|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
Raport de Cercetare
Grant: CONCEPTIA MODULARA A SISTEMELOR AUTOMATE DE CONTROL DIMENSIONAL IN VEDEREA MODERNIZARII SI RETEHNOLOGIZARII ECHIPAMENTELOR DE CONTROL SI ASIGURARE A CALITATII PRODUSELOR
Universitatea: "Transilvania" din Brasov
Prin acest program, colectivul de autori si-a propus sa perfectioneze si modernizeze sistemele de control (inspectie) dimensional prin realizarea unor structuri modulare performante, aliniate standardelor internationale. În cadrul acestui program, echipa de cercetare (compusa din membri ai Centrului de Cercetare "CESMA" Brasov din cadrul Universitatii Transilvania din Brasov) a urmarit sa implementeze cele mai noi metode de masurare si analiza necesare stabilirii si asigurarii calitatii produselor, sa restructureze, modernizeze si eficientizeze sistemele automate de control (inspectie) dimensional prin generarea de structuri modulare deosebit de flexibile si optimizate pentru o serie de aplicatii reprezentative.
In acest sens, colectivul de cercetatori a urmarit sa reproiecteze in varianta modulara principalele subansamble componente, sa realizeze o baza de date si prin sisteme expert sa genereze structuri optime pentru diverse sisteme de control (inspectie) dimensional cu asigurarea de performante constructiv - functionale la nivel mondial.
Analiza interdisciplinara a sistemelor automate de control, a pus in evidenta elementele caracteristice si factorii care influenteaza functionarea automatelor de control. Avand la dispozitie rezultatele cercetarilor anterioare, dar si echipamente de testare - un automat de control bile, un automat de control inele de rulmenti si un automat pentru controlul jocului radial la rulmentii radial cu bile, toate existente in dotarea laboratorului de Automate de control si de servire, precum si profitand de stransa colaborare cu S.C. RULMENTUL S.A., colectivul de cercetare a avut posibilitatea de a stabili principalele criterii de optimizare si modularizare utilizabile la restructurarea sistemelor de control (inspectie) dimensional, dar si de a experimenta solutii multiple de implementare a configuratiilor modulare in conditiile unui control multiparametric si a unor protocoale de verificare impuse.
În acest sens, s-au formulat urmatoarele obiective de cercetare:
Ø Elaborarea familiilor de module pentru generarea de structuri de control optimizate si modularizate cu performante inalte;
Ø Proiectarea de familii de module ce intra in componenta structurilor optimizate de control dimensional automat;
Ø Elaborarea unei bazei de date si a sistemelor expert pentru generarea de structuri de control optimizate si modularizate cu performante inalte.
Pentru solutionarea acestor obiective s-a realizat:
Stabilirea principalelor criterii de optimizare si modularizare utilizabile la restructurarea sistemelor de control (inspectie) dimensional analizate;
Stabilirea configuratiei modulare a sistemelor de control in conditiile unui control multiparametric si a unor protocoale de verificare specifice si proiectarea modulara a sistemelor de orientare si pozitionare pentru asigurarea preciziei controlului (inspectiei) si realizarea unui regim optim de functionare;
Elaborarea familiilor de module pentru generarea structurilor de control (inspectie) optimizate si modularizate;
Proiectarea unor familii de module, interschimbabile ce intra in componenta structurilor optimizate de control (inspectie) dimensional automat;
Elaborarea unei bazei de date si a sistemelor expert pentru generarea de structuri de control (inspectie) optimizate si modularizate cu performante inalte;
Stabilirea conditiilor de generalizare a structurilor modulare realizate pe baza familiilor de module si a protocoalelor de control aferente.
Echipa de cercetatori propune o abordare moderna a acestor sisteme, o trecere la proiectarea unitara, modulara si cu un deosebit grad de universalitate. Aceasta directie de cercetare bazata pe proiectarea asistata de calculator si completata cu soft specific si o baza de date corespunzatoare, va putea furniza utilizatorilor structuri automate de inspectie dimensional pentru o gama larga de aplicatii luandu-se in considerare toate conditiile specifice impuse.
Prin elaborarea unei baze de date si softului aferent, autorii doresc sa puna la dispozitia utilizatorilor si proiectantilor din domeniu, parghiile necesare pentru alegerea si stabilirea structurilor modulare specifice fiecarei aplicatii. Interesul deosebit manifestat de S.C. Rulmentul S.A. si ICSITROA Brasov in aplicarea rezultatelor obtinute pe baza acestui program fac posibila implementarea imediata a acestor solutii si definirea de noi directii de dezvoltare.
Practica a confirmat ca masurarile individuale succesive nu confera o imagine suficient de exacta asupra preciziei executiei, corelate si de ansamblu. Controlul (inspectia) simultan a mai multor parametri si-a gasit rezolvarea in general, de la caz la caz dupa variantele adoptate de diversele firme producatoare. Prin cerinta reducerii timpului necesar pregatirii fabricatiei s-a conturat necesitatea tipizarii elaborarii procedeelor si mijloacelor de control ( inspectie).
Instalatiile si dispozitivele de control (inspectie) din elemente tipizate cu unul sau mai multe posturi de masurare au un grad mai mare de universalitate, fiind destinate in general controlului (inspectiei) Pre si Post Proces interoperational, final, de sortare sau statistic. Evolutia instalatiilor si dispozitivelor pentru controlul (inspectia) multiparametric este marcata, pe langa cresterea productivitatii, de cresterea preciziei masurarii, rezultata ca o cerinta a maririi preciziei de executie a masurandului si implicit a produselor. Conditiile referitoare la productivitate se exprima prin gabarit raportat la dimensiunea maxima a masurandului, tact de lucru, autonomie in functionare nesupravegheata, gradul de automatizare a operatiei de masurare si deciziei asupra calitatii masurandului (incadrarea tuturor parametrilor masurati in campurile de toleranta si corelatiile prescrise).
Dintre avantajele utilizarii instalatiilor si dispozitivelor formate din elemente tipizate pot fi enumerate: imbunatatirea calitativa a constructiei; verificarea simultana a mai multor parametrii cu posibilitatea cumularii rezultatelor, prin aceasta micsorandu-se considerabil timpul de control (inspectie) comparativ cu metodele controlul (inspectiei) conventional; reducerea duratei si costurilor de proiectare si de executie, executia elementelor componente fiind posibil de realizat si in serie, centralizat; posibilitatea reutilizarii elementelor tip in combinatii noi mai ales in cazul unor fabricatii unicat si serie mica.
Mijlocul de control (inspectie) reprezentativ se reduce la o combinatie de elemente constructive, mecanisme, si subansambluri aflate in componenta tuturor mijloacelor de control (inspectie) parametric sau multiparametric. De la caz la caz, mijloacele pentru controlul (inspectiei) multiparametric pot avea in totalitate sau numai o parte din elementele, mecanismele, si subansamblurile mijlocului de control (inspectie) reprezentativ.
Conceptul de "constructie modulara" este o cale de realizare a flexibilitatii dispozitivelor de control/inspectie. Modul de inspectie este un ansamblu realizat ca parte a unei familii sau grupe de ansambluri destinate indeplinirii unor functii de inspectie comune, conceput astfel ca sa functioneze interconectat cu module de alta functionalitate in cadrul unor sisteme sau in afara fabricatiei. Multimea modulelor care indeplinesc aceiasi functie poarta denumirea de "sistem modular".
Diferenta intre notiunile de sistem de control (inspectie) si sistem modular, in ambele cazuri fiind vorba despre sisteme sau multimi de elemente interconectate formand o structura cu o anumita functiune, consta in aceea ca functia sistemului de control (inspectie) este executarea unei anumite teme de control (inspectie), iar functia sistemului modular este furnizarea sistemelor de control (inspectie) de module pentru executarea unui anumit gen de operatii. Rezulta ca functia sistemului modular este mai ingusta decat aceea a sistemului de control (inspectie), indeplinind numai o parte din functiile acestuia, dar in acelasi timp mai larga, deoarece elementele sistemului modular sunt destinate echiparii unei multimi de sisteme de control (inspectie).
Sunt cunoscute cateva sisteme modulare alcatuite din elemente tipizate functional si dimensional cu aplicare mai larga in constructia de masini fara a mai acoperi in totalitate situatiile de control (inspectie) specifice.
În majoritatea cazurilor, sistemele modulare mentionate in tabelul 1 si-au gasit domeniu de aplicare mai ales in controlul (inspectia) "ÎNAINTE" sau "DUPA PROCES" neautomatizat sau semiautomatizat. Din punct de vedere constructiv, se utilizeaza ca mijloace de masurare aparate mecanice, pneumatice, electronice sau combinatii ale acestora.
Sistemele modulare, mai ales acelea electronice, sunt destinate control (inspectie)ului a mai mult de doua variabile, de forma simpla ±A si/sau ±B, diferentiala A-B sau -A+B, aditiva A+B sau -A -B, precum si functii cu acestea in cazul control (inspectie)ului abaterilor de la forma sau pozitia geometrica.
Utilizarea configuratiilor modulare electronice de masurare si decizie asupra calitatii masurandului ofera posibilitatea asigurarii unor functii complexe de calcul si corelare. Acestea sunt caracterizate prin versalitatea, viteza de raspuns, rapiditatea in masurare si decizie, automatizarea si centralizarea informationala a deciziilor, telecomanda, etc.
În ultima vreme, configuratiile modulare de masurare si decizie electronice cu afisare analogica verticala au capatat o frecventa mare in utilizare.
Pe langa indicarea mai larga, mai clara si mai vizibila este posibila si stabilirea unor domenii de toleranta diferite in asa fel incat limitele superioare si inferioare sa coincida. Alinierea lor ofera posibilitatea unor evaluari uzuale globale mai rapide ale conditiilor si corelatiilor de control (inspectie) prescrise. Configuratiile pneumatice, partial modulare, nu pot asigura in totalitate atributele sistemelor modulare electronice. Principalul lor avantaj, in special la traductoarele de inalta presiune cu actiune directa (p ≥ 0,15 MPa) il reprezinta autocuratirea zonei de masurare.
Particularitatile conceptiei modulare a configuratiilor instalatiilor pentru controlul (inspectia) multiparametric, in raport cu modul conventional de proiectare a acestora sunt:
a) stabilirea functiunii fiecarui modul pe baza analizei morfologice asigurandu-se acoperirea unui numar mai mare de functiuni cu un numar mai mic de module diferite. În acest scop se foloseste metoda cutiei morfologice, care reprezinta o clasificare a tuturor elementelor componente ale unui subsistem, in functie de mai multe criterii, fiecare etaj al cutiei reprezentand clasificarea dupa un anumit criteriu.
b) stabilirea caracteristicilor functionale ale modulelor intr-o stricta corelatie reciproca, asigurandu-se astfel interconectabilitatea ansamblelor modulare in cadrul sistemelor complexe.
Piesele care urmeaza a fi supuse controlului (inspectiei) determina prin forma, structura si caracteristicile pe care le prezinta, configuratia si parametrii de functionare ai sistemului de control (inspectie). Chiar daca o caracteristica a piesei influenteaza in mod direct un singur modul al acestuia, pentru a putea fi compatibile modulele trebuie sa indeplineasca unele conditii de interconectare, astfel incat influenta piesei de masurat se propaga in lant intre modulele adiacente. Modul in care se exercita influenta piesa de masurat - modul este prezentata sintetizat in tabelul 2.
Tab.2 Influenta parametrilor generali asupra structurii automatului de control (inspectie).
|
Modul Parametru |
Alimentare |
Transport |
Orientare |
Dozare |
Masurare |
Sortare |
|
Forma |
tip: buncar sau magazie - modul de prindere |
- modul de asezare |
- mod de asezare secundara |
- forma alveolelor |
- nr-ul de operatii -mod de asezare | |
|
Dimensiuni |
- capacitate - mod de prindere |
- gabarit -mod de actionare |
-dimensionarea dspozitivelor |
-dimensionarea alveolelor |
-domeniul de masurare |
-tip constructiv - capacitate |
|
Cond. de calitate |
-pastrarea integritatii pieselor |
-precizia de masuarare |
-nr-ul de clase dimensionale |
|||
|
Parametrul controlat(inspectat) |
-alegerea bazei de sprijin |
-alegerea capetelor de masurare | ||||
|
Aut. de functionare |
-volum |
-volum |
||||
|
Productivitate dorita |
- viteza |
- tact -viteza |
-tact -viteza |
-tact -viteza |
-tact -viteza | |
|
Modul de actionare |
-tip constructiv |
-tip constructiv | ||||
|
Conditii speciale |
Un proces tehnologic este flexibil daca trecerea de la fabricatia unui produs la fabricatia altuia se realizeaza cu cheltuieli minime de manopera si de mijloace materiale.
Pentru elaborarea unui proces tehnologic flexibil este necesar ca intre produsele de executat si componentele acestora sa existe niste inrudiri de caracteristici care sa faciliteze trecerea.
În acest caz, tehnologia de fabricatie se elaboreaza pentru intreaga grupa de produse inrudite. O asemenea tehnologie unitara este denumita tehnologie de grup.
Ideea tehnologiilor de grup a fost fundamentata si dezvoltata initial pentru procesele de prelucrare prin aschiere, dar ulterior principiul s-a extins si asupra altor procese de fabricatie, si este fundamentala pentru functionarea sistemelor flexibile de fabricatie. Exista mai multe criterii de formare a grupului de piese pentru care se pot elabora tehnologii de grup. Aceste criterii stabilesc caracteristicile de inrudire dupa:
Ø material (nu se pot introduce in aceeasi grupa obiecte din materiale diferite, de exemplu materiale plastice si otel);
Ø forma geometrica;
Ø dimensiuni (nu se pot include in aceeasi grupa piese foarte diferite dimensional, de exemplu un surub si un batiu de strung), grupele se formeaza din piese de dimensiuni apropiate, deoarece numai astfel se poate asigura adaptarea lor la utilajele pe care urmeaza sa fie executat controlul (inspectia);
Ø precizia dimensionala (campul de tolerante);
Ø calitatea suprafetei;
Ø alte criterii.
Pentru grupa alcatuita din piese, subansamble sau ansamble, se constituie "produsul ideal". Acesta contine o singura data caracteristicile comune, stabilite prin aplicarea criteriilor mentionate, cat si caracteristicile distincte ale produselor grupate.
Colectivul de autori a avut ca prima preocupare realizarea unei baze de date care sa cuprinda caracteristicile pieselor in conditiile aplicarii in procesele de control (inspectie) dimensional a tehnologiilor de grup.
Identificarea si particularizarea fiecarei piese din punct de vedere al procesului de masurare automata se va face utilizand patru matrice ale caror elemente iau numai doua valori, 0 si 1, in logica adevarat/fals: o matrice F corespunzatoare configuratiei geometrice a piesei, doua matrice M si M1 care oglindesc parametrii geometrici masurati in doua plane perpendiculare si o matrice A pentru abaterile de forma care se vor calcula pe baza rezultatelor obtinute prin aplicarea celor doua matrice de masurare asupra modulului de masurare. Astfel, elementele celor patru matrice au semnificatiile:
Ø pentru matricea F - prezenta forma geometrica / lipsa,
Ø pentru matricele M si M1 - masurarea unui parametru geometric / anulare masurare,
Ø pentru matricea A - calculul unei anumite abateri geometrice / acceptarea valorilor masurate in forma in care au fost determinate, in valoare numerica.
Daca elementele matricei de forma F sunt determinate doar de configuratia geometrica a piesei, luand in considerare forma exterioara, forma interioara, tesiturile sau racordarile semnificative ca suprafete conice, respectiv calote sferice, nu acelasi lucru se poate spune despre celelalte matrice. Matricele de masurare M si M1 sunt determinate de parametrii geometrici ai caror valoare trebuie determinata, in unul sau in doua plane de masurare, dupa complexitatea rezultatelor cerute.
Ele influenteaza in mod direct dispunerea palpatorilor in capul de masurare.
În cazul pieselor de revolutie, este posibila dispunerea palpatorilor intr-un singur plan, chiar daca matricea de masurare M1 il indica si pe cel de-al doilea. Acesta din urma poate fi realizat prin mentinerea fixa a capului de masurare si rotirea piesei cu 90 În vederea celei de-a doua masurari.
În general piesele paralelipipedice necesita materializarea planelor de masurare in mod direct, prin dispunerea palpatorilor in capul de masurare, deoarece dimensiunea mai mare a diagonalei decat distanta intre doua fete paralele de masurare face imposibila rotirea piesei in postul de masurare, fara retragerea palpatorilor.
Elementele matricei de abateri de forma F se gasesc intr-o stransa interdependenta cu cele ale matricelor de masurare. Toate aceste trei matrice au acelasi numar de elemente, avand corespondenta in general elementele de pe aceeasi linie, dar si elemente de pe linii diferite, apartinand unui grup de parametrii. Aceasta ultima situatie poate sa apara in cazul determinarii conicitatii unei piese pe baza cunoasterii a doua diametre si a distantei intre planele in care acestea au fost masurate.
Cele patru matrice care caracterizeaza procesul de masurare stabilesc pe grupuri de piese inrudite, pentru utilizarea lor eficienta si pentru a ramane la un numar rezonabil de linii. Nu se pot codifica prin aceleasi matrice piese foarte diferite dimensional, sau cu forme foarte diferite. Matricele de reprezentare ar avea in aceste cazuri o forma prea complicata si ar dificil de operat cu ele. Cum matricele de masurare se oglindesc in configuratia capului de masurare, acesta ar fi deosebit de complex pentru a acoperi un interval dimensional foarte vast si un numar mare de configuratii geometrice. Din aceste considerente se aleg grupuri de piese inrudite ca forma si dimensiuni carora li se asociaza matricele caracteristice. Un astfel de grup poate fi considerat ca fiind format din piesele care intra in componenta rulmentilor.
Pentru determinarea matricei de forma se ia in considerare piesa cu cea mai complexa configuratie, care va determina numarul de linii ale matricei. Daca se observa ca una sau mai multe piese din grup prezinta forme geometrice care nu se regasesc in configuratia piesei principale, in matricea de forma se adauga linii corespunzatoare acestora, care se lasa pe " 0 logic" pentru piesele unde ele nu apar.
În cazul grupului de piese considerat, inelul de rulment cardanic este piesa principala. Considerand forma suprafetelor exterioare si interioare se determina matricea F. Se adauga si liniile corespunzatoare calotei sferice a rolei elipsoidale si celei de-a treia suprafete conice a rolei conice.
Matricea de masurare M cuprinde elementele necesare determinarii a doua diametre exterioare, aflate la o distanta cunoscuta pe axa longitudinala in vederea obtinerii conicitatii exterioare, doua diametre interioare pentru determinarea conicitatii interioare, un diametru al canalului exterior, o distanta liniara care este valoarea grosimii peretelui inferior, o distanta ce reprezinta pozitionarea canalului si inca doua distante care sunt inaltimea piesei in doua puncte diametral opuse, in vederea determinarii bataii axiale.
Matricea de masurare M1 cuprinde elementele care semnifica determinarea intr-un plan perpendicular fata de primul al unui diametru exterior, care asociat cu cel precedent conduce la aflarea bataii radiale exterioare, analog un diametru interior in cel de-al doilea plan, in vederea calcularii bataii radiale interioare si doua inaltimi pe un diametru perpendicular pe cel interior, cu scopul determinarii ulterioare a bataii axiale maxime.
Elementele matricei A care sunt pe 1 logic au valoarea logica adevarat si indica operatii matematice aplicate intre elementele matricelor M si M1, pe aceeasi linie in cazul determinarii bataii radiale si a celei axiale si extinse pe doua linii pentru obtinerea conicitatii. Elementele matricei A egale cu 0 au valoarea logica fals si lasa elementele matricelor de masurare in valoarea numerica determinata prin masurare.
Trebuie observat ca luand in considerare o configuratie a matricelor de masurare M si M1, rezultatele numerice care le corespund pot fi lasate in aceasta forma sau prelucrate in vederea determinarii unor abateri geometrice, dupa cum elementele matricei abaterilor sunt pe 0 logic sau pe 1 logic.
F = ![]() , M =
, M =![]() , M1 =
, M1 =![]() , A =
, A =![]() .
.
Matricea de forma ØMatricea de masurare ØMatricea de masurare ØMatricea abaterilor de forma
Pentru exemplificarea modul de formare al produsului ideal, in continuare, se prezinta o metoda matriciala. În acest exemplu s-au admis ca si criterii de grupare, formele geometrice ale pieselor si suprafetele de masurare necesare.
Desenele pieselor, formele geometrice simple componente si suprafetele de masurare sunt specificate in tabelul 3. Reunind caracteristicile de forma ale celor cinci considerate, se intocmeste lista caracteristicilor de forma a piesei ideale (Tab.4). Reunind caracteristicile suprafetelor de masurare ale pieselor din grup, se intocmeste lista suprafetelor de masurare a piesei ideale (Tab.5.).
Tab. 3. Forme geometrice simple componente si suprafete de masurare
|
Nr. crt. |
Desenul piesei |
Forme geometrice simple componente |
Suprafetele de masurare |
|
|
cilindru exterior |
diametru exterior inaltime |
|
|
|
cilindru exterior cilindru exterior cilindru exterior trunchi de con exterior trunchi de con exterior |
diametru exterior diametru exterior diametru exterior inaltime distanta umar |
|
|
|
cilindru exterior cilindru exterior trunchi de con exterior |
diametru exterior diametru exterior diametru exterior inaltime |
|
|
|
cilindru exterior trunchi de con exterior cilindru interior |
diametru exterior diametru exterior diametru exterior diametru interior inaltime inaltime (adancime) distanta umar grosime perete |
Reunind caracteristicile suprafetelor de masurare ale pieselor din grup, se intocmeste lista suprafetelor de masurare a piesei ideale (Tab.5).
Tab.4. Matricea de forma Tab.5 Matricea de masurare
|
Nr.Crt. |
Forme geometrice simple componente ale piesei ideale |
Nr.Crt. |
Suprafete de masurare |
|
|
Cilindru exterior |
Diametru exterior |
|||
|
|
Cilindru exterior |
Diametru exterior |
||
|
Cilindru interior |
Diametru exterior |
|||
|
Trunchi de con exterior |
Diametru interior |
|||
|
Trunchi de con exterior |
Diametru interior |
|||
|
Cilindru exterior |
Distanta umar |
|||
|
Grosime perete |
||||
|
Înaltime (adancime) |
||||
|
Înaltime |
Pentru fiecare piesa apartinatoare grupului se definesc doua matrice coloana, respectiv, o matrice a formei geometrice notata cu "F" si o matrice a suprafetelor de masurare notata cu "M". Pe langa aceste doua matrice se vor mai defini alte doua matrice, una a suprafetelor de masurare notata cu "M1" si una a abaterilor notata cu "A". Prin conventie, numarul de linii al matricei F se admite egal cu numarul formelor geometrice simple rezultate pentru piesa ideala.
Elementele acestei matrice se considera egale cu "1", daca piesa contine forma elementara inscrisa pentru piesa ideala in linia respectiva a Tab.4 si "0" daca nu contine. Numarul de linii al matricei M este egal cu numarul de suprafete de masurare alese pentru piesa ideala. Elementele acesteia se considera egale cu "1" daca se face masurare la suprafata respectiva si "0" daca nu se executa masurare (Tab.5). Pentru calculul elementelor matricii de abateri A se va folosi o a doua matrice de masurare M1 care va fi identica cu prima numai ca masurarea se va face dupa rotirea in prealabil a capului de masurare sau a piesei cu un unghi de 90º. Din motive constructive ale postului de masurare se va alege rotirea piesei.
Elementele matricii A care sunt pe 1 logic au valoarea logica adevarat si indica operatii matematice aplicate intre elementele matricilor M si M1, pe aceeasi linie in cazul determinarii bataii radiale si a celei axiale si extinse pe doua linii pentru obtinerea conicitatii. Elementele matricei A egale cu 0 au valoarea logica fals si lasa elementele matricilor de masurare in valoarea numerica determinata prin masurare.
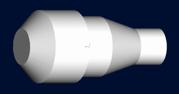
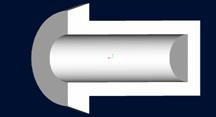
Pentru piesa ideala considerata (fig.1), elementele matricei de abateri A au urmatoarele semnificatii:
 d1=1 -
bataia radiala exterioara, a1=b1-c1;
d1=1 -
bataia radiala exterioara, a1=b1-c1;
d2=0 - diametru exterior, se lasa in valoare absoluta;
d3=1 - conicitatea exterioara,![]()
d4=1 - bataia radiala interioara, d4=b4-c4;
d5=1
- conicitatea interioara,![]()
d6=1 - bataia axiala, d6=b6-c6;
d7=0 - grosimea peretelui, se lasa in valoare absoluta;
d8=1 - bataia axiala, d8=b8-c8;
d9=1 - bataia axiala, d9=b9-c9.
Pentru piesele din tabelul 3 matricele sunt urmatoarele (tabelul 6).
Tab.6. Matricele asociate
|
Piesa |
F |
M |
M1 |
A |
Piesa |
F |
M |
M1 |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Domeniul de masurare influenteaza postul de masurare prin alegerea adecvata a cursei palpatorilor si a elementelor de pozitionare a piesei, iar forma piesei va determina matricele de masurare pe baza carora se determina numarul palpatorilor si pozitionarea acestora. Informatia de masurare este preluata initial de palpatori mecanici care au asociati traductori de semnal, care se conecteaza la module electronice de analiza si decizie.
Pentru realizarea unui sistem automat de control (inspectie) dimensional este necesara atribuirea unui anumit cod fiecarei piese, care sa permita identificarea piesei dupa forma geometrica, numarul de masurari necesar si dupa operatiile matematice care se aplica rezultatelor obtinute in urma procesului de masurare cu scopul calcularii abaterilor geometrice solicitate. Pentru a indeplini aceste criterii vom porni de la modelul tehnologiilor de grup, pe care il vom extinde asupra procesului de masurare automata.
În aceste conditii s-a trecut la restructurarea si realizarea unei structuri modulare pentru automatizarea controlului (inspectiei) dimensional (fig.2). Fiecare dintre module prezinta o configuratie si niste parametrii de functionare care pot fi alesi fie direct, in functie de tipul piesei considerate, fie prin calcul, pe baza proprietatilor piesei.
 Astfel,
efectul parametrilor pieselor in configuratia modulelor este
prezentat in continuare.
Astfel,
efectul parametrilor pieselor in configuratia modulelor este
prezentat in continuare.
Utilizare
configuratiilor modulare electronice de masurare si decizie
asupra calitatii masurandului prin variabile si
corelatii prescrise ofera posibilitatea asigurarii unor
functii complexe de calcul si corelare. Acestea sunt caracterizate
prin versatilitate, viteza de raspuns, rapiditate in
masurare si decizie, automatizarea si centralizarea
informationala a deciziilor, telecomanda, etc.
Pornindu-se de la dorinta asigurarii unor sisteme de control/inspectie automatizate, cu eficienta, productivitate si precizie ridicate, s-a incercat conceperea de structuri modulare pentru piese de tip arbore si bucse. Un exemplu in acest sens il constituie sistemul automat de control/inspectie in structura modulara destinat industriei de rulmenti si organe de asamblare. Automatul, prezentat in figura 3, este conceput modular, fiecare modul asigurand una din principalele operatii impuse de procesul automat de control/inspectie. Varianta prezentata poate asigura controlul /inspectia simultana a pieselor provenite de pe doua linii de fabricatie diferite.
Prin constructia realizata, piesele supuse controlului /inspectiei sunt stocate in modulul de alimentare (1, 1'). Modulul de transport (3) asigura transferul pieselor de la modulul de alimentare la modulul de control/inspectie. Fiind vorba de rulmenti si elemente de rulmenti, la varianta de modernizare propusa introducerea / extragere in (din) postul de masurare (5, 9) si fixarea se realizeaza automat prin elemente specifice modulului de control/inspectie.
Modulul de control/inspectie are in componenta postul de masurare, un sistem de prindere si orientare, precum si unul de alimentare si extragere din postul de masurare. Dupa determinarea parametrilor controlati /inspectati, piesele sunt transferate la modulul de sortare care asigura stocarea pe clase dimensionale in functie de valoarea determinata in timpul fazei de control/inspectie si prelucrate de catre blocurile de comanda.
Analizele efectuate au permis trecerea la o restructurare a postului de masurare, respectiv a modulului de inspectie, parte componenta a sistemului automat. În scopul modularizarii si asigurarii unei mai mari flexibilitati si estimarea cu mare precizie a rezultatelor instalatia (fig. 4) a fost realizata in varianta modulara. Postul automatizat permite atat masurarea de diametre si inaltimi, cat si de abateri de forma, atat in conditii statice cat si dinamice.
 În
componenta postului de inspectie intra urmatoarele module
(fig. 5): - placa de baza, pe care
se monteaza toate modulele functionale ale instalatiei;
-suportul de palpatori; -palpatori; -modulul de fixare interioara;
-modulul superior de masurare.
În
componenta postului de inspectie intra urmatoarele module
(fig. 5): - placa de baza, pe care
se monteaza toate modulele functionale ale instalatiei;
-suportul de palpatori; -palpatori; -modulul de fixare interioara;
-modulul superior de masurare.
Postul este alcatuit din module ce se aseaza pe o placa de baza prevazuta cu gauri si canale frezate, astfel incat sa poata fi folosita pentru toate modulele. Sub placa de baza se monteaza bacurile de prindere a pieselor la interior.
Palpatorii sunt construiti pentru a putea fi folositi la masurarea unei game largi de diametre.
Pentru masurarea inaltimii pieselor, postul de inspectie este prevazut cu o traversa mobila care sustine palpatori, traversa antrenata de un cilindru pneumatic.
Postul de inspectie poate asigura determinarea parametrilor inspectati in puncte fixe impuse de protocolul de inspectie, dar si o determinare continua a acestora prin rotirea piesei in postul de inspectie. Miscarea de rotatie este determinata de modulul de rotire in momentul in care masurandul intra in contact cu rola presoare.
Domeniul de masurare influenteaza postul de masurare prin alegerea adecvata a cursei palpatorilor si a elementelor de pozitionare a piesei, iar forma piesei va determina matricele de masurare pe baza carora se determina numarul palpatorilor si pozitionarea acestora. Informatia de masurare este preluata initial de palpatori mecanici care au asociati traductori de semnal, care se conecteaza la module electronice de analiza si decizie.
Utilizarea configuratiilor modulare electronice de masurare si decizie prin variabile si corelatii prescrise ofera posibilitatea asigurarii unor functii complexe de calcul si corelare. Conceperea unui post de inspectie caracteristici functionale si structurale performante, impune si asigurarea unui grad deosebit de inalt de flexibilitate solutiei elaborate.
În cazul prezentat, solutia gasita prezinta o serie de avantaje importante:
Ø Posibilitatea schimbarii rapide a modulelor pentru masurarea altor tipuri de piese;
Ø Gama mare de determinari - dimensiuni interioare, exterioare si abateri de forma;
Ø Automatizarea completa a sistemului;
Ø Posibilitatea integrarii intr-o linie de fabricatie automata modularizata;
Ø Posibilitatea interpretarii computerizate a datelor obtinute in urma masurarii
Generarea de decizii privind reglajul masinilor prelucratoare.
Cuplarea sistemului de inspectie cu dispozitive de alimentare si stocare adecvate asigura autonomie de functionare si cresterea substantiala a productivitatii operatiei de inspectie.
Pentru incadrarea in tendinta actuala de modernizare si eficientizare a inspectiei, sistemul analizat i se asigura comanda si inspectia procesului prin cuplarea la un sistem computerizat, sistem ce constituie un nod din cadrul unui sistem central de conducere si control/inspectie a intregului proces de fabricatie.
Domeniul de masurare influenteaza postul de masurare prin alegerea adecvata a cursei palpatorilor si a elementelor de pozitionare a piesei, iar forma piesei va determina matricele de masurare pe baza carora se determina numarul palpatorilor si pozitionarea acestora. Informatia de masurare este preluata initial de palpatori mecanici care au asociati traductori de semnal, care se conecteaza la module electronice de analiza si decizie.
Modulul mecanic final este constituit din dispozitivul de sortare. Acesta asigura distribuirea pieselor mai inainte controlate spre diferite sisteme de stocare, in functie de rezultatele obtinute in urma prelucrarii informatiilor furnizate de procesul de masurare.
 Caracteristicile
constructive si functionale ale dispozitivelor de sortare sunt
dependente de: dimensiunile si masa piesei, calitate suprafetei
active, numarul de grupe de sortare si productivitatea impusa de
sistemul de control automat. Productivitatea sortatorului trebuie sa fie
cel putin la nivelul celorlalte module componente ale automatului,
insa uneori el este cel care limiteaza productivitatea
automatului prin conditiile functionare care i se impun. Dirijarea
pieselor spre sistemele de stocare specifice fiecarei clase dimensionale
se realizeaza cu clapete, cu jgheaburi mobile, cu impingator
sau cu aer comprimat in cazul pieselor de mici dimensiuni. Deplasarea
pieselor in cadrul sortatorului se poate face gravitational: prin
cadere libera sau prin alunecare pe plan inclinat, sau
fortat in cazul deplasarii pieselor pe plan orizontal, cu
ajutorul transportoarelor rotative sau cu banda. Pentru asigurarea unor
timpi de raspuns si actionare mici, deci a unor
productivitati ridicate, actionarea sortatoarelor este realizata
de cele mai multe ori cu electromagneti, independent pentru fiecare
grupa de sortare. În cazurile cand sunt necesare forte
sau curse mari se utilizeaza cilindri pneumatici sau motoare electrice
cuplate cu reductoare. O posibilitate de marire a fortei de actionare
este utilizarea unui amplificator mecanic comandat de un electromagnet,
utilizabil insa doar in cazul curselor mici datorita
cursei limitate a armaturii mobile a electromagnetului. Actionarea
modulului de sortare depinde direct de valorile de masurare, in
corelatie cu algoritmul de sortare prestabilit. Pentru a coordona aceste
doua variabile, informatiile sunt preluate de un bloc electronic ce
indeplineste functiile de analiza si decizie, in care este implementata
si logica de comanda.
Caracteristicile
constructive si functionale ale dispozitivelor de sortare sunt
dependente de: dimensiunile si masa piesei, calitate suprafetei
active, numarul de grupe de sortare si productivitatea impusa de
sistemul de control automat. Productivitatea sortatorului trebuie sa fie
cel putin la nivelul celorlalte module componente ale automatului,
insa uneori el este cel care limiteaza productivitatea
automatului prin conditiile functionare care i se impun. Dirijarea
pieselor spre sistemele de stocare specifice fiecarei clase dimensionale
se realizeaza cu clapete, cu jgheaburi mobile, cu impingator
sau cu aer comprimat in cazul pieselor de mici dimensiuni. Deplasarea
pieselor in cadrul sortatorului se poate face gravitational: prin
cadere libera sau prin alunecare pe plan inclinat, sau
fortat in cazul deplasarii pieselor pe plan orizontal, cu
ajutorul transportoarelor rotative sau cu banda. Pentru asigurarea unor
timpi de raspuns si actionare mici, deci a unor
productivitati ridicate, actionarea sortatoarelor este realizata
de cele mai multe ori cu electromagneti, independent pentru fiecare
grupa de sortare. În cazurile cand sunt necesare forte
sau curse mari se utilizeaza cilindri pneumatici sau motoare electrice
cuplate cu reductoare. O posibilitate de marire a fortei de actionare
este utilizarea unui amplificator mecanic comandat de un electromagnet,
utilizabil insa doar in cazul curselor mici datorita
cursei limitate a armaturii mobile a electromagnetului. Actionarea
modulului de sortare depinde direct de valorile de masurare, in
corelatie cu algoritmul de sortare prestabilit. Pentru a coordona aceste
doua variabile, informatiile sunt preluate de un bloc electronic ce
indeplineste functiile de analiza si decizie, in care este implementata
si logica de comanda.
Volumul de stocare al sortatorului trebuie corelat cu dimensiunile pieselor de masurat, pentru a se asigura autonomia in functionare nesupravegheata impusa. Pentru piesele cu suprafete exterioare superfinisate, care trebuie protejate, se are in vedere un mod de depozitare fara contact pe suprafetele in cauza.
Pentru a indeplini cerintele legate de viteza, tactul de lucru si implicit productivitate, timpul de raspuns, flexibilitate in configurarea numarului de clase de sortare, pentru un interval dimensional cat mai mare si o autonomie de functionare maxima se concepe urmatoarea structura de sistem de sortare: set de trei sisteme de sortare de conceptie modulara si conectare in serie, cu clapete lungi actionate cu cilindri pneumatici cu simpla actiune, optional cu electromagneti si avand cutii de stocare incluse. O imagine de ansamblu a sistemului de sortare se poate vedea in reprezentarea din fig.7.
Aceasta solutie inglobeaza urmatoarele avantaje:
Ø sistemul de sortare cu clapete asigura timpi de actionare redusi si deci si productivitati mari datorita faptului ca au momente de inertie mici la clapete, iar rotatia clapetelor se realizeaza fara piesa, inainte de sosirea ei; in plus, utilizarea clapetelor lungi si foarte lungi conduc la reducerea timpilor de inchidere - deschidere datorita unghiurilor de rotatie micsorate odata cu crestere lungimii clapetelor;
Ø structura modulara asigura flexibilitate in configurarea numarului de clase de sortare cerut, fara a se mari nejustificat gabaritul sortatorului si costul acestuia; el va contine numarul optim de module identice, care se vor interconecta in serie;
Ø o unitate a setului permite sortarea unor piese ale caror dimensiuni pot varia in limite considerabile, fara a face nici un reglaj sau modificare a structurii initiale, iar prin schimbarea unitatii cu cea consecutiva plaja de variatie dimensionala acceptata se dubleaza fata de valoarea unitatii precedente;
Ø cutiile de stocare incluse ofera o solutie completa de sortator; accesul la acestea se poate realiza din doua directii, iar volumul acestora este ridicat
Ø actionarea pneumatica cu cilindri cu simpla actiune ofera durabilitate in functionare si un cuplu ridicat; pentru reducerea in continuare a timpului de raspuns se pot utiliza electromagneti
Ø modulele sunt realizate din materiale comune si partea de actionare contine elemente cu un cost moderat
Modulul de sortare este compus dintr-un numar de unitati identice, care la randul lor reprezinta module separate. Acestea se conecteaza in serie pentru a se obtine numarul de clase de sortare dorit.
O unitate modulara contine cinci cai de sortare si stocare, selectate prin rabaterea controlata a patru clapete. În pozitia de repaus a clapetelor, traseul central este liber, fiind destinat dimensiunii de piesa cu frecventa cea mai mare de aparitie. În cazul conectarii in serie a mai multor unitati modulare, traseul central reprezinta calea de tranzit spre unitatea urmatoare. Astfel daca sunt conectate mai multe unitati, doar ultima va asigura cinci clase dimensionale, cele dinaintea sa asigurand cate patru grupe dimensionale.
 Numarul
posibil de clase dimensionale care pot fi asigurate cu un set de patru
unitati modulare se poate vedea in tabelul 3.
Numarul
posibil de clase dimensionale care pot fi asigurate cu un set de patru
unitati modulare se poate vedea in tabelul 3.
Fiecare unitate modulara are atasate cutii de stocare, corespunzatoare fiecarei clase dimensionale. Pentru golirea cutiilor se rabat usile prevazute cu articulatii cilindrice cu revenire. Toate unitatile modulare de sortare au usile cutiilor centrale de stocare in pozitie deschisa, pentru a se putea asigura trecerea pieselor care nu au fost stocate in unitatea respectiva spre unitatile urmatoare, prin intermediul cuplajelor flexibile.
O unitate modulara poate functiona la inclinari intre 15 si 90 fata de planul orizontal. În cazul conectarii acestora in serie, ele se vor gasi sub unghiuri de inclinare de cel mult 75 , pentru a se facilita accesul la cutiile de stocare. Dispunerea unitatilor pe verticala confera modulului de sortare o configuratie compacta, raportata la numarul de grupe dimensionale pe care le poate asigura.
Utilizare configuratiilor modulare electronice de masurare si decizie asupra calitatii masurandului prin variabile si corelatii prescrise ofera posibilitatea asigurarii unor functii complexe de calcul si corelare. Acestea sunt caracterizate prin versatilitate, viteza de raspuns, rapiditate in masurare si decizie, automatizarea si centralizarea informationala a deciziilor, telecomanda, etc.
Sistemele modulare electronice de decizie sunt formate din asociatii specifice temei de inspectie din module independente sau integrate tipizare pentru: alimentare, masurare, operare si clasificare dimensionala. Elementul central de procesare al informatiilor este un microprocesor sau microcontroller, conectat cu celelalte elemente pe o placa de circuit imprimat sau chiar cel dintr-un calculator personal, prevazut cu o interfata corespunzatoare comunicarii cu celelalte componente ale sistemului.
Solutia pentru comanda automatului, care a fost proiectata, realizata si testata integral de catre colectivul de cercetare, a fost cea cu microcontroller 80C552, prin intermediul sistemului de dezvoltare IMC-500. Schema bloc a sistemului de comanda cu microcontroller este prezentat in figura 8.
PC-ul din figura intervine numai in faza de dezvoltare a programelor, sistemul de comanda cu microcontroller proiectat pe baza acestei faze urmand, a fi complect independent si putand comunica, prin intermediul unei tastaturi, si a unui afisaj proprii cu exteriorul.
 Figura
8. Schema bloc a controlului cu ajutorul sistemului de dezvoltare IMC-500
Figura
8. Schema bloc a controlului cu ajutorul sistemului de dezvoltare IMC-500
Dupa cum se poate observa, exista mai multe categorii de semnale de intrare si de iesire din modulul de analiza, decizie si comanda. O prima categorie de semnale de intrare este cea de la senzorii pozitionati pe modulele componente ale sistemului. În cadrul modulului de alimentare exista un o categorie de senzori pentru determinarea volumului de piese disponibil la un moment dat in alimentator. Astfel se pot capta trei semnale, corespunzatoare existentei unei cantitati corespunzatoare de piese, un semnal in cazul scaderii acesteia la un nivel de atentie si un semnal de alarma in cazul absentei totale a pieselor, unitatea de inspectie trebuind sa opreasca imediat functionarea sistemului la primirea acestui semnal.
A doua categorie de semnale de intrare sunt cele care contin informatiile de masurare ale masurandului. Ele sunt intr-o prima faza marimi mecanice, deplasarile fiecarui palpator care vine in contact cu piesa. Urmeaza apoi traseul unui lant de prelucrare a informatiilor: sunt amplificate, transformate in marime electrica analogica de catre un traductor, convertite in semnal digital de un convertor analog - numeric si apoi trimise pe mai multe canale sau multiplexat pe un singur canal blocului de analiza si comanda.
Dupa ce sunt prelucrate conform unei logici de comanda implementata dinainte, aceste semnale sunt trimise la iesire, cu diferite destinatii. Informatiile de la toti palpatorii ce vin in contact cu piesa pot fi afisate sau memorate in forma initiala sau mai intai supuse unor operatii matematice pe baza unui algoritm prestabilit si mai apoi afisate, memorate sau inregistrate pe diferite suporturi.
Pe baza acestor informatii prelucrate, care au ca sursa informatiile primare trimise de catre palpatorii modulului de masurare se trimit si semnalele de comanda, amplificate la un nivel de putere corespunzator, modulului de sortare pentru actionarea clapetelor de asemenea maniera incat piesa masurata sa ajunga in magazia corespunzatoare sortului din care face parte.
Sintetizat, se poate reprezenta dispunerea senzorilor pe module si elementele cinematice active actionate ca reactie a semnalelor primite de la ele.
|
Modul |
Senzori (semnale de intrare in MADC) |
Elemente cinematice active (semnale de iesire din MADC) |
|
Alimentare, dozare, trasport |
-senzor prezenta piese -traductor de turatie -senzor de inclinare -senzor prezenta piese pe calea de transport - senzor de numarare piese |
-motor de antrenare alimentator -motor de inclinare cuva -motor de antrenare transportor |
|
Masurare |
-senzor de prezenta piese in postul de masurare -senzor de capat de cursa ptr. cilindri -traductor incremental de rotatie -palpatori+traductori |
-cilindrii de manipulare ai pieselor -cilindru de deplasare cap de masurare -motor de antrenare masurand |
|
Sortare |
-senzor prezenta piese |
-cilindri/electromagneti ptr. actionare clapete |
Tab.4. Dispunerea senzorilor si elementelor cinematice pe module
Blocul electronic integreaza logica de comanda prezenta sub forma unui program de calculator, care in functie de parametrii specifici ai fiecarui modul, transmisi de senzorii montati pe acestia si de informatiile de masurare receptionate va comanda si actiona fiecare element cinematic al sistemului modular de inspectie dimensional. Acelasi bloc electronic asigura sincronizarea deplasarilor in cadrul fiecarui modul al pieselor care se masoara.
Programul de
comanda a fost structurat in 4 faze: Faza de initializare, in cadrul careia:se
afiseaza INITIALIZARE; se retrag toti cilindrii in
starea initiala; se verifica toate pozitiile cu ajutorul
semnalelor de la microintrerupatoarele respective; se verifica
prezenta pieselor pe sistemul de transport; se initializeaza
conversia analog numerica, printr-o masurare "in gol". Faza de parametrizare, in cadrul
careia: se afiseaza la inceput INTRODUCERE PARAMETRI, iar
dupa o mica temporizare, se afiseaza succesiv mesaje care
comunica operatorului ce parametri trebuie introdusi, sub ce
forma si in ce ordine; se introduce: numarul de clase
in care se face sortarea, marimea campului pentru fiecare
clasa; se realizeaza etalonarea; se introduce numarul de cicluri
etc. Faza de lucru, in cadrul
careia se relizeaza cicluri repetate de: alimentare, transport, dozare, masurare si sortare. Faza de asteptare (stand-by),
in cadrul acestei faze aparatul isi reduce la minim consumul
de energie electrica si asteapta atingerea unei taste
pentru reactivare si afisarea unor mesaje, care sa indice
operatorului ce actiuni trebuie sa intreprinda in
continuare.
Pentru a realiza toate aceste functiuni respecta modelul cibernetic de functionare, de interactiune cu mediul, cu date de intrare analizate si transformate corespunzator logicii de comanda si date de iesire, la un nivel de putere mai mare. Pe baza pozitiei de dispunere a elementelor motoare in cadrul fiecarui modul si tinand cont de rolul lor functional, precum si de succesiunea desfasurarii operatiilor la parcurgerea completa a traseului sistemului de masurare de catre piesele de masurat, rezulta ciclograma de functionare, realizata mai intai separat pentru fiecare modul, iar apoi sintetizata pentru intreg sistemul.
O etapa importanta in cadrul cercetarilor a urmarit realizarea bazelor de date si a programelor de tip conversational care sa asigure generarea de structuri modulare optimizate in functie de criteriile agreate de beneficiar (fig. 9). În structurarea bazelor de date si a softurilor aferente s-a urmarit asigurarea unui acces facil si deosebit de eficient, precum si o manevrabilitate crescuta a acestora. Si softurile generate au fost gandite in varianta modulara, cu posibilitati de dezvoltare in sistem arborescent.
Prin intermediul programelor realizate, bazele de date sunt gestionate in functie de solicitarile si conditiile impuse de utilizatori. Un prim modul de programare gestioneaza datele legate de tipul de control: activ-pasiv-statistic. Un al doilea modul face analiza caracteristicilor piesei si a parametrilor controlati la aceasta in concordanta cu baza de date specifica tipurilor de piese, dar si in functie de datele furnizate de utilizator. Pe baza datelor suplimentare, date caracteristice aplicatiei solicitate de beneficiar, modulul de optimizare genereaza un model al structurii modulare de inspectie dimensionala solicitata. În cazul validarii solutiei propuse, intra in actiune modulele de generare a componentelor modulare ce formeaza structura analizata.
În figura 9. sunt prezentate o serie de ferestre conversationale generate de softurile ce gestioneaza bazele de date realizate. Forma conversationala aleasa asigura un permanent si facil dialog intre sistemul informatic si utilizator. În acest fel, colectivul de autori si-a propus sa realizeze un instrument util si deosebit de eficient destinat restructurarii si modernizarii sistemelor automate de inspectie dimensionala si asigurarea calitatii.
La finalul acestei cercetari, colectivul de autori a realizat o evaluare a rezultatelor si a sintetizat o serie de concluzii:
ØColectivul de autori a indeplinit toate obiectivele stabilite pentru aceasta etapa, prin adaptarea la conditiile impuse de prezentul contract.
ØSolutia propusa aliniaza conceptia asupra automatelor de inspectie, la care se refera, la nivelul mondial actual.
ØPe baza studiilor efectuate s-a trecut la realizarea unei baze de date care sa permita alegerea, cu ajutorul calculatorului, a structurii modulare optime pentru fiecare tip de masurand in parte.
ØPrin cercetarile efectuate si cele ce vor urma se realizeaza perfectionarea bazei didactice si de cercetare la care vor avea acces larg toti specialistii in domeniu, dar in mod deosebit studentii si absolventii sectiilor de Mecanica fina, Mecatronica, a Colegiului de Controlul calitatii, precum si a celui de Tehnologii de Mecanica fina.
ØInteresul deosebit manifestat de S.C. Rulmentul S.A. si ICSITROA Brasov in aplicarea rezultatelor obtinute pe baza acestui program fac posibila implementarea imediata a acestor solutii si definirea de noi directii comune de cercetare.
ØLa solutionarea obiectivelor propuse au participat alaturi de cercetatori cu experienta si 6 studenti ai sectiilor de Mecanica fina, Mecatronica, SAMA si studii aprofundate.
ØDerularea cercetarilor a permis parcurgerea etapelor din programele de doctorat ale cercetatorilor doctoranzi, doi dintre ei (Luculescu Marius si Mara Liviu) fiind in faza de definitivare a tezelor de doctorat.
ØCa rezultat al formarii si perfectionarii tinerilor cercetatori doi dintre tinerii echipei de cercetare au sustinut colocviul de admitere la doctorat.
ØActivitatile desfasurare in cadrul proiectului au antrenat pe langa studentii cuprinsi in echipa de cercetare si alti studenti. Un interes deosebit au manifestat studentii anului VI, V-ingineri Mecanica fina si anul III -colegiu tehnic de Tehnologii de Mecanica fina.
ØTinand cont de schimbul de studenti dintre Universitatea "Transilvania" Brasov (Facultatea de Mecanica) si universitati de prestigiu din U.E, in cadrul programului Socrates, proiectul a contribuit substantial la cresterea calitatii procesului de invatamant oferit studentilor oaspeti.
ØLarga participare a cadrelor didactice din catedra, dar si cu implicarea studentilor prin lucrari de diploma si de disertatie adecvate, fapt care asigura in acelasi timp un acces larg al cadrelor didactice si studentilor la dotarea si rezultatele obtinute cu ajutorul acestui program.
ØÎn cadrul primei etape a proiectului s-a realizat (in limita fondurilor alocate) imbunatatirea dotarilor existente in laboratoarele: Automate de inspectie si de servire, Sisteme si tehnologii de inspectie si deservire, Tehnica prelucrarii informatiei, Aparate si sisteme de masura si control, Analiza si Modelarea sistemelor mecatronice si Proiectare asistata de calculator, aflate in componenta Catedrei de Mecanica fina si Mecatronica din cadrul Universitatii Transilvania Brasov.
ØPrezentarea rezultatelor obtinute, pe baza acestui contract, in cadrul manifestarilor stiintifice nationale si internationale, a asigurat premisele unor noi colaborari in acest domeniu, si deci, continuarea cercetarilor in conformitate cu noile conditii impuse.
Prin analiza rezultatelor si concluziilor obtinute pe baza acestui program, s-au stabilit, la nivelul colectivului de autori, noi strategii de dezvoltare sustinute de cerintele concrete ale utilizatorilor industriali in acest mod asigurandu-se premisele unor noi colaborari in acest domeniu, si deci, continuarea cercetarilor in conformitate cu noile conditii impuse.
BIBLIOGRAFIE SELECTIVA
Balachandra R. Modular Design and Technological Innovation, The Information Storage Industry Centre, Report 2002-02, Univ. Of California.
Bucsan, C., Bucsan, G., Kifor, C.,V.: Sisteme de management al calitatii - abordare informatica, Ed. Medro, Bucuresti, 2003.
Fatikow S, Rembold U,: Tehnologia microsistemelor si robotica, Editura Tehnica, Bucuresti,1999.
Intelligent Sensors and Measuring Systems - MEL - MIKROELEKTRONIK GMBH- Eching, Germania.-2004.
Kovacs, F. & Tusz, F. : The future's factory. In: "Multimedia International" Publishing House", Arad, 1999.
Hilton, Mark : Modular products - Paving the path to interconnectivity, PRIMEDIA Intertec Jul/Aug 1999, California.
Ping Fu:Computer -aided inspection, Appliance Manufacturer, Vol. 51, Iss. 8; aug. 2003,
Popovic, D., Vlacic, L.,: Mechatronics in engineering design and product development, Marcel Dekker, Inc., New York, 1999.
IVP RANGER M50/M40 - product information - 2004.
Simionescu, I.: Models for optimal control of distributed parameter systems, "Tehnica", (Ed), ISBN - 845- 98400-0-3, 1998, Bucuresti.
Spizzamiglio A.: Laser Technology Improves and Makes Easier Post-Process Measuring, - Aeroel - Italia, 2001.
Catalog produse, -Marposss -2003, 2004; MITUTOYO - 2003, 2004.
Copyright © 2026 - Toate drepturile rezervate