|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
DETERMINAREA MOMENTULUI DE INERTIE PRIN METODA SUSPENSIEI PRIN TREI FIRE
Introducere teoretica
Alegand un SC cu originea O pe axa de rotatie, sa calculam energia cinetica de rotatie a rigidului:
![]()
Tinand seama ca vitezele particulelor sunt:
![]()
![]()
unde sunt vectorii de pozitie si Rk distantele particulelor mk pana la axa de rotatie, obtinem deci:
![]()
unde
![]()
![]()
este momentul de inertie al rigidului fata de axa de rotatie (a fost introdus de Ch. Huygens in 1673).
In cazul distributiei continue de masa, suma de mai sus se inlocuieste cu integrala:
![]()
Z
![]()
![]()
![]()
![]()
![]()
![]() unde R este
distanta elementului d de masa dm=rdv pana la axa de rotatie.
unde R este
distanta elementului d de masa dm=rdv pana la axa de rotatie.
mk
![]()
![]() Fig.1
Fig.1
|
y |
x
Momentul de inertie este o marime aditiva in sensul ca este egala cu suma momentelor de inertie ale particolelor componente ale corpului. Momentul de inertie al unui punct material fata de o axa este egal cu produsul dintre masa punctului material si patratul distantei sale pana la axa mR2 (vezi fig. 2).
![]() (6)
(6)
Vom nota cu Rk distantele pana la axa si cu rk distantele pana la pol.
Se numeste raza de inertie sau de giratie fata de o axa, distanta Rg definita prin relatia:
(7)
(8)
adica raza de inertie Rg este distanta de la axa data unde ar trebui concentrata toata masa corpului pentru a da acelasi moment de inertie fata de aceea axa.
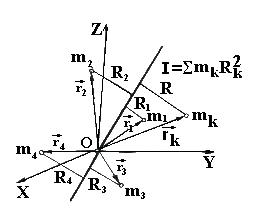
Figura 2
Dimensiunile momentului de inertie sunt:
[I]SI=[m]SI=[R2]SI=ML2=kgm2 in S.I. (9)
![]() Comparand expresiile energiei cinetice de
translatie si de rotatie:
Comparand expresiile energiei cinetice de
translatie si de rotatie:
(10)
se vede ca rolul masei din miscarea de translatie il joaca in miscarea de rotatie momentul de inertie I fata de axa de rotatie.
Momentul de inertie fata de o axa este o masura a inertiei corpului la miscarea de rotatie in jurul acelei axe.
TEOREMA LUI STEINER (cunoscuta de Huygens si demonstrata de Euler in 1749) se aplica in cazul cand avem o axa necentrala (exterioara) si se enunta astfel: momentul de inertie I fata de o axa oarecare este egal cu momentul de inertie I0 fata de o axa paralela centrala plus produsul dintre masa corpului patratul distantei dintre axe:
I = I0 + m R02 (11)
Teorema lui Steiner este analoaga teoremelor de descompunere fata de CM:
Momentul de inertie I fata de o axa oarecare este egal cu momentul de inertie orbital sau extern al corpului presupus redus la un punct material in CM (mR02) plus momentul de inertie propriu sau intern I0 fata de o axa centrala, paralela cu axa data.
Mai general: matricea momentelor de inertie I fata de un SC oarecare este egala cu matricea momentelor de inertieorbitale Icm ale corpului presupus redus la un punct material in CM, plus matricea momentelor de inertie proprii I0 fata de un SC central paralel cu cel dat:
I = Icm + I0
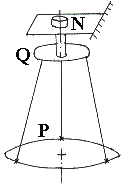
Momentul inertiei se determina prin metoda suspensiei prin trei fire utilizand o platforma circulara P de raza R si masa M suspendata prin trei fire, plasate simetric, de o alta platforma circulara de raza r<R (Fig.3).
Platforma P poate efctua oscilatii de torsiune in jurul axei sale verticale de simetrie. In felul acesta ea isi schimba periodic inaltimea. Cand ajunge la inaltimea maxima h, fata de inaltimea de echilibru, energia sa potentiala este:
Ep = M g h (12)
Trecand prin pozitia de echilibru, ea va avea o energie cinetica egala cu: Ec = ½ I w (13)
unde I este momentul de inertie si w este viteza unghiulara.
Din legea conservarii energiei se poate scrie:
½ I w = M g h (14)
![]() Unghiul de
rotatie al platformei la momentul t este :
Unghiul de
rotatie al platformei la momentul t este :
(15)
T fiind perioada si a amplitudinea unghiulara.
Viteza unghiulara se afla prin derivarea in raport cu timpul:
![]()
(16)
Viteza unghiulara maxima este:
![]()
(17)
Inlocuind (17) in (16) si observand (Fig.4), avem:
![]()
(18)
Pentru ca:
(BC)2=(AB)2-(AC)2=l2-(R-r)2
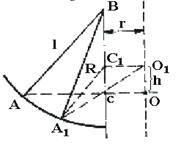 si
si
(BC1)2=(BA1)2-(A1C1)2 =
= l2-(R2+r2-2R r cosa
obtinem:
(19)
la valori mici ale amplitudinii se pot facedoua aproximari:
sin a a si BC+BC1
In consecinta inaltimea h se poate scrie:
![]()
(20)
care inlocuita in relatia (14) ne da dupa simplificari, expresia pentru momentul de inertie al platformei neincarcate:
![]()
(21)
Daca platforma este incarcata cu un corp de masa m, momentul de inertie al platformei incarcate va fi:
![]()
(22)
Momentul de inertie al corpului de pe platforma se calculeaza cu relatia:
![]()
(23)
In acest mod se poate verifica si teorema lui Steiner, daca pe platforma se aseaza doua corpuri identice de masa m, atunci momentul de inertie al ansamblului astfel format se afla cu relatia:
![]()
(24)
![]()
Daca distanta de la centrele celor doua corpuri pana la axa de simetrie este d se verifica relatia:
![]() (25)
(25)
MONTAJUL EXPERIMENTAL
Este format dintr-o platforma circulara P de raza R si de masa M care este suspendata simetric de trei fire de o alta platforma circulara cu raza r< R (vezi Fig.3).
Dorim sa determinam momentul de inertie al unui corp asezat pe platforma. Pentru aceasta se pornesc oscilatiile prin imprimarea unei mici rotatii platformei superioare cu ajutorul butonului N. La inceput se masoara perioada platformei neincarcate: T0=t0/n unde t0 este durata a n oscilatii (n 20). Apoi se pune corpul pe platforma astfel ca centrul sau de greutate sa se afle pe axa de simetrie a platformei si se determina perioada T=t/n. Cu relatia (21) se determina momentul de inertie al platformei neincarcate, iar cu relatia (22) se determina momentul de inertie al platformei incarcate cu corpul de masa m.
Momentul de inertie al corpului se determina cu relatia (23). Identic se poate verifica si teorema axelor paralele sau teorema lui Steiner, insa de data aceasta se lucreaza cu doua corpuri identice care se aseaza pe platforma in pozitie simetrica astfel incat sa nu se incline platforma. Momentul de inertie al ansamblului celor doua corpuri se afla cu relatia (24). Daca distanta centrelor de masa a celor doua corpuri pana la axa de simetrie este d, trebuie sa fie verificata relatia (25).
Pentru determinarea momentelor de inertie cu relatiile de mai sus se vor intocmii urmatoarele tabele de valori:
![]()
![]() Nr.
det. M(kg) R(cm) r(cm) l(cm) m(kg) t0(s) n(osc) T0(s) I0(kg m2)
Nr.
det. M(kg) R(cm) r(cm) l(cm) m(kg) t0(s) n(osc) T0(s) I0(kg m2)
1.
2. 0,67
![]()
Tabelul de mai sus se completeaza in continuare cu urmatorul tabel:
![]()
![]() Nr.
det. M(kg) R(cm) r(cm) l(cm) m(kg) t (s) n(osc) T (s) I (kg m2)
Nr.
det. M(kg) R(cm) r(cm) l(cm) m(kg) t (s) n(osc) T (s) I (kg m2)
1.
2. 0,67
![]()
5. Concluzii :
se trag concluzii cu privire la valorile momentelor de inertie astfel obtinute si la valorile lor
Copyright © 2025 - Toate drepturile rezervate