|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
MASURAREA TENSIUNILOR MECANICE PRIN METODA TENSOMETRIEI ELECTRICE
1.Generalitati
Tensometria este metoda de masurare a deformatiilor
mici, la suprafata corpurilor supuse unor solicitari. In principiu, prin
metodele tensometrice se masoara variatia ![]() a unei lungimi l, numita baza de masurare. Ca urmare, se
poate determina imediat alungirea specifica:
a unei lungimi l, numita baza de masurare. Ca urmare, se
poate determina imediat alungirea specifica:
![]() (6.1)
(6.1)
Daca starea de solicitare este de intindere sau compresiune simpla si are loc in zona de deformatii elastice a unui material, care se supune legii lui Hooke, se poate determina tensiunea normala corespunzatoare:
![]() (6.2)
(6.2)
unde:
![]() este tensiunea
normala,
este tensiunea
normala,
![]() este
deformatia specifica liniara,
este
deformatia specifica liniara,
![]() este modulul de elasticitate longitudinal al
materialului.
este modulul de elasticitate longitudinal al
materialului.
Deci, prin tensometrie se poate verifica starea de eforturi unitare intr-o constructie, greu de studiat prin calcul.
Traductori
Constatarea ca o mica miscare mecanica poate face sa varieze o marime dintr-un circuit electric si ca urmare, sa modifice curentul si tensiunea din circuit, a dus la crearea a numeroase tipuri de traductori pentru masurarea electrica a marimilor neelectrice.
Desi tensometria electrica este o metoda de masurare a deformatiilor , ea prezinta avantajul amplificarii comode, al posibilitatii de masurare in regim dinamic, al vizualizarii pe aparate electrice, al inregistrarii.
Traductor se numeste piesa care transforma o deformatie mecanica in variatie a unei marimi electrice intr-un circuit.
Cel mai utilizat tip de traductor este traductorul tensometric rezistiv numit si marca tensometrica. Masurarile cu ajutorul acestui tip de traductor se bazeaza pe faptul ca atunci cand un conductor electric se lungeste sau se scurteaza, rezistenta sa electrica se modifica.
 Marca tensometrica prezentata in fig.6.1 este
compusa din suportul 1 realizat dintr-o hartie speciala pe care este aplicat
elementul sensibil 3 (fir metalic subtire). Elementul sensibil este realizat
din constantan (Cu 60%, Ni 40%) sau din
manganina (Cu 84%, Mn 12%, Ni 4%). Folia de protectie 2 protejaza elementul
sensibil. Conectorii 4 se utilizeaza pentru cuplarea marcii in circuitul
electric.
Marca tensometrica prezentata in fig.6.1 este
compusa din suportul 1 realizat dintr-o hartie speciala pe care este aplicat
elementul sensibil 3 (fir metalic subtire). Elementul sensibil este realizat
din constantan (Cu 60%, Ni 40%) sau din
manganina (Cu 84%, Mn 12%, Ni 4%). Folia de protectie 2 protejaza elementul
sensibil. Conectorii 4 se utilizeaza pentru cuplarea marcii in circuitul
electric.
Notand cu R rezistenta
initiala a traductorului si cu ![]() variatia rezistentei
in procesul de deformare, se poate arata ca raportul
variatia rezistentei
in procesul de deformare, se poate arata ca raportul ![]() este proportional cu deformatia specifica
este proportional cu deformatia specifica ![]() prin intermediul unui
coeficient de proportionalitate:
prin intermediul unui
coeficient de proportionalitate:
![]() (6.3)
(6.3)
unde: K este constanta traductorului cu valori cuprinse intre 1,9 si 2,1.
Variatia ![]() are valori mici. De exemplu, pentru un traductor cu
rezistenta ohmica
are valori mici. De exemplu, pentru un traductor cu
rezistenta ohmica ![]() , supus unei deformatii
, supus unei deformatii ![]() si avand constanta K = 2,04 ,variatia de rezistenta este:
si avand constanta K = 2,04 ,variatia de rezistenta este:
![]()
Astfel de variatii ale rezistentei ohmice se masoara prin variatii corespunzatoare de tensiune sau de curent. Masurarea nu se face direct la bornele rezistentei ci introducandu-se intr-un circuit care sa mareasca sensibilitatea si precizia masurarii.
2.Puntea Wheatstone
In fig.6.2 se prezinta un montaj in punte, cu observatia ca pe bratele 1 si 2 sunt montate marci tensometrice, UA este tensiunea de alimentare a puntii, iar UE este tensiunea de iesire.
Conditia de echilibru a puntii este:
![]() (6.4)
(6.4)
In aceste conditii IG =0 si implicit UE =0.
Daca se considera:
R1=R2=R3=R4
si ![]() (i=1,2,3,4)
(i=1,2,3,4)
la o dezechilibrare a
puntii prin modificarea rezistentelor bratelor cu ![]() , se poate scrie relatia:
, se poate scrie relatia:
![]() (6.5)
(6.5)
unde: ![]() este tensiunea de
alimentare a puntii,
este tensiunea de
alimentare a puntii,
![]() este tensiunea pe diagonala de masurare,
este tensiunea pe diagonala de masurare,
K este factorul de sensibilitate a marcii,
![]() este deformatia specifica liniara sub
marca,
este deformatia specifica liniara sub
marca,
n este factorul de punte, obtinut prin insumarea valorilor alocate pentru fiecare brat:
1 daca traductorul este activ si asezat pe directia principala de solicitare;
![]() daca traductorul
este amplasat transversal (
daca traductorul
este amplasat transversal (![]() fiind coeficientul
Poisson;
fiind coeficientul
Poisson;
0 daca traductorul este pasiv (nelipit pe structura elastica).
Valoarea UE
se poate determina pentru diferite situatii. De exemplu, pentru valori alocate
marimilor: K=2; toate bratele sunt active, deci![]() ;
; ![]() ; UA=5V
rezulta:
; UA=5V
rezulta:
![]()
O regula fundamentala a puntii Whetstone este: efectele din doua brate opuse se aduna iar efectele din doua brate adiacente se scad. In conformitate cu aceasta regula, pentru a elimina influenta variatiilor de temperatura asupra preciziei de masurare, o marca tensometrica activa va fi montata pe un brat al puntii, iar pe bratul adiacent se va monta o marca pasiva, numita marca de compensare. Acest montaj al marcilor tensometrice este cunoscut sub denumirea montaj in semipunte.
3. Instalatia de masura
O instalatie de masura care utilizeaza marci tensometrice este prezentata in fig.6.3.
Fig.6.3
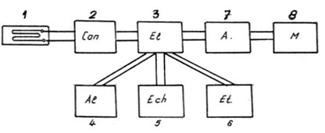
In aceasta figura, s-a notat cu 1 marca tensometrica ce se aplica prin lipire in zona in care se fac masuratorile tensometrice. S-a notat cu 2 dispozitivul de conectare al marcii in circuitul electric. Acest dispozitiv poate fi prevazut cu ploturi sau cu inele colectoare daca piesa pe care s-a aplicat marca este in miscare de rotatie. Circuitul electric (puntea de masura) s-a notat cu 3.
Circuitul electric este alimentat cu tensiune continua sau alternativa de la blocul de alimentare 4. Echilibrarea puntii este realizata prin dispozitivul 5. Pentru a permite obtinerea unor determinari cantitative se utilizeaza blocul de etalonare 6. Tensiunea de iesire UE din circuitul electric este amplificata in blocul amplificator 7. Pentru afisare sau inregistrare se foloseste blocul de masura 8.
Instalatiile utilizate sunt modulare, avand un bloc de alimentare si afisare constituite ca modul de sine statator, iar blocurile de amplificare, echilibrare, etalonare, un alt modul de sine statator numit canal. Instalatiile pot fi livrate avand unul sau mai multe canale. In ultimul caz, modulul de alimentare si afisare poate fi cuplat cu fiecare canal al puntii tensometrice.
4.Aparatul N 2314
Acest aparat este un amplificator cu frecventa purtatoare si demodulare sincrona, care poate lucra cu elemente sensibile tensorezistive, carora le furnizeaza o tensiune alternativa (5KHz) si ale caror variatii sub actiunea marimilor mecanice de masurat, le pune in evidenta sub forma unei tensiuni de iesire. Caracteristicile tehnice ale aparatului sunt:
domeniul
de masura : 0..![]()
scara cea
mai sensibila: ![]() (respectiv 50
(respectiv 50 ![]() ) cu traductor activ, Kmin=2, tensiunea puntii 4Vef
) cu traductor activ, Kmin=2, tensiunea puntii 4Vef
semnal de
iesire: ![]() (max.20 mA)
(max.20 mA)
traductoare utilizate: 501000Ω
configuratia puntii: 1,2,4 traductoare (schema cu 4,5 sau 6 fire)
tensiunea puntii: 1,2,4 sau 8 Vef
plaja de
echilibrare activa raportata la un brat al puntii:![]() =
=![]() in 10 trepte brute a 0,4%, 10 trepte medii a cate 0,04% si
un reglaj fin de 0,04%
in 10 trepte brute a 0,4%, 10 trepte medii a cate 0,04% si
un reglaj fin de 0,04%
semnal
intern de calibrare: ![]()
limitele de reglaj ale amplificarii: 12
frecventa
purtatoare: 5.000 Hz ![]()
Aparatul este un amplificator cu frecventa purtatoare si demodulare sincrona, care alimenteaza puntea traductoare in curent alternativ si pune in evidenta dezechilibrarea acesteia dupa metoda indicatiei directe. Generatorul intern sinusoidal de 5 KHz alimenteaza simetric fata de masa, puntea de traductoare flotanta (fara punct de masa). Aceasta poate fi conectata dupa sistemul cu 4,5 sau 6 fire, ultimele doua situatii asigurand reducerea apreciabila a erorilor provocate de cablu chiar in cazul masuratorilor la distante mari (sute de metri).
Acest efect se obtine prin reglarea automata a amplificarii generatorului, astfel incat sa se mentina constanta tensiunea prescrisa de alimentare a puntii, indiferent de lungimea cablului. Reglajul oscilatorului se efectueaza cu ajutorul firelor de control ale cablului. Tensiunea dintre acestea este detectata si comparata cu o tensiune de referinta. Semnalul de eroare comanda rezistenta unui tranzistor cu efect de camp si prin aceasta, tensiunea oscilatorului. Pentru protectia la scurtcircuit, acest reglaj iese din functiune la sarcini mari, cand oscilatorul devine generator de curent.
Configuratia circuitului puntii de traductoare (fara punct de masa) asigura insensibilitatea la elemente reactive parazite. Totodata, tensiunile de dezechilibru reactive care apar la iesirea puntii sunt tolerate de dinamica amplificatorului de intrare. Pentru dezechilibre reactive foarte mari, se pune in functiune sistemul de echilibrare automata de faza ( format din: defazor, formator, detector sincron de componenta reactiva, modulator).
 Echilibrarea
activa, ca operatie pregatitoare pentru masurare, se realizeaza prin insumarea
unor semnale de reechilibrare obtinute prin divizare inductiva de la firele
martor ale puntii cu semnalul de dezechilibru.
Echilibrarea
activa, ca operatie pregatitoare pentru masurare, se realizeaza prin insumarea
unor semnale de reechilibrare obtinute prin divizare inductiva de la firele
martor ale puntii cu semnalul de dezechilibru.
Calibrarea aparatului
se poate efectua fie cu ajutorul semnalului intern cu doua polaritati (![]() ) fie din exterior de la un dispozitiv de calibrare.
) fie din exterior de la un dispozitiv de calibrare.
Pe panoul frontal al aparatului sunt dispuse urmatoarele elemente de comanda si acces (fig.6.4):
1.- ( + ech.)- diode luminiscente indicatoare de echilibru
2.- ( zero det )- potentiometru ajustabil pentru reglaj zero detector
3.-( CAL ![]() )- comutator pentru generarea semnalelor interne de calibrare
)- comutator pentru generarea semnalelor interne de calibrare
4.-( faza aut) - comutator (prin apasare) pentru lucru cu echilibrare automata de faza
5.-indicator de suprasarcina cu dioda luminiscenta
6.- ( ech.ext.) - comutator (prin apasare) pentru deconectarea organelor interne de echilibrare
7. -( PUNTE )- comutator pentru configuratia puntii si tipul de traductoare utilizate
8.- (inst.) - dioda luminiscenta pentru indicarea conectarii instrumentului de afisare la iesirea amplificatorului
9.- (AMPLIF) - potentiometru elicoidal cu blocare pentru reglajul amplificarii
10.- ( scari)-![]() - comutatorul scarilor de sensibilitate
- comutatorul scarilor de sensibilitate
11.- ( ECHILIBRARE
Brut ) - comutator pentru echilibrare bruta (10 trepte a 0,1 ![]()
12.- (ECHILIBRARE
mediu)- comutator pentru echilibrare medie (10 trepte a 0,1 ![]() )
)
13.- ( ECHILIBRARE fin
) - potentiometru elicoidal pentru echilibrare fina (0,11 ![]()
![]()
![]()
![]()
![]()
Configuratia aparatului pentru 2T (semipunte) este prezentata in fig.6.5.
Fig.6.5
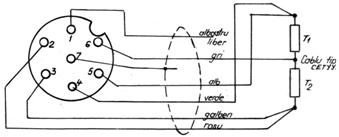
Pentru conexiunea cablului la mufa traductor, vederea este din partea cu lipituri de la cablu.
Echilibrarea puntii
In vederea efectuarii echilibrarii se poate utiliza indicatorul propriu cu diode electroluminiscente al amplificatorului. Rezolutia acestui indicator este de 0,1% din capat de scara (aceeasi pe toate scarile). Se roteste comutatorul scarii in sens orar pana cand se obtine o indicatie suficienta, inferioara capatului de scara. Prin actionarea comutatoarelor ECHILIBRARE (brut, mediu ,fin) se aduce indicatia la zero (aici una din diode nu lumineaza). Comutatoarele de echilibrare se rotesc in sens antiorar cand lumineaza dioda din dreapta (dezechilibru ,+' ) si in sens orar cand lumineaza dioda din stanga (,-'). Operatia se efectueaza cu comutarea pe scari din ce in ce mai sensibile si se incheie cu actionarea butonului pentru echilibrare fina. In prezenta unui dezechilibru puternic (activ sau reactiv) dioda luminiscenta pentru indicarea suprasarcinii, amplasata langa clapa , faza aut' este aprinsa. Daca aceasta nu se stinge la actionarea organelor de echilibrare, aparatul fiind pe scara pe care urmeaza a se efectua masurarea, in timp ce la iesire se obtine indicatia de echilibru se apasa clapa ,faza aut'. Daca in aceasta situatie dioda se stinge se poate face ajustarea definitiva a echilibrului. In caz contrar (situatie putin probabila), dezechilibrul reactiv maxim tolerat este depasit. Daca indicatorul de suprasarcina ramane aprins si nu se obtine indicatia de echilibru la iesire, desi traductoarele au toleranta admisa a rezistentei in punte exista o defectiune (brat in scurtcircuit sau intrerupt).
Calibrarea aparatului
Prin operatia de
calibrare se stabileste o anumita corespondenta, cat mai simpla, intre marimea
masurata si indicatia, de iesire a amplificatorului. Calibrarea se face cu ajutorul
semnalului de calibrare intern. Intrucat valoarea semnalelor de calibrare
inscrisa in panou ![]() este valabila numai pentru K=2, se calculeaza deformatia
este valabila numai pentru K=2, se calculeaza deformatia ![]() echivalenta semnalului de calibrare pentru valoarea K,
efectuata cu ajutorul relatiei:
echivalenta semnalului de calibrare pentru valoarea K,
efectuata cu ajutorul relatiei:
![]() (6.6)
(6.6)
Dupa ce se
echilibreaza aparatul, se trece comutatorul ,scari' pe pozitia ,0', se verifica
si eventual se ajusteaza in aceasta situatie echilibrul cu surubelnita (zero
det.). Se trece apoi aparatul pe scara de 10.000 sau 20.000 ![]() dupa cum
dupa cum ![]() este mai mic sau mai
mare de 10.000
este mai mic sau mai
mare de 10.000![]() si se regleaza sensibilitatea pentru a se obtine la iesire
indicatia corespunzatoare valorii
si se regleaza sensibilitatea pentru a se obtine la iesire
indicatia corespunzatoare valorii ![]() .
.
Se verifica daca
pentru semnalul de calibrare de semn opus indicatia este aceeasi. Daca se
considera necesara micsorarea erorii provocate de asimetrie, se verifica si
eventual se reajusteaza cat mai precis zero si apoi se regleaza sensibilitatea
astfel incat abaterile indicatiei de la valoarea ![]() sa fie egale si opuse pentru cele doua sensuri de
dezechilibru.
sa fie egale si opuse pentru cele doua sensuri de
dezechilibru.
Se trece apoi aparatul pe scara pe care urmeaza sa se efectueze masuratoarea. Indicatia de zero nu va avea, in urma acestei comutari, o variatie mai mare de 0,05%. Daca se considera necesar se reface zero.
Se doreste echilibrarea aparatului cu ajutorul semnalului intern pentru K=2,1:
![]()
Indicatia pe scara de 10.000 se regleaza la valoarea 9254![]() . Se trece apoi pe scara pe care urmeaza a se efectua
masurarea.
. Se trece apoi pe scara pe care urmeaza a se efectua
masurarea.
Exemplul 2
Se doreste calibrarea aparatului pentru K=1,6:
![]()
Indicatia pe scara de 20.000 se regleaza la 12.500![]() . Daca se lucreaza cu o punte de traductoare avand mai multe
brate active, supuse al aceeasi deformatie de masurat
. Daca se lucreaza cu o punte de traductoare avand mai multe
brate active, supuse al aceeasi deformatie de masurat ![]() , se poate calibra aparatul pentru
, se poate calibra aparatul pentru ![]() , iar deformatia efectiva se poate calcula din relatia:
, iar deformatia efectiva se poate calcula din relatia:
![]() (6.7)
(6.7)
unde: n - numarul bratelor cu traductoare active,
k - constanta traductoarelor,
![]() - deformatia indicata de aparat,
- deformatia indicata de aparat,
![]() - deformatia efectiva.
- deformatia efectiva.
Copyright © 2025 - Toate drepturile rezervate