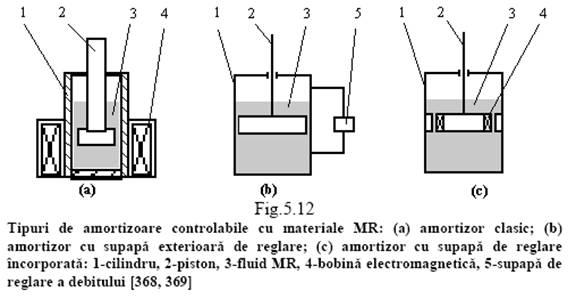
Amortizorul MR clasic, din Fig.5.12(a), are dezavantajul ca efectul electromagnetului (4) trebuie sa acopere tot diametrul cilindrului, deci o regiune destul de mare, ceea ce necesita un camp magnetic foarte puternic [368]. Variantele de amortizoare din Fig.5.12(b) si (c) folosesc o valva de reglare a debitului care, din punct de vedere functional, este o rezistenta hidraulica controlata. Viteza de trecere a fluidului MR (4) prin supapa (5) este reglata prin intermediul unui camp magnetic perpendicular pe directia fluxului. Supapa de control al debitului este un ansamblu de cilindri si inele coaxiale, la exteriorul carora s-a infasurat o bobina din sarma de cupru. Solenoidul astfel format genereaza un camp magnetic perpendicular pe axa supapei, care poate atinge, de exemplu, o intensitate de 300 kA/m, la un curent de 1,2 A si un numar de 1000 de spire.
Amortizoarele controlabile cu fluid MR sunt candidati foarte promitatori pentru sistemele de reglare a rigiditatii structurilor adaptive, in special in cazurile cu risc ridicat de expunere la calamitati naturale cum ar fi furtunile mari sau cutremurele. Un astfel de amortizor pentru protectie antiseismica, produs de firma Lord, este schitat in Fig.5.13.
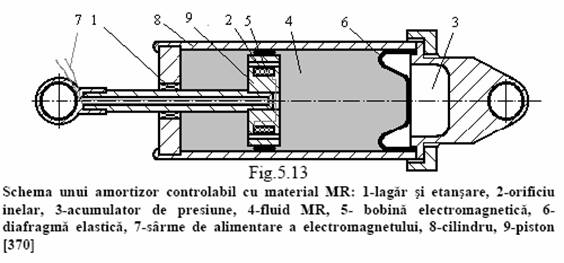
Cursa amortizorului este de ± 2,5 cm. Cilindrul principal (8) are un diametru de 3,8 cm si contine pistonul (9), acumulatorul de presiune (3) si fluidul MR (4). Campul magnetic este produs de bobina (5), plasata pe piston. Puterea absorbita la functionarea amortizorului este mai mica de 10 W. Timpul de reactie al ansamblului a fost mai mic de 10 ms.
Aceste fluide prezinta o comportare neliniara la aplicarea unui camp electric, respectiv magnetic. Aceste fluide au 2 regimuri: unul pre-curgere si celalalt post-curgere. La marea majoritate a dispozitivelor comportarea post-curgere a acestor fluide este dominanta.
Propun un model teoretic si il validez prin comparatia cu rezulatele experimentale obtinute cu un amortizor cu fluid MR la Universitatea din Nevada, Reno.
Raportul volum de fluid la volumul ocupat de piston e constant pe toata perioada cursei. Supapele controlabile cu fluid MR sunt integrate in piston.
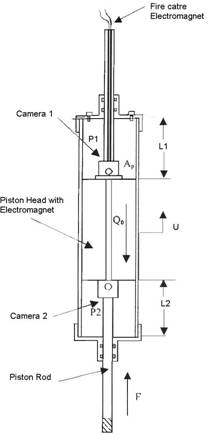
Fig.1: Schema amortizorului cu fluid MR
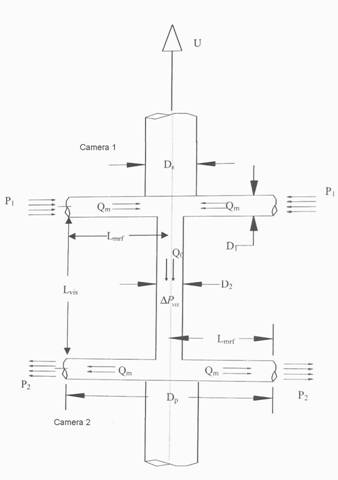
Fig 2: Calea de curgere a fluidului MR
Ecuatia de conservare masei de fluid este:
![]() (1)
(1)
unde: ρ = densitatea fluidului
m = masa de fluid
V = volumul
Qi = debitul de intrare
Qo = debitul de iesire
Luand in calcul si cumpresia fluidului avem:
![]() (2)
(2)
unde: P = presiunea
β = coeficientul de compresie al fluidului
Combinanad ecuatiile (1) si (2) si presupunanad ca
![]() se obtine:
se obtine:
![]() (3)
(3)
Aceasta ecuatie reprezentand ecuatia de conservare a masei care tine cont si de compresia fluidului. Pentru amortizorul in discutie Qi = 0 si deci ecuatia (3) pentru cele 2 camere devine :
 (4)
(4)
unde ![]() si
si ![]() (5)
(5)
U fiind deplasarea pistonului, Ap aria efectiva a pistonului, iar β1 si β2 coeficientii de compresie alea fluidelor din camerele 1 si respectiv 2.
este un coeficient ce ceracterizeaza compresibilitatea unui fluid. Este sensibil la numerosi factori ai ambientului (temperatura, presiune, debit volumic, continutul de aer). La temperatura camerei, cunoscand faptul ca volumul de aer continut intr-o unitatea de volum de ulei si presupunand ca este vorba de un container perfect rigid avem:
![]() (6)
(6)
unde ![]() este coeficientului de compresie al uleiului
este coeficientului de compresie al uleiului
![]()
![]() este valoarea medie a
presiunii (presiunea medie)
este valoarea medie a
presiunii (presiunea medie)
La 1% de aer continut in fluid ![]()
La 0.01% de aer continut in fluid ![]()
Se observa deci ca aerul continut in fluid va reduce valoarea coeficientului de compresie.
In aplicatiile reale, aerul este mereu prezent in sistem. Daca se neglijeaza acest lucru, eficienta poate scadea dramatic.
In acesc caz se poate totusi presupune ca ![]()
Considerand ![]() putem rescrie ecuatiile (4) si (5) astfel:
putem rescrie ecuatiile (4) si (5) astfel:
 (7)
(7)
unde ![]() = viteza de deplasare
a pistonului.
= viteza de deplasare
a pistonului.
Ecuatia (7) se poate rezolva daca purtem determina Qo in funtie de P1 si P2.
In funtie de calea de curgere a fluidului prin
piston (asa cum se arata in fig.2) , caderea de presiune ![]() intre camerele 1 si 2 depinde puternic de caderea de presiune
intre camerele 1 si 2 depinde puternic de caderea de presiune
![]() datorata vascozitatii
fluidului prin canalul central si de caderea de presiune
datorata vascozitatii
fluidului prin canalul central si de caderea de presiune ![]() pe supapa cu fluid MR normala pe axa de deplasare.
pe supapa cu fluid MR normala pe axa de deplasare.
Cand fluidul MR e activat, caderea de presiune
vascoasa ![]() este mult mai mica decat
este mult mai mica decat ![]() . Deci,
. Deci, ![]() poate fi neglijata. Astfel debitul volumic prin supapele MR
poate fi exprimat ca o funtie de caderea de presiune
poate fi neglijata. Astfel debitul volumic prin supapele MR
poate fi exprimat ca o funtie de caderea de presiune ![]() si rezulta:
si rezulta:
 (8)
(8)
unde ![]() ,k,n=parametri Herschel-Bulkley
ai fluidului, iar
,k,n=parametri Herschel-Bulkley
ai fluidului, iar ![]() = tensiunea de curgere
dinamica ce depinde de campul extern.
= tensiunea de curgere
dinamica ce depinde de campul extern.
Pentru geometria amortizorului dat si presupunanad ca nu are loc compresia fluidului prin canalul central, debitul volumic total este :
Qo=N·Qm
unde N = numarul de supape cu fluid MR.
Caderea de presiune ![]() poate fi obtinuta din
ecuatiile (7), (8) si (9). Caderea de presiune
poate fi obtinuta din
ecuatiile (7), (8) si (9). Caderea de presiune ![]() contribuie cu o forta
vascoasa la forta totala de amortizare, astfel incat caderea toatala de
presiune pe suprafata pistonului poate fi exprimata astfel:
contribuie cu o forta
vascoasa la forta totala de amortizare, astfel incat caderea toatala de
presiune pe suprafata pistonului poate fi exprimata astfel:
![]() (10)
(10)
Unde ![]() = forta defrictiune ce
apare in timpul amortizarii.
= forta defrictiune ce
apare in timpul amortizarii.
Pentru un fluid Newtonian
Poiseuille ce curge printr-o conducta avem ![]() unde
unde ![]()
Rezulta : 


Fig. 3: Schema Simulink pentru modelul procesului
In primul bloc subsistem se calcuceaza Qm avand ca date de intrare τy si ΔPm (pe ΔPm l-am initializat ), in cel de-al doilea calculez ΔPm folosind Qm si U initializat.
Fig. 4: Subsitemul pentr determinarea lui Qm
Fig.5 : Subsistemul pentru determinarea lui ΔPm
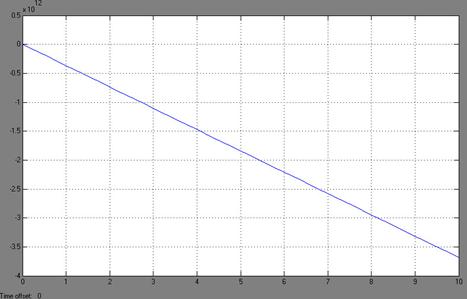
Fig. 3: Forta de amortizare pentru deplasare de 6 cm.
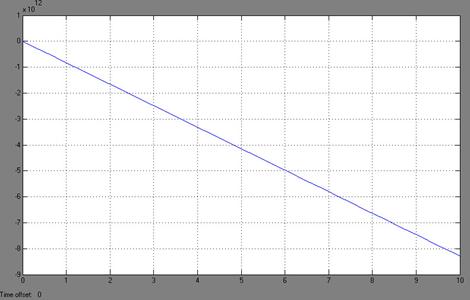
Fig. 4: Forta de amortizare pentru deplasare de 4 cm.
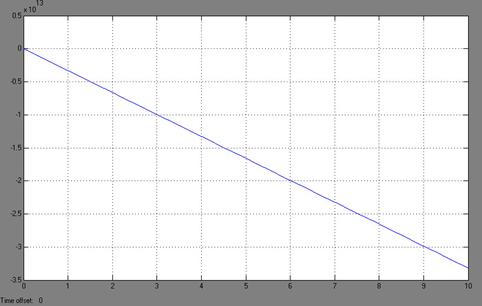
Fig. 5: Forta de amortizare pentru deplasare de 2 cm.
Se observa ca forta de amortizare F creste in modul (adica scade in valoare absoluta) pe masura ce deplasarea pistonului se reduce.
Copyright © 2025 - Toate drepturile rezervate