|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
Sisteme de conducere a motoarelor sincrone cu magneti permanenti
Principial, sistemele de control ale motoarelor sincrone cu magneti permanenti MSMP se pot clasifica in doua mari categorii: sisteme in bucla deschisa si sisteme autopilotate.
Controlul
in bucla deschisa (v. figura 1) presupune comanda
externa a frecventei de lucru a convertorului, fara ca
aceasta sa fie influentata in vreun fel de motor. Pentru
aceasta situatie, motorul sincron cu magneti permanenti isi
conserva proprietatile tipice. Viteza sa poate fi
modificata prin variatia frecventei statorice impuse ![]() fiind
independenta de sarcina. Masina este susceptibila la
oscilatii si poate iesi din sincronism.
fiind
independenta de sarcina. Masina este susceptibila la
oscilatii si poate iesi din sincronism.
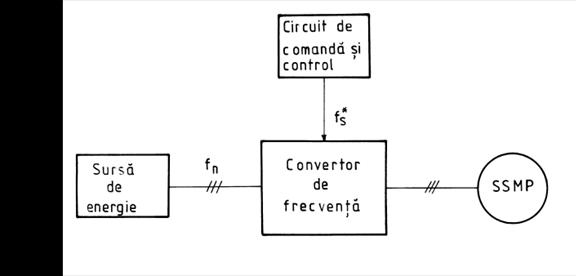
Fig. 1. Controlul in bucla deschisa a motoarelor sincrone
cu magneti permanenti.
În situatia sistemelor autopilotate (v. figura 2), frecventa de lucru a motorului este controlata chiar de masina. Acest lucru este posibil prin montarea pe rotorul MSMP a unui traductor de pozitie de tip resolver sau encoder. Pe baza pozitiei masurate, circuitul de comanda si control prescrie frecventa de lucru necesara masinii. Faptul ca motorul este autopilotat conduce la modificari esentiale ale caracteristicilor SAE. Astfel, masina nu mai este susceptibila la oscilatii si nici nu mai exista pericolul iesirii acesteia din sincronism. Caracteristicile sale mecanice sunt similare cu cele ale motorului de c.c.
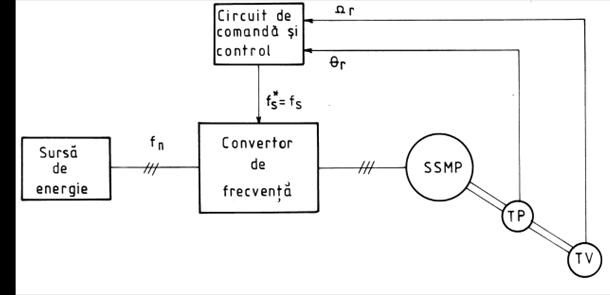
Fig. 2. Controlul MSMP in regim autopilotat.
Observatie: În cazul sistemul de control in bucla deschisa se cade peste motorul sincron cu magneti permanenti clasic MSMP iar in situatia sistemelor autopilotate se ajunge la motoarele sincrone cu magneti permanenti autopilotate MSMPAT comandate cu curenti sinusoidali. Cu alte cuvinte, un MSMP poate sa functioneze in regim autopilotat prin alimentarea fazelor statorului cu un sistem echilibrat trifazat de curenti care sunt variati sinusoidal in functie de pozitia rotorului.
Metode de control ale motoarelor sincrone cu magneti permanenti
Metodele de control ale motoarelor sincrone cu magneti permanenti pot fi clarificate in:
controlul in bucla deschisa;
controlul in bucla inchisa cu urmatoarele variante: metode de control vectorial in curent, metode de control vectorial cu orientare dupa camp si metode de control vectorial direct in cuplu si flux.
. Controlul in bucla deschisa al motorului sincron cu magneti permanenti
În cazul controlului in bucla deschisa, convertorul static de frecventa care asigura alimentarea motorului este comandat extern, fara nici o legatura cu masina. SAE poate fi lipsit de traductoare de pozitie. Sistemul de control (v. figura 3) se bazeaza pe un algoritm de control tensiune - frecventa in bucla deschisa.
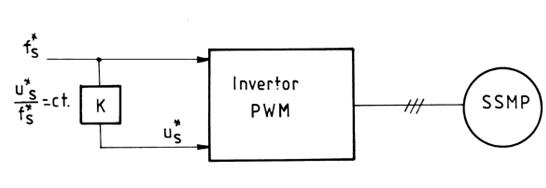
Fig. 3. Schema bloc pentru controlul in bucla deschisa.
Se observa ca echipamentul de control este similar cu cel folosit in situatia motoarelor de inductie.
2. Controlul vectorial in curent al motorului sincron cu magneti permanenti
Schema de principiu pentru controlul vectorial in curent al motorului sincron cu magneti permanenti este prezentata in figura 4. Marimile sunt exprimate in unitati relative.
Aceasta metoda
de conducere presupune criterii optimale de prescriere a curentului statoric ![]() in vederea
obtinerii unui cuplu prescris m*.
in vederea
obtinerii unui cuplu prescris m*.
Circuitul de forta contine convertorul static de frecventa, compus dintr-un redresor necomandat, circuitul intermediar si invertorul PWM realizat cu tranzistoare IGBT si motorul sincron cu magneti permanenti. Pe arborele masinii sunt plasate traductorul de viteza si cel de pozitie.
Diferenta
intre valoarea impusa a turatiei ![]() si valoarea
masurata
si valoarea
masurata ![]() furnizata de
traductorul de viteza TV este aplicata la intrarea regulatorului de
viteza. La iesirea acestuia se obtine valoarea prescrisa a
cuplului electromagnetic m*. Rezulta totodata
si valoarea prescrisa a curentului statoric intrucat
furnizata de
traductorul de viteza TV este aplicata la intrarea regulatorului de
viteza. La iesirea acestuia se obtine valoarea prescrisa a
cuplului electromagnetic m*. Rezulta totodata
si valoarea prescrisa a curentului statoric intrucat ![]() ~ m*
.
~ m*
.
Unghiul de sarcina ![]() se tabeleaza
intr-o memorie EPROM in conformitate cu relatia de
legatura
se tabeleaza
intr-o memorie EPROM in conformitate cu relatia de
legatura ![]() Forma
relatiei depinde de metoda de conducere vectoriala care se
implementeaza.
Forma
relatiei depinde de metoda de conducere vectoriala care se
implementeaza.
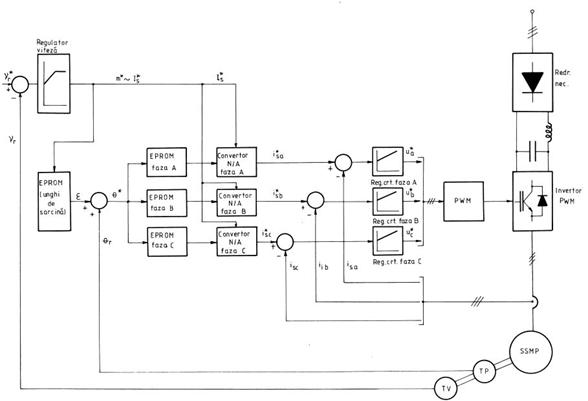
Fig. 4. Sistem de conducere vectorial in curent a motorului sincron
cu magneti permanenti.
Curentii
prescrisi ale celor trei faze, ![]() se obtin prin
proiectia vectorului
se obtin prin
proiectia vectorului ![]() pe cele trei axe,
dupa cum urmeaza:
pe cele trei axe,
dupa cum urmeaza:
 (1)
(1)
unde ![]() fiind pozitia
rotorului data de traductorul de pozitie TP. Functiile sin din
(1) sunt marimi numerice fiind tabelate in memoriile EPROM plasate
pe cele trei faze. Înmultirea celor trei marimi numerice,
conform relatiilor (1), cu valoarea prescrisa a amplitudinii
curentului statoric
fiind pozitia
rotorului data de traductorul de pozitie TP. Functiile sin din
(1) sunt marimi numerice fiind tabelate in memoriile EPROM plasate
pe cele trei faze. Înmultirea celor trei marimi numerice,
conform relatiilor (1), cu valoarea prescrisa a amplitudinii
curentului statoric ![]() care este o marime analogica, se face in
convertoarele numeric analogice N/A de pe cele trei faze. La iesirile
convertoarelor N/A se obtin marimile analogice
care este o marime analogica, se face in
convertoarele numeric analogice N/A de pe cele trei faze. La iesirile
convertoarelor N/A se obtin marimile analogice ![]() care se
compara cu marimile masurate prin intermediul traductoarelor de
curent asezate pe cele trei faze, isa, isb, isc.
Erorile de curent
care se
compara cu marimile masurate prin intermediul traductoarelor de
curent asezate pe cele trei faze, isa, isb, isc.
Erorile de curent ![]() constituie
marimi de comanda pentru regulatoarele de curent PI, implementate pe
fiecare faza in tehnica analogica. La iesirile
regulatoarelor se obtin tensiunile de comanda
constituie
marimi de comanda pentru regulatoarele de curent PI, implementate pe
fiecare faza in tehnica analogica. La iesirile
regulatoarelor se obtin tensiunile de comanda ![]() Aceste
marimi, se compara cu unda triunghiulara de referinta
generandu-se astfel semnalele Sa, Sb, Sc
pentru comanda comutatoarelor invertorului.
Aceste
marimi, se compara cu unda triunghiulara de referinta
generandu-se astfel semnalele Sa, Sb, Sc
pentru comanda comutatoarelor invertorului.
3. Controlul vectorial cu orientare dupa camp
Controlul
vectorial cu orientare dupa camp este o metoda moderna
care se aplica cu succes in conducerea masinilor de c.a.,
asigurand performante dinamice ridicate. La baza controlului
vectorial cu orientare dupa camp sta conducerea decuplata
dupa doua bucle de reglare principale paralele: o bucla de
reglare rapida dupa cuplu prin curentul ![]() si o
bucla de reglare mai lenta dupa fluxul din
intrefier
si o
bucla de reglare mai lenta dupa fluxul din
intrefier ![]() prin curentul
prin curentul ![]()
Structura de conducere vectoriala cu orientare dupa campul din intrefier a unui motor sincron cu magneti permanenti este prezentata in figura 5. Marimile care intervin in schema sunt exprimate in unitati relative.
Marimile de
intrare ale sistemului de control sunt curentii si tensiunile de pe
doua faze ale motorului si pozitia
rotorului ![]() obtinuta de
la traductorul de pozitie TP.
obtinuta de
la traductorul de pozitie TP.
Marimea
prescrisa a cuplului electromagnetic m* este
obtinuta la iesirea regulatorului de turatie pe baza erorii
de turatie ![]() , data de compensatorul diferential. Eroarea de
cuplu
, data de compensatorul diferential. Eroarea de
cuplu ![]() constituie
marimea de intrare in regulatorul de cuplu PI care prescrie componenta
constituie
marimea de intrare in regulatorul de cuplu PI care prescrie componenta ![]() .
.
Componenta ![]() se obtine la
iesirea regulatorului de flux PI in baza erorii de flux
se obtine la
iesirea regulatorului de flux PI in baza erorii de flux ![]() .
.
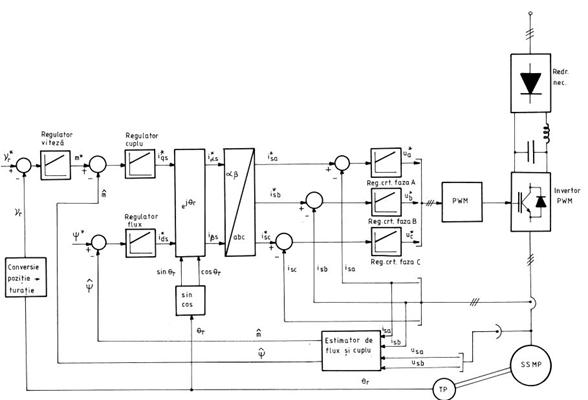
Fig. 5. Sistem de conducere vectoriala cu orientare dupa campul din intrefier a motoarelor sincrone cu magneti permanenti.
Curentii de referinta statorici ![]() sunt generati
prin conectarea in cascada a blocurilor transformatoare de
coordonate
sunt generati
prin conectarea in cascada a blocurilor transformatoare de
coordonate ![]() respectiv de faze
respectiv de faze ![]() .
.
Prin
compararea curentilor de referinta ![]() cu curentii
masurati
cu curentii
masurati ![]() se obtin
semnalele de comanda pentru regulatoarele de curent PI de pe fiecare
faza. La iesirea regulatoarelor rezulta tensiunile de
comanda
se obtin
semnalele de comanda pentru regulatoarele de curent PI de pe fiecare
faza. La iesirea regulatoarelor rezulta tensiunile de
comanda ![]() care se compara
cu unda triunghiulara de referinta obtinandu-se
in final semnalele Sa, Sb,
Sc care comanda comutatoarele statice ale invertorului PWM
(in cazul de fata tranzistoarele IGBT).
care se compara
cu unda triunghiulara de referinta obtinandu-se
in final semnalele Sa, Sb,
Sc care comanda comutatoarele statice ale invertorului PWM
(in cazul de fata tranzistoarele IGBT).
4. Controlul vectorial direct in cuplu si flux
Controlul vectorial direct in cuplu si flux CVDCF realizeaza controlul direct al fluxului statoric si al cuplului electromagnetic utilizand un tabel al comutatiilor optime pentru comanda invertorului PWM.
CVDCF combina teoria conducerii vectoriale cu teoria conducerii directe, fiind introdus recent pe piata actionarilor industriale de firma ABB.
Schema bloc de principiu a CVDCF clasic cu motor sincron cu magneti permanenti este prezentata in figura 6.
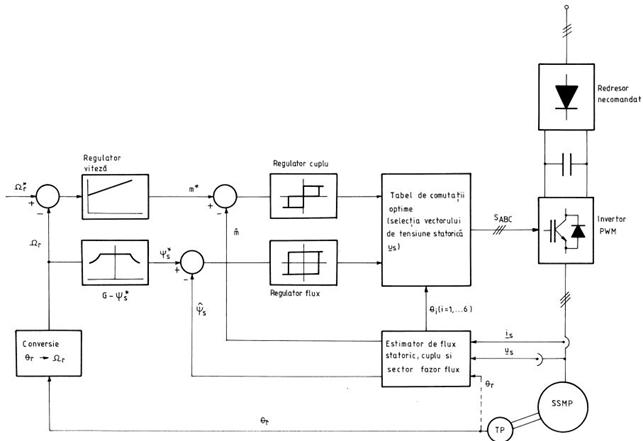
Fig. 6. Schema de principiu a CVDCF clasic cu MSMP.
Functionarea schemei, modul de selectare a vectorilor de tensiune precum si toate considerentele de ordin teoretic prezentate la CVDCF clasic cu motor de inductie trifazat raman valabile si pentru topologia din figura 6.
Pentru
motoarele sincrone cu magneti permanenti apare o problema
in plus si anume estimarea pozitiei initiale a fluxului
magnetului permanent (a axei d). O modalitate simpla de rezolvare a
problemei este ca la pornire, invertorul de tensiune sa fie comandat cu un
vector de tensiune predeterminat fixat, ce se aplica in impulsuri cu
durata de cateva milisecunde. Aceasta va avea ca efect aducerea rotorului
intr-o pozitie cunoscuta. Spre exemplu, daca comanda se
face cu ![]() (1,0,0) va rezulta
(1,0,0) va rezulta ![]()
Copyright © 2025 - Toate drepturile rezervate