|







 |  |
|
| |
 | Biologie | Chimie | Didactica | Fizica | Geografie | Informatica |
| Istorie | Literatura | Matematica | Psihologie |
Mach3 CNC Controller
Software-ul de instalare si Configurare
V3

Capitolul 1
Introducere in CNC Systems.
Acest capitol va introduce la terminologia utilizata in cuprinsul acestui
manual si explica scopul diferitelor componente intr-un computer controlat
numeric (CNC).
Inainte de a incepe .
Orice masina unealta este potential periculoasa. CNC sunt potential mai
periculoase manuala decat cele pentru
ca, de exemplu, un computer este destul de pregatit pentru a roti un 8
'dezechilibrata din fonta, de patru
maxilarului Chuck la 3000 rot / min, pentru a se apuca de treaba un panel-teren
router cutter adanc intr-o bucata de lemn de stejar, sau sa moara departe de cleme exploatatie
dumneavoastra de lucru la masa.
Acest manual Incearca sa-ti dau orientari cu privire la siguranta si tehnici de
precautie, dar pentru ca noi nu cunosc
detalii despre masina dvs. sau de conditiile locale putem accepta nici o
responsabilitate pentru indeplinirea de
orice masina sau de orice daune sau prejudiciul cauzat de utilizarea sa. Este
responsabilitatea dumneavoastra sa va asigura ca intelegeti implicatiile a ceea ce aveti de proiectare si de a construi
si conforma cu legislatia si codurile de
practica se aplica pentru tara dvs. sau de stat.
Daca va aflati in orice indoiala, sa fie sigur de a cauta de orientare
profesional de la un expert calificat, mai degraba decat riscul de ranire a tine sau pentru
altii.
1.1Introducere
Acest document va spune cum sa instalati si sa configurati Mach3Mill software
pentru a controla un router masina unealta sau similare. Aceasta descrie, de
asemenea, componentele hardware necesare si modul de interfata pe computer. Exemplu tipic de masini unelte
care pot fi controlate sunt routere, si plasma taiere tabele. Un document separat, folosind Mach3Mill, explica modul de
utilizare a Mach3Mill dupa ce ati instalat si configurat Mach3Mill.
Va fi nevoie sa cititi aceast DOCUMENTATIE! Mach3 este un software complex.
Nu va fi de succes daca incepeti, pur si simplu . In timp ce aceasta abordare poate fi potrivite pentru unele software, nu este
potrivit si pentru Mach3. Salveaza o multime de tinp parcurgind capitolele din acest manual, tinand de instalare si
configurare pas cu pas.
Un document in format online, wiki, Mach Personalizare Wiki (link-ul de la www.machsupport.com /MachCustomizeWiki/index.php?title=Main_Page),
explica in detaliu cum sa-si modifice
ecran machete, de a elabora propriile ecrane si Wizards, si de a interfata
hardware pentru diferite dispozitive speciale.
ArtSoft SUA recomanda insistent sa va alaturati unuia sau ambelor forumuri pentru
Mach3. Link-uri pentru a va alatura sunt
la www.machsupport.com. In timp ce aceste forumuri au multi ingineri si machinists cu un mare varietate de experienta ca participanti,
acestea nu constituie un substitut pentru o masina unealta a producatorului suport de retea. Daca cererea dumneavoastra
este necesara ca nivelul de suport, atunci ar trebui sa-ti cumperi CNC de sistem de la un distribuitor local sau
de un OEM, cu o retea de distributie. In acest fel vei primi beneficiile Mach3
cu posibilitatea de a intra pe site-ul suport.
Dreptul de a face copii ale acestui manual se acorda numai in scopul de a
evalua si / sau folosi licenta sau demonstratie copii ale Mach3. Aceasta nu
este permisa, in conformitate cu acest drept, pentru terte parti pentru a copii tarifate ale acestui manual.
Toate eforturile au fost realizate pentru a face ca acest manual complet si cat
mai exacte posibil, dar nu garanteaza in niciun fel sau de fitness este implicat. Informatiile
furnizate este 'ca atare'. Autorii si editor nici nu trebuie sa aiba responsabilitatea raspunderii in nici nu fel orice persoana fizica sau
juridica cu privire la orice pierdere sau daune care rezulta din informatiile continute in acest manual. Modul de
utilizare a manualului este acoperit de licenta conditiile in care trebuie sa fiti de acord, atunci cand instalati Mach3
software.
ArtSoft SUA este dedicat imbunatatirea continua a produselor sale. Sugestii
pentru imbunatatiri, corectii, si clarificari le primim cu recunostinta.
1.2Componenta unui sistem de prelucrare
CNC
Principalele componente ale unui sistem de CNC sunt prezentate in figura 1.1.
Acestea sunt:
1. A Computer Aided Design / Computer Aided Manufacturing (CAD / CAM) program.
Partea
proiectantul foloseste CAD / CAM program pentru a genera o iesire fisier numit
parte de program. De parte a programului,
de multe ori este scris 'GCode', descrie masina si etapele necesare
pentru a face partea dorita. De asemenea, puteti crea un program GCode manual.
2. Un mediu de transfer de fisiere, cum ar fi o unitate flash USB, floppy-disk,
sau link-ul de retea, transferuri de iesire
de CAD / CAM la un program de masini Controller.
3. O masina Controller. The Machine Controller citeste si interpreteaza partea
de program pentru a controla cu
instrumente care vor reduce timpul de lucru. Mach3, care ruleaza pe un PC,
efectueaza Machine Controller functie si
trimite semnale de la unitati.
4. De unitati. Semnalele de
5. Masina unealta. Axele masinii sunt mutate de suruburi, rafturi sau de
siguranta care sunt alimentate de servo
motoare sau stepper motoare.
Figura 1.1: Principalele parti ale unui sistem CNC
Desi o
masina de frezat este ilustrata, masina ar putea fi un router sau o plasma sau
laser cutter.
In cazul in care interfetele exista, in plus fata de controlul instrument
pozitia masinii Controller poate porni si opri de arbore motor, control viteza, turn de racire si de pe jos, pentru a
verifica faptul ca o parte a programului de comenzi sau operatorul nu se incearca sa se mute
orice masina axei sale dincolo de limite.
The Machine Controller poate avea, de asemenea, butoane de control, o
tastatura, potentiometru knobs, un
manual generator de impulsuri (MPG) volan, sau un joystick-ul, astfel incat
operatorul poate controla masina manual
si de a porni si opri rularea programului. The Machine Controller dispune de o
astfel de afisare ca operatorul sa stie
ce se intampla.
Deoarece comenzile unui program poate solicita GCode complicat coordonand
miscari ale masina pe axe, masina
Controller trebuie sa fie capabil de a efectua o serie de calcule in 'timp
real' (de exemplu, taiere o spirala
necesita o multime de trigonometrice de calcul). In trecut aceasta a facut
masina foarte scumpa.
1.3How Mach3 Fits In
Mach3 este un pachet software care ruleaza pe un PC sil transforma intr-un foarte puternic si economic Masina pentru a inlocui Controller (3), in figura 1.1.
Pentru a
rula Mach3, ai nevoie de un calculator care ruleaza Windows 2000, Windows XP
sau Windows Vista pe 32 de biti sistem de operare. (Windows Vista poate
solicita ca un registru de patch-uri, disponibile la www.machsupport. ro.) ArtSoft SUA recomanda cel putin un
procesor 1GHz cu un 1024 x 768 pixeli rezolutie ecran. O masina de birou va oferi mult o performanta mai buna decat cele
mai multe laptop-uri si incontestabil mai ieftin. Puteti folosi acest computer
pentru orice alte functii in atelier (cum ar fi (1), in Figura 1.1 -- ruleaza un CAD / CAM pachet) atunci cand nu
este controlul masinii.
Mach3 si sa port paralel driverul comunica cu hardware-ul printr-o masina (sau,
optional, doua) paralel (imprimanta)
porturi. In cazul in care computerul nu are un port paralel (mai multe si mai
multe computere sunt construite fara el),
puteti cumpara o motiune controler de bord de la un tert furnizor care
utilizeaza un port USB sau Ethernet
pentru comunicare. Utilizati o motiune de controler de bord poate elimina
considerabil de prelucrare a incarca de
pe calculator, asa ca poate doriti sa ia in considerare utilizarea de a obtine
o performanta avantaj chiar si in cazul
in care computerul nu au un port paralel disponibile. Mach3 genereaza pas
impulsurile si semnale de directie
pentru a efectua pasii definit de o parte de program GCode si trimite-le la
port (s) controler de bord sau de
miscare.
Driverele pentru masina dvs. a
axei motoare trebuie sa accepte March3 a pas impulsurile si semnale de
directie.
Practic toate stepper motor driver-ele de lucru in acest fel, la fel ca si
moderne DC AC servo cu sisteme digitale codificatoare.
Atentie, daca nu sunteti de conversie a unei vechi NC masina al carei servos
pot utiliza resolvers pentru a masura pozitie a axelor ca va trebui sa ofere o noua unitate pentru fiecare
axa.
Pentru a stabili un sistem de CNC pentru a utiliza Mach3, trebuie sa instalati
Mach3 software-ul de pe computerul dumneavoastra, si corect, conectati-va pentru a conduce
autovehicule a computerului porturi. Aceste operatii sunt descrise in
urmatoarele capitole.
1.4 Ce poate face Mach3
Mach3 este un program foarte flexibil, proiectat pentru a controla, cum ar fi
utilaje freze, strunguri,
plasmatice taietori, si routere. Caracteristici ale acestor sisteme, care sunt
folosite de catre Mach3 includ:
. Unele controale utilizator. O oprire de urgenta (opri) buton trebuie sa fie
oferite pe fiecare masina.
. Doua sau trei axe de miscare, care sunt, de obicei, de la dreapta la fiecare
alte unghiuri (la care se face referire ca X, Y, si Z).
. Un instrument care se muta de la un lucru. De origine a axelor de referinta
se stabileste in raport cu de lucru.
Relativa circulatie poate fi de (1), instrument de miscare (de exemplu, de o
pana de morarit ax muta instrument in
directia Z, sau a unui cutit de strung montat pe un cross-slide si o sa muta instrument in directiile X si Z), sau de
(2) si tabelul de lucru in miscare (de exemplu, pe un genunchi tip mill tabelul se muta in X, Y, Z si
directii in timp ce instrumentul ramane fix in ax).
Si la alegere:
. Unele comutatoare de spus in cazul in care instrumentul este in
'Home' pozitie.
. Unele switch-uri pentru a defini limitele permise relativa circulatie a
instrumentului.
. Un controlate 'ax.' The ax poate roti instrument (mil.) sau de
lucru (cotitura).
. Pana la alte trei axe. Acestea pot fi fie rotative (de exemplu, deplasarea
lor se masoara in grade) sau liniara.
Una dintre axele liniare suplimentare pot fi slaved
. Un comutator sau switch-uri care se imbuca gardienii pe masina.
. Controale pentru modul in care este livrat de racire (de inundatii si / sau
Mist).
. O sonda in instrument care permite titularului digitizarii unei existente
parte.
. codificatoare, cum ar fi liniara bareme de sticla, care poate afisa pozitia
parti ale masinii.
. functii speciale.
Cele mai multe conexiuni intre masina dvs. si PC-ul sa ruleze Mach3 sunt efectuate
prin intermediul paralel (imprimanta)
port (s) de la computer. O simpla masina va avea nevoie de doar un singur port;
un complex va avea nevoie de o doi.
Conexiunile de control de functiile speciale ca un LCD, un instrument-changer,
axa cleme, sau un
swarf transportor poate fi, de asemenea, efectuate prin intermediul unui
dispozitiv ModBus (de exemplu, un PLC sau Homann Designs ModIO controller).
Butoanele pot fi interfaced de o 'tastatura emulator', care genereaza
pseudo-cheie prese de raspuns in la
semnalele de intrare.
Mach3 va controla pana la sase axe simultan, coordonarea lor circulatie cu
interpolare liniara
sau efectua interpolare circulara pe doua axe (din X, Y sau Z), in timp ce
simultan liniar
interpolating celelalte patru cu unghi fiind swept de interpolare circulara. Instrumentul
poate, astfel, muta intr-o ingusteaza
elicoid cale, daca este necesar! Rata de alimentare in timpul acestor miscari
este mentinuta la nivelul de valoare solicitate de partea ta de program, sub rezerva limitarilor de
acceleratie si de viteza maxima de axe.
Va puteti muta de axe de mana, cu diferite controale de jogging.
Daca mecanismul de masina dvs. este ca un robot de brat sau o hexapod, Mach3
apoi nu va putea sa de control, pentru
ca a cinematic calcule ca ar fi necesara pentru a se refera la
'instrument' de pozitie in X, Y
si Z coordonate la lungimea si de rotatie a masinii de arme. Mach3 pot comuta de pe ax, prin rotatie, in
ambele sensuri, si trece-l jos. De asemenea, poate controla rata la care acesta roteste (rot / min) si
monitorizeze pozitia unghiulara pentru ca operatiunile de taiere fire.
Mach3 pot transforma cele doua tipuri de racire si dezactiva.
Mach3 va monitoriza si poate impiedica de a comuta ia nota de functionare a
switch-uri de referinta, de garda
conexa, iar limita comutatoare Mach3
poate stoca de proprietati de pana la 256 diferite instrumente. In cazul in
care, cu toate acestea, masina dvs. are un automata instrument de schimb sau de revista, va
trebui sa-l controla pe tine. Mach3 prevede programul macro capacitate, dar trebuie sa faci programare.
Capitolul 2 Instalarea Mach3 Software
Daca nu ati facut-o deja, download de software-ul de
Daca ati cumparat un sistem complet CNC de la un revanzator, apoi in tot sau in
pasi de instalare
descris in acest capitol mai au fost deja facut pentru tine.
2.1Installation
Mach3 este distribuit de catre ArtSoft SUA pe Internet. Il descarcati pachetul
de instalare de autoreglementare ca o imagine
(care, in prezent de eliberare, este de aproximativ 25 MB). Cand instalat, se
va desfasura pe o perioada ca o
demonstratie versiune. Ca demonstratie de software, acesta plaseaza cateva
limitari privind de viteza, de
dimensiunea de locuri de munca, care pot fi intreprinse, precum si specialisti
cu caracteristici acceptate. Cand cumparati o licenta, puteti 'debloca' demonstrarea versiune aveti deja instalat
si configurat pentru a da complet
software-ul de functionalitate. Detalii de tarifare si optiunile sunt
disponibile la www.machsupport.com.
2.1.1 Descarcarea
Descarcati pachetul de instalare de la www.machsupport.com. Folositi butonul
dreapta al mouse-ului si Salvare
Tinta ca pentru a pune pe auto-a instala fisierul de pe desktop sau intr-un
folder convenabil. Ar trebui sa fie conectat
Cand dosarul a descarcat, se poate executa imediat, folosind butonul Deschidere
pe download
fereastra de dialog, sau de a descarca fereastra de dialog pot fi inchise si de
instalare facut mai tarziu. Cand vrei sa
faci de instalare, executati fisierul descarcat si ati salvat. De exemplu, daca
l-ai salvat pe fisier de instalare de pe
desktop, trebuie doar sa faceti dublu clic pe el. Daca l-ai salvat pe fisier
intr-un dosar, rula Windows Explorer
(click dreapta pe butonul Start), si faceti dublu-clic pe numele fisierul
descarcat in dosar.
2.1.2 Instalarea
Aceasta sectiune se va ghida pentru instalarea software-ului de
2.1.2.1 In cazul in care o masina
unealta este conectat, deconectati-l acum.
Nu aveti nevoie de o masina unealta conectat pentru a instala software-ul. De
fapt, daca sunt doar incepand este, probabil, mai bine sa nu aiba o legatura.
In cazul in care o masina unealta este conectat la computer, in cazul in care
nota de cablu sau de cabluri de la
masina de instrument sunt conectat
2.1.2.2 Executare a Mach3 software-ul de
instalare de pachete.
Cand executati fisierul descarcat, va fi ghidat de obicei prin masuri de
instalare pentru Windows program, cum ar
fi acceptarea conditiilor de licenta si selectand folderul pentru Mach3.
ArtSoft SUA va recomanda sa Mach3
permite sa isi utilizeze implicit folderul de instalare C: Mach3.
De imagine de fundal in timpul instalarii este standard Mach3Mill ecran - nu va
faceti griji, daca nu sunteti planificare
pentru a controla un strung, ca Mach3Turn este, de asemenea, sa fie instalat.
Vei fi intrebat daca doriti sa instalati programul diferite componente, dupa
cum se arata in figura 2.1:
Figura 2.1: Selectati programul de Componente Screen
Veti avea
nevoie de port paralel sofer in cazul in care utilizati computerul de port paralel
(e) de la interfata cu de masina
unealta. Daca utilizati un controler de miscare bord de la o terta parte care utilizeaza
distribuitor USB sau Ethernet, ar trebui
sa deselectati caseta de port paralel sofer.
The Wizards sunt un set de macro-uri care va permit sa va crea rapid GCode
sarcinilor comune pentru a face o astfel de bolt cercurile, buzunare, etc aproape sigur veti gasi aceste
util. Instalarea Wizards asemenea instaleaza Mach3 Addons pentru Mill, desi au nevoie de o licenta de activare.
De XMLs sunt fisierele care detin Mach3 de informatii de configurare. Exista
trei implicit. XML fisiere:
Mach3Mill.xml, Mach3Turn.xml, si Mach3Plasma.xml. Acestea va dau un cunoscut
incepand punct pentru a crea propria
dvs. personalizat profiluri. ArtSoft SUA recomanda ferm sa va creati
personalizat profiluri de propriul loc
de a modifica profilul implicit (e). Daca ati modificat anterior unul sau mai multe dintre implicit profiluri,
cu toate acestea, si nu doriti sa va suprascrieti informatii de
configurare, ar trebui sa debifati
caseta XMLs.
LazyCam este o versiune beta-importator incluse gratuit cu Mach3. Scopul
acestuia este de a dxf standard de import, cmx, precum si alte tipuri de fisiere, pentru a permite celor care nu
utilizeaza CAM programe pentru a genera mai multa usurinta GCode pentru a se executa in conformitate cu Mach3.
Nu aveti nevoie de el pentru a rula software-ul Mach3.
Ecranul Seturi Mach3 a defini aspectul ecranului. Cu exceptia cazului in care
le-ati creat propriul dvs. personalizat ecrane,
va dori aceste.
Cand ati selectat de componente pe care il doriti, faceti clic pe butonul
Urmatorul.
Procedura de instalare va intreba daca doriti sa creati un profil personalizat,
asa cum se arata in figura 2.2:
Figura 2.2: Crearea unui Custom Profil Screen
Dupa cum este descris anterior, ArtSoft SUA recomanda insistent sa crea profiluri de loc de de modificare a implicit profiluri. Acest ecran va permite sa clona una sau mai multe dintre implicit profiluri, atribuirea propriul nume la clonat profiluri. De exemplu, daca faceti clic pe Mill Profil buton, ecranul prezentat in figura 2.3 apare.
Figura 2.3: Creati Mill Profil
Introduceti
numele pe care doriti sa o alocati de profil (posibil 'MyMill') si faceti
clic pe butonul OK. Daca doriti, puteti
crea mai multe profiluri diferite. Cand le-ati creat personalizat de profil
(e), faceti clic pe Butonul Urmatorul.
2.1.2.3 Daca utilizati Windows Vista
Vista poate solicita ca un registru de patch-uri pentru Mach3 port paralel
sofer pentru a rula. (Daca utilizati un thirdparty motiune de controler bord, care comunica cu
USB sau Ethernet, in loc de port paralel conducator auto, care nu aveti nevoie de patch-uri.) In primul rand, nu
normal Mach3 instalare, apoi instalati plasture. De patch-uri sunt disponibile la
www.machsupport.com, impreuna cu orice informatii actualizate despre utilizarea
Windows Vista. Descarca de patch-uri ca
un fisier zip, salvati-o, si dezarhivati-l pentru a extrage fisierul
memoryoverride. reg. Faceti dublu-clic
pe numele de fisier pentru al executa. memoryoverride.reg modifica registry
pentru a permite Mach3 al driver pentru
a rula.
Acum, du-te
Acum tu ar trebui sa aiba posibilitatea de a rula Mach3. Incercati sa
drivertest.exe din nou, si ar trebui sa ruleze.
Nota: Puteti obtine erori raportate
atunci cand ruleaza DriverTest. De fapt, aceasta nu poate rula la toate prima
data, apoi Vista va va intreba daca
doriti sa rulati-l in modul de compatibilitate. Face acest lucru, si se va
desfasura.
2.1.3 vitale Reboot
Trebuie sa reporniti Windows, inainte sa fie difuzate Mach3. Acest lucru este
vital reboot. Daca nu o faci, vei primi mari
dificultati in care nu poate decat sa fie depasite prin utilizarea Windows
Panoul de control pentru a dezinstala driverul
manual. Deci, va rugam sa reporniti sistemul acum.
Daca sunteti interesat sa stie de ce este necesara repornirea sistemului, apoi
cititi mai departe. Daca nu, puteti trece la sectiunea 2.2.
Desi Mach3 va aparea pentru a fi un singur program, atunci cand se folosesc, de
fapt, aceasta este alcatuita din doua parti:
un conducator auto, pe care este instalat ca parte a Windows ca un driver de
imprimanta sau de retea, precum si un grafic interfata de utilizator (GUI).
De conducator auto este cel mai important si ingenios parte. Mach3 trebuie sa
aiba posibilitatea de a trimite foarte precis datate semnale de control al axelor de masina
unealta. Windows place sa fie responsabil. Se executa programe utilizator
normal atunci cand aceasta nu are nimic
de a face mai bine in sine. Pentru ca Mach3 de functionare este de timp atat de
critic, nu poate a fi un 'program
de utilizator normal.' Acesta trebuie sa fie la cel mai mic nivel din
interiorul Windows (care este, el se ocupa de intrerupe).
In plus, pentru a face acest lucru, la viteze mari, posibil, necesar (fiecare axa
poate fi acordata o atentie pana la
100,000 de ori pe secunda), conducatorul auto trebuie sa tune propriul cod.
Windows nu se aproba de acest lucru
(este un truc pe care joaca virusi), deci trebuie sa fie solicitat sa se acorde
permisiunea speciale. Acest proces necesita de a reporni. Deci, daca nu ati facut re-boot, apoi Windows va da ecran
albastru de deces si driverul va fi
corupt. Singura cale de iesire din acest manual este de a elimina driverul.
Avand Avand in vedere aceste avertismente infricosator, este corect sa spun ca
este necesara repornirea sistemului numai in cazul in care conducatorul
auto este, mai intai instalat. Daca va
veti actualiza sistemul cu o versiune mai noua, apoi la repornirea sistemului
nu este vital. De secventa de a instala
toate acestea, inca mai cere sa o fac. Windows XP porneste in mod rezonabil,
rapid, de aceea este nu prea grea pentru
a face acest lucru de fiecare data.
2.2Testing de instalare
Deci trebuie restartata! (Daca nu ati facut, ma intorc si citi Sectiunea
2.1.3.)
ArtSoft SUA recomanda acum testare a instalat sistemul. Asa cum am mentionat
mai sus, Mach3 nu este un simplu
program. Este nevoie de mari libertati cu Windows pentru a efectua sau loc de
munca; aceasta inseamna ca nu va functiona pe toate
ca urmare a sistemelor de mai multi factori. De exemplu, sistemul de
monitorizare a QuickTime (qtask.exe) executa in fundal poate ucide Mach3, si este posibil sa existe alte programe ce nu
sunt chiar la curent cu privire la dvs. sistem
care sa poata face acelasi lucru. Windows si nu poate incepe multe procese in
fundal. Niste apar ca pictograme in
system tray (dreapta jos a ecranului), in timp ce altele nu apar ele in
orice drum. Alte cauze posibile de
eratic operatiune sunt retea locala de conexiuni care pot fi configurate pentru a detecta automat viteza. Ar trebui sa
configurati aceste efective de viteza (10 Mbps sau 100 Mbps) din retea. In cele din urma, o masina
care a fost navigarea pe Internet poate avea una sau dobandita mai mult de o serie de 'robot' tip
de programe spion pe care ceea ce faci si trimite date pe 'net la originators lor. Acest trafic poate interfera
cu Mach3 si nu este ceva pe care doriti oricum. Utilizati o spyware scanare, cum ar fi Spybot,
disponibile de la www.safer-networking.org, pentru a localiza si a sterge
nedorite software-ul de pe masina.
Datorita acestor factori, este important, desi nu sunt obligatorii, pe care le
testa sistemul dvs., atunci cand suspecta
ceva este in neregula sau vrei doar sa verifice ca o instalare au mers bine.
2.2.1 Daca utilizati Implicit Portul
Paralel Driver
Daca utilizati un tert de controler de miscare in loc de driver de port paralel,
puteti trece peste aceasta sectiune.
Daca utilizati Mach3 port paralel conducator auto, este util de a infiinta un
icon pentru o comanda rapida pe desktop Mach3
program la altul. Utilizati Windows Explorer (clic-dreapta Start), navigati la
dosarul in care ati introdus Mach3
instalare, si a crea o comanda rapida pentru a DriverTest.exe prin
click-dreapta pe DriverTest.exe
filename. Glisati aceasta comanda rapida pe desktop. DriverTest.exe teste de
functionare de la portul paralel sofer.
Faceti dublu clic pe icoana DriverTest care tocmai l-ati creat, sau rulati programul
DriverTest.exe de
Figura 2.4: Rularea de DriverTest Program
Aveti
posibilitatea sa ignorati toate cutiile cu exceptia de impulsuri pe secunda. Ar
trebui sa fie destul de stabil
aleasa de dvs. in jurul nucleului puls frecventa (25000 Hz, 35000 Hz, etc.)
Parerea puls rata poate varia, Cu toate
acestea, chiar destul de wildly. Aceasta se datoreaza faptului ca Mach3
utilizeaza Windows ceas pentru a calibra sale puls timer si, peste o perioada scurta de timp scara,
Windows ceasul poate fi afectata de alte procese de incarcare a computerului.
Deci, s-ar putea sa fie de fapt, folosind un 'nesigure' ceas (Windows
unu) pentru a verifica Mach3 si asa obtine
falsa impresie ca Mach3 de timp este variabil.
DriverTest evalueaza puls curent si afiseaza un Puls Rating Timp de mai jos
Variante grafic.
In Figura 2.4, pulsul evaluare este excelent. Daca sistemul dvs. are mai multe
variante, pulsul evaluare poate fi buna,
corecta, sau de cei saraci. Daca vedeti un ecran similar cu Figura 2-4, cu doar
mici spikes pe Timer Variante grafic, un
numar constant de impulsuri pe secunda, si un lucru bun sau excelent clasament,
totul este de lucru bine. Inchideti
DriverTest de program si de a proceda punctul 2.3, descriind Mach3 Profile, de
mai jos.
Daca aveti probleme cu instalarea, se refera
2.3Mach3 Profile
Profil de fisiere (. Fisiere XML, stocate in Mach3 folderul de instalare) defineste
aparitia de operare si caracteristici
ale Mach3, care sa permita Mach3 pentru a fi configurat pentru a fi utilizate
cu diferite tipuri de masini: strunguri,
freze, plasma cutters, routere, etc Toate va setati optiunile de configurare
sunt salvate in profilul de fisiere pe
care le selectati.
Expertul de instalare creeaza spatiul de lucru pentru Mach3Mill icoane,
Mach3Turn, cu plasma, si Mach3 Loader. Mach3Mill,
Mach3Turn, si plasma sunt comenzi rapide care se executa Mach3 cu un profil
preconfigurate pentru o anumit tip de
masina. De profil pentru a utiliza este identificat printr-un '/ p'
argument in tinta de comenzi rapide. (Pentru
a vedea aceasta linie de comanda, faceti clic dreapta pe unul dintre comenzi
rapide pe desktop si selectati Properties din meniul de tip pop-up. Vezi, de asemenea, figura 2.7.)
Desi aveti posibilitatea sa utilizati o aceste comenzi rapide pentru a porni un
sistem de preconfigurate, ArtSoft SUA recomanda in care nu aveti. In schimb, ar trebui sa creati-va propriul profil (e).
Facand astfel, are doua avantaje importante:
. furnizate profiluri
(Mach3Mill.XML, Mach3Turn.XML, si Plasma.XML) nu va fi modificat
de catre dvs. de configurare setup. Ei vor fi mereu un cunoscut punctul de
plecare pentru crearea de suplimentare
profiluri, precum si un punct de recuperare, daca va propriul profil (e) devine
corupt.
. profilul dvs. (e) nu vor fi
suprascrise si si-a pierdut daca instalati o versiune actualizata a Mach3. In
timpul o actualizare, implicit profiluri (Mach3Mill.XML, etc) vor fi suprascrise
cu o noua versiune. Daca versiunea veche
de Mach3Mill.XML cuprinse toate laborios-a intrat informatii de
configurare, nu va fi fericit!
De Mach3 Loader shortcut nu are nici un profil presetat de ales. Se ruleaza
Mach3 cu un meniu de pornire a va ruga de
a-si alege profil care sa le folositi. Se prevede, de asemenea, o cale de a
crea propria personalizat profiluri.
2.3.1 Crearea unui profil
Run Mach3Loader folosind preconfigurarea de comenzi rapide. Fereastra este prezentat in
Figura 2.5 si va aparea astfel.
Figura 2.5: Fereastra de selectare Profil
Faceti clic
pe butonul Creare profil. Fereastra este prezentat in Figura 2.6 va aparea.
Figura 2.6:
Creati Profil Window
In partea
stanga lista, faceti clic pe profilul pe care doriti sa o clona (in acest exemplu,
este Mach3Mill). Tip de nume pe care
doriti sa o alocati de profil nou in noul profil caseta Nume. Nu verifica
Implicit Profil de Valori cutie.
(Selectarea profilul implicit Valori produce un minim de profil.)
Faceti clic pe butonul OK.
Puteti rula Mach3 cu noul profil, ruland Mach3Loader, selectand numele dvs. de
profil in lista si faceti clic pe
butonul OK. Pentru comoditate, poate doriti sa creati o comanda rapida pentru a
Mach3 cu profilul dvs. nume in linie de
comanda, asa cum se arata in figura 2.7.
Figura 2.7: Scurtatura pentru 'MyMill'
2.4Installation Probleme
Doua lucruri pot sa apara atunci cand ruleaza de test care indica o problema:
1. De afisare reads 'Driver nu
a fost gasit sau instalate, persoana de contact de Arta.' Acest ecran va
aparea in cazul in care conducatorul auto nu a instala in Windows. Aceasta se poate intampla XP pe sistemele care
au o coruptie de sofer baza de date.
Remedierea este sa reinstalati Windows. Or, este posibil sa fie difuzate
Win2000. Win2000 are un bug / caracteristica
ce poate interfera cu incarcare de un sofer. Conducatorul auto poate fi necesar
sa fie incarcate manual. Vedea Sectiunea
2.4.2.
2. Daca pe ecran se citeste
'Preluare 3 2 1 ..', dar apoi reboots, unul din doua
lucruri s-au petrecut. Fie nu ati
repornirea sistemului, atunci cand a cerut in timpul instalarii Mach3 (Ti-am
spus! A se vedea Sectiunea 2.1.3), sau
driverul este deteriorat sau care nu pot fi utilizate in sistemul dumneavoastra.
In acest caz, urmati instruire in
Sectiunea 2.4.2 si elimina driverul manual, apoi re-instala Mach3. In cazul in
care aceeasi lucru se intampla, va rugam
sa anuntati ArtSoft SUA folosind e-mail link-ul de pe www.machsupport.com
si vi se va da de orientare.
Cateva sisteme au Placi de baza, care au hardware pentru APIC de timp, dar a
caror cod BIOS-ul nu nu-l folosesc.
Aceasta va confunda cu Mach3 instala. Un fisier batch SpecialDriver.bat este
disponibil in Mach3 folderul de
instalare. Cauta-l cu Windows Explorer si faceti dublu clic pe el pentru al
executa. Aceasta va face Mach3 de sofer
in varsta de utilizare i8529 Interrupt Controller. Veti avea nevoie pentru a
repeta acest proces, ori de cate ori il
descarcati o versiune actualizata a Mach3 instalarea ca noua versiune va
inlocui speciale sofer. Fisierul OriginalDriver.bat
reverses aceasta schimbare.
Windows 'experti' ar putea fi interesat pentru a vedea alte cateva
lucruri. Alb dreptunghiular este o fereastra Tip de sincronizare Analyzer. In cazul in care se executa afiseaza o
linie cu mici variatii indicate. Acesti variatii
sunt modificari in calendarul de la un ciclu la altul intrerup. Nu ar trebui sa
existe linii mai mult de ¼ inci,
sau de pe un 17 'ecran pe majoritatea sistemelor. Chiar si in cazul in
care exista variatii posibile acestea
sunt mai jos de pragul necesar pentru a crea calendarul bataiala asa incat,
atunci cand masina dvs. instrument este conectat ar trebui sa efectueze o miscare de test
pentru a vedea daca jogging si G0/G1 muta sunt netede.
2.4.1 Rularea DriverTest Dupa o Mach3
Crash
Daca, indiferent de motiv, au o situatie cand se ruleaza in cazul in care se
avariaza Mach3 - aceasta ar putea fi o intermitent
problema hardware sau un software de bug-ul - atunci trebuie sa va DriverTest.exe
fugi cat mai repede posibil Mach3 dupa
ce nu a reusit. Daca intarziere de doua minute, atunci Mach3 driver Windows
pentru a va provoca nu ca de obicei cu
'Blue Screen de moarte.' Running DriverTest reinitializeaza soferului
la o stare stabila chiar daca Mach3
dispare in mod neasteptat.
Puteti gasi, dupa un accident de circulatie, care nu reuseste sa gaseasca
soferul prima data, este difuzat. In acest caz, doar rulati din nou, ca prima faza ar trebui sa repari
lucrurile.
2.4.2 Driver Manual de instalare si
dezinstalare
Ai nevoie de
a citi si de a face aceasta sectiune numai daca nu au trecut cu succes rula
DriverTest program.
De conducator auto (Mach3.sys) pot fi instalate si dezinstalate manual,
folosind Windows Control Panel.
Casetele de dialog difere usor intre Windows 2000 si Windows XP, dar pasii sunt
identice.
1. Deschideti Panoul de control Windows si faceti dublu-clic pe icoana sau
linie pentru System.
2. Selectati hardware si faceti clic pe Adaugare hardware expertul. Windows va
cauta pentru orice nou efective de hardware (si gasi nici unul).
3. Spune expertul pe care le-ati instalat deja-l si apoi procedati la urmatorul
ecran.
4. Va fi afisata o lista de componente hardware. Defilati in partea de jos a
acestei si selectati Adaugati un nou hardware aparat si pentru a trece la ecranul urmator.
5. Pe ecranul urmator nu doriti sa Windows cautare pentru sofer asa selectati
Instalare hardware pe care am selecta
manual dintr-o lista (Complex)
6. Lista va sunt prezentate va include o intrare pentru Mach1 / 2 pulsing
motor. Selectati aceasta optiune si mergeti la next screen.
7. Faceti clic pe Obtinere disc, pe ecranul urmator punct de fisier selector
pentru a va Mach3 dosar (C: Mach3 de implicit). Windows ar trebui sa gasiti
fisierul Mach3.inf. Selectati fisierul si faceti clic pe Open. Windows instaleaza
driverul.
Conducatorul auto poate fi dezinstalat mai
simplu.
1. Deschideti panoul de control si faceti dublu-clic pe icoana sau linie pentru
System.
2. Selectati hardware si faceti clic pe Device Manager
3. Va fi afisata o lista de dispozitive si driver-ele lor. Mach1 Pulsing Motor
a conducatorului auto Mach3 Sofer in
cadrul acestuia. Faceti clic pe simbolul + pentru a extinde copac, daca este necesar.
Clic-dreapta pe Mach3 Driver. Aceasta va
afisa o scurta meniu care include optiunea de a-l dezinstalati. Faceti clic pe Dezinstalare.
Acesta va elimina fisierul Mach3.sys de
la folderul Windows. Copia in Mach3 dosar vor continua fi acolo. Nu exista un punct la nota finala. Windows aduce aminte de toate
informatiile despre modul in care ati configurat Mach3 intr-un fisier de Profil. Aceasta
informatie nu este eliminat de catre ONU, instalarea driverului si
stergerea Mach3 alte fisiere, asa ca va
ramane ori de cate ori se face upgrade de sistem. Cu toate acestea, in foarte
putin probabil cazul in care aveti
nevoie de un total instalare curata de la zero, atunci este posibil sa aveti
nevoie pentru a sterge. XML profil fisier
sau a unor fisiere.
Capitolul 3 Introducerea Mach3 Ecrane si
Comenzi
Acum sunteti gata sa incercati un 'uscata rula' de Mach3. Aceasta va
fi mai usor de inteles cum sa va setati real masina unealta, dupa ce au experimentat un pic cu software-ul. Puteti
'preface' a masinii si invata
multe, chiar daca nu aveti o masina unealta CNC inca. Daca aveti unul, apoi asigurati-va
ca acesta nu este inca conectate
3.1Screens
Daca v-ati creat propriul profil personalizat dupa cum se arata in figura 2.2
si figura 2.3, Mach3 va fi creat o
comanda rapida icoana de pe desktop cu numele dvs. personalizat de profil.
Faceti dublu-clic pe caz pictograma de
lansare a programului, folosind ca profil. De asemenea, puteti sa faceti
dublu-clic pe icoana Mach3 Loader pentru a rula programului, selectati dintr-o lista de nume de profil pentru a utiliza,
apoi faceti clic pe butonul OK. (Te-ai crea propriul profil, dupa cum este descris in sectiunea 2.3, nu-i asa? Daca
nu, mergeti inapoi si sa cititi sectiunea respectiva.)
Daca ati instalat mai mult de un conducator auto sau a treia parte de control
plugin miscare, este posibil sa vedeti un ecran similare, pentru a figura 3.1. (De continut a ecranului puteti vedea va
depinde de ceea ce le-ati instalat.)
Selectati ce doriti sa-l utilizati, facand clic pe butonul corespunzator, apoi
faceti clic pe butonul OK.
Figura 3.1: Selectati dispozitiv de control Screen
Ar trebui sa
vezi Mill Programul Run ecran. De alte mari ecrane, identificate pe filele sunt
MDI (manuala a datelor de intrare),
Instrumentul de Cale, compenseaza, Setari, si de diagnostic, dupa cum se arata
in figura 3.2. Asigurati-va ca
Rulati programul de ecran este selectat, numele acestuia va fi afisat in
albastru.
Figura 3.2: Ecranul de selectie 
Notice rosu Resetare buton. Acesta va avea un
fulger rosu / LED verde (simulare de o lumina care emit diode) de mai sus este si niste LED-uri
galben aprins. Daca faceti clic pe butonul, apoi galben, LED-uri va merge si aprinde LED-ul verde se transforma in
solid. Mach3 este gata de actiune!
Daca nu se poate reseta, atunci problema este, probabil, ceva conectat la portul
dvs. paralel sau porturi (a 'Dongle',
probabil), sau de pe PC a avut anterior Mach3 instalat pe acesta cu un
neobisnuit de alocare a port insigne de
urgenta Stop (impiedica de semnal). Printr-un click pe butonul pe care il
Offline ar trebui sa poata reinitializa
sistemul. Cea mai mare parte a testelor si demonstratii in acest capitol nu va
functiona decat daca Mach3 este de
reinitializare a impiedica de modul.
3.1.1 Tipurile de obiecte pe Ecrane
Veti vedea ca programul Executare ecran este alcatuit din urmatoarele tipuri de
obiecte:
. Butoane (de exemplu, Resetare, Stop Alt-S, etc)
. DROs, sau Digital Masina. Ceva cu un numar afisat va fi un DRO. Aceasta poate
fi o mai generale de utilizare a
termenului 'DRO' decat v-ati obisnuit. Principalele DROs sunt,
desigur,
de pozitiile curente ale X, Y, Z, A, B, C si axe, dar exista, de asemenea, rata
DROs pentru hrana pentru animale, ax de
viteza, precum si alte valori.
Simulate . LED-uri (in diferite marimi si forme)
. GCode afisa fereastra (cu propriile sale defilati bare)
. Toolpath de afisare (necompletat patrati de pe ecran in momentul de fata)
Exista in continuare un important tip de control care nu se afla in programul
de Executare ecran:
. MDI (Manual de date de intrare) linie de pe ecran MDI
Butoane, cutii de introducere de date, precum si linia de MDI sunt Consumul
Mach3.
DROs poate fi afiseaza de Mach3 sau pot fi utilizate ca intrari de tine.
Modificari de culoare de fundal, atunci cand pe care o introduce.
De GCode fereastra si afiseaza Toolpath furnizarea de informatii de
3.1.2 Utilizarea butoanelor si
Scurtaturi
Cele mai multe standard butoanele de ecran au o tastatura hotkey, care poate fi
o singura cheie sau o cheie de asociere.
Acest lucru este demonstrat de multe ori, ca parte a numelui pe butonul de
sine, intr-o eticheta sau in apropierea acesteia. De exemplu, comenzi rapide pentru a merge
Intr-un atelier de lucru, este adesea mai convenabil sa se reduca la minim ori,
atunci cand aveti nevoie pentru a utiliza un mouse. Fizica switch-uri de pe un panou de control pot fi
utilizate pentru a controla Mach3 prin utilizarea de o tastatura emulator bord
(pentru exemplu, Ultimarc IPAC). Acest
lucru se conecteaza in serie cu tastatura si va trimite Mach3
'pretinde' Prese-cheie pentru
a activa butoane folosind comenzi rapide de la tastatura.
In cazul in care un buton nu apare pe ecran curent, apoi sa tastatura comenzi rapide
nu este activ.
Exista anumite speciale comenzi rapide de la tastatura, care sunt la nivel
global in toate ecranele. Capitolul 5 arata cat de acestea sunt stabilite.
3.1.3 de introducere de date pentru a
DROs
Aveti posibilitatea de a introduce noile date in orice DRO in ea printr-un clic
cu mouse-ul, printr-un clic sale tasta rapida (apasati tasta in cazul in
care set), sau prin utilizarea global
hotkey pentru a selecta DROs si se muta la cel pe care doriti cu sageata taste).
Incercati sa intre intr-o feedrate ca 45.6 pe Programul Run ecran. Faceti clic
in caseta de feedrate si tipul de numere.
Trebuie sa apasati tasta Enter pentru a accepta noua valoare, sau apasati tasta
Esc pentru a reveni la precedente.
Backspace Stergere si atunci cand nu sunt active la introducerea DROs.
Atentie: Aceasta nu este intotdeauna cu bun-simt de a pune propriile date
intr-un DRO. De exemplu, pe ecran de dvs. ax viteza reala este calculata de catre Mach3. Orice valoare pe care le
introduceti vor fi suprascrise. Puteti adauga valori in axa DROs, dar nu trebuie sa o fac pana
cand nu ati citit Utilizarea Mach3Mill in manual detaliu. Aceasta nu este o modalitate de a
muta instrument!
3.2Jogging
Va puteti muta instrument relativ la orice loc de pe munca manual, prin
utilizarea diferitelor tipuri de jogging.
Desigur, la unele masini, instrumentul in sine se va muta si pe altii, va fi masina
de masa sau slide-uri care muta. Vom
folosi cuvintele 'muta instrument' aici pentru simplitate. Fie ca instrumentul
se deplaseaza sau nu, cadrul de
referinta folosite isi va asuma instrument circulatie. Asta este, 'un
instrument pentru a va deplasa de la stanga' poate
de fapt, sa fie realizate de catre miscarea de masa la dreapta.
De jogging controale sunt pe o speciale 'zbura-out' ecran. Acest
lucru este demonstrat si de ascuns prin utilizarea Tab-cheie de pe tastatura. Figura 3.3 ofera o vedere de
flyout.
Figura 3.3: Control Butoane Flyout
De asemenea,
puteti utiliza tastatura pentru jogging. De arrow chei sunt stabilite in mod implicit
pentru a va oferi jogging pe pe axele X
si Y si Pg Sus / PgDn jogs pe axa Z.
Aveti posibilitatea sa re-a configura aceste taste pentru a se potrivi cu
propriul dvs. preferinte. Aveti
posibilitatea sa utilizati cheile jogging cu privire la orice ecran cu Jog ON / OFF buton pe ea.
In Figura 3.3, veti vedea ca Pasul LED este aratat aprins. De Jog butonul Mod Comuta intre Continua, Pasul, si moduri de MPG, In mod continuu, a ales va axa jog pentru
ca timp cat detine cheia jos. Viteza de
jogging este stabilita de catre Slow Jog
Procentajul DRO. Tu posibilitatea de a
introduce orice valoare de la 0,1% la 100% pentru a obtine indiferent de viteza pe care o doriti. In sus
si in jos ecran butoanele de pe langa aceasta
DRO va modifica valoarea acesteia la 5% pasi.
Daca te trage in jos tasta Shift, apoi de jogging va aparea, la 100%, indiferent de viteza
suprascrie setarea.
Acest lucru va permite sa jog rapid la apropierea dvs. destinatie.
In Pasul mod, fiecare de presa al unei jog cheie va muta Axa de distanta indicata in Pasul DRO. Tu
poate parcurge o lista predefinita de Pasul dimensiuni cu ciclul Jog Pasul buton. Circulatia va
fi la curent Feedrate.
Rotary codificatoare poate fi interfaced (prin paralela port de intrare-pin) pentru a Mach3 ca
Manualul Puls generatoare (MPGs). Acesta
este utilizat pentru a efectua jogging prin rasucire nod sale, atunci cand, in mod MPG.
Butoanele Alt A marcat, Alt B, C si Alt
ciclu prin axe disponibile pentru fiecare
din cele trei MPGs, si LED-uri care
definesc axa in prezent este selectat pentru jogging.
De o alta
optiune pentru jogging este un joystick conectat la jocurile pe PC sau portul USB. Mach3
va orice lucru cu Windows-compatibil
'analog joystick-ul' (asa ca
ar putea chiar sa va controlati de catre o axa X Ferrari volanul!). Corespunzatoare
Windows driverul va fi nevoie de
joystick-ul aparatului. De 'Stick
este activat prin butonul joystick-ul, si, pentru siguranta, trebuie sa fie in
pozitie centrala atunci cand este activat.
Daca aveti un real joystick-ul si are o acceleratie de control, atunci acest
lucru poate fi configurat, fie pentru a controla jog suprascriu de viteza sau
de control a trece peste rata de alimentare (a se vedea capitolul 5 din nou). O
astfel de joystick-ul este un ieftina
metoda de a furniza foarte flexibil, control manual al masina dvs. instrument.
In plus, puteti utiliza multiple
joysticks (strict pe axelor Human Interface Devices) prin instalarea
producatorului profiler software-ul sau, chiar mai bine, de utilitate
KeyGrabber livrat cu Mach.3-5
Acum ar fi un moment bun pentru a incerca toate jogging optiuni pe sistemul
dumneavoastra. Nu uitati ca exista comenzi rapide de la tastatura pentru
butoane, asa ca de ce nu-i identifice si sa incercati-le.Artrebui sa gasim o
cale de curand de lucru care se simte confortabil.
3.3Manual de date de intrare (MDI) si
didactica
Folositi mouse-ul sau tastatura de comenzi rapide pentru a afisa MDI (Manual de
date de intrare) ecran.
Acest lucru are o singura linie de introducere de date. Aveti posibilitatea sa
faceti clic pe ea pentru a selecta din aceasta sau apasati Enter, ceea ce va
automat selectati-l. Puteti orice tip
valabil linie care ar putea aparea intr-o parte si de program, va fi
executat cand apasati Enter. Puteti sa
aruncati linie, apasand Esc. De Backspace cheie poate fi utilizat pentru corectarea greselilor in dumneavoastra
tastand.
Daca stiti ca unele comenzi GCode, puteti incerca sa-i afara. Sau puteti
incerca:
G00 X1.6 Y2.3
Figura 3.4:
Exemplu de MDI
Aceasta
comanda va muta instrument de coordonate X = 1.6 unitati si Y = 2-3 unitati.
(Este G zero nu G scrisoare
O.), veti vedea o axa DROs muta la noi coordonate.
Incercati mai multe comenzi (sau G00 la locuri diferite). Daca apasati de sus
sau in jos arrow chei , in timp ce in
MDI linie, veti vedea ca Mach3 defilati cu tine inapoi si inainte prin istoria de comenzi pe care le-ati folosit. Asta il
face usor de a repeta o comanda, fara sa se re-tip-o.
Cand selectati de MDI linie veti vedea o caseta flyout oferindu-va o
previzualizare a amintit acest text.
O linie de MDI (sau de bloc, ca o linie de GCode este uneori numit) poate avea
mai multe comenzi pe el.
Acestea vor fi executate in 'sensibile' pentru astfel cum sunt
definite in Utilizarea Mach3Mill manual - nu neaparat
de la stanga la dreapta. De exemplu, stabilirea unui flux de viteza folosind o
comanda ca F2.5 va avea efect inainte de
orice feed viteza miscari, chiar daca F2.5 apare la mijlocul sau chiar la sfarsitul
celei de-a linie (bloc). Daca aveti
indoieli cu privire la ordinea in care vor fi utilizate, introduceti fiecare
MDI comanda pe un rand separat.
3.3.1 Predarea
Mach3 pot amintesc o succesiune de linii pe care le introduce folosind MDI si
scrieti-le intr-un fisier. Acest fisier
poate fi apoi executati din nou si din nou ca o GCode program.
Pe de MDI ecran, faceti clic pe butonul Start Invatati. LED-ul de langa ea va lumina
sa va reamintesc ca ati sunt de predare.
Tip intr-o serie de linii de MDI. Mach3 va executa fiecare comanda ca dupa ce
apasati ENTER fiecare linie. Mach3 va
stoca secventa de comenzi pe care le introduceti intr-un fisier numit Invatati.
Figura 3.5: Predare-un dreptunghi
Puteti scrie
propriul cod, sau sa incercati:
g21
tip F100
g1 x10 y0
g1 x10 y5
x0
y0
Toate 0 sunt zero, nu de capital Os. Cand ati terminat, faceti clic pe Stop
Invatati. Apoi, faceti clic pe Load / Editare
si du-te
Figura 3.6: Programul de desfasurare a invatat
Daca
utilizati editorul, va fi capabil de a corecta orice greseli si de a salva
acest program intr-un fisier de dvs. alegerea
proprie. Acesta este un gol stanga paginii pentru doua tipuri de efecte de
imprimare.
Capitolul 4 Cerinte hardware si Conectarea la masina unealta
Acest capitol va spune despre hardware-ul aspecte legate de o masina unealta de
conectare
ofera detalii despre configurarea Mach3 pentru a utiliza hardware-ul conectat.
Daca ati cumparat o masina, care este deja echipate pentru a fi conduse de
Mach3, atunci va trebui, probabil, nu
Pentru a citi acest capitol, cu exceptia de interes general. Furnizorul dvs. ar
trebui sa aiba dat unele documentatia
care explica cum sa va conectati la parti ale sistemului dvs. impreuna.
Cititi acest capitol pentru a afla ce Mach3 se asteapta ca aceasta se intampla
pentru a controla si de modul in care puteti conecta standard componente ca stepper motor driver-si
micro-switch-uri pentru a construi un sistem de CNC. Descrierile Presupun ca va puteti intelege simplu
schematica circuit diagrame. Daca nu, atunci acum este momentul sa a lua niste ajutor.
La prima lectura, este posibil sa nu vrei sa te privesc cu urmatoarele sectiuni
Sectiunea 4.5, Limita Acasa si
Switch-uri, si sa pastreze in vedere informatiile de la punctul 1.4, Mach3 Ce
Poate Face, asa cum ati va propriul plan
de configurare.
4.1 PC Portul Paralel si istoria sa
Mach3 interfete cu motor drivere, limita de switch-uri, precum si alte
hardware-ul prin intermediul PC-ului paralel
port (s). Aceasta sectiune descrie caracteristicile de port paralel
Cand IBM proiectat initial PC (160K floppy unitate de disc, 64kbytes de RAM!),
Au oferit o interfata de conectare a
imprimantelor folosind un cablu de 25 dirijor. Aceasta este baza de port
paralel avem pe cele mai multe PC-uri de
azi. Avand in vedere ca este un foarte simplu mod de a transfera date, acesta a
fost folosit pentru mai multe alte
lucruri decat de conectare a imprimantelor. Puteti transfera fisiere intre
PC-uri, atasati copie de protectie 'dongles,'
conecta periferice, cum ar fi scanere si Zip drive, si, bineinteles, de control,
utilizand masini unelte el / ea.
Interfata USB este preluand multe dintre aceste functii, iar acest lucru
convenabil pleaca de la paralele port
gratuit pentru Mach3.
De port paralel conector de pe PC-ul este o femeie de 25 de ac de par
'D' conector. De conector, asa cum se vede de la partea din spate a PC-ului, este prezentata
in figura 4.1. Sagetile da directia fluxului de informatii relativ
PC-ul. Astfel
PC-ul.
Figura 4.1: Portul Paralel Femeie Conector (vazut din spate a PC)
Nota: Convertoare plug care intr-un
port USB si un conector 25 PIN-ul nu va conduce o masina instrument cu ajutorul Mach3, chiar daca ele
sunt perfect potrivite pentru a simplifica sarcina de a conecta o imprimanta.
4.2 Logica Semnale
La prima lectura, ati putea dori sa trece la urmatoarea rubrica si
intoarceti-va aici, daca aveti de a se implica cu pietricele nitty-circuite de interfata. Acesta va fi probabil util
sa-l cititi cu documentatia pentru va
axa unitate electronica.
Toate semnalele de iesire si de intrare Mach3 la acesta sunt binar digital
(adica zero si unu). Aceste semnale
sunt furnizate de tensiuni de iesire insigne sau furnizate de intrare PINS de
port paralel. Aceste tensiuni sunt
evaluate in raport cu al computerului 0 volt linie, care este conectat la pin
18 la 25 de port conector.
Primul succes de familie (74xx serie) de circuite integrate utilizate TTL (tranzistor-tranzistor
logica). In TTL circuite, orice tensiune
intre 0 si 0.8 volti se numeste 'lo', precum si orice tensiune intre
2.4 si 5 volti se numeste
'Buna.' Conectarea unui negativ de tensiune sau ceva de peste 5 volti
la un TTL de intrare va produce
fum. De port paralel initial a fost construit folosind TTL si pana in ziua de
azi aceste tensiuni si defini
'Lo' si 'buna' semnale. Observati ca in cel mai rau caz
exista doar 1.6 volti diferenta intre ele.
Este, desigur, arbitrara daca am spune ca a 'lo' reprezinta o logica
unul sau o logica zero. Dupa cum se
explicat de mai jos, cu toate acestea, anuntandu 'lo' = una este, de
obicei, mai mult de dorit, in cele mai multe circuite de interfata practice.
Pentru un semnal de iesire pentru a face ceva, unele actual, va trebui sa
debitului in circuit conectat la el. Cand
este 'buna', actual va curge de pe computer. In cazul in care este
'lo', actual va curge in computer.
Cele mai multe curente pe care le-ati curge in, mai greu este pentru a mentine
tensiunea aproape zero, deci mai aproape de a
limita permisa de 0,8 volti 'lo' va deveni. In mod similar, curent
care curge dintr-o 'Max' va face ca
tensiune fi mai mici si mai aproape de limita inferioara 2.4 volti. Deci, cu
prea mult curent diferenta
intre 'lo' si 'buna' va fi chiar mai putin de 1.6 volti si
lucrurile vor deveni nesigure. In cele din urma, este
demn de remarcat va sunt permise aproximativ 20 de ori mai mult curent care
curge intr-o 'lo' decat sunt permise
curge dintr-o 'buna'.
Rezultatul net este ca este mai bine pentru a atribui logica 1 pentru a fi un
'lo' semnal. Destul de evident, aceasta se numeste activa lo logica. Principalul dezavantaj al practice
este ca dispozitivul conectat la portul paralel trebuie sa
au un volt aprovizionare 5 la acesta. Aceasta este, uneori, luate de
Revenind la semnalele de intrare,
computerul va avea nevoie de a fi furnizat cu unele curente (mai putin de 40
microamps) pentru 'Max' intrarile si va furniza unele (mai putin de
0.4 miliamperi) pentru 'lo' intrarilor.
Placi de baza calculator modern, deoarece combina mai multe functii, inclusiv
port paralel, intr-o singura
cip am observat in cazul in care sistemele de tensiuni doar asculta de
'buna' si 'lo' reguli. S-ar putea gasi
ca o masina unealta care a fugit pe un vechi sistem devine temperamental cand faceti
upgrade de la computer.
PINS 2 la 9 sunt susceptibile de a avea proprietati similare (in care sunt date
de pin, atunci cand imprimarea). Pin 1 este, de asemenea, vitale in imprimare, dar de alta iesire PINS sunt
putin utilizate si pot fi mai putin puternic intr-o cu atentie
'optimizate' design. O buna
izolare breakout bord (a se vedea Sectiunea 4.2.1, izolarea Breakout Boards) va
proteja te din aceste electrice probleme
de compatibilitate.
4.2.1 izolarea Breakout camerelor
Chiar daca omit sectiunea precedenta ati avut mai bine citit-o pe asta!
Vei vedea ca PINS 18 - 25 de port paralel sa fie conectate la 0 volt parte a
computerului alimentare cu energie.
Toate semnalele din interiorul si din afara PC-ului sunt relativ la acest
lucru. Daca va conectati multe fire lungi la acesta, in special in cazul in care rula in apropierea fire de inalta
transporta curenti de motoare, apoi aceste fire vor avea indusa de curenti curge in care le pot crea
tensiune 'zgomot' si poate provoca erori. De interferenta
ar putea chiar de avarie la computer.
Axa ax si poate conduce, pe care
le va conecta
susceptibile de a lucra intre 30 si 240 de volti, iar ei vor fi capabili sa
furnizeze curenti de multe Amperi.
Conectat corespunzator vor face nici un rau la computer, dar un scurt-circuit
accidental ar putea cu usurinta
distruge intregul calculator placa de baza si chiar de pe CD-uri si hard
disk-uri, de asemenea.
Pentru aceste doua motive ArtSoft SUA recomanda insistent sa utilizati o
interfata bord numit-o 'izolarea
breakout bord '. Aceasta va furniza terminale care sunt usor pentru a se
conecta la un separate 0 volt (comuna), pentru de unitati de stocare, switch-uri de origine, etc, si se va evita
maximum permis de curent si in afara de port.
Acest breakout bord, unitatea
electronica, si sursa de alimentare trebuie sa fie instalat ingrijit intr-un
metal
caz, pentru a minimiza riscul de interferenta cu vecinii 'semnalele de
radio si televiziune. Daca va construi un 'Sobolan cuib', apoi te invitam scurt circuite si tragedie.
Figura 4.2 arata trei reprezentant comercial
breakout panouri.
Figura 4.2: Exemple de trei disponibile comercial Breakout camerelor
4.3 impiedica de control
Fiecare masina de instrument ar trebui sa aiba unul sau mai multe de urgenta
Stop (opri) butoane, de obicei, cu un mare si rosu, ciuperci cap. Ele ar trebui sa fie echipate
astfel incat sa puteti ajunge cu usurinta de la un oriunde s-ar putea sa
fie atunci cand sunt de operare a
masinii. Acest lucru este deosebit de important pe o masina CNC.
Fiecare buton ar impiedica de a opri toate activitate in masina cat de repede
este posibil, in conditii de siguranta. De ax ar trebui sa oprim si axe de rotatie trebuie sa opreasca in miscare.
Acest lucru ar trebui sa se intample, fara a se bazeaza pe software-ul.
- Deci, este vorba de relee si contactoare. Circuitul Mach3 ar trebui sa-i
spuneti ceea ce ati facut, si de
exista o speciale, obligatorii pentru aceasta intrare. Este in general, nu va
fi suficient de bun pentru a opri doar AC
impiedica de putere pentru un eveniment, pentru ca a energiei stocate in DC
uniformizare condensatori motoare pot permite sa rula pe perioada considerabila de timp pentru
unii. (Nu neaparat pentru a camerelor
aceeasi scara)
Masina nu ar trebui sa poata fugi din nou, pana la un 'reset' a fost
apasat butonul. In cazul in care impiedica de buton
se blocheaza atunci cand impins, apoi masina nu ar trebui sa inceapa, atunci
cand aceasta versiune de cotitura sau cap. Acesta nu va fi, in general, posibilitatea de a continua o parte de
prelucrare dupa o impiedica de eveniment, dar te si Masina va fi cel putin in siguranta.
Axa 4.4 Drive Optiuni
4.4.1 Steppers si Servos
Exista doua tipuri posibile de forta motrice pentru Axa drive:
. Stepper motor
. Servo motor (fie AC sau DC)
Oricare dintre aceste tipuri de autovehicule pot conduce la axe prin leadscrews
(plain-sau-minge de nuci), curele, lanturi, sau rack si pinion. Mecanice metoda unitate va determina viteza si
cuplul necesare de la de motoare si,
prin urmare, nici o transmisie necesare intre motor si masina.
Proprietati a unui bipolara stepper motor drive includ:
. costuri reduse.
. 4-simpla sarma legatura cu motor.
. Min intretinere.
. Motor de viteza limitata la aproximativ 1000 rpm si cuplul limitat la
aproximativ
Notiuni de baza viteza maxima depinde de rularea cu motor sau unitatea
electronica la maxim permis de tensiune.
Notiuni de baza maxim de cuplu depinde de rularea autovehiculelor la maxim permis curent (amperi).
. Din motive practice pe o masina unealta, steppers necesitatea de a fi condus
de un micro-tocat intensificarea
controler pentru a asigura buna functionare la orice viteza cu randament
rezonabil.
. Ofera deschide bucla de control, ceea ce inseamna ca este posibil sa se
piarda in conformitate cu pasi mari de incarcare, iar acest lucru nu pot fi imediat evidente la masina
utilizator. In practica, stepper motor drive da satisfacatoare performanta cu masini unelte conventionale
pana la un turnulet Bridgeport mill sau un 12 'leagan
(6 'centru de inaltime) strung cu exceptia cazului in care doriti
exceptionale, de precizie si viteza de operare.
Pe de alta parte, un servo motor unitate:
. Este relativ costisitoare (in special in cazul in care acesta are un motor de
curent alternativ).
. Necesita pentru ambele cabluri de motor si de codificare.
. Necesita intretinere perii de pe Motoare.
. Permite motor viteza de 4000 rot / min sau mai mult, si o practic nelimitat
de cuplu (daca bugetul poate stand-o!)
. Ofera bucla inchisa de control astfel de unitate este intotdeauna cunoscuta
pozitia de a fi corect (sau o vina conditie
va fi ridicata in cazul in care o eroare).
Este demn de care doua avertismente aici. In primul rand, sistemele servo pe
masinile vechi sunt, probabil, nu digital.
Asta este, nu sunt controlate de o serie de impulsuri pas si un semnal de
directie, in conformitate cu Mach3.
Pentru a utiliza un vechi motor cu Mach3, va fi nevoie sa se debaraseze de
resolver (care a dat de pozitie) si
instala un quadrature encoder, si va trebui sa inlocuiasca toate electronica.
In al doilea rand, pazeste-te de doua -
parte stepper motoare cu exceptia cazului in care puteti obtine producatorului
de date pentru acestea. Acestea ar putea fi concepute pentru a 5-faza de operare, este posibil sa nu
functioneze bine tocat moderne cu un micro-controler pasit si-ar putea au o mult mai mici decat evaluat de cuplu
aceeasi dimensiune a moderne cu motor. Cu exceptia cazului in care va puteti
testa ei, poate constata ca acestea au
fost accidental demagnetized si asa sa fie inutil. Daca nu esti foarte
increzator de-va aptitudinile si
experienta, sa cumpere utilizate motoare de unitate este susceptibil de a fi
falsa economie si o sursa nesfarsit de
probleme. Orice suma de bani salvate, si mai mult, poate fi petrecut intr-un
desert si frustrant efort de a
plasturele impreuna un sistem de lucru. ArtSoft SUA recomanda ca axa de unitati
sa fie actual produse, cumparate de la
furnizori, care le va sustine. Daca achizitionati de drept atunci va trebuie
doar sa cumpara o data, si veti fi in
sus si sa fie difuzate mai devreme.
Figura 4.3: Exemplu de Servo Motor cu Encoder
4.4.2 Determinarea Axa Drive Cerinte
Un set complet de calcule pentru axa cerinte conduce ar fi foarte complicat, si
tu, probabil,
nu au toate datele necesare (de exemplu, ceea ce este de maxim taiere vigoare
pe care doriti sa o folositi).
Unele calcul este, cu toate acestea, este necesar pentru succes. Ca un minim,
care aveti nevoie pentru a stabili cat de multe motor masuri va lua pentru a muta o axa de o anumita distanta. Raspunsul
depinde de masina de hardware
configurare (de exemplu, teren de leadscrew), precum si cu motor caracteristici
(cate pasi il face pe revolutie).
4.4.2.1 Exemplu 1 - Mill tabelul de
Cruce Slide
Incepeti prin a defini minim posibil muta distanta dorit. Aceasta este o limita
absoluta de precizie
de activitatea desfasurata de pe masina. Apoi verifica rapid de viteze si de
cuplu.
De exemplu, sa presupunem ca ati sunt proiectarea o moara cross-slide (axa Y)
de unitate, si cruce slide are un total de calatorie de 12 '. Vi se intampla sa folositi un surub cu un 0.1
'pitch singur fir de start si o minge de nuci. Vrei
masina sa fie capabila sa faca un minim de 0.0001 muta '. Un completa a
transforma 0.1' pitch va surub
muta 0.1 ', asa ca o miscare de 0.0001' este de 1 / 1000 de asta.
Acest lucru va necesita 1 / 1000 de o revolutie a
motor ax in cazul in care acesta este cuplat direct la surub.
Folosind un Stepper motor
Minima pas cu un stepper motor depinde de modul in care aceasta este
controlata. Multe frecvent disponibil
stepper motoare au 200 complet pasi pe revolutie, dar de asemenea, controlorii
de permis de 'micro-departe.' Microstepping ajuta la buna functionare da peste intreaga
gama de viteze de hrana pentru animale, si multe controlere va permite sa aveti 10 de micro-pasi pe deplin pas. A
200-pas cu motor cu 10 de micro-pasi pe deplin pas ar permite 1 / 2000, de o revolutie ca minim
pas. In exemplul nostru de mai sus, doi pasi de micro-ar da dorit 0.0001 'minim muta. Acest lucru
trebuie sa fie privite cu o prudenta, cu toate acestea. Avand in vedere ca
numarul Encoder de pe microsteps pas, creste, cuplul se
incadreaza in afara rapid. In functie de sarcina fiind impuse de motor, este posibil sa nu existe de fapt
destul de cuplu pentru a muta un singur motor de microstep. Ea poate fi necesare pentru a face mai multe microsteps
inainte exista suficiente de cuplu. Pe scurt, ar trebui sa nu conta pe microstepping pentru a realiza bine
precizie. Principalul beneficiile sunt reduse microstepping mecanice de zgomot, gentler actionare, si de
reducere a rezonante probleme.
Apoi, uita-te la rapid posibil
pentru hrana animalelor de viteza. Sa presupunem, conservator, ca motor viteza
maxima este 500 rot / min. In exemplul
nostru 0.1 'pitch leadscrew, 500 rot / min-ar da o rapida de alimentare de
50 de inch / minut, sau chiar sub 15
secunde pentru a completa 12 'diapozitiv de calatorie. Acest lucru ar fi
satisfacatoare, desi nu au fost spectaculoase.
La acea viteza, a pasit cu motor de micro-unitate de electronice ar avea nevoie
de 16667 impulsuri pe secunda.
(500 rot / min * 200 pasi pe rev * 10 microsteps pe pas / 60 secunde pe
minut) 1 GHz pe un PC, Mach3 pot genera
35000 impulsuri pe secunda, simultan, pe fiecare din cele sase posibil axe. Deci, nu exista probleme aici.
Aveti acum pentru a determina cuplul ca masina va fi nevoie, ceea ce va
determina marimea motor necesare.
O modalitate de a masura acest lucru este
pentru a seta masina de taiat de grele in care credeti ca
va face vreodata si, cu un timp de parghii (sa zicem 12 ') de pe slide
handwheel, sa-l de la sfarsitul primaverii, cu o
echilibru (sau set de primavara bucatarie scales). De cuplu pentru taiat (in
uncii-inch) este echilibrul lectura
(in uncii) x 12. O, probabil, mai usor si mai sigura cale, in cazul in care
informatii pot fi gasite, este de a utiliza o
motor marimea si specificatia ca stii de lucrari pe o masina asemanatoare cu
acelasi tip de alunecare si
insuruba. Deoarece un stepper motor, daca este supraincarcata, poate au
'pierdut pasi' si rezulta inexactitate, asigurati-va ca utilizarea unui motor de dimensiuni adecvate,
cu o multime de cuplul de aplicare.
Puteti, de asemenea, cresterea disponibile cuplu de angrenare. Daca dvs. de
viteza rapida de alimentare rezultate in calcul un nivel rezonabil valoare, ce ar putea lua in considerare
incetinirea este de 2:1 angrenare (dintat, probabil, de o transmisie prin
curele), care ar fi aproape dublu de
cuplu disponibil pe surub. Care ar putea permite utilizarea mai mici (mai ieftin) de motoare, in detrimentul unor
performanta.
Folosind un Servo Motor
Din nou, ne uitam la marimea un pas. A servo motor are un encoder sa-i spun
sa unitate electronica in cazul in care
el / ea este. Aceasta consta intr-o slotted disc, care va genera patru
'quadrature' impulsuri pentru fiecare slot in
disc. Astfel, un disc cu 300 sloturi orare, de exemplu, genereaza 300 de
cicluri pe revolutie (CPR). Acest lucru este destul de scazute pentru comerciale codificatoare. De
codificare electronica ar iesire 1200 quadrature conteaza pe revolutie (QCPR) din arbore motor. Cu 0.1 'pitch
leadscrew, un pas ar fi dat un minim
circulatie a 0.000083 ', care este mai buna decat 0.0001' dorit.
Unitatea electronica de servo de obicei, se va transforma un motor de quadrature
conta pe intrare pas puls. Unele inalta
specificatie servo electronica pot multiplica si / sau diviza impulsurile pas
de o constanta (de exemplu, cu un pas
pulsul se muta cu 5 quadrature impulsuri sau 36/17 impulsuri).
Acest lucru este
adesea numit electronice angrenaj.
Ca si viteza maxima de un servo
motor este in jur de 4000 rot / min, noi sigur va avea nevoie de o viteza de
reducere a de pe disc mecanice. 5:1 pare
sensibil. Acest lucru va scadea de asemenea, circulatia pe etapa, si
in exemplul nostru ar da o miscare de 0.000083 '/ 5, sau 0.0000167'
pentru fiecare pas, care este mult mai bine
decat cea ceruta (0.0001 ')
Ce viteza maxima rapid vom ajunge? 35000 pas cu impulsuri pe secunda ajungem
5.83 revolutii
[35000 / (1200 * 5)] din leadscrew pe secunda. Aceasta este OK, la circa 9
secunde pentru 5 'calatorie de
diapozitiv. Observati, totusi, ca viteza este limitat de rata de
Acest lucru este de numai aproximativ 1750 rot / min in exemplul. Obiectivele
de limitare ar fi chiar mai rau, daca a dat encoder mai multe impulsuri pe revolutie. Acesta va
fi deseori necesar sa se foloseasca servo electronica electronice cu transmisie
a a trece peste aceasta limitare, daca aveti
mare conta codificatoare.
In cele din urma, verifica pe disponibile cuplului. Un motor servo necesita mai
mult de o marja de siguranta stepper motor servo, deoarece nu poate suferi de 'pierdut pasi.' In cazul in
care cuplul cerute de masina este prea mare,
Cu toate acestea, cu motor mai supraincalzirea sau unitatea electronica ridica
o supra-curent vina.
4.4.2.2 Exemplul 2 - Router brat
articulat Drive
Un brat articulat router-ar putea avea nevoie de o calatorie de cel putin 60
'pe brat articulat axa. Un ballscrew pentru ca ar lungime fi costisitoare si dificil de protejat de
praf. Multi designeri ar opta pentru un lant si sprocket
conduce.
S-ar putea alege un minim de 0.0005 pas '. O unitate lant sprocket de 20
de dinti cu 1 / 4 'pitch lant ofera
5 'brat articulat circulatie pe revolutie a sprocket. Un stepper motor
(zece micro-pasi) da 2000 pasi pe o
revolutie atat de reducere 5:1 (centura sau cutie de viteze), este necesara
intre motor si sprocket arbore de a face
cu un pas egal cu 0.0005 'de calatorie [0.0005' = 5 '/ (2000 x 5)],
si, din cauza vitezei 5:1 Revolutia de o
reducere de stepper motor va duce la 1 'de calatorie.
Cu acest design, daca vom primi de
la 500 rot / min stepper, calatorii vor fi
inch pe secunda. Rapida de alimentare de 60 'ar fi, neglijand accelerare
si decelerare timp, sa ia o
rezonabil 7.2 secunde. [60 '/ 8,33 = 7,2]
Cuplul de calcul de pe aceasta masina este mai dificila decat cu crucea slide,
deoarece, cu masa de brat articulat sa
fie mutat, inertie in timpul de accelerare si decelerare este probabil mai
importanta decat forte de taiere.
Experienta de altii, sau de experimente, va fi cel mai bun ghid. Daca va
alaturati ArtSoft in SUA Mach1Mach2CNC
grup de utilizatori de pe Yahoo!, sau intra in general Forum de discutii
pe www.machsupport.com, veti avea acces
la experienta a sute de alti utilizatori.
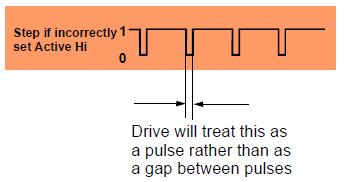
4.4.3 Cum pasul si Dir Semnale de lucru
Mach3 pune la un puls (logica 1), pe Pasul de iesire pentru fiecare pas pe care
axa este de a face. De Dir
iesire va au fost stabilite inainte de pasul puls apare.
Figura 4.4: Pasul Puls Form (active LO)
Logica de unda ca asta va fi prezentat in figura 4.4. Decalajul intre
impulsurile vor fi mai mici
cea mai mare viteza de pasi.
Drive Electronics obicei folosesc de active Lo de configurare pentru Pasul si
semnale de Dir. Mach3 ar trebui sa fie
crea aceste rezultate sunt active Min. Daca acest lucru nu este facut, in Pasul
semnal va mai merge in sus si in jos, dar unitatea va interpreta golurile intre impulsuri ca de impulsuri, si
vice-versa. Aceasta de multe ori cauzele
foarte dur sau nesigure functionare a motorului. The 'inversat'
impulsuri sunt prezentate in figura 4.5.
Pasul pulse01
Figura 4.5: inversat Puls Form (active Max)
4.5 Limita si Acasa Switch-uri
Limita de switch-uri sunt folosite pentru a preveni orice axa liniara de la
mutarea prea departe si provoaca leziuni ale
structura de masina. Puteti rula o masina fara ei, dar cea mai mica greseala in
configurarea sau Programarea poate
provoca o multime de scump daune. Figura 4.6 arata o limita a comuta pe o
morarit masina.
Figura 4.6: Exemplu de Mecanica Limit Switch
Un microswitch montat pe masa este trippedwhen sale hit-uri de parghii de pat de la masina. Acest setupwould nu trebuie sa fie suficient de rigid pentru o buna pozitie de repetabilitate.
O axa pot,
de asemenea, au un Home trece. Mach3 poate fi comandata pentru a muta unul (sau
toate) axe
Prima
Repetabilitatea din punct de operare, in
special cu comutatoare mecanice, este foarte dependenta de
calitatea de a trece de rigiditate si de la montare si actuating parghie. De
configurare este prezentat in Figura
4-6 ar fi foarte imprecis. Repetabilitate este foarte important pentru o
trecere utilizat pentru Home functie.
Fiecare axa ar putea, prin urmare, nevoie de trei switch-uri (de exemplu, doua
comutatoare Limitarea la cele doua capete de calatorie si o Home comutator). Chiar si o baza mill ar
necesita noua port paralel inputuri pentru ei. Acest lucru nu este
practica, ca un port paralel are doar
cinci intrari! Problema insuficiente intrarile pot fi rezolvate in trei moduri:
1. Conectati limita de switch-uri externe de logica (probabil in unitate
electronica), si de a folosi aceasta logica a
opri unitati, atunci cand se ajunge la o limita, mai degraba decat sa le
interfatare Mach3. Separate de referinta
switch-uri vor fi conectate la intrarile Mach3.
2. Utilizati un ac de par de a impartasi toate intrarile pentru o axa, si sa
faca Mach3 ambele responsabile cu controlul
limitele si depistarea Home. De exemplu, daca Mach3 a fost insarcinat sa
'treaca
3. Interfata de switch-uri de o tastatura emulator.
Prima metoda este cea mai buna si obligatorii pentru o foarte mare,
costisitoare, sau rapid masina in care nu este posibila incredere si software-ul sau de configurare
pentru a preveni deteriorarea mecanica. Switch-uri conectate la unitatea de
stocare electronica poate fi inteligent
si permite numai miscare de la o trecere in cazul in care limita este lovit.
Acest lucru este
Dezactivarea mai sigure decat in limitele asa un utilizator poate jog masina
off limitele, dar ea se bazeaza pe care au o sofisticate de unitate.
Cea de-a doua metoda este potrivit pentru masini mai mici, cu acces direct cu
operatorul de control. Cu acest setup, este posibil de a utiliza doar trei intrari
Tastatura are un emulator mult mai lent decat timpul de raspuns de port
paralel, dar ca solutia este satisfacatoare
pentru limita de switch-uri de pe o masina de mare viteza, fara fluxuri. Pentru
detalii, a se vedea arhitectura
Mach3 Personalizare wiki. Nu exista un link pentru a-l la www.machsupport.com.
Exista, de asemenea, un sfert optiune: a se folosi mai putine comutatoare.
Pentru multe aplicatii, de exemplu, Home comutatoare sunt de mica de utilizare. Daca masina
functioneaza pe o varietate de locuri de munca, va fi aproape sigur de a gasi
un diferite 'parte zero'
pentru fiecare loc de munca care nu va avea nici o relatie de orice 'Acasa'
de pozitie care ar putea fi definite. Cu
exceptia cazului in care acestea sunt semnificative pentru aplicatii speciale,
nu exista nici un punct de la instalarea lor.
4.5.1 Comutatoare
Exista mai multe optiuni pe care trebuie sa le faca atunci cand selectati
comutatoare:
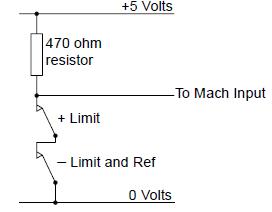
Daca vi se intampla sa aiba doua switch-uri de partajare o intrare, atunci
acestea au nevoie pentru a fi conectat atat semnalul este o logica '1', fie, daca este
exploatata trece (de exemplu, de logica sau functia). Acest lucru este foarte
usor cu mecanice switch-uri. Daca in mod
normal, pe care le-au inchis si persoanele de contact sunt cablate in serie,
asa cum este aratat in figura 4.7, apoi ei
vor da un semnal de active Max fie comutator daca este exploatat. Se refera la
schematic in figura 4.7.
Figura 4.7: Doua In mod normal, inchis Comutatoare Dati un logice SAU
Pentru functionarea, care aveti nevoie
pentru a 'trage' de intrare in port paralel. Dupa cum se poate trece
mecanice
purta o curent, o valoare de 470 ohms se afiseaza care da un curent de
aproximativ 10 miliamperi.
Ca de cabluri la switch-uri pot fi destul de lung si de natura sa ridicata de
zgomot electrice, asigurati-va ca aveti
o conexiune buna la 0 volt partea de intrare (cadrul instrument masina dvs. nu
va fi satisfacator), si ia in
considerare utilizarea de cablu ecranat cu scut conectat la principalul motiv
terminal de controlor.
Daca utilizati electronice
comutatoare ca un slotted detector cu un LED si foto-tranzistor, atunci va
nevoie de un fel de una sau poarta (care ar putea fi un 'fir-SAU' in
cazul in care un active Lo intrare este determinata de deschis colector de tranzistori).
Switch-uri optice, daca la o parte de lichid
de racire, ar trebui sa fie OK pe o masina pentru prelucrarea metalelor, dar
sunt de natura disfunctionalitatii cu
praf de lemn. Figura 4.8 prezinta un exemplu de instalat optice trece.
ArtSoft SUA recomanda impotriva magnetic comutatoare (switch-uri sau stuf Hall
efect dispozitive) pe o masina de taiat
care pot feroase de metal, pentru ca va swarf 'puf-up' magnetul.
Figura 4.8: optica Switch pe Tabelul cu anemoscop pe pat de Masini
Figura 4.9: Doua Switch-uri operate de rame cu Overtravel prevenite printr-un procedeu mecanic opreste
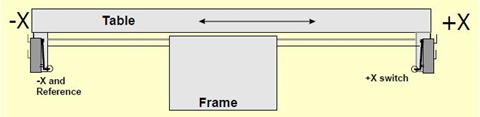
Overtravel este de circulatie a comuta pe care apare dupa ce a operat. Cu o limita de trecere a putea fi cauzate de inertie de unitate. Pe o optice trece ca Figura 4.8, nu vor exista dificultati cu conditia de aripa este destul de mult. Un microswitch pot fi date arbitrare overtravel de operare pe un cilindru este de un sol (a se vedea figura 4-11). Panta de la sol nu, cu toate acestea, se reduce de repetabilitate de functionare a trece. Este posibil, de multe ori pentru a folosi un comutator pentru ambele limite prin furnizarea de doua rampe sau vanes, asa cum se arata in Figura 4.11.
Figura 4.10:
Mill cu Instrumentul de
(Nota cainele este pe Limit Switch) 
4.5.2 In cazul in care pentru a monta
Switch-uri
Alegerea montarea de pozitie pentru switch-uri este de multe ori un compromis intre
mentinandu-le departe de swarf si de
praf si de a folosi flexibile, mai degraba decat fix cabluri.
De exemplu, switch-uri in figura 4.6 si figura 4.8 sunt montate sub masa, chiar
daca au nevoie de un cablu flexibil,
deoarece acestea sunt mult mai bine protejate acolo.
Puteti gasi mai convenabil pentru a avea o miscare cablu cu fire in ea timp de
doua sau mai multe axe (de exemplu,
X si Y axelor de un brat articulat router-ar fi putut trece pe brat articulat
in sine si o bucla de cablu foarte scurt, pentru
pe axa Z, atunci ar putea adera la alte doua). Nu fi tentat sa partajati un
multi-mod cablu intre motor si trece
cabluri. Este posibil sa doriti sa rulati doua cabluri impreuna. Acest lucru nu
va cauza probleme in cazul in ambele
sunt protejate (cu o panglica sau folie), si scuturile sunt fundamentate la un
punct comun la electronice drive.
Figura 4.11: rampe de operare Un Switch
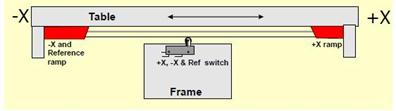
Ati putea
gasi util sa se uite la masini comerciale si de exemple de imagini de pe
ArtSoft SUA
Yahoo! grup pentru mai multe idei si tehnici pentru comutatoare.
www.machsupport.com are o legatura
Yahoo
4.5.3 Cum Mach3 Utilizeaza partajate
Switch-uri
Aceasta sectiune se refera la configuratia de masini mici, in cazul in care
Mach3, mai degraba decat impiedica de externe Logica este controlat de switch-uri.
Pentru o deplina intelegere a acestui va va avea, de asemenea, sa cititi
sectiunea de la capitolul 5 cu privire la configurarea Mach3, dar principiul de baza al switch-uri
de partajare este simpla. Va conectati la doua switch-uri la o limita de intrare (sau de un singur parametru si
doua vanes sau rampe). Va defini, pentru a Mach3, ca o directie de
directie pentru a calatori in miscare,
atunci cand cauta un Home referinta trece. Limita comutator (anemoscop sau la
sol), la care sfarsitul celui de-al axa
este, de asemenea, de origine trece.
In utilizare normala, atunci cand este in miscare Mach3 o axa si isi vede
limita de intrare devin active, se va opri difuzarea (ca de exemplu o impiedica) si o limita de
afisare care trece a fost impiedicat. Veti fi in imposibilitatea de a muta Axa cu exceptia cazului in care:
. Auto Limita suprascrie este pornit (cu un buton de comutare pe ecranul
Setari). In acest caz,
posibilitatea sa faceti clic pe Reinitializare si jog off limita trece. Ar
trebui apoi re-referinta de masini de pozitie.
. faceti clic pe butonul de ignorare Limite. Un rosu aprinde LED-ul va
avertizeaza de a trece peste temporar. Acesta
va permite din nou si sa va Resetare jog off comutatorul si apoi se va
transforma in sine si de a aprinde LED-ul
de pe. Ar trebui apoi re-referinta de masini de pozitie. O intrare poate fi, de
asemenea, definit de a trece peste
Limita de switch-uri.
Retineti ca, desi Mach3 utilizeaza limitat viteza de jogging, alegerea de
directie este in intregime pana la tine. Nimic
va va impiedica, in ambele cazuri, de la jogging pe trece mai departe si,
eventual, crashing axa
intr-o mecanica opri. Ia mare grija.
4.5.4 Home corelarea in actiune
Cand cererea corelarea (prin buton sau GCode) axa (sau axe), care au Home
comutatoare
definite va calatorie (la o viteza redusa selectable) in directia definit pana
Axa apoi se va muta din nou in alta directie, astfel incat sa nu fi de a trece.
In timpul referinta, de
limite nu se aplica.
Cand aveti o axa de referinta, apoi zero sau o alta valoare, care este stabilit
in Home Off (set)
coloana de configurare> intoarce acasa / Limite de dialog, pot fi incarcate
in axa DRO ca sa absoluta
Masina coordona. Daca utilizati la zero, apoi de a comuta Prima pozitie este,
de asemenea, masina de pozitia zero
de axa. In cazul in care merge de referinta in directie negativa de o axa (de
obicei pentru X si Y), atunci te
Tabelul-X + XFrame-X andReferenceramp + X, X & Ref switch-X + rampa
ar putea obtine referinta pentru a incarca ceva de genul -0.5 'in DRO.
Aceasta inseamna ca Prima este o jumatate de
inch clar de limita. Acest deseuri un pic de axa de calatorie, dar daca se
abate de la tine, atunci cand jogging pentru a Home, nu veti accidental excursie limitele. Vezi,
de asemenea, Software limite ca un alt mod de a rezolva aceasta problema.
Daca soliciti Mach3 pentru referinta, inainte de a trece de pe jog, atunci se
va deplasa in directie opusa
de la ei 'de referinta' directie (pentru ca masina deja pe Acasa
comutator) si opri in cazul in care Masina
se pe trece. Acest lucru este unul bun, atunci cand aveti un separate Home
trece sau sunt la limita la de referinta
sfarsitul celui de-al axei. Daca, totusi, sunteti pe de alta Limita comutator
(Mach3 si nu pot sti aceasta, in cazul
in care sunt partajate comutatoare), atunci axa va deplasa de la punctul real
Home pana cand erori. Deci, sfatul este
intotdeauna jog atent la limita de pe switch-uri, apoi de referinta. Daca
sunteti interesat despre aceasta
problema, este posibil pentru a configura Mach3 astfel ca nu va jog automat de
pe home trece.
4.5.5 Alte Acasa si Limita Opþiuni
si Sugestii
4.5.5.1 Prima Switch nu Apropiat Limit
Switch
Este, uneori, nu este convenabil pentru a avea Home trece la o limita de
calatorie. Luati in considerare o mare miscare coloana podea mill sau un mare raboteza-mill. Z calatorie pe coloana ar
putea fi de
este in partea de sus a coloanei, apoi corelarea-ar putea implica aproape 16 de
metri de lent Z calatorie. Daca de referinta pozitie a fost aleasa o jumatate de drum coloana, atunci acest timp
poate fi redus la jumatate. O astfel de masina ar fi separata Home comutator pentru axa Z (prin
urmare, necesita o alta intrare in port paralel, dar numai
patru intrari intr-o masina de trei axe) si-ar folosi de capacitatea de a
stabili Mach3 orice valoare pentru o axa DRO, dupa referinta, pentru a face masina-Z zero sa fie in partea de sus
a coloanei.
4.5.5.2 separate High Accuracy Home
Switch
The X si Y axe pe o masina de mare precizie, ar putea avea un separate Home
comutator pentru a atinge
acuratetea necesara.
4.5.5.3 Limita Switch-uri din mai multe
axelor Conectare Impreuna
Mach3 deoarece nu ia nici o notificare din care limita de care axa a impiedicat,
apoi toate limitele pot fi hranite ORed
impreuna si intr-o singura Limita de intrare. Fiecare axa apoi poate avea
propriile sale Home referinta conectat
la trecerea de referinta de intrare. O masina de trei axe inca are nevoie de
doar patru intrari.
4.5.5.4 Prima Switch-uri din mai multe
axelor Conectare Impreuna
Daca sunteti cu adevarat scurt de intrari
4.5.5.5 Slaving
Pe un brat articulat de tip mill router sau in cazul in care cele doua
'picioare' de brat articulat sunt conduse de motoare separate,
apoi fiecare cu motor trebuie sa fie
condusa de propria axa. De exemplu, in cazul in care se muta in brat articulat
Y directie, apoi Axa A ar trebui sa fie
definite ca un liniar (de exemplu, ne-rotatie) si axa A ar trebui sa fie slaved
proprii trece. Referinta, prin urmare, va corecta orice tiraj (de exemplu, din
squareness) din brat articulat, care ar
fi avut loc in cazul in care masina a fost oprit sau deoarece a pierdut pasi.
4.5.6 Rezumatul cabluri diagrama
Cabluri de diagrama in Figura 4.12 ofera un exemplu al modului in care diferite
piese dintr-un sistem de CNC
ar putea merge impreuna. Diagrama nu este neaparat completa, dar arata de
componente principale. Nota relatia
dintre diferite parti: sursa de alimentare, cu motor driver panouri, un
breakout bord, stepper motoare, si
limita de switch-uri. Dvs. de configurare ar putea sa nu neaparat duplicat de
ceea ce este aratat aici, dar diagrama
ar trebui sa va dau o idee de ceea ce incearca sa realizeze. La bord va
breakout probabil au propriile surse de
alimentare separate. Toate motive, inclusiv orice cablu scuturi, trebuie sa o
cravata singur punct. Consultati
documentatia de la producatori pentru anumite detalii.
Figura 4.12: Exemplu de cabluri diagrama
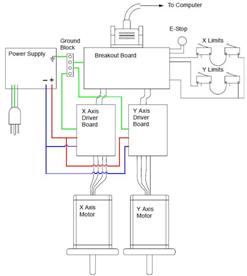
4.6 ax de control
Exista trei modalitati diferite in care Mach3 posibilitatea de a controla
masina ax, sau puteti sa ignorati toate
de acestea si de control manual.
1. Relay / contactor de control a autovehiculelor Pe (in sensul acelor de
ceasornic sau de ceasornic), precum si autovehiculelor Dezactivat.
2. Motor pas si controlata de catre Directia de impulsuri (de exemplu, este un
ax cu motor servo).
3. Motor controlate de catre un puls latime modulata semnal.
4.6.1 ON / OFF Motor Control
M3 si un ecran de buton se va solicita ca ax incepe intr-o directie in sensul acelor
de ceasornic. M4 va cere ax ca incepe
intr-o directie de ceasornic. M5 solicita ca ax se opreste. M3, M4 poate fi configurat pentru a activa externe
semnale de iesire, care pot fi asociate cu pin de iesire de pe paralel porturi. Apoi sarma aceste rezultate
(probabil prin relee) de control al motorului pentru contactoare calculatorul dumneavoastra.
Desi acest sunet simplu, in practica, trebuie sa fii foarte atent. Cu exceptia
cazului in care aveti cu adevarat nevoie de
a rula ax in sens invers, ar fi mai bine pentru a trata M3 si M4 ca acelasi
sau, pentru a permite M4, pentru a activa
un semnal ca nu va conectati la nimic.
In mod evident, este posibil, intr-o eroare de situatie, in sensul acelor de
ceasornic si de semnale de ceasornic pentru a fi activ impreuna. Acest lucru poate cauza contactoare
la scurt principalele surse de alimentare. Special mecanic interlocked inversarea contactoare pot fi obtinute si,
daca aveti de gand sa-ti permite sa rulati ax de ceasornic,
Apoi, va trebui sa utilizati una. O alta dificultate este ca 'GCode'
definitie spune ca este valabil de a emite
un ax M4 in cazul in care se executa in sensul acelor de ceasornic in cadrul
unui M3 (si vice-versa). Daca va ax unitate
este un motor de curent alternativ, pe loc schimbarea de directie, atunci cand
ruleaza la viteza maxima, este de gand sa
impune foarte mare de forte de pe disc mecanice din masina si, probabil, va
sufla din AC fitil sau o excursie
disjunctor. Pentru siguranta, ai nevoie de timp pentru a introduce intarzieri
cu privire la functionarea din contactoare
sau de a folosi o unitate moderna invertor care va permite de a schimba
directia cu un motor care ruleaza.
A se vedea, de asemenea, nota cu privire la un numar limitat de activare Relay
Semnale in sectiunea 4.7, lichid de racire.
4.6.2 Pasul si Directia Motor Control
Daca va ax motor este un servo motor cu un pas si directia de unitate (cum ar
fi axa drive), apoi ai puteti configura
doua semnale de iesire pentru a controla viteza si directia de rotatie. Mach3
va lua in considerare de o variabila pas
troliu conduce vehicule sau de cutie de viteze intre motor si ax. Pentru
detalii complete vezi Motor Tuning de la
capitolul 5.
4.6.3 PWM Motor Control
Ca o alternativa
Figura 4.13: A 50% Puls Latime modulata Semnal
Figura 4.14: A 20% Puls Latime modulata Semnal
Figura 4.13
si Figura 4.14 arata pulsul latime de aproximativ 50% din ciclul si de 20%
din ciclu Pentru a activa PWM ax viteza
intr-un semnal de tensiune DC proportionala, pulsul semnal trebuie sa fie
transformate.
In esenta, un circuit trebuie sa fie utilizate pentru a gasi media pulsul
latime modulata semnal. De circuit poate
fi un simplu condensator si rezistenta, sau poate fi mult mai complexe in
functie (a) cu privire la modul liniar
doriti ca relatia dintre latime si tensiunea de iesire de final, si (b) cu
privire la viteza de raspuns de care
aveti nevoie pentru a schimba puls latime.
PWM este un semnal de iesire de pe
ax Pasul PIN. Va trebui sa ia masuri speciale de precautie pentru a comuta de pe motor cu un debit mic, folosind Motor
in sensul acelor de ceasornic / iesirile de ceasornic.
Se refera la producatorului documentatia care ar trebui sa vina cu controllerul
tau. Mai multe detalii mai
fi gasit folosind 'PWM convertizor' sau 'PWM Digispeed' ca
un termen de cautare Google sau de la dumneavoastra preferate motor de cautare.
Nota: Multi utilizatori au constatat
ca PWM si alte viteza variabila ax unitati sunt adesea o grava sursa de zgomot electrice, ceea ce poate
cauza probleme cu masina de axa drive, limita trece senzor etc Daca utilizati o astfel de unitate ax,
ArtSoft SUA recomanda insistent sa utilizati un izolate optic breakout bord si scut pentru a avea grija de
cabluri si rula puterea de cabluri cateva inch departe de cabluri de control. Trebuie sa aiba grija cu
electronica, ca de multe intrari ieftine PWM de viteza controlere nu sunt izolate de la principalele
surse de alimentare.
4.7 lichid de racire
Semnalele de iesire pot fi folosite pentru a controla sau de supape pentru
pompe de inundatii si de aburi de racire. Acestea sunt activate
prin butoanele de ecran si / sau M7, M8, M9.
4.8 cutit Directia de Control
Rotary axa A poate fi configurat astfel incat acesta roteste pentru a se
asigura ca un instrument ca un cutit este tangential la directia de miscare in G1 se muta din X si Y. Aceasta
permite punerea in aplicare a unui vinil sau tesatura de taiat cu deplin controlate cutit.
4.9 Digitize Probe
Mach3 poate fi conectat la o persoana de contact digitizarii sonda pentru a
face un model de masurare si digitizarii sistem.
Nu este un semnal de intrare, care indica faptul ca sonda a facut si furnizarea
de contact pentru o iesire de a solicita
ca un lectura este luata de un non-contact (de exemplu, cu laser) sonda. Pentru a fi util, de sonda trebuie sa aiba un
scop precis sferica (sau cel putin o parte a unei sfere) montate in ax cu centru de precizie pe
centerline de ax si un fix la distanta de
la un punct fix in directia Z (de exemplu, ax nas). Pentru a fi capabil de
cercetare non-metalic
materiale (si, de multe modele de digitalizare se va face in spuma, MDF sau
plastic), sonda necesita pentru a face
(sau pauza) a trece cu un minut deviere de la varful in orice (XY sau Z) de
directie). In cazul in care sonda este
de a fi utilizate cu un automat de toolchanger, de asemenea, atunci ea trebuie
sa fie 'fara fir'. Aceste cerinte sunt o provocare majora pentru un designer de
sonda pentru a fi construit intr-un atelier de lucru acasa, si comerciala
sonde nu sunt ieftine. O caracteristica de dezvoltare este pusa in
aplicare pentru a permite utilizarea unui laser sonda.
4.10 liniare (sticla Scala)
codificatoare
Mach3 are patru perechi de intrari pentru fiecare dintre care un encoder cu
quadrature rezultate poate fi conectat.
In mod tipic, acestea ar putea fi 'de sticla scara' codificatoare.
Figura 4.15 arata un exemplu. Mach3 va afisa pozitia de fiecare din aceste codificatoare de pe un dedicat DRO,
prezentat in Figura 4.17. Aceste valori pot fi incarcate si la salvat de a principalelor axe DROs.
Figura 4.15:
Glass Scala Encoder
In
interiorul sau in caz de codificare este un pahar (sau, uneori, de plastic) a
hotarat, cu benzi de linii, de multe ori 10 microni largi, separate de aceeasi marime clar spatiu.
O lumina stralucitoare pe o phototransistor prin hotararea
genereaza un semnal de forma A demonstrat ca in Figura 4.16. Un ciclu complet
corespunde o miscare de 20 de microni.
Figura 4.16: Quadrature Semnale
O alta
lumina si phototransistor situat 5 microni (in acest exemplu) de la primul s-ar
putea
genera semnal B sfert dintr-un ciclu de
Observati ca un semnal, fie A sau B, modificari la fiecare 5 microni de
circulatie astfel de rezolutie, in functie de dimensiunile este de 5 microni. Va pot spune in ce fel se
misca de succesiune de modificari. De exemplu, daca B merge Lo de
Figura 4.17: Encoder DROs
Mach3
asteapta semnale de logica. Unele scale de sticla (de exemplu, anumite
Heidenhain modele) sa prezinte un analog val de sine. Acest lucru permite inteligent electronica pentru a
introduce la o rezolutie mai mare de 5 microni. Daca doresc sa utilizeze aceste codificatoare,
atunci aveti nevoie pentru a patrat in afara de unda cu un amplificator
operational / comparator. TTL
codificatoare de iesire se va conecta direct la intrare PINS de port paralel,
dar, ca zgomot va da false conteaza, ele
sunt mai bine interfaced prin ceea ce este cunoscut ca un Schmitt declansa
chip. Baremele de nevoie de o
aprovizionare DC (5 volti) pentru lumini, precum si orice conducator auto
chipsuri in ele.
Note:
. Nu se poate folosi cu usurinta o scala liniara, ca feedback-ul de codificare
pentru un servo unitate, astfel cum a fost cea mai mica backlash sau elasticitate in mecanica conduce
va face servo instabila.
. Nu este usor pentru a se conecta la rotativ codificatoare pe servo motor cu encoder
DROs, desi acest lucru ar fi atractive
pentru manualul de functionare a axelor cu pozitia citire. Problema este
ca 0 volt (comuna) in interiorul servo
utilizate pentru a conduce autovehicule codificatoare este aproape sigur, nu
a acelasi 0 volt ca PC-ul sau breakout
bord. Conectarea acestora impreuna vor cauza probleme - nu se tentati sa o facem!
. Principalul beneficiu de a folosi liniar codificatoare liniare pe axele lor este
ca masuratorile nu depind cu privire la
exactitatea sau backlash a conduce surub, curele, lanturi etc
4.11 ax Index Puls
Mach3 are o intrare pentru una sau mai multe impulsuri generate de fiecare
revolutiei de la ax. Mach3Mill poate
utiliza pentru a afisa acest efectiv viteza de ax. In Mach3Turn, ea poate fi
utilizata pentru a coordona circulatie a
unui instrument de lucru si atunci cand taierea fire si pentru orientating de
instrument pentru partea din spate plictisitor conserve de ciclu. Acesta poate
fi utilizat pentru a controla hrana pentru animale pe o pe-REV, mai degraba
decat pe minut baza.
4.12 Charge Pump - o Puls Monitor
Mach3 va iesire un puls constant de tren a caror frecventa este de aproximativ
12.5 kHz pe una sau ambele
in paralel, porturi, ori de cate ori acesta se executa corect. Acest semnal nu
va fi acolo in cazul in care nu a Mach3
fost incarcate, se impiedica de la mode, sau in cazul in care generatorul de
impulsuri de tren nu in vreun fel. Puteti utiliza acest semnal de a percepe un condensator printr-o pompa de
diode (de aici numele), a caror productie, arata Mach3 lui de sanatate, permite
dvs. si axa ax drive etc Aceasta functie este adesea pusa in aplicare in
comercial breakout panouri.
4.13 Alte functii
Mach3 accepta cincisprezece OEM Trigger semnalele de intrare pe care o puteti
aloca pentru uz propriu. De exemplu, acestea
pot fi utilizate pentru a simula click pe un buton sau pentru a apela
utilizator scrise de macro-uri.
In plus, exista patru factori de utilizator, care poate fi interogat in
macro-uri de utilizator.
# 1 de intrare pot fi folosite pentru a inhiba ruleaza din partea programului.
De asemenea, poate fi conectat la gardienii pe calculatorul dumneavoastra.
Detalii complete de arhitectura de intrare Emulation sunt prezentate in Mach3
Personalizare wiki. De setup dialog este
definit in sectiunea 5.
Relay de activare a rezultatelor care nu sunt utilizate pentru ax de racire si
poate fi utilizat de catre tine si controlata
in user-scris macro-uri. Si un final
ne-am gandit - inainte de a va dus cu aplicare de la prea multe caracteristici,
in acest capitol, amintiti-va ca nu
aveti un numar nelimitat de intrari / iesiri. Chiar si cu doua paralele
porturile sunt numai zece intrari de sprijin pentru toate functiile si, cu
toate ca o tastatura emulator pot da
mai multe intrari, acestea nu pot fi utilizate pentru toate functiile. Este
posibil sa fi pentru a utiliza un dispozitiv pentru a ModBus semnificativ extinde personalizat de intrare / iesire.
4.14 Exemplu de schematica a opri si a
limitelor Utilizarea relee
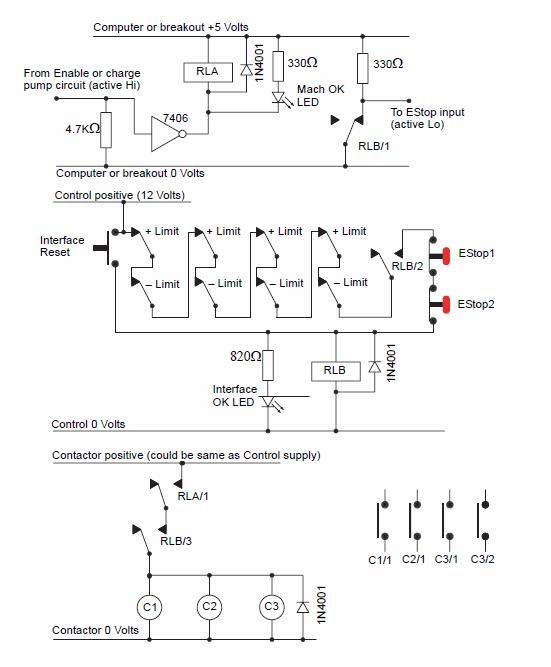
Circuit
Note:
Acest circuit reprezinta doar o posibilitate de configurare pentru extern
conectat-limita de switch-uri. Daca
nevoie de switch-uri de referinta, atunci ar trebui sa fie separate de cele si
conectat
Relay de contact sunt prezentate in lor de-energized pozitie. Limita de
comutatoare si butoane sunt in
non-operate pozitie.
Holding interfata Resetare buton va permite Mach3 Resetare buton pentru a fi
presat de axe si de a fi
jogged off lor limita intrerupatoare. Interfata Resetare buton va pricepe.
Relay A (RLA) trebuie sa aiba la dispozitie o in mod normal deschis (NO) de
contact. Aceasta trebuie sa aiba un 5-volt bobina, care este de cel putin
150 Ohms deci nu necesita mai mult de 33 miliamperi. Omron parte numarul
G6H-2100-5 este potrivit si
are contacte evaluat la 1 amper, 30 de volti DC.
Relay B (RLB) trebuie sa aiba la dispozitie un NC si doi Nici o persoana de
contact. Aceasta poate avea orice convenabil bobina de tensiune la
costum un disponibil de alimentare. In comuna de acest lucru ar trebui, in mod
ideal, nu trebuie sa fie pe PC-ul lui 0 volt feroviare, pentru a evita
lung lungimi de cabluri pentru a limita si a impiedica de switch-uri, care pot
induce zgomot. De Omron MY4
seria ar trebui sa fie adecvate, cu patru contacte evaluat de 5 Amperi, AC 220
de volti.
De LED-uri sunt optionale, dar util pentru a arata ceea ce se intampla. Actuala
limitarea rezistenta pentru
Interfata OK LED va fi nevoie sa se 1.8K ohms daca a 24-volt de aprovizionare
este utilizat.
In cazul in care bobina tensiuni sunt adecvate, atunci se poate utiliza
contactoare de 'control' pozitive si comune de aprovizionare.
Intelegerea din contactoare (colaci demonstrat ca C1, C2, C3) depinde de
unitatea de alimentare
aranjamente si cabluri de motoare pentru masini unelte. Tu ar trebui sa
urmareasca pentru a comuta pe DC aprovizionare
la steppers sau servos dupa uniformizare condensator pentru a se asigura un
prompt opri. Este posibil sa doriti sa
rewire ax si de racire a motoarelor, astfel incat controlul contactor nu-intors
de nu-volt eliberare Circuit
(care este, poate ca doriti sa treceti de motor conduce dupa principalele
masini contactoare). Nu
parts contacte pe o anumita contactor intre AC aprovizionare si stepper / servo
DC de aprovizionare, pentru ca
a crescut foarte mult riscul de un scurt-circuit intre aceste bunuri. Cere un
sfat, daca nu sunteti sigur,
mai ales inainte de lucru cu 220/440 3-faze circuite.
Prinderea diode peste releu contactor colaci si sunt necesare pentru a absorbi
din spate atunci cand emf
comutarea de pe curent in colaci. Contactoare mai vin cu potrivit bobina suprimarea
circuite construit
inch
Acesta este un gol stanga paginii pentru doua tipuri de efecte de imprimare.
Capitolul 5 Configurarea Mach3 pentru
masina dvs. si Drives
Daca ati cumparat o masina unealta interfaced deja la un computer care executa
Mach3, atunci va
probabil ca nu trebuie sa cititi acest capitol (cu exceptia afara de interes
general). Parerea furnizor, probabil, va
Mach3 au instalat software-ul si set-l si / sau va fi dat instructiuni
detaliate cu privire la
ce sa fac.
ArtSoft SUA va recomanda sa pastrati o copie a tiparite cum versiunea dvs. de
Mach3 este configurat.
Informatiile vor fi extrem de util daca aveti nevoie sa re-a instala
software-ul de la zero.
Mach3 stocand aceste informatii intr-o. Fisier XML in Mach3 dosar pe care le
puteti vizualiza si print.1 Daca
a creat un profil personalizat pentru dvs. de configurare, astfel cum a fost
recomandat in sectiunea 2.3, Mach3 Profile, acolo
va fi o. fisier XML ( 'MyMill.xml', sau orice ai numit dvs. de
profil), in Mach3 dosar continand
ca profil de informatii. Desi ai putea edita. Fisier XML, ArtSoft SUA recomanda
in care nu aveti. Schimbati Mach3 configurare numai prin programul dialoguri.
5.1A Configurare Strategia
Acest capitol contine o multime de detalii. Totusi, ar trebui sa gasim in procesul
de configurare pentru a fi
simplu, daca luati-o pas cu pas, de testare, astfel cum te duci. O buna
strategie este de a trece in zbor de capitol,
apoi printr-o munca de pe computerul dumneavoastra si masina unealta. Ar trebui
sa aveti deja instalat Mach3 pentru
uscat ruleaza descrise in Capitolul 3.
Practic toate munca pe care o va face in acest capitol se bazeaza pe casete de
dialog a ajuns de
Config
ceea ce inseamna ca alegeti porturi si Pins intrarea din meniul de configurare.
5.2Initial de configurare
Inceput cu Config> Ports Pins si de dialog. Figura 5.1 arata aceasta
selectie de pe meniul de configurare.
Porturi si Pins dialog are multe file, dar cea initiala este asa cum se arata
in figura 5.2.
1. Implicit fisierele de configurare sunt Mach3Mill.xml, Mach3Turn.xml, si
Plasma.xml.
5-2
Figura 5.1: Selectarea porturi si Pins Dialog din Config Meniu
5.2.1
Definirea Adresele Port (e) de a utiliza
Selectati Port Setup si Axa de selectie pe fila Ports Pins si de dialog, asa
cum se arata in figura 5.2.
Figura 5.2: Port Setup si Axa Selectia Tab pe porturi si Pins Dialog
Daca aveti
de gand sa folositi doar un port paralel, si acesta este cel de pe placa de
baza a computerului, apoi
implicit adresa Port 1 din 0x378 (hexadecimal 378) este aproape sigur corecte.
5-3
Daca folositi unul sau mai multe PCI add-on port paralel carduri, atunci va
trebui sa se stabileasca
adresa la care fiecare raspunde. Nu exista standarde! Deschideti Windows Panoul
de control de
Windows
buton. Extindeti arborele pentru element Ports (COM & LPT).
Faceti dublu clic pe primul sau ECP LPT port. Proprietatile sale vor fi afisate
intr-o fereastra noua. Alegeti
Resurse fila. Primul numar in primul rand IO gama este adresa la utilizare.
Nota de valoare si
aproape de dialog Proprietati.
Nota: Instalarea sau eliminarea PCI orice carte poate schimba adresa unui port
paralel PCI carte, chiar daca
nu v-ati atins-o.
Daca aveti de gand sa folositi un al doilea port, repetati pasii de mai sus
pentru el.
Inchideti Manager dispozitive, Proprietati sistem, si Panoul de control Windows.
Introduceti adresa care tocmai l-ati uitat ca la primul port de pe adresa de
port Setup si Axa de selectie
de dialog. Nu ofera 0x prefix sa spun este Hexadecimal, ca Mach3 presupune
acest lucru. Daca este necesar,
verifica activat pentru port 2 si introduceti adresa sale in acelasi mod.
Acum, dati clic pe butonul Apply pentru a salva aceste valori. Acesta este cel
mai important. Mach3 nu va amintesc de
valori, atunci cand trece de la tab-ul la tab-ul sau aproape de Port & Pins
dialog cu exceptia cazului in care faceti clic pe Se aplica.
5.2.2 Alegerea Kernel Speed
Mach3 de conducator auto poate rula la frecvente de la 25000 Hz (impulsuri pe
secunda) pana la 100.000 Hz,
in functie de viteza de procesor si alte sarcini pus pe el cand se ruleaza Mach3.
Frecventa ai nevoie depinde de rata maxima puls care aveti nevoie pentru a
conduce orice axa la inceput
viteza. 25,000 Hz, probabil, vor fi potrivite pentru sistemele de stepper
motor. Cu un pas 10 micro-driver
cum ar fi un Gecko 201, veti avea in jur de 750 RPM de la un standard de 1.8
grade stepper motor cu o
25000 Hz rata puls. Mai mari rate de puls, sunt necesare pentru a realiza dorit
motor RPM servo pentru unitatile
au de inalta rezolutie ax codificatoare de pe motor. Mai multe detalii sunt prezentate
in sectiunea privind motor tuning
si in sectiunea 4.4.2, Determinarea Axa Drive Cerinte.
Calculatoare cu o viteza de 1 GHz ceas aproape sigur va fi capabil sa ruleze la
35000 Hz, astfel incat va puteti
alege aceasta, daca aveti nevoie de un mare pas rata (de exemplu, daca aveti
foarte bine pitch conduce suruburi).
Demonstrarea versiune de Mach3 va rula la 25,000 Hz numai. In plus, daca este
Mach3 cu forta
inchise, apoi la re-start acesta va reveni in mod automat la 25.000 Hz
operatiune. Valoarea reala a frecventei de
ruleaza sistemul este afisat pe ecran standard de diagnostic.
Faceti clic pe caseta de langa dorit nucleu de viteza.
Nu uitati sa faceti clic pe butonul Apply inainte de a incepe.
5.2.3 Definirea speciale
Portul de instalare si Axa Selectia include casete de dialog pentru o varietate
de configuratii speciale.
Ei ar trebui sa se auto-explicative, daca aveti de hardware-ul de pe sistem.
Daca nu, atunci
lasa apoi bifat.
Nu uitati sa faceti clic pe butonul Apply inainte de a incepe.
5-4
5.3Defining de intrare si iesire semnale de utilizare
Acum, ca s-au stabilit in configuratia de baza, este timpul pentru a defini
care semnalele de intrare si iesire
va folosi si pe care port paralel si PIN-ul va fi utilizat pentru fiecare semnal.
Documentatia pentru
breakout bord va pot oferi consultanta in ceea ce iesirile de a utiliza in
cazul in care acesta a fost conceput pentru a fi utilizate cu
Mach3, sau la bord pot fi livrate cu un schelet Profil (. XML) fisier cu aceste
conexiuni
deja definite.
5.3.1 Axa ax de iesire si semnale pentru a fi utilizate
Vezi Motor Rezultate fila din porturi si Pins de dialog. Aceasta va arata
similar cu figura 5.3.
Figura 5.3: Rezultate Tab Motor pe porturi si Pins Dialog
Definiti in
cazul in care unitatile de X, Y si Z axe sunt conectate, si faceti clic pe
Enabled in coloana de
obtine un control pentru a marca permite acestor axe. Daca oricare axa este
activata ca nu ar trebui sa fie, faceti clic pe Enabled
coloana de schimbare a verifica verde rosu la un X.
Daca aveti nevoie pentru a edita orice cutii in Pasul Pin #, Dir Pin #, Pasul
Port, Dir Port sau coloane, dubluclick
casetele corespunzatoare si editati intrarile.
Daca dvs. de interfata hardware (de exemplu, Gecko 201 stepper driver) necesita
un semnal de lo-activa, sa se asigure ca
Aceste coloane sunt verificate pentru pas si Dir (ECTIUNEA) semnale.
Daca aveti rotativ sau slaved axe, atunci ar trebui sa permita si configurarea
acestora.
In cazul in care se intinde de viteza va fi controlata de catre parte, apoi ati
terminat aceasta fila. Faceti clic pe butonul Apply
pentru a salva datele de pe aceasta fila.
Activati ax ax de viteza, daca va vor fi controlate de Mach3. Aloca un pas de
aderenta / port pentru ea, daca
folosind impulsuri modulate latime de control cu relee pentru a controla
directia sale, sau aloca Pasul si Directia
PINS / porturile in cazul in care acesta are control complet. De asemenea,
trebuie sa se defineasca in cazul in care aceste semnale sunt active-lo. Cand
ati terminat, faceti clic pe
Aplicati pe buton pentru a salva datele de pe aceasta fila.
5.3.2 intrare semnale pentru a fi utilizate
Acum selectati fila semnale de intrare. Aceasta va arata ca figura 5.4.
Figura 5.4: Tab Semnale de intrare pe porturi si Pins Dialog
Notice bara
de derulare la partea dreapta a ferestrei. Tabelul 5-1 da lista completa a
semnalelor de intrare.
Acest lucru presupune ca discutia pe care ati ales unul din home / limita trece
configuratii este descris in
Sectiunea 4.5, Limita si Home Switch-uri.
. Daca ati implementat o configurare de la punctul 4.5, cu limita de switch-uri
conectate impreuna
pentru a declansa o opri sau dezactiva axa drive prin unitatea electronica,
atunci nu trebuie sa
selectati oricare din limita intrarilor (X + +, X -, etc.)
Tabelul 5.1: Lista de posibile Semnale de intrare
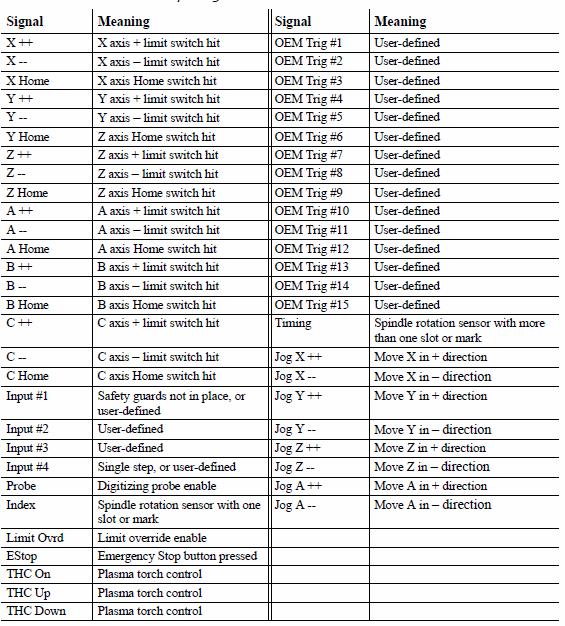
Acest lucru
presupune ca discutia pe care ati ales unul din home / limita trece
configuratii este descris in
Sectiunea 4.5, Limita si Home Switch-uri.
. Daca ati implementat o configurare de la punctul 4.5, cu limita de switch-uri
conectate impreuna
pentru a declansa o opri sau dezactiva axa drive prin unitatea electronica,
atunci nu trebuie sa
selectati oricare din limita intrarilor (X + +, X -, etc.)
. Daca doua
implementat de configurare de
X, Y, Z si a axelor. Activati Home comutatoare cutii pentru aceste axe, si sa
defineasca Port / pin la
pe care fiecare este conectat. Daca vi se combina si limitele Home trece ca un
semnal, atunci
ar trebui sa permita Limit -, Limita + +, Acasa si pentru fiecare axa si
aloca aceeasi aderenta la Home,
Limita -, si pentru a se limita + +.
In cazul in prezent, de asemenea, sa configurati axe A, B si C.
# 1 de intrare este special prin faptul ca poate fi folosit pentru a inhiba
ruleaza o parte de program de paza de siguranta atunci cand nu sunt in
loc. Celelalte trei (# 1 si in cazul in care nu sunt utilizate pentru paza
conexa) sunt disponibile pentru uz propriu si
pot fi testate in codul de macro-uri. Input # 4 pot fi utilizate pentru a
conecta un pushbutton externe pentru a comuta
punerea in aplicare a functiei singur pas. Ati putea sa le configurati mai
tarziu.
Activeaza si defini Index Puls daca aveti un ax senzor doar cu un singur slot
sau marca.
Activeaza si defini Limite de ignorare daca sunt Mach3 anuntandu-va controlati
limita intrerupatoare si pe care le-ati
un buton extern care va presa, atunci cand aveti nevoie pentru a jog off o
limita. Daca nu aveti nici o trecere apoi
puteti utiliza un ecran de buton pentru a obtine aceeasi functie.
Activeaza si defini impiedica de a indica
Activeaza si defini OEM Trigger intrarilor daca doriti semnale electrice sa
poata apela OEM buton
functii fara un ecran buton fi nevoie sa fie furnizate.
Activeaza si defini Temporizare daca aveti un senzor ax cu mai mult de un slot
sau marca.
Activati Probe pentru digitizarii.
Activati Pe THC, THC Sus, si THC Down pentru controlul unui Plasma torta.
Activeaza si defini Jog intrari separate, daca aveti Jog butoane pentru
control. (Tastatura arrow chei
Jog oferi control, in orice caz.)
Daca aveti un port paralel, atunci ai avea la dispozitie 5 intrari. Cu doua
porturi, exista 10 (sau cu
PINS 2 - 9 definite ca intrari, 13). Este foarte frecvente pentru a afla care
le sunt scurte de semnale de intrare, in special
Daca doriti sa aiba unele intrari pentru sticla scari sau alte codificatoare.
Este posibil sa trebuiasca sa compromita
lucruri de care nu are ca o fizice Limita de ignorare comutator pentru a salva
semnale.
Puteti, de asemenea, in considerare, folosind o tastatura emulator pentru
anumite semnale de intrare. Timpul de raspuns va fi
mai lent decat cu un port paralel. A se vedea Sectiunea 5.3.3.
Faceti clic pe butonul Apply pentru a salva datele de pe aceasta fila.
5.3.3 imitat Semnale de intrare
Daca verifica imitat coloana pentru o intrare, apoi Port / numarul de pin si
activ-lo de stat pentru ca
semnalul va fi ignorat, dar de la intrarea in Hotkey coloana vor fi
interpretate. Cand un element-cheie in jos
mesajul este primit cu codul care se potriveste cu un Hotkey valoare, apoi ca
semnalul este considerat a fi
activa. In cazul in care o cheie-up este mesajul primit, atunci este inactiv.
Cheia-cheie in sus si in jos, semnale de obicei provin de la un emulator de
tastatura (cum ar fi Ultimarc IPAC
sau Hagstrom), care este declansat de switch-uri conectate la intrarile sale.
Aceasta permite mai multe switch-uri pentru a fi
simtit mult rezerva PINS pe porturile paralel, dar pot exista intarzieri
semnificative timp inainte de
comuta schimbare este vazut. In plus, un element-cheie in sus sau in jos
mesaj-cheie poate ajunge pierdut de Windows.
Imitat semnalele nu pot fi folosite pentru Index sau calendarul si nu ar trebui
sa fie utilizate pentru opri.
5-8
5.3.4 Semnale de iesire
Utilizati fila Semnale de iesire pentru a defini rezultate care aveti nevoie. A
se vedea figura 5.5.
Figura 5.5: Tab Semnale de iesire pe porturi si Pins Dialo
Notice bara de derulare pe partea dreapta a ferestrei. Tabelul 5.2 ofera o lista completa de semnale de iesire.
Tabelul 5.2: Lista de posibile Semnale de iesire
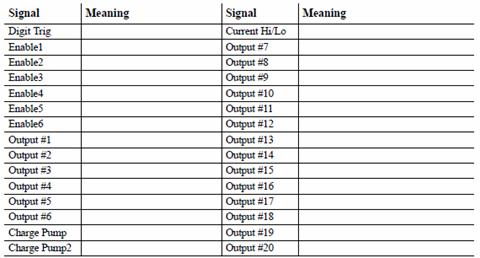
Tu,
probabil, vor dori sa utilizeze doar un singur Activati iesire (ca toate
unitatile axa pot fi conectate la acesta). Daca
pe care il folositi taxa pompa / puls monitor facilitate, atunci puteti permite
dvs. axa unitatile sale de la
iesire.
De iesire # semnalele sunt pentru a fi utilizat pentru a controla un stop /
start ax (in sensul acelor de ceasornic si, optional, de ceasornic),
de inundatii si Mist pompe de racire sau de valve, si de control de catre
propriul dvs. personalizat Mach3
butoane sau macro-uri.
Tariful Pump linie trebuie sa aiba posibilitatea de definit si, daca va
breakout bord accepta acest puls de intrare pentru a
continuu verifica functionarea corecta a Mach3. Charge Pump2 este utilizat daca
aveti un al doilea breakout
bord conectat la cel de-al doilea port sau daca doriti, pentru a verifica modul
de functionare a celui de-al doilea port in sine.
Faceti clic pe butonul Apply pentru a salva datele de pe aceasta fila.
5.3.5 Definirea Encoder si Manual Puls Generatorul (MPG) Consumul
Utilizati Encoder / MPGs tab-ul pentru a defini conexiuni si rezolutia liniara
codificatoare sau Manual
Puls generatoare (MPGs) utilizate pentru jogging de axe. A se vedea figura 5.6.
Figura 5.6: Encoder / MPG fila pe porturi si Pins Dialog

Acest dialog
nu are nevoie de un activ-lo selectie. In cazul in care codificatoare conta in
mod gresit, la fel de swap
PINS alocate pentru intrarile A si B.
5.3.5.1 Setarea codificatoare
Considerat de pe unitatea de valoare ar trebui sa fie stabilite pentru a
corespunde cu rezolutia de codificare si selectia dvs.
nativi de unitati. De exemplu, o scala liniara, cu hotararile la 20 microni
produce un conta la fiecare 5
microni (amintiti-va de quadrature semnal), sau 200 conteaza pe unitate
(milimetri). Daca aveti Native
set de unitati de inch, atunci ar fi de 200 x 25,4 = 5080 conteaza pe unitate
(inch) deoarece exista 25.4
milimetri per inch. Viteza de valoare nu este folosit.
5.3.5.2 Setarea MPGs
Considerat de pe unitatea de valoarea defineste numarul de quadrature conteaza
ca trebuie sa fie generate de
Mach3 la sensul de circulatie a MPG. Pentru a 100 conteaza-pe-revolutie (CPR)
encoder, o valoare de 2
ar trebui sa fie adecvate. Pentru mai mare rezolutie, veti dori probabil sa
creasca aceasta valoare pentru a obtine
mecanice de sensibilitate pe care o doriti. O valoare de 100 de lucrari de bine
cu 1024 CPR codificatoare.
Viteza valoare determina scalarea de impulsuri trimise la axa fiind controlate
de MPG. De
mai mici de date in Velocity valoare, cu atat mai rapid axa se va muta.
Valoarea acesteia este cel mai bun set de experiment pentru a
da un rezonabil axa de circulatie, atunci cand viteza de filare a MPG la fel de
rapid ca este confortabil.
5.3.6 Configurarea ax
A doua fila pe Config> Ports & Pins este ax Setup. Acest lucru este
folosit pentru a defini modul in care va
ax si de racire este de a fi controlate. Puteti opta pentru a permite Mach3 sa
nu fac nimic cu ea, la randul sau, numai
ax de pe si din afara, sau de a avea control total, de la viteza prin
utilizarea unui Puls Latime modulata (PWM)
semnal sau un pas de semnal si de directie. De dialog este prezentat in figura
5.7. A se vedea Sectiunea 5.5.5, ax
Motor de control de instalare rapida, pentru o descriere.
Figura 5.7: ax fila Configurare a porturilor si Pins Dialog
5.3.6.1 control de racire
Cod M7 se poate intoarce de racire pe Mist, M8 se poate intoarce de inundatii
pe lichid de racire, si M9 pot activa toate racire off. De
De inundatii Mist sectiune de control de dialog care defineste de iesire sunt
semnale pentru a fi utilizate pentru a pune in aplicare
aceste functii. Portul / Pins pentru rezultate au fost deja definite pe Semnale
de iesire
fila.
Daca nu doriti sa utilizati aceasta functie, verifica Dezactivati inundatii /
Mist relee.
5.3.6.2 ax Relay Control
In cazul in care se intinde de viteza este controlata de mana sau prin
utilizarea unui semnal PWM, apoi Mach3 pot defini directia
si, atunci cand a porni si opri-l (ca raspuns
aici. Portul / Pins pentru aceste produse au fost deja definite pe fila Semnale
de iesire.
Daca controlul de ax cu pas si directia, atunci nu aveti nevoie de aceste
controale. M3, M4 si M5
va controla pulsul tren generate in mod automat.
Daca nu doriti sa utilizati aceasta functie, verifica Dezactivati ax relee.
5.3.6.3 Motor Control
Verificati Utilizati ax Motor de iesire, daca doriti sa utilizati PWM sau Pasul
si directia de control al ax.
Atunci cand acest lucru este verificat, atunci puteti alege intre PWM de
control si de Pasul / Motor Dir. Verificarea (sau
cliring) aceasta caseta automat controale (sau sterge) de ax caseta pe Motor
Rezultate fila.
PWM Speed Control
Un semnal PWM este un semnal digital, un 'patrat' val in cazul in
care procentul de momentul in care semnalul este de mare
specifica procentul de viteza maxima, ca autovehiculul ar trebui sa ruleze.
De exemplu, daca aveti un motor si PWM conduce cu viteza maxima cu motor de
3000 rot / min, apoi
de semnal este prezentat in Figura 4.14 ar fi cel cu motor de 3000 x 0,2 = 600
RPM. In mod similar, semnalul
prezentat in Figura 4-13 ar fi ea de la 1500 rpm.
Mach3 are pentru a face un compromis in ce mai multe latimi de puls-l pot
produce fata de cat de sus
o frecventa de unda poate fi patrat. Daca frecventa este de 5 Hz, apoi Mach3
ruleze cu o 25000 Hz
nucleu de viteza poate iesire 5000 viteze diferite. Mutarea in 10Hz reduce la
diferite viteze de 2500,
dar acest lucru inca se ridica la o rezolutie de unul sau doi RPM.
Un val de joasa frecventa patrat creste in momentul in care le va lua pentru a
conduce vehicule cu motor pentru a observa ca un
viteza de schimbare a fost solicitat. Intre 5 si 10 Hz ofera un compromis bun.
Introduceti dorit
frecventa in PWMBase frecv cutie.
Multe unitati de stocare si motoare au o viteza minima. Acesta este de obicei,
pentru ca un motor de racire cu ventilator este foarte
ineficiente, cu un debit mic, chiar daca mare de cuplu si de curent (care
genereaza o multime de caldura), pot fi inca
a cerut. Minima PWM% cutie va permite sa setati procentul de viteza maxima la
care Mach3
vor inceta sa mai scoate in evidenta semnal PWM.
PWM de unitate electronica poate, de asemenea, avea o viteza minima de
stabilire, precum si Mach3 roata de configurare
(a se vedea sectiunea 5.5.5.1) va permite sa setati minim viteze. In mod
normal, ar trebui sa urmareasca pentru a seta scripete
putin mai mare decat limita minima de PWM% sau hardware limita, deoarece astfel
se vor clip de viteza si / sau
da un mesaj de eroare de bun-simt, mai degraba decat sa-l opresc.
Pasul si Directia Motor
Aceasta poate fi o variabila-turatie controlate cu pas impulsuri, sau o unitate
servo.
Aveti posibilitatea de a utiliza Mach3 roata de configurare (a se vedea
sectiunea 5.5.5.1), pentru a defini o viteza minima, daca acest lucru este
nevoie de motor sau sa electronica.
5.3.6.4 Modbus ax de control
Acest bloc permite setarea unui port analogic pe o Modbus aparat (de exemplu, o
Homann ModIO) pentru a controla
ax de viteza. Pentru detalii, consultati documentatia de ModBus aparat.
5.3.6.5 General Parametri
Acestea va permit sa specificati o intarziere dupa inceperea sau oprirea ax
inainte Mach3 va executa mai departe
comenzi (care este, o oprire la timp). Aceste intarzieri pot fi folosite pentru
a permite accelerarea inainte de timp pentru o taietura
se face si, pentru a oferi o protectie de la software-ul merge direct de la
sensul acelor de ceasornic pentru a ceasornic
ax de rotatie. Introduceti locuiesc ori in cateva secunde.
Imediat Relay off inainte de intarziere, in cazul in verificate, va trece de
releu de pe ax, cat mai curand un M5 comanda
este executat. Daca bifat, de ax releu va ramane pe pana la spin-jos perioada
de intarziere a
scurs.
5.3.6.6 roata de raporturi
Mach3 detine controlul asupra vitezei de dvs. ax motor. Ai program ax viteze
prin S
cuvant. De Mach3 scripete sistem va permite sa se defineasca relatia dintre
aceste pentru 15 diferite scripete
sau setarile de cutie de viteze. Este mai usor sa inteleaga cum functioneaza
dupa ce trece prin procesul de tuning
ax de motor, astfel incat raportul roata de configurare este descrisa in
sectiunea 5.5.5.1.
5.3.6.7 speciale Functia
Mod de laser trebuie sa fie intotdeauna cu exceptia bifat pentru controlul
puterea unui taiere cu laser de hrana pentru animale
rata.
Utilizati ax feedback-ul in modul de sincronizare trebuie bifat.
Bucla inchisa ax de control, atunci cand verifica, pune in aplicare un program
servo bucla care incearca sa se potriveasca cu
real ax viteza vazut de Index sau Temporizare senzorul cu care a cerut de catre
S cuvant. Exacte
viteza de ax nu este probabil sa fie critica, astfel ca nu sunt de natura sa
necesitatea de a utiliza aceasta caracteristica.
Daca va face sa-l utilizati, apoi P, I si D variabile ar trebui sa fie
stabilite in intervalul 0 - 1. P controleaza obtine de la
bucla si o valoare excesiva va face ca viteza de vibra, sau de vanatoare, in
jurul a solicitat destul de valoare
solutionare decat pe ea. D variabila se aplica amortizare, pentru a se stabiliza
aceste oscilatii cu ajutorul derivate
(rata de schimbare) din viteza. Am nevoie de variabila pe termen lung, tinand
cont de diferenta dintre
reale si a solicitat acest lucru si creste viteza de precizie in starea de
echilibru. Tuning aceste valori este
asistata prin utilizarea de dialog deschis de Functia cfg's> calibra ax.
Ax Viteza medie, atunci cand verifica, pentru a cauzelor Mach3 medie de timp
intre index / calendarul
impulsuri pe parcursul mai multor revolutii, cand acesta este decurg real ax
viteza. Puteti gasi ca acest lucru este util
cu o foarte mica inertie ax de unitate, sau un control in cazul in care tinde
sa se dea pe termen scurt variatiile de
viteza.
5.3.7 Mill Options '
Rezultatul final, fila pe Config> Ports & Pins este Mill Opþiuni.
A se vedea figura 5.8.
Figura 5.8: Optiuni Mill fila din porturi si Pins Dialog
Z-inhiba.
Z-inhiba Pe caseta permite aceasta functie. Max Adancime Z ofera cea mai mica
valoare a
axa care se va muta. Persistenta validare isi aduce aminte de stat (care poate
fi modificat printr-o
ecran comuta) de la rula pentru a rula de Mach3.
5-14
Digitizarii: de 4 Axa Point Clouds caseta permite inregistrarea de stat a O
axa, precum si X,
Y, si Z. Add Axa scrisori
dosar.
THC Optiuni: Alte optiuni pentru plasma torta control.
Despagubiri G41, G42: Advanced Despagubiri Analiza validare se transforma
intr-o mai aprofundata
uite-i drumul de analiza, care va reduce riscul de gouging cand compensatoare
pentru cutter diametru (folosind
G41 si G42), pe forme complexe.
Homed adevarat atunci cand nu Home comutatoare: Aceasta optiune se va face ca
sistemul pare sa fie referite Home
(adica verde LED-uri) in orice moment. Ar trebui sa fie utilizate numai in
cazul in care nu Home comutatoare sunt definite in conformitate cu
Porturi & PINS> Semnale de intrare fila.
5.3.8 Testarea initiala
Software-ul este acum configurat suficient pentru tine de a face anumite teste
simple cu hardware-ul. In cazul in care se
convenabil pentru a se conecta la intrarile de la manualul de switch-uri, cum
ar fi Home, apoi faceti acest lucru acum.
Run Mach3Mill si afisarea Diagnostice ecran. Acest lucru are o banca de LED-uri
cu modul de manifestare al logicii nivel
de la intrarile si iesirile. Asigurati-va ca extern de urgenta Stop semnal nu
este activ (Red de urgenta
LED-ul nu clipeste), si faceti clic pe butonul rosu Resetare de pe ecran.
LED-ul sau nu se va mai clipeste.
Daca aveti orice iesirile asociate cu lichid de racire sau de ax de rotatie,
atunci puteti utiliza relevante butoane
Diagnostice de pe ecran pentru a activa si dezactiva rezultate. Masina ar
trebui de asemenea sa raspunda, sau ati
poate monitoriza tensiuni de semnale cu o multimeter.
Apoi, opera de origine sau de limita intrerupatoare. Ar trebui sa vedeti
LED-uri corespunzatoare, atunci cand se imbujora galben
lor de semnal este activ.
Aceste teste se va lasa sa vezi ca-ti port paralel se adreseaza in mod corect
si la intrarile si iesirile sunt
conectat corespunzator.
Daca aveti doua porturi si toate sunt semnale de test pe una, apoi s-ar putea
considera un temporara a comuta
dvs. de configurare. Conectati-o din tara de origine sau de a limita trece prin
alt port, astfel incat sa puteti
verifica functionarea corecta. Nu uitati pe butonul Apply, atunci cand fac
acest fel de testare. Daca totul este bine,
atunci puteti restabili buna configurare.
Daca descoperi probleme, sortare-i acum. Acesta va fi mult mai usor decat
atunci cand veti incepe incercarea de a conduce
de axe. Daca nu aveti un multimeter, atunci va trebui sa cumpere sau sa
imprumute o logica sau o sonda D25
Adaptor (reale cu LED-uri) pentru a monitoriza starea de port paralel insigne.
Pe scurt, ai nevoie pentru a determina
daca (a) in semnale si din computer sunt incorecte (de exemplu, Mach3 nu faci
ceea ce iti doresti sau
astepta) sau (b) nu sunt semnale de achiziþie intre D25 conector si
masina dvs. instrument (de exemplu, un cabluri
sau de o problema de configurare cu breakout bord sau masina). Cincisprezece
minute de ajutor de la un prieten
poate lucra minuni in aceasta situatie, chiar daca numai cu atentie pentru a
explica el / ea care-i problema ta
si cum te-au uitat deja de ea. Este uimitor cat de des acest tip de explicatie
opreste brusc
cu cuvinte de genul ' Oh! I a se vedea ce probleme trebuie sa fie, e
'
5.4Defining de instalare Unitati
Cu functii de baza de lucru, este timpul pentru a configura axa unitati. Primul
lucru pentru a
se decide daca doriti sa definiti proprietatile lor in metrice (milimetri) sau
Inch unitati.
Aceasta se face utilizand Config> Selectati Native Unitati de dialog. Acest
lucru este prezentat in figura 5.9.
5-15
Figura 5.9: Selectati Native Unitati Dialog
In calculele
pentru axa de configurare va fi putin mai usor, daca alegeti acelasi sistem ca
dvs.
unitate de tren (de exemplu, ballscrew pitch) a fost facut un surub inch cu 0.2
'plumb (5 tpi) este mai usor sa
configura in inch decat in milimetri. In mod similar, un surub 2mm plumb va fi
mai usor pentru a configura in milimetri.
Altfel, va trebui sa se multiplica sau diviza de 25.4 la conversia de la un
sistem de unitati de la
de alta parte, atunci cand faci axa configuratii. Multiplicarea sau divizia de
25.4 nu este dificil, dar
este doar ceva sa se gandeasca la altceva. Vi se va putea rula programe parte,
utilizand fie unitati, in functie de care
optiune pe care o alegeti aici.
Nu exista, pe de alta parte, un usor avantaj in care au setarea de unitati sa
fie de unitati in care de obicei
munci. In cazul in care unitatile de dumneavoastra sunt de obicei unitate de
lucru, puteti bloca DROs pentru a afisa in acest sistem
orice parte a programului este de a face (de exemplu trecerea de unitati de G20
si G21).
Deci, alegerea este a ta. Utilizati Config> Selectati Native Unitati de a-si
alege milimetri sau inch (a se vedea
Figura 5-9). Odata ce ati facut o alegere, nu se poate schimba fara a merge
inapoi peste toate urmatoarele
pasi sau confuzie totala va domnie! O caseta de mesaj aminteste de acest lucru
atunci cand utilizati Config>
Selectati nativ de unitati.
5.5Tuning Motors
Dupa toate Preliminarii, in sfarsit, puteti incepe setarea de motoare. Aceasta
sectiune descrie infiintarea
va axa unitati si, in cazul in care viteza va fi controlata de catre Mach3, cu
ax de unitate.
Setup pentru fiecare axa necesita trei etape:
1. Se calculeaza cate pas impulsuri trebuie sa fie trimis la unitate pentru
fiecare unitate (inch sau mm) de circulatie
a instrumentului sau de masa. Alegerea pe care ai facut in sectiunea 5.4 care
determina unitati vor fi folosite.
2. Stabilirea viteza maxima pentru motor.
3. Setati necesare accelerare / decelerare rata.
ArtSoft SUA va recomanda sa se ocupe de o axa de la un moment dat. Este posibil
sa doriti sa incercati sa rulati fiecare motor
mecanic inainte de a fi conectat la masina unealta.
Conectati-va de puterea de a axa sofer electronica si verificati de cabluri
intre sofer electronica
si va breakout bord / calculator. Sunteti pe cale sa se amesteca mare putere de
calcul si, de aceea este
mai bine pentru a fi in siguranta mult fum!
5.5.1 Calcularea pasii pe unitate
Mach3 pot efectua in mod automat un test muta pe o axa si calcula pasii de pe
unitate, asa cum este descris
in sectiunea 5.5.2.3, automata de pasi pe unitate, dar care este probabil cel
mai bine la stanga pentru tuning.
Aceasta sectiune ofera o teorie generala si va spune cum sa calculeze valule.
5-16
Mach3 roteste un motor de pasi. Numarul de pasi Mach3 trebuie sa trimita la un
motor de a provoca o 'unitate'
de circulatie (inch sau mm, astfel cum sunt definite in sectiunea 5.4) depinde
de:
1. Mecanice unitate (de exemplu, teren de leadscrew, angrenare intre motor si
surub).
2. Proprietatile de stepper motor sau de codificare pe servo motor.
3. De micro-intarirea sau electronice angrenare in unitate electronica.
Ne vom uita la aceste trei puncte, la randul sau, apoi a le aduce impreuna.
Figura 5.10 arata componente ale unui tipic drivetrain.
Figura 5.10: Machine Drivetrain Componente
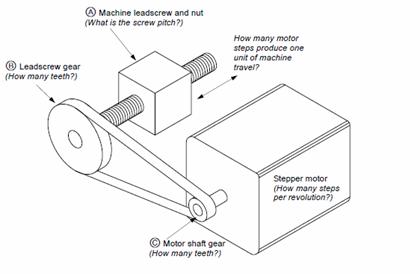
5.5.1.1
Calculare mecanice Drive
Ai nevoie de a calcula numarul de rotatii ale arbore motor (motor revs pe
unitate), necesare pentru
muta axa de o unitate (un inch sau o milimetri). Acest numar va fi probabil mai
mare decat o
de inch si mai putin de o ora de milimetri, dar care nu face nici o diferenta
de calcul.
Pentru un surub si piulita A, trebuie sa stiti teren de surub (care este, in
sirul creasta-la-creasta distanta)
si de numarul de incepe. Inch suruburi sunt, de obicei, specificate in fire de
pe inch (tpi). Teren este
P = 1 ÷ tpi
De exemplu, un teren de 8 tpi singur incepe surub este de 1 ÷ 8 = 0,125 '.
Teren de 16 tpi singlestart
Surub este
P = 1 ÷ 16 = 0,0625 '
Metrice
suruburi sunt specificate de obicei, in termeni de teren, astfel incat nici o
conversie de calcul este necesar. Tu
ar putea avea, de exemplu, un surub de
In cazul in care este un surub multiple incepe sirul, ínmultiti brut pitch cu
numarul de inceput pentru a obtine in mod efectiv
pitch. Eficienta surub smoala este, prin urmare, la distanta de axa se muta
pentru o revolutie a
insuruba. De exemplu, un 16 tpi doua incepe sirul are un efectiv de surub
pitch:
0.0625 'x 2 = 0,125'
Acum puteti calcula surub revs pe unitate:
(surub revs pe unitate) = 1 ÷ (pitch eficient surub)
De exemplu, pentru un singur-8 tpi incepe surub:
(surub revs pe unitate) = 1 ÷ 0.125 = 8 revs / inch
Pentru un teren de
(surub revs pe unitate) = 1 ÷ 2 = 0,5 revs / mm
In cazul in care surub este direct determinata de la motor (1:1 conduce
raportul), atunci acest lucru este, de asemenea, cu motor revs per unitate.
In cazul in care are un motor uneltelor, lant, sau de transmisie prin curele cu
surub Nm cu dintii de pe motor si a uneltelor NS dinti
pe surub uneltele apoi:
(motor revs pe unitate) = (surub revs pe unitate) x NS ÷ Nm
De exemplu, sa presupunem nostru 8 tpi singur incepe surub este conectat la
motor, cu o curea dintata, cu un
48 B dinte scripete pe surub si o roata de dinte
ar fi:
8 x 48 ÷ 16 = 24 motor revs produce masina de
(Sugestie: sa pastrati toate cifrele de pe calculator la fiecare etapa de
calcul, pentru a minimiza erorile de rotunjire.)
Ca o masuratoare exemplu, sa presupunem doua incepe surub are 5 milimetri intre
sirul crestele (adica eficace
teren este de 10 milimetri) si acesta este conectat la motor cu 24 de dinte
roata de pe motor si un put
48 dinte scripete pe surub. Deci, de surub revs pe unitate = 0,1 si revs motor
pe unitate ar fi
0.1 x 48 ÷ 24 = 0,2
Calculul este similar pentru un raft si pinion dintat sau curea sau lant de
unitate.
Gasiti teren de centura dinti lant sau link-uri. De siguranta sunt disponibile
si in metric imperial pitches cu 5
sau 8 milimetri comuna metrice pitches si 0.375 '(3 / 8') comuna de
inch de siguranta si pentru lant. Pentru o
raft, si gaseasca dinte pitch. Acesta este cel mai bun facut de masurare
distanta totala spanning 50 sau chiar 100
decalaje intre dinti. Retineti ca, pentru ca standard de unelte de pescuit sunt
facute la un diametral pitch, lungimea nu va
fie un numar rational, deoarece include constanta π (pi = 3.14159 ).
Daca stiti de diametral pitch dp din raft, puteti calcula dinte pitch TP ca TP
= π / dp.
In cazul in care numarul de dinti pe pinion / sprocket / roata de pe ax
principal care conduce la raft / centura /
lantul este NS apoi:
ax revs pe unitate = 1 ÷ (dinte pitch x NS)
De exemplu, cu un 3 / 8 'si un lant de 13 dinte sprocket pe motor arbore,
atunci motorul revs pe unitate
= 1 ÷ (0.375 x 13) = 0,2051282. In trecere, observam ca aceasta este destul de
'inalt orientate' si de motor
ar putea avea nevoie de o reducere suplimentara de cutie de viteze pentru a
satisface cerintele de cuplu. In acest caz, va multiplica
Motor revs pe unitate de reducere a ratei de cutie de viteze.
motor revs pe unitate = ax revs pe unitate x NS ÷ Nm
5-18
De exemplu, o cutie 10:1 ar da 2.051282 revs per inch.
Pentru axele rotative (de exemplu, mese rotative sau impartirea capete),
unitatea este in grad. Ai nevoie de a calcula
Numarul de autovehicule revs necesar pentru a produce 1 grad de axa de rotatie,
in functie de angrenaj cu melc raportul dintre
rotativ de masa sau impartirea cap. Acest lucru este adesea 90:1 rotativ pentru
tabele si 40:1 pentru impartirea capete (dar verifica
a ta!) Cu un motor conduce direct la o 90:1 vierme, un motor rev ar roti ax 4
grade, deci
Motor revs pe unitate ar fi 0.25. O reducere de 2:1 de la motor la vierme ar da
0.5 revs pe
unitate.
5.5.1.2 Calculare Motor Pasii Per Revolutiei
De baza pentru rezolvarea tuturor moderne stepper motoare este de 200 de pasi
pe revolutie (care este, pe 1.8o pas).
Unele sunt mai vechi steppers pe rev 180 pasi, dar tu nu sunt susceptibile de a
le indeplini, daca sunt sustinute de cumparare
noi sau aproape noi echipamente. Verificati desi a ta, pentru a fi sigur ca
ceea ce aveti.
De baza pentru o rezolutie de servo motor depinde de codificare pe ax.
Rezolutia este de codificare
de obicei, citat in CPR (pe cicluri de revolutie). Pentru ca productia este, de
fapt, doua semnale de quadrature,
rezolutie efectiva va fi patru timp aceasta valoare. Veti vedea o CPR de obicei
in interval de aproximativ
125 - 2000, ceea ce corespunde cu 500 la 8000 pasi pe revolutie.
5.5.1.3 Calculare Mach3 Pasii Per Motor Revolutiei
ArtSoft SUA foarte puternic va recomanda sa utilizati micro-pasit unitate
electronica de stepper
motoare. Daca nu, si de a folosi sau de-o jumatate de pas de unitate, atunci ai
nevoie de mult mai mare de motoare si va
sufera de rezonante ca limita de performanta la unele viteze.
Micro-intensificarea va da fine
operatiune.
Unele micro-drive-au pasit un numar fix de micro-etape (de obicei 10), in timp
ce altele pot fi
configurat. In acest caz, veti gasi 10 de a fi un bun compromis valoare de a
alege. O valoare de 10
micro-Mach3 pasi inseamna ca va avea nevoie pentru a trimite 2000 impulsuri pe
motor ax revolutie pentru un stepper
Axa unitate (presupunand un stepper motor de baza, cu o rezolutie de 200 de
pasi / rev).
Unele servo-drive necesita un puls pe quadrature conta de la motor encoder,
dand astfel 1200
pasi pe rev pentru un encoder 300 CPR. Altele includ electronice capitalului,
in cazul in care va puteti multiplica de
intrare pasi catre un intreg valoare si, uneori, atunci diviza de un alt
rezultat valoarea. De
multiplicare de pasi de intrare pot fi foarte utile cu Mach3 ca viteza de servo
motoare mici cu o
de inalta rezolutie codificare poate fi limitat de puls rata maxima pe care
poate genera Mach3.
5.5.1.4 Mach3 Pasii pe unitate
Acum, ca stim necesare motor revs pe unitate de calatorie, in final, putem
calcula:
Mach3 pasi pe unitate = Mach3 pasi pe rev x Motor revs pe unitate
Figura 5.11 arata de dialog pentru Config> Motor Tuning. Faceti clic pe un
buton de la dreptul de dialog pentru a
selectati axa pe care il configurati, si introduceti calculeaza valoarea Mach3
pasi pe unitate in
Pasii pe caseta de etichetat. Aceasta valoare nu trebuie sa fie un numar
intreg, astfel incat sa puteti obtine la fel de mult de precizie
asa cum doriti. Indiferent de numar, acesta este un specific, calculat numar
stabilit de catre unitatea de configurare.
Nu este o 'tuneable' cantitate. Daca nu te corect masina de
calatorie, atunci cand testarea, te
s-au facut o eroare in calcul. Asigurati-va ca pentru a calcula si a stabilit o
valoare pentru fiecare axa pe care il utilizati,
ca ei nu pot fi la fel.
Pentru a evita uita mai tarziu, faceti clic pe Salvare Axa Setari acum.
5-19
Figura 5.11: Motor Tuning Dialog
5.5.2
Setarea Motor Viteza maxima
Acum a seta viteza maxima cu motor. De configurare> Tuning Motor de dialog
da un grafic de afisare
afisarea de viteza fata de timp si pentru o scurta imaginar muta folosind
curent selectat parametri.
Axa accelereaza, poate conduce cu viteza maxima, apoi decelerates. Aveti
posibilitatea sa faceti clic si glisati Accel si
Viteza glisante, pentru a vedea cum modificari afecteaza performanta. Setati
viteza la maxim de acum. Folosi
de Accelerare glisorul pentru a modifica rata de accelerare / decelerare
(acestea sunt intotdeauna la fel ca in fiecare
altele).
Dupa cum ati utiliza glisante, valorile din Velocity si Accel cutii sunt
actualizate. Viteza este in unitati pe
minut. Accel este in unitati pe second2. Accelerarea valoare este, de asemenea,
prezentate in GS pentru a va oferi o subiectiv
impresie de forte, care va fi aplicat pe un masiv de masa sau de lucru.
Perioada maxima de viteza puteti afisa este limitat de rata de maxim puls
Mach3. De exemplu,
Daca ati configurat acest la 25.000 Hz si 2000 pasi pe unitatea de atunci,
maxim posibil Velocity
este de 750 de unitati pe minut.
Acest lucru este de maxim, cu toate acestea, nu neaparat in conditii de
siguranta pentru motor, mecanismului de antrenare, sau masina. El / ea este
doar Mach3 ruleaza 'din greu.' Puteti sa faceti calculele necesare,
sau a face unele studii practice.
Sectiunea 5.5.2.1 spune cum sa facem studiile. Sectiunea 5.5.2.2 spune cum sa
faci calcule.
5.5.2.1 practice Procesele de Speed Motor
L-ai salvat pe axa dupa stabilirea pasii de pe unitate. Daca nu, faceti acest
lucru acum. Faceti clic pe OK pentru a inchide caseta de dialog,
si asigurati-va ca totul este alimentat sus. Faceti clic pe butonul Resetare
asa sale LED glows continuu.
5-20
Du-te inapoi
aproximativ 20% din viteza maxima. Apasati si tineti cursorul in sus-cheie de
pe tastatura. Masina
Axa ar muta in Plus directie. Daca se misca mai repede decat pare de dorit,
apoi alege o mai mica
viteza. Daca se misca prea incet, apoi alege-o mai mare viteza. Cursorul Down
cheie va face ca
Axa muta in alta parte (de exemplu, minus directie).
In cazul in care axa muta in directia gresita (minus atunci cand aceasta ar
trebui sa se Plus), exista trei modalitati de a remedia
problema. Faceti clic pe butonul Salvare pentru a salva setarile axa, apoi
efectuati una din urmatoarele:
. Modificati Min active setare pentru Dir PIN de axa in Config> porturi si
PINS> Motor Rezultate
tab-ul (si Aplicati-o).
. Verificati invers in caseta de configurare> intoarce acasa / Limite pentru
axa pe care il utilizati.
. Oprire de putere, apoi revers o pereche de conexiuni fizice de a conduce
vehicule cu motor de la
electronica.
In cazul in care un stepper motor hums sau tipetele, atunci trebuie cu fir este
incorect sau au incercat sa-l conduce de mult
prea repede. Reducerea de acceleratie si de viteza. Am vazut mici sisteme care au
avut o viteza maxima
de numai 4 sau
fire (in special, 8 fire de motoare) este uneori foarte confuz. Veti avea
nevoie pentru a se referi la motor si
sofer documentatia electronica.
In cazul in care un servo motor departe ruleaza cu viteza maxima sau flicks si
indica o sa vina pe sofer, iar apoi sa armature (sau
encoder) conexiuni nevoie de mers. (A se vedea documentatia electronica
servo-va pentru mai multe detalii.) Daca
aveti orice probleme aici, veti fi multumit, daca ati urmat sfatul de a cumpara
curent si
sprijinit in mod corespunzator produselor - cumpara dreptul, cumperi o data!
Puls latimea este o alta cauza. Cele mai multe unitati de stocare va lucra bine
cu un minim de 1 microsecunda puls
largime. Daca aveti probleme cu care se muta de test (de exemplu, cu motor pare
prea zgomotos), verificati mai intai ca-ti pas
impulsurile nu sunt ghilimele (de Min activa fiind stabilit incorect pentru
Pasul pe porturi si PINS> Motor
Rezultate fila), atunci s-ar putea sa incerce cresterea puls latime de, sa
zicem, 5 microsecunde. Pas, si
Directia de interfata este foarte simpla, dar, datorita faptului ca poate chiar
'un fel de munca', atunci cand este configurata prost, aceasta poate
vina de a fi dificil de gasit, fara a fi foarte sistematica si / sau de uitat
la impulsuri, cu un osciloscop.
5.5.2.2 Motor viteza maxima Calculele
Procesele abordare descris in Sectiunea 5.5.2.1 este susceptibil de a fi cel
mai simplu mod de a stabili cu motor de viteza,
dar daca vrei sa calculeze viteza maxima motor aceasta sectiune descrie ce
trebuie sa ia in considerare.
Exista multe lucruri care definesc viteza maxima de o axa:
1. Maxima permisa de viteza a autovehiculelor (probabil 4000 rot / min pentru
servo sau 1000 rot / min pentru stepper).
2. Viteza maxima permisa de ballscrew (depinde de lungimea, diametrul, cum sa
capete sunt acceptate).
3. Viteza maxima de transmisie prin curele sau reducere de cutie de viteze.
4. Viteza maxima care conduce Electronics va sustine fara semnalizare un
defect.
5. Viteza maxima de a mentine ungere de masina diapozitive.
Primele doua in aceasta lista este cel mai probabil sa va afecteze. Veti avea
nevoie pentru a se referi la producatori 'caietului de sarcini,
calcula permite viteze de surub si cu motor, si se refera la aceste unitati pe
secunda, a
axa de circulatie. Setati aceasta valoare maxima in cutie de viteza cu motor
Tuning pentru axa implicate.
Mach1/Mach2 de Yahoo! forum on-line este un loc util pentru a primi sfaturi de
la alti utilizatori Mach3, la nivel mondial,
cu privire la acest fel de subiect. Vezi www.machsupport.com pentru un link.
5-21
5.5.2.3 automata de pasi pe unitatea de
Sectiunea 5.5.1, calculat pasii pe unitate, explica modul de a calcula pasii pe
unitate, dar s-ar putea sa
nu trebuie sa fie capabil sa masoare angrenaj de axa conduce vehicule sau de a
sti exact pitch a unui surub. Cu conditia sa
poate masura cu precizie distanta mutat de o axa, cu toate acestea, probabil,
cu ajutorul unui test de apelare indicator si
Gage blocuri, apoi Mach3 poate calcula pasii de pe unitatea de care ar trebui
sa fie configurat. Pentru cele mai bune rezultate,
trebuie sa obtineti o valoare de aproximativ corect de calcul, chiar daca
trebuie sa ghicesc la unele valori,
inainte de efectuarea automata setup.
Selectati fila Setari Alt6 in principal Mach3 CNC Controller fereastra, asa cum
se arata in Figura 5.12.
Figura 5.12: Setari Alt6 Tab
Figura 5.13
arata Setare Pasii pe unitate buton pe Setari Alt6 ecran pentru a initia
automat
setarile de proces. Vi se va cere pentru axa pe care doriti sa il calibreze.
Selectati o axa pe
Alegeti Axei pentru a calibra meniul de tip pop-up si faceti clic pe OK.
Figura 5.13: Setarea Automat de pasi pe unitatea de
Un alt meniu
de tip pop-up, prezentat in Figura 5.14, va cere sa introduceti un nominala
muta la distanta. Mach3 va
face aceasta mutare, pe baza acestuia setarile curente, care, desigur, poate fi
wildly incorecte. Fii gata sa
apasati pe butonul opri daca masina pare pe cale de a de avarie, pentru ca va
setarile existente sunt prea departe
de pe.
Figura 5.14: Fereastra de a intra nominala Mutare la distanta
In cele din
urma, dupa ce a muta, vi se va cere pentru a masura si intra exact distanta,
care a fost mutat,
dupa cum se arata in Figura 5.15. Aceasta va fi utilizata pentru a calcula
valoarea reala a Pasii pe unitate de masina dvs. axa.
Sectiunea 5.5.4 pentru a descrie modul in masura axa de calatorie.
Figura 5.15: Fereastra de a intra efectiv Mutare la distanta
5.5.3
Alegerea o accelerare Valoare
5.5.3.1 inertie si a fortelor
Nr motor este capabil de a schimba viteza de un mecanism instantaneu. Un cuplu
este necesar pentru a da unghiular
impuls la rotirea parti (inclusiv motorul propriu-zis), de cuplu si
transformate in vigoare pana la
mecanism (surub si piulita, etc) are scopul de a accelera masina de piese si
instrumentul sau de lucru. Unele dintre
in vigoare de asemenea, se duce la depasirea frecare si, bineinteles, pentru a
face instrument taiat.
Mach3 va accelera (si viteza) cu motor de la un anumit rata (de exemplu, o
linie dreapta de viteza in timp curba).
In cazul in care autovehiculele pot oferi mai mult de cuplu decat este necesar
pentru taiere, frecare, fortele de inertie si pentru a fi
prevazute la rata specificata acceleratie, atunci totul este bine. In cazul in
care cuplul nu este suficienta, atunci cu motor
va pierde sau se bloca pasi (in cazul in care un stepper), sau de servo pozitia
eroare va creste (in cazul in care un servo). In cazul in care servo
eroare este prea mare, atunci va conduce, probabil, un semnal de vina conditie,
dar, chiar daca nu a
precizie de taiere va avea de suferit. Acest lucru va fi explicat in detaliu
mai scurt timp.
5-23
5.5.3.2 Testarea diferite de Accelerare Valori
Incercati sa pornesc si opresc masina dvs. cu setari diferite de Accelerare
glisanta in Motor
Tuning de dialog. La mica accelerare (panta dulce pe grafic), va fi capabil sa
aud de viteza
ramping in sus si in jos.
5.5.3.3 De ce vrei pentru a evita un Big Servo Eroare
Cele mai multe miscari facute intr-o parte de program sunt coordonate cu doua,
sau mai mult, axe se deplaseaza impreuna. Astfel, in
o miscare de la (X = 0, Y = 0) la (X = 2, Y = 1), Mach3 se va muta de la axa X
de doua ori viteza de axa Y.
Este nu numai coordoneaza miscarile la viteza constanta, dar asigura, de
asemenea, faptul ca viteza ceruta-relatie
se aplica in timpul de accelerare si decelerare prin accelerarea toate Propuneri
la o viteza determinata
de 'mai lent' axa.
Daca specificati o acceleratie pentru un anumit axei mai mare decat ceea ce a
masinii poate livra, Mach3 va
presupune, totusi, se poate folosi ca valoare. Daca, in practica, axa miscare
GAL-uri in spatele ceea ce este poruncit
(de exemplu, servo de eroare este mare), apoi a taiat calea in lucru va fi
inexacte.
5.5.3.4 Alegerea o accelerare Valoare
Este posibil, stiind toate masele de piese, momente de inertie al motorului si
suruburi, frecare
fortelor, precum si de cuplu disponibil de la motor, pentru a calcula ce
acceleratie poate fi realizat cu un
dat eroare. Ballscrew si liniar slide producatorilor cataloage includ adesea
esantion calcule.
Cu exceptia cazului in care trebuie sa aveti in final de performanta de la
masina dvs., cu toate acestea, Statele Unite ale Americii ArtSoft recomanda
pur si simplu de stabilire a valorii de acceleratie astfel incat test porneste
si opreste sunetul 'confortabil'. Acest lucru ar putea
nu trebuie sa fie foarte stiintific, dar este de obicei, da rezultate bune.
Este, de asemenea, mult mai usor decat a face toate calculele.
5.5.4 Salvarea si Testare Axei
In cele din urma, nu uitati sa faceti clic pe Salvare pentru a salva Axa Setari
accelerarea ratei inainte sa se mute.
Acum ar trebui sa va verificati calcule folosind manualul de date de intrare
(MDI) pentru a face o definite G0
circulatie si de verificare a rezultatelor. Pentru o stare bruta verifica
puteti utiliza un otel regula. O mai precisa, de test poate fi
face cu o linie de testare Indicator (DTI) si un instrument de masura bloc.
Strict, DTI ar trebui sa fie montat in
toolholder, dar pentru o moara conventionale pe care le puteti utiliza in
cadrul masinii ca ax nu
mutare relativ la cadru, in X-Y avion.
Sa presupunem ca sunt testare a axei X si sa aiba un 4 'Gage bloc.
Selectati MDI ecran (Figura 5-16).
Figura 5.16: Selectarea MDI

Faceti clic
in caseta de intrare (figura 5.17) si introduce comenzi (G20 G90) pentru a
selecta unitatile de inch si absoluta
coordonate.
5-24
Figura 5.17: Introducerea manuala a G20 G90 Comenzi

Crearea unui
scoaba de la masa cu ei suprafata perpendiculara pe masa si la masa de
calatorie. Jog de
Axa atat DTI sonda atinge-o. (A se vedea punctul 3.2, jogging, pentru informatii
despre jog control butoane
jog si modul de setari.) Asigurati-va ca termina printr-o miscare in minus X
directie.
Rotiti DTI bezel la zero de lectura. Acest lucru este ilustrat in Figura 5.18.
Figura 5.18: Stabilirea unui Zero Pozitia
Folosind
Mach3 MDI ecran, faceti clic pe butonul X zero la zero a axei X DRO.
Mutare in tabelul de
rezulta diferenta dintre bloc si DTI ar trebui sa fie jur de 4,5 '. Daca
nu, atunci e ceva
grav in neregula cu dumneavoastra calculele cu privire la masurile pe unitatea
de valoare. Verifica si de a corecta acest lucru.
Setati Gage bloc impotriva opri bloc de pe masa (amintesc ca, in acest exemplu,
noi suntem o presupunand 4 '
bloc) si pentru a trece
a fost de jog la zero DTI impotriva bloc, astfel incat efectele backlash in
mecanismul vor fi eliminate.
De lectura,
tol sau cam asa ceva. Figura 5.19 arata Gage bloc in pozitie.
90 °
5-25
Figura 5.19: Gage Bloc in Pozitia
Scoateti
Gage bloc si emite comanda G0 x0 pentru a muta inapoi si verifica valoarea
zero. Repetati
de 4 'incercare de a obtine un set de 20 de test, probabil, de valori.
Vezi cum reproductibile de pozitionare este. Daca v-ati mare
variatii, atunci exista ceva in neregula mecanic. Daca primiti o eroare, atunci
poti sa-l bine
tune pasii pe unitatea de valoare cu ajutorul tehnicii descrise in sectiunea
5.5.2.3 a atinge maxim
precizie.
Apoi, ar trebui sa verificati ca axa nu pierde pasi in repetate se muta la
viteza. Scoateti Gage
bloc. Utilizati MDI ecran pentru a elibera G0 x0 comanda, control si de zero pe
DTI.
Faceti clic pe butonul Start Invatati. Faceti clic in spatiul de intrare, de
tip si in urmatorul program:
F1000 (adica mult mai rapid posibil, dar Mach3 va limita de viteza)
G20 G90 (Inch si absolute)
M98 P1234 L50 (rula subroutine de 50 de ori)
M30 (stop)
O1234
G1 X4
G1 x0 (a face o alimentare rata muta si muta inapoi)
M99 (retur)
Comenzile vor fi executate pe masura ce tastati ei, dar acestea vor fi, de
asemenea, salvate. Dupa ce ati scris in
toate comenzile de program, faceti clic pe butonul Stop Invatati. Faceti clic
pe Incarcati / Editare buton. Selectati programul de
Run fila. Faceti clic pe butonul Start Cycle a rula programul. Verificati daca
motiunea de sunete
neted.
Cand se termina, DTI, desigur, ar trebui sa cititi zero. Daca nu, sa adapteze
viteza maxima si
acceleratie de axa (in jos!) si incercati din nou.
Daca programul nu se executa corect, verificati pentru a fi sigur ca nu ati
facut o eroare de typing. Aveti posibilitatea sa editati
program, facand clic pe butonul Editare GCode cu privire la programul de
Executare fila.
Repetati 5.5.4.1 Configurarea Alte axelor
Cu experienta acumulata va trebui configurat prima axa, ar trebui sa fie
capabile sa rapid
repetati procesul pentru celelalte axe.
5-26
5.5.5 ax Motor Speed Control Setup
In cazul in care viteza de ax motor este fix sau controlate manual, atunci
puteti ignora aceasta sectiune. In cazul in care
motor este pornit si in afara acestuia, in ambele sensuri, de Mach3, care apoi
vor fi fost infiintate cu
Releu rezultate.
Daca Mach3 este pentru a controla viteza ax, fie de un servo unitatea care
accepta Pasul si Directia de impulsuri,
sau de catre un Puls Latime modulata (PWM) motor controller, apoi aceasta
sectiune va spune cum sa configurati
sistemul dumneavoastra.
5.5.5.1 Motor Speed, ax Speed, si Pulleys
Pasul si Directia PWM cat si a va permite de a controla viteza de la motor.
Cand sunt prelucrari mecanice,
ceea ce se intinde de viteza si de comanda (S-cuvant) in program sunt parte in
cauza este cu
viteza de ax. Motorul si ax viteze sunt, desigur, legate de pulleys sau unelte
de pescuit
conectarea acestora. Aceasta sectiune explica modul de a defini cu motor / ax
relatie cu Mach3.
Noi folosim termenul de 'roata' pentru a acoperi atat scripete si
uneltele de unitate in acest manual. Figura 5.20 arata un pas
roata de sistem.
Figura 5.20: Pasul Pulleys
Mach3 nu
poate sti, fara a fi ce-a spus roata de raport este selectat la un moment dat
atat de tine, de
masina de operator, sunt responsabile pentru furnizarea de informatii care sa
Mach3. Informatia este dat
in doua etape. Cand sistemul este configurat (adica ceea ce faci acum), va
defini pana la cincisprezece
disponibil roata de combinatii. Acestea sunt stabilite de dimensiunile fizice
ale pulleys sau de raporturile in
orientate in cap. Apoi, in momentul in care o parte de program este de a fi
difuzate, operatorul specifica care troliu (1 la 15) este in
folosi.
Masina de roata de raporturi sunt definite
5.21 arata un exemplu de fereastra de dialog. De dialog va permite sa
defineasca pana la cincisprezece roata de seturi.
5-27
Figura 5.21: Config> ax Pulleys Dialog
Viteza
maxima (Max Speed) este viteza cu care se intinde in cazul in care se vor roti
cu motor este cel
viteza maxima. Viteza maxima este realizat de catre 100% in latime puls PWM si
de
'Ax Axa' pentru Pasul si directie. In cazul in care o viteza mai mare
decat Max Speed este solicitat, Mach3
va afisa un avertisment si pentru a folosi Max Speed valoare.
In cazul in care Min Speed caracteristica este utilizata, valoarea sa pentru
fiecare roata de ar trebui sa fie calculata ca procent din
viteza maxima, cu procentul stabilit de catre o viteza minima de rating de la
motor sau controler.
Este, desigur, de asemenea, procentul minim de semnal PWM raportul. De exemplu,
daca un PWM de mai putin
mult de 20% da inacceptabil motor de performanta, atunci o viteza minima ar
trebui sa fie calculata ca
20% din viteza maxima. In cazul in care o viteza mai mica decat cea minima este
solicitat (de
Mach3 va afisa un avertisment si pentru a folosi minim acceptabil de viteza. De
exemplu, in cazul in care exista un maxim
viteza de 1600 rot / min la scripete 4 si o viteza minima de 320 (20% din
1600), o comanda S200
va afisa un avertisment si o viteza minima de 320 ar putea fi utilizate.
Aceasta facilitate este pentru a evita de operare
motorul sau de controlor de mai jos, la o viteza minima de rating sale. Daca nu
doriti sa infiinteze in
Min Viteza caracteristica, introduceti o valoare de la 0 pentru fiecare roata
de Viteza Min.
Mach3 foloseste de roata de raportul de informatii, dupa cum urmeaza:
1. In cazul in care o parte de program executa S-un cuvant sau o valoare este
introdusa in Setare Viteza DRO, atunci
valoarea se compara cu viteza maxima de curent selectat roata. In cazul in care
a solicitat
viteza este mai mare decat valoarea maxima, atunci se produce o eroare.
2. In caz contrar, procentul maxim de camion care a fost solicitata este
folosit pentru a seta
PWM puls latime, sau Pasul impulsuri sunt generate pentru a produce acest
procent de maxim motor
de viteza, in conformitate cu motor in Tuning pentru 'ax Axei'.
De exemplu, sa presupunem ax viteza maxima de scripete # 1 este de 1500 rot /
min. S1600-ar fi o eroare.
S600-ar da un impuls PWM latime de 40% (600/1500). In cazul in care maxim Pasul
si Directia de viteza este
3600 rot / min, apoi motorul ar fi 'calcat' de la 1440 rot / min
(3600 x 0,4).
Raportul valoare poate fi stabilit in cazul in care viteza reala de la ax,
indiferent de motiv, este diferit de cel de viteza
fiind vazut de ax de viteza. Aceasta se poate intampla in cazul in care, din
cauza constrangerilor fizice, viteza
Senzorul trebuie sa fie montat la un punct in ax drivetrain ca suplimentare a
capitalului intre ei locatie
si de iesire ax.
Verificati invers in cazul in care, din cauza orientarii, ax de rotatie a unui
camion setare este opusa de rotatie a
roata de alte setari.
Ca un exemplu, luati in considerare Bridgeport ® Seria 1 pas scripete J cap.
Acesta ofera un total de opt viteze
printr-o de patru etape si o roata de doua viteze interne de reducere a
vitezei. Pentru ca de proiectare a J cap,
singurul loc rezonabil pentru a monta un ax de viteza este pe ax roata. In
cazul in care echipamentul
reducere este folosit in 'ridicat' de pozitie, acest lucru nu
provoaca dificultati. Raportul dintre ax roata de
5-28
de viteza si de viteza reala ax este 1:1. Viteza vazut de viteza pe ax roata va
este egal cu viteza de ax.
In cazul in care echipamentul este setat la reducerea sale 'Low'
pozitie, cu toate acestea, doua lucruri se intampla. Unu, viteza de vazut
de viteza va fi de aproximativ 8-3 ori valoarea reala a vitezei de la ax,
pentru ca de ax
viteza va fi redusa cu uneltele de reducere. Doua, in cazul in care se executa
cu motor transmite, de ax va
randul sau, in sens invers, din cauza interpune uneltele reducere. Aceste
discrepante pot obtine despagubiri pentru
in mod corespunzator de catre Mach3 configurarea roata de intrari care sa
corespunda larga de viteza redusa. Aseza
raportul care urmeaza sa fie egal cu cel de reducere a vitezei. Mach3 va
ímparti viteza vazut de viteza de
Raportul si afisa corect ax viteza. De asemenea, verificati de
'invers' cutie, asa ca va Mach3 interbancare
notiunea de 'inainte' si 'revers' pentru cei scripete pasi.
Tabelul 5-3 liste corespunzatoare settings.1
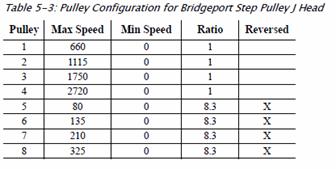
Min Viteza
valorile nu sunt prezentate in tabelul 5.3, deoarece acestea vor depinde de
caracteristici de functionare
special de motor si conducator auto. (A Min Viteza de 0 va intotdeauna locul de
munca, dar nu veti primi de supraincarcare
protectia oferita de un configurat corect Viteza Min.)
5.5.5.2 Puls Latime modulata ax Controller
Pentru a configura ax motor pentru PWM de control, verifica Utilizaþi ax
Motor de iesire si PWM de control
cutii pe Config> Port si PINS> ax fila Configurare (Figura 5.7).
Localizati PWMBase frecv cutie. Valoarea pe care le introduceti aici este
frecventa de squarewave ale caror
puls latimea este modulata. Acesta este un semnal care apare pe ax Pasul PIN.
Cu cat este mai mare frecventa
pe care o alegeti aici, cu atat mai rapid controllerul tau va fi in stare sa
raspunda la modificari de viteza, dar
mai mic de 'rezolutie' a ales viteze. Numarul de diferite viteze este
motorul puls frecventa
impartit
Hz, exista 700 discret viteze disponibile. Acesta este aproape sigur suficiente
cu privire la orice sistem real, ca o
motor cu viteza maxima de 3600 rot / min ar putea, teoretic, sa fie controlate
in pasi de mai putin de 6 rot / min.
Introduceti procentul minim acceptabil in semnal PWM de minim PWM cutie. Se
refera la distribuitorul de
documentatia produsului pentru a se ghida.
Definiti o productie de aderenta pe Motor Rezultate fila (Figura 5.5) pentru ax
Pasul. Acest PIN trebuie sa fie
conectat la motor PWM de control electronica. Nu aveti nevoie de un ax pentru
Directia, asa set
acest PIN la 0.
5.6.1.1
Viteze corelarea si Directia
Viteza de intrare% este folosit pentru a evita crashing in stop de o axa de la
viteza maxima, atunci cand cauta in
referinta trece. Mach3 se va muta de la axa procentul de viteza maxima pe care
o introduceti aici.
Home neg intrare determina directia initiala de cautare. Cand vi se coreleze,
Mach3 nu are nici o
Ideea de pozitia de o axa. In directia aceasta depinde de miscarile Home neg
setare. In cazul in care relevante
este bifata caseta, apoi se va muta axa in minus directie, pana
Prima pagina de intrare este deja activ, apoi se va muta axa in plus directie.
In mod similar, in cazul in care caseta este
bifat, apoi axa muta in plus directie, pana la intrare este activa sau in minus
de directie in cazul in care acesta
este deja activ.
5.6.1.2 Pozitia Home Switch-uri
In cazul in care caseta de Auto Zero este verificata, atunci axa DROs va fi
stabilit de referinta / Home Switch
locatie valori definite in Home Dezactivat. (offset) coloana (mai degraba decat
reale de zero). Acest lucru poate fi util
se intoarce acasa, pentru a minimiza timpul pe-o foarte mare si lent axa.
Este, desigur, este necesar de a avea limita separate si switch-uri de
referinta in cazul in care trece de referinta nu este la
la sfarsitul anului o axa.
5.6.1.3 Configurati Soft Limite
Cele mai multe implementari de limita intrerupatoare implica anumite
compromisuri. Apasand le va accidental
necesita interventie de catre operator si pot cere sistemului sa fi resetate si
re-difuzare. Soft limitele
pot oferi o protectie impotriva acestui tip de incomod accident.
Software-ul va refuza, pentru a permite axe pentru a va deplasa in afara
declarat al moale limitele de
X, Y si Z axe. Acestea pot fi stabilite in intervalul -999999 la + 999999 de unitati
pentru fiecare axa. Cand jogging
miscare devine aproape de limita, atunci ei vor fi de viteza redusa, atunci
cand in interiorul unui Slow Zona care este definita
pentru masa.
5-31
In cazul in care Slow Zona este prea mare, atunci va reduce zona de lucru a
masinii. Daca acestea sunt
da prea mic, atunci te lovesc risc de hardware limitele.
Definite limitele se aplica doar atunci cand au trecut cu privire la utilizarea
de Soft Limitele butonul comutare - a se vedea limitele si
Diverse control de familie pentru a afla detalii.
In cazul in care o parte program incearca sa se mute dincolo de o limita de
moale, apoi se va ridica o eroare.
Soft limitele valorilor sunt, de asemenea, folosit pentru a defini taiere plic
daca masina este selectat pentru toolpath
prezenta. Puteti gasi le utile pentru aceasta, chiar daca nu sunt preocupati de
limitele reale.
5.6.1.4 G28 Home Pozitie
G28 de coordonatele defini pozitia in valoare absoluta, coordonatele la care se
va muta axe in momentul in care o
G28 este executat. Ele sunt interpretate in actuala unitati (G20/G21) si
ajustata, daca nu in mod automat
de unitati de sistem este schimbat.
5.6.2 Configurarea Sistemului Hotkeys
Mach3 are un set de la nivel global hotkeys care pot fi utilizate pentru
jogging sau pentru a introduce valorile in MDI linie etc
Aceste chei sunt configurate in Config> System Hotkeys dialog este prezentat
in Figura 5.23. Click pe
buton pentru functia necesar, apoi apasati tasta pentru a fi folosit ca sa
hotkey. Valoarea acesteia va fi afisata
pe de dialog. Aveti grija pentru a evita duplicarea utilizarea unui cod, astfel
cum a fost ca poate provoca grave confuzii.
Acest dialog va permite sa definiti de asemenea, codurile de externe butoane
folosite ca OEM Declansarile.
Figura 5.23: Configurarea Sistemului Hotkeys Dialog
Tabelul 5-4 enumera defaults utilizate pentru Jog hotkeys.
Tabelul 5.4: Valori prestabilite pentru Jog Hotkeys
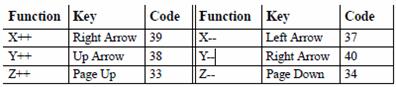
5.6.3
Configurarea Backlash
De configurare> Backlash dialog este prezentat in Figura 5.24 va permite sa
va ofere o estimare de la distanta a
Axa trebuie sa creati o copie de rezerva pentru a asigura orice backlash este
luata pana cand final 'transmite' circulatie se face. Tu
poate, de asemenea, specifica viteza cu care aceasta circulatie este acela de a
fi facute.
Mach3 va incerca sa compenseze backlash axa in unitatea de mecanisme de a
incerca sa se apropie
fiecare necesar coordona de la aceeasi directie. In timp ce acest lucru este
util in aplicatii cum ar fi foraj sau de
plictisitor, nu poate depasi problemele cu masina in continua taiere in cazul
in care schimbari in directia
apara. De asemenea, retineti:
. Aceste setari sunt folosite doar atunci cand este activata backlash
compensare de pe caseta de selectare.
. Luati in considerare backlash compensare ca o 'ultima solutie' in
cazul in care mecanice de proiectare a masina dvs.
nu poate fi imbunatatita. Folosind aceasta va dezactiva general de 'viteza
constanta' caracteristici la colturi.
. Mach3 nu este pe deplin capabil sa onoare axa acceleratie atunci cand
parametrii compensatoare pentru backlash,
atat de stepper sistemelor in general, va trebui sa fie detuned, pentru a evita
riscul de a pierde pasi.
Figura 5.24: Configurarea Backlash Dialog

5.6.4
Configurarea Slaving
Mari, cum ar fi masini de brat articulat routere sau mori adesea nevoie de doua
unitati de stocare, una pe fiecare parte a brat articulat
in sine. In cazul in care aceste deveni din pas de brat articulat va
'raft', si axa transversala nu trebuie sa fie perpendiculara pe
Axa lung.
Aveti posibilitatea de a utiliza Config> Slave Axa de dialog este prezentat
in Figura 5.25 pentru a configura Mach3 deci o unitate (sa zicem
pe axa X) este principala unitate si un alt sclav la ea (probabil C configurat
ca axa liniara, mai degraba decat
rotativ). In timpul utilizarii normale, acelasi numar de impulsuri pas va fi
trimis la master si slave axe
cu viteza si acceleratie fiind determinata de 'mai incet' din cele
doua.
In cazul in care o operatiune de referinta este solicitata, acestea vor muta
impreuna, pana la domiciliu este un comutator de
detectat. Aceasta unitate va pozitie de pe care tocmai trece in mod obisnuit,
dar de alta axa va continua
pana la trecerea este detectat, apoi asezat pe el. Astfel, pereche de axe va fi
'patrat in sus' la
home trece pozitii, precum si orice tiraj, care a intervenit fi eliminate.
Figura 5.25: Configurarea Slave Axei Dialog
Desi Mach3
tine de master si slave axe in pas, DRO de sclav axa nu va afisa
compensa aplicate de catre Instrumentul de masa, etc dispozitiv compensa
valorile sale putand fi confuz pentru a operatorului.
ArtSoft SUA, prin urmare, recomandam sa folositi Designer ecran pentru a
elimina sclav axa DRO
legate de control si de la toate ecranele cu exceptia Diagnostice. Salvare ca
noul design cu un alt nume
decat cea implicita, si de a folosi View> Load Ecrane de meniu pentru a
incarca o in Mach3.
5.6.5 Configurarea Toolpath
De configurare> ToolPath dialog este prezentat in Figura 5.26 va permite sa
va pentru a defini modul in care este afisat toolpath.
5-34
Figura 5.26: Configurarea Toolpath Dialog
Originea
sfera, atunci cand verifica, afiseaza un cerc umplut de la punctul de a afisa
toolpath reprezentand
X = 0, Y = 0, Z = 0
3D Compass, atunci cand verifica, arata sagetile ilustrand directii de pozitiv
X, Y, Z si in toolpath
prezenta.
Machine granitelor, atunci cand verifica, afiseaza o caseta de setarile
corespunzatoare de moale limitele
(indiferent daca sunt sau nu pornit).
Instrumentul de pozitie, cand verificate, arata pozitia curenta a unui
instrument de pe ecran.
Jog Urmati Mode, atunci cand verifica, cauze de linii reprezentand toolpath
pentru a va deplasa in raport cu
fereastra ca instrument este jogged. Cu alte cuvinte, instrumentul este fixat
in pozitia de toolpath afisa fereastra.
ShowTool ca mai sus centerline, la randul sau, se refera
Arata strung Obiectul permite reprezentarile 3D a obiectului, care vor fi
produse de toolpath
(Mach3Turn numai).
Culori pentru diferite elemente de pe ecran poate fi configurat. Luminozitatea
fiecare a aditivului
primar culorile rosu, verde si albastru sunt stabilite pe o scala de la 0 la 1,
pentru fiecare tip de linie. Sugestie: Folositi un program
cum ar fi Photoshop pentru a face o culoare va place si de impartire sale RGB
valori de 255 (foloseste scara 0
la 255) pentru a obtine valori pentru Mach3.
A-axa valorilor va permit sa specificati pozitia si orientarea de
si pe ecran este activat de rotatii O caseta.
Resetare avion pe Regen reverts de afisare a toolpath afisa la curent avion,
ori de cate ori este
regenerate (prin dublu clic sau faceti clic pe buton).
Cutie Grafic afiseaza o caseta de la granitele de instrument de circulatie.
5-35
5.6.6 General Configuration
De configurare> General configurare dialog este prezentat in Figura 5.27
va permite sa definiti moduri care sunt active
atunci cand este incarcat Mach3 (de exemplu, starea initiala a sistemului).
Intrarile sunt descrise de coloana
coloana.
Figura 5.27: General Configuration Dialog

5.6.6.1
General Configuration Logic, Coloana 1
G20/G21 control: Daca Blocare DROs pentru instalarea de unitati este
verificate, apoi, chiar daca G20 si G21 va modifica
modul in care X, Y, Z etc cuvinte sunt interpretate (inch sau milimetri), a
DROs intotdeauna va afisa in
Setup Unitatea de sistem.
Instrumentul de schimbare: Daca Ignore Change Instrumentul este verificat, M6
instrument schimba cereri vor fi ignorate. Daca
bifat, M6 va apela
Daca Stop ax, asteapta pentru Ciclul de incepere este verificat, un instrument
de schimbare M6 cererea va opri si ax
asteptati manual pentru a reporni.
Daca Auto Instrumentul Schimbator este verificata, atunci M6Start/M6End
macro-uri se va numi.
Unghiular proprietati: O axa verificate ca unghiulara se masoara in grade (care
este de a spune nu G20/G21
nu modifice interpretarea A, B, C de cuvinte). Daca A, B, C sau nu este bifat,
ca axa va fi masurata in
liniar de unitati similare cu X, Y, si Z.
Programul final sau M30 sau inapoi: Defineste actiune (e) de a avea loc la
sfarsitul anului sau inapoi o parte din program.
Verificati functiile necesare. Atentie: Inainte de control pentru a elimina
elementele compensa si de a efectua
G92.1, ar trebui sa fie absolut clar modul in care aceste caracteristici de
lucru sau le-ati putea gasi ca actuala pozitie
are coordonate foarte diferit de ceea ce va asteptati de la sfarsitul unui
program.
5-36
M01 control: Daca Stop pe M1 Command este verificat, de programul optional opri
comanda M1 va fi
activat.
Serial de iesire: Defineste portul COM numarul urmeaza sa fie utilizate pentru
productia de serie de canal si rata baud
la care ar trebui sa iesire. Acest port poate fi scris de
functii speciale de o masina (de exemplu, LCD display, instrument-changers, axa
cleme, swarf transportoare etc.)
Programul de siguranta: Cand verificate, permite Input # 1, ca de siguranta
acoperi imbuca.
5.6.6.2 General Configuration Logic, Coloana 2
Editor: Specifica numele fisierului executabil din editor pentru a fi numit de
catre GCode edita buton.
Butonul 'Rasfoire' va permite sa selectati un fisier adecvat (de
exemplu, C: windows notepad.exe).
Startup Modals: initializarea String: Specifica un set de GCodes valide pentru
a seta starea initiala a Mach3
atunci cand este pornit. Acestea sunt aplicate dupa valorile stabilite de catre
Motion Mode, la distanta Mode, IJ Mode,
si active avion de miscare (a se vedea mai jos) astfel pot trece peste ele.
Utilizati modul selections oriunde
posibil pentru a evita confuzia. Daca Utilizarea de initializare pe ALL
'Reseteaza' este verificata, atunci aceste coduri vor fi aplicate
indiferent de modul in care este Mach3 reset - de exemplu, dupa o impiedica de
conditie.
Propunere mode: Constant Velocity seturi G64, G61 exacta Stop seturi.
Mod de la distanta: absolute seturi G90, G91 seturi Inc. Absoluta este de
obicei de 'normal' sau conventionale
Mod. Utilizati cu precautie, daca va schimbati-l la incrementala. Dupa ce a
gresit modul selectat in raport cu ceea ce
va GCode program utilizeaza poate face toolpath uita foarte ciudat.
I / J Mod: Aveti posibilitatea sa setati la interpretarea sa fie introduse pe I
& J in arc miscarile. Acest lucru este prevazut de compatibilitate
cu diferite CAM post-procesoare pentru a incerca si alte controlere de masina.
In Inc IJ
Mod, I si J (centrul punct), astfel cum sunt interpretate in raport cu punctul
de plecare pentru un centru format arc.
Acest lucru este compatibil cu NIST EMC. In mod absolut IJ, I si J sunt
coordonate de la centru in
actual sistem de coordonate (de exemplu, dupa aplicarea de lucru, instrument si
G92 compensa). Daca cercurile intotdeauna
nu pentru a afisa sau pentru a reduce in mod corespunzator (in special, evident
de catre acestia fiind prea mari, daca acestea sunt departe de origine),
Mod de IJ atunci nu este compatibil cu programul de partea ta. O eroare in
aceasta setare este cel mai
frecventa cauza de intrebari din partea utilizatorilor atunci cand au incercat
sa taie cercuri.
Active avion: XY seturi G17, YZ seturi G19, G18 seturi XZ.
Jog incremente in Cycle Mode: ciclul butonul Jog Pasul succesiv va incarca
valorile de la acest
lista in Pasul DRO. Acest lucru este adesea mai convenabil decat sa tastati o
valoare in Pasul DRO. Introduceti
speciale valoarea 999 pentru a comuta
scop, acesta va ciclu la inceputul listei. O succesiune de valori pot fi
duplicate pentru a completa cele zece
intrarile necesare in lista.
5.6.6.3 General Configuration Logic, coloana 3
Microbuze de transfer pe pneuri Setarea: Shuttle Accel controale de capacitatea
de reactie a Mach3
fiind utilizat pentru a controla executarea de linii de GCode. Shuttle Accel
este, de asemenea, folosit de Backlash.
General de configurare: Z este 2.5D la iesirea # 6, in cazul in verificate,
controale de iesire # 6 in functie de curent
pozitie in program sistem de coordonate de la axa Z. Daca Z este mai mare de
0.0, apoi de iesire # 6
va fi activ. Trebuie sa aveti un axa Z configurat pentru a utiliza aceasta
caracteristica, dar sa si Directia Pasul outputs
pot fi configurate la un inexistent PIN-ul, de exemplu, de pin 0, Port 0.
Home Sw siguranta, daca verificate, va impiedica miscare de o axa in cazul in
care se intoarce acasa in timpul trece de origine este
deja activ. Acest lucru este util pentru a preveni deteriorarea mecanica pe o
masina care partajeaza limita trece la
ambele capete ale axei cu un Home.
5-37
LookAhead determina numarul de linii de GCode ca interpret poate tampon de
executie. El / ea
nu in mod normal necesita tuning.
Ignorati M apeluri in timp ce dezactiveaza incarcarea M apel de executie in
timp ce GCode este interpretata de a trage
instrumentul cale. Unele M apeluri face lucruri ca spindles incepe, la randul
sau, pompe de ulei, etc, care ar trebui sa execute
numai in cazul in care o parte de program este, de fapt, fugi.
M9 dupa executarea Block provoaca un bloc care contine o M9 comanda pentru a
executa M9 ultima. M9 transforma
off de racire. Unele postprocessors scrie o linie de genul: M9 G01 X # #, care
ar putea efectua o taie. Daca M9
a fost oprit atunci cand a fost vazut, nu la sfarsitul celei de-a bloca, a
taiat ultima ar fi facut fara lichid de racire.
UDP atarnat de control speciale OEM optiune pentru Ethernet control pandantiv.
Cei mai multi utilizatori pot ignora.
Run Macro pompe, daca verificate, va arata la pornire pentru fisier
MacroPump.m1s in macro dosar pentru
profilul curent si va rula in fiecare 200 milisecunde.
Incarcati in impiedica de pompa, daca verificate, pastreaza tariful pompa de
iesire (sau rezultate), chiar si atunci cand se impiedica de
detectat. Acest lucru este necesar pentru logica a unor panouri breakout.
Persistenti Jog Mode, daca verificate, isi aminteste de Jog Mode ati ales intre
a conduce
Mach3Mill.
FeedOveride persista, daca verificate, isi pastreaza dreptul de a furajelor
suprascrie selectate la sfarsitul anului o parte de program rulat.
Nici un sistem Meniu in Mach3, daca verificate, elimina bara de selectie a
meniului de
fi de folos intr-un mediu de productie pentru a preveni modificari neautorizate
Optiunea va avea efect, atunci cand reporniti Mach3. Utilizati ATENTIE atunci
cand selectati aceasta optiune! El / ea
se va tine la curent de la a face orice alte modificari
din bara de meniu, daca aveti nevoie de el. O modalitate de a face acest lucru
este aceea de a inlocui dvs. de configurare. Fisier XML cu o
copie proaspata, dar care vor reseta toate celelalte parametrii de configurare,
de asemenea.
Folositi-cheie Click-uri, in cazul in verificate, permite-cheie clicati sunete
de date pentru intrarea in DROs si MDI. (Nu este pusa in aplicare
in versiunea curenta de Mach3.)
Home Slave cu Master Axei, daca verificate, casele ambele motoare de un master
/ slave pereche, in acelasi timp.
Acest lucru nu va face axa straightening, cu toate acestea.
Includeti TLO in Z de
Blocare Rapid Feed FRO sa Feed FRO, daca verificate, se va aplica nici un
procent de alimentare rata suprascrie te
pentru a face rapid de alimentare (de pana la 100% din viteza cu motor tuning),
precum si la rata standard de hrana pentru animale.
Rotatie: Rot 360 rollover, daca verificate, va masura o rotativ axa Modulo 360
(0 - 360 apoi reporniti
de la 0). In caz contrar, se va tine de numarare in sus (de exemplu, doua
rotatii ar fi 720).
ANG scurt Rot pe G0, daca verificate, face orice rotativ axa trata pozitia
administreaza sub un unghi Modulo
360 de grade. Muta va fi de cel mai scurt traseu pentru aceasta pozitie. De
exemplu, in cazul in care s-au axa la 0
de grade si o cerere a fost facuta pentru a roti la 359 de grade, s-ar roti -1
in loc de 359.
Soft de rotatie limite, daca verificate, se aplica limita de software pentru a
trece rotativ axe.
Screen Control: Hi-Res Ecrane, daca verificate, va atrage de doua ori pe ecran
pentru a ajuta la eliminarea pixelization.
Utilizati aceasta numai daca aveti o placa video buna si un computer de repede.
Cutie DROs Grafica si, daca este verificat, atrage un mic frontiera in jurul
GCode, MDI, si instrument calea
si un mic ridicat marginea jurul DRO.
Auto Screen Mareste, daca verificate, va provoca Mach3 pentru a mari orice
ecran, precum si toate obiectele de pe ea, in cazul in care acesta
pixeli are mai putine decat in mod curent PC ecran, asigurandu-se ca-l umple
intregul ecran zona.
5-38
Flash Erori si comentarii, daca verificate, va provoca orice afisate mesaje de
eroare si comentarii la
flash.
5.6.6.4 General Configuration Logic, coloana 4
Consumul de semnal Debouncing / Noise Reduction: Debounce interval / Index
Debounce: Specifica
numarul de impulsuri Mach3 pentru care o trecere trebuie sa fie stabila pentru
sau de semnal pentru a fi considerate valabile. Pentru
exemplu, daca un sistem se ridica la 35000 Hz, 100, ar da despre a 3
millisecond debounce timp
(100 ÷ 35000 = 0,0029 sec). Indicele puls si altor substante de acest fel au
independente setari.
General Configuration (continuare din coloana 3): Dezactivati dalta /
concavitate controale, in cazul in
bifat, Mach3 va verifica in timpul taietor de compensare (G41 si G42) in cazul
in care diametrul de instrument este prea
mare pentru a reduce 'insider colturi', fara gouging la locul de
munca. Bifati caseta pentru a dezactiva avertismentul.
G04 param locui in milisecunde, daca verificate de comanda G4 5000 va oferi o
locui in stare de functionare de 5
de secunde. In cazul in care controlul este bifat, a locui valoare va fi tratat
ca un secunde. (G4 5000 ar da un
locui de 1 ora 23 minute 20 secunde.)
Utilizati WatchDogs, daca verificate, declanseaza o impiedica de Mach3 daca se
pare ca nu este corect sa fie difuzate. Puteti
Trebuie sa debifati-l, daca ai gresit EStops pe computere cu mai lent ca
operatiunile de incarcare Wizards.
Debug acest Executare, daca verificate, ofera in plus pentru a diagnostica
programul designer. ArtSoft SUA va poate cere
pentru a activa aceasta optiune, atunci cand cererea de sprijin.
Enhanced Pulsing, daca este verificata, se va asigura cea mai mare precizie de
sincronizare impulsuri (si, prin urmare, smoothness
de stepper drive), pe cheltuiala suplimentara centrale procesor timp. Ar trebui
sa selectati in general
aceasta optiune.
Se lasa Wave imagini, daca verificate, permite Windows. WAV sunetul clipurilor
de a fi jucat de Mach3. Acest lucru poate fi
utilizat, de exemplu, pentru a semnala erori sau atentia cerute de masina.
Se lasa vorbire, daca verificate, Mach3 permite de a utiliza Microsoft Speech
agent pentru sistemul de informatii
mesaje si de 'dreptul de buton' Ajutor de tip text. Vezi discursul
optiune pe Windows Panoul de control pentru a configura
vocea pentru a fi utilizate, viteza de vorbire, etc
Setare taxe la pompa 5kHz - laser Stndby, daca verificate, taxa de pompe de
iesire sau de iesire (e) sunt un semnal de 5 kHz
(de compatibilitate cu unele lasere), mai degraba decat standard 12.5kHz
semnal.
Utilizarea de iesire 20 Trigger insista ca, in cazul in verificate, se vor
intoarce la iesire 20 locuiesc ori de cate ori este activ.
Nu FRO pe coada, daca verificate, va amana aplicarea ratei de alimentare
suprascrie pana la coada de comenzi
asteapta sa fie puse in aplicare este gol. Acest lucru este uneori necesara
pentru a evita mai mare permisa
viteze de accelerare sau cand cresterea FRO mai sus de 100%.
Intoarce-Manual de ax Incr: Aceasta rubrica va permite sa intre in crestere
pentru a ridica sau cobori in ax RPM
OEM, folosind butoanele de 350 si 351.
Ax OV incrementati: Aceasta rubrica va permite sa intre in procent majorare a
ridica sau cobori in ax
RPM OEM, folosind butoanele de 163 si 164.
CV-ul de control: Plasma Mode, daca verificate, Mach3 de control al punerii in
aplicare a viteza constanta se muta
pentru a se potrivi cu caracteristicile de plasma taietori. Aceasta nu
anti-scufundare in apa si incearca sa nu rotund colturi in anumite
circumstante.
In cea mai mare parte, Statele Unite ale Americii ArtSoft sugereaza sa nu
selectati aceasta optiune, cu exceptia cazului in care masina dvs.
are foarte saraci acceleratie si saraci pas rezolutie.
CV-ul Dist Toleranta va permite sa definiti admisa de urmarire de eroare atunci
cand opereaza in viteza constanta
Mod. Acest lucru va afecta suma de rotunjire la colturi. Stabilirea acestei la
o mare valoare va permite mai repede
miscarii, dar creste rotunjire.
5-39
G100 Adaptive NumbsCV (Obsolete.)
Stop CV-ul pe unghiuri> n CV-ul incearca sa mentina viteza constanta pe tot
parcursul unghiulara sau arc se muta
in timp ce ascultarea de accelerarea parametru. Acest lucru nu este posibil, in
timpul unor miscari, si aceasta optiune va permite
Specificati suma de unghiulara circulatie admisa in CV-ul mod automat inainte
de trecerea
Exact la modul Stop. Setarea la 90 de grade este, de obicei, un compromis bun.
Axa DRO Proprietati: Instrumentul Selectiile persistente, daca este verificat,
isi aminteste selectate instrument la inchidere
de Mach3.
Optional Offset Salvare, in cazul in verificate, va solicita pentru a verifica
daca doriti sa-l faca de fapt nici o salva solicitata
persistenti in compensa.
Persistenti compenseaza, in cazul in verificate, va salva locul de munca si
instrument compenseaza in permanenta tabele pe care le-ati
selectate dintre ruleaza de Mach3Mill. Vezi, de asemenea, Optional Offset
Salvare.
Persistenti DROs, daca verificate, axa DROs vor avea aceleasi valori ca la
pornire, atunci cand este Mach3
inchis. Retineti ca pozitiile de fizica axe sunt, probabil, pentru a fi
pastrate in cazul in care masina
instrument este alimentat in jos, in special cu micro-stepper unitati.
Copiere G54 din G59.253 la pornire, daca este verificat, va re-initializa G54
de offset (de exemplu, lucru compensat 1) valori
de la locul de munca compensate 253 valori Mach3, atunci cand este pornit.
Verificati acest lucru, daca doriti sa inceapa pana
intotdeauna un sistem de coordonate fix (de exemplu, masina de sistem de
coordonate), chiar in cazul in care un utilizator ar putea precedent
au modificat-o si a salvat un non-standard set de valori.
5.7How Profilul informatii sunt stocate
Nota: ArtSoft SUA STONGLY va recomanda sa creati-va propriul profil (e) de
catre o clonare
a furnizat implicit profiluri. Daca faceti acest lucru, nu va modifica implicit
profiluri, atunci cand
configura Mach3. In acest fel, implicit profile va fi intotdeauna la dispozitie
pentru a va ca un cunoscut incepand
punct.
In plus, creand propriile profiluri va ajuta sa va pastrati informatiile de
configurare de la a fi
suprascrisa daca instalati o actualizare a Mach3. Daca modificati furnizate
implicit profiluri (Mach3Mill
sau Mach3Turn), ele vor fi suprascrise de catre program actualizare procesului
si veti pierde toate
setari. A se vedea punctul 2.3, Mach3 Profiluri.
In cazul in care programul este rulat Mach3.exe, va prompt tu pentru profilul
de fisiere sa utilizati. Profiluri general
fi in Mach3 dosar si va avea extensia. XML. Aveti posibilitatea de a vizualiza
si a imprima continutul
Profil de imagini cu Internet Explorer sau alt browser Web. (XML este o
marca-up limbajul folosit pe web
pagini.)
In programul sau de instalare Mach3 stabileste comenzi rapide pentru a rula cu
Mach3.exe implicit Profile pentru o Mill si
pentru Valorificarea (adica Mach3Mill si Mach3Turn). Puteti crea propriile
comenzi rapide, fiecare cu un alt
Profil deci un calculator poate controla o varietate de masini unelte. Acest
lucru este foarte util daca aveti mai multe
mult de o masina si au nevoie de valori diferite pentru tuning auto, sau au
diferite limita si
home trece aranjamente.
Puteti fie sa rulati Mach3.exe (utilizarea de Mach3Loader shortcut) si alegeti
din lista de disponibil
profiluri, sau puteti configura extra rapide specifica faptul ca profilul de
utilizat.
Intr-o scurtatura, pentru a incarca de profil este dat in '/ p'
argument in tinta de proprietati de comenzi rapide.
Pentru a vedea un exemplu, sa inspectati Proprietati de Mach3Mill de comenzi
rapide. Acest lucru poate fi realizat prin clic dreapta
de comenzi rapide si a alege Properties din meniu.
5-40
O. Fisier XML pentru un profil poate fi editat cu un editor de externe, cum ar
fi Notepad, dar nu sunteti foarte
recomanda sa nu se face acest lucru, daca nu sunt pe deplin familiarizat cu
fiecare, in sensul de intrare in
dosar. Unii utilizatori au intampinat foarte ciudat cu efecte mis-fisiere
formatate. Observati ca unele etichete
(de exemplu, pe ecran layout) sunt create doar atunci cand a construit-o in
valoare implicita este suprascrise folosind Mach3
meniuri. Este mult mai sigur de a utiliza Mach3 de configurare al meniuri
pentru a actualiza XML profiluri.
Cand un nou profil este creat, apoi un dosar pentru stocarea sale macro-uri vor
fi create. Daca sunteti 'clonarea'
de la un profil cu macro-uri personalizate, atunci trebuie sa aiba grija de a
copia orice astfel de macro-uri personalizate in
noul profil.
5.8Documenting dumneavoastra Setup
Puteti folosi tabelul 5.5 si tabelul 5.6 pentru a scrie pe setarile pe care
le-au facut.
Tabelul 5-5: Document dvs. Motor Rezultate Setari Aici
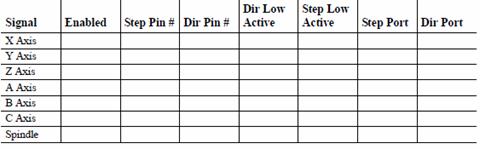
Tabelul 5-6: Semnal de intrare Document dvs. Setari Aici
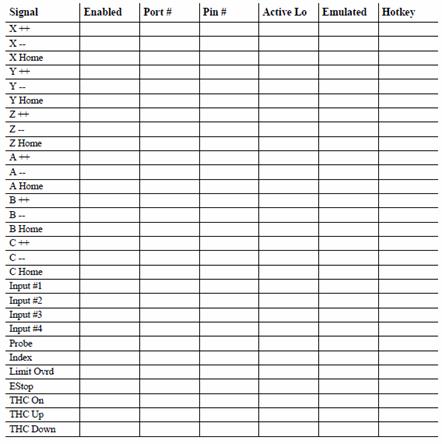
Anexa A
torta Inaltime Controale in Mach3
Exista mai multe setari, LED-uri, si care afecteaza DROs plasma torta inaltime
de utilizare si de control (THC) , in
general, in Mach3. Tabelul A-1 listele celor de control si efectul acestora
asupra programului run-time de comportament.
Tabelul A-1: torta Inaltime Controale in Mach3
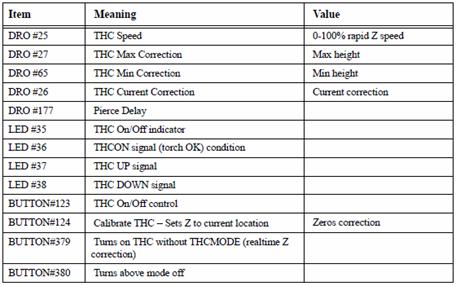
Note:
. Valorificarea ax PE seturi de THC corectie la zero. Min / max pas conteaza
apoi sunt eficiente din curenta Z.
. Doar licentiat versiuni pot permite THC mode.
. Cand in modul de THC, miscarea nu vor incepe pana
Propunere pot fi intarziate cu un decalaj Pierce.
. Intarzieri Pierce spune sistemului sa nu muta intarziere secunde, pana cand
au trecut de la ax (torta) a fost
pornit.
. Config / ax torta AutoOff stabilirea scurteaza intarziere la decolare si, de
asemenea, se stinge lanterna automat in
cazul in miscare se opreste
Index
Un
Accelerare 5-22
configurarea 5-22
importanta configurare pentru precizie 5-23
Active Max conventie 4-2
Active Lo conventie 4-2
Active avion
configurarea implicita 5-36
Addons, instalat cu Wizards 2-2
Permite
discurs 5-38
val de fisiere 5-38
ANG scurt Rot pe G0 5-37
Unghiular axe
configura 5-35
ARCS afisate incorect sau taiate
Modul de setare gresita IJ 5-36
Auto Screen Mareste 5-37
Axa unitate de proiectare
design calcul 4-6
limitare de Mach3 pas rata 4-7
minim posibil muta 4-6
viteza rapida 4-7
Axa jogging 3-3
de MPG 3-4
joystick-ul 3.4
tastatura 3-3
continua jogging 3-4
pas jogging 3-4
Rata suprascriu 3-4
joystick-ul trece peste rata de acceleratie 3-4
incetini viteza 3-4
Axa slaving
scopul si corelarea 4-15
B
Backlash
configura 5-32
incerca sa evite 5-32
utilizeaza Shuttle Accel setare 5-36
Curea sau lant pitch 5-17
Block, nume pentru o linie de GCode 3-5
Blue Screen de Moarte
de actiune pentru a tine dupa, 2-9
Cutie DROs si Grafica 5-37
Breakout bord 4-3
Button
de control pe ecrane 3-2
C
Charge pompa
in timpul impiedica de la 5-37
frecventa 5-38
Cercurile afisate incorect sau taiate
Modul de setare gresita IJ 5-36
Concavitate controale 5-38
Configurati
acceleratie 5-22
actiune
Programul de actiune la sfarsitul 5-35
unghiular axe 5-35
backlash 5-32
curea sau lant pitch 5-17
DROs blocat la initiala de unitati 5-35
initiala de stat 5-35
Mach3 pasi pe unitatea de 5-18
motor viteza max 5-19
motor revs pe unitatea de 5-16
motor pasi pe revolutie 5-18
permanenta DROs 5-39
puls latimi 5-20
corelarea 5-29
rotativ axa de unitati 5-18
Surub revs pe unitatea de 5-16
productia de serie 5-36
slaving 5-33
pasi pe unitatea de 5-16
instrument de schimbare de actiune 5-35
Lichid de racire
configurarea 5-11
Lichid de racire control 4-20
Coordonate de ref comutatoare 5-30
CPR (pe cicluri de revolutie) 5-18
D
Debounce
configura 5-38
Digital citire Vezi DRO
Digitize sonda interfete 4-20
Directia & Pasul interfata Vezi Pasul & Directia
Descarcarea Mach3 2-1
Driver (port paralel)
manualul de instalare 2-9
programul de testare 2-5
DRO
de anulare a intrarii in 3-3
prudenta la schimbarea axei 3-3
de control pe ecrane 3-2
introducerea de date la 3-3
DROs blocat la initiala de unitati 5-35
Locui timp, pentru ax 5-12
E
Editor program
configura filename pentru 5-36
Imitat de intrare semnale 5-7
Encoder intrari
definirea 5-9
Encoder / MPGs fila 5-9
Motor de frecventa
Index-2
alegerea potrivita valoarea 5-3
definirea 5-3
Enhanced pulsing
procesor cerinta pentru 5-38
Impiedica de buton
oprire de urgenta 1-4
functiei 4-4
inchidere a fabricii, pana la reinitializati 4-5
care nu implica software-ul 4.4
F
Fault gasirea
port abordarea si conexiunile 5-14
Flash Erori si comentarii 5-38
De inundatii de racire 4-20
G
G04, locui
de unitati de P cuvantul in 5-38
GCode fereastra
de control pe ecrane 3-2
Dalta controale 5-38
Pamant
semnal de 4-3
H
Hi-Res Ecrane 5-37
Home Slave cu Master Axa 5-37
Prima pagina a comuta
nu langa axa limita 4-15
Scopul 4-9
Prima trece se vedea, de asemenea Limita comutatoare
Hotkeys
configurarea 5-31
defaults pentru jog 5-32
Eu
Ignorati M apeluri in timp ce incarcare 5-37
IJ Mode
G02/G03 defineste cum sunt interpretate 5-36
Includeti TLO in Z de
Index
definirea de aderenta pentru puls 5-7
interfata pentru ax 4-22
Initiala de stat
configura 5-35
Initializarea sir 5-36
Intrare PINS
lipsa de 5-7
Semnalele de intrare
interfatare 4-23
Semnale de intrare fila 5-5
Consumul
definire care sa fie folosite 5-4
Instalare
erori dupa 2-9
Instalarea Mach3 2-1
Imbuca
comutator pentru paznici 5-36
J
Urmati Jog Mode 5-34
Jog pas
stabilirea dimensiunii 3-4
Vezi Axa jogging jogging
K
Tastatura
comenzi rapide 3-3
Tastatura emulator
suplimentare pentru semnalele de intrare 5-7
L
LED
de control pe ecrane 3-2
Light emitting diode LED Vezi
Limita de comutatoare 5-7
cablare 4-13
de definire a trece peste introducere 5-7
externe, de punere in aplicare 4-10
logic SAU electronice pentru comutatoare 4-11
manual 4-14
microswitches
precizie de 4.12
overtravel 4-12
montare 4-13
Scopul 4-9
partajarea Mach3 intrari 4-10, 4-14
Limitele, moale
Soft limitele 5-30
Linear scara de sticla
nu face parte din servo bucla 4-22
quadrature interfata 4-20
Blocare Rapid Feed FRO sa Feed FRO 5-37
LookAhead 5-37
M
M01 Control 5-36
M30, configurati actiune de la 5-35
M9 dupa executarea Block 5-37
Mach3
taxa de pompe monitoriza Vezi Charge pompa
Componente de 2-4
computer cerintele 1-4
demonstratie versiune 2.1
cum distribuite 2-1
pe laptop 1-4
puls monitor Vezi Charge pompa
caracteristici ce-l accepta 1-4
Masini de ce-l pot controla 1-4
Mach3 Addons pentru Mill, instalat cu Wizards 2-2
Manuala a datelor de intrare (MDI) 5-23
Manual de date de intrare se vedea MDI
Manual de Puls generatoare (MPGs) 1-3
definirea intrarilor 5-9
Index-3
pentru jogging 3-4
Ax viteza maxima 5-26
Mcalls, in timp ce ignora incarcare 5-37
MDI
de control pe ecrane 3-2
ecran de 3.5
predarea functiei 3-5
utilizarea de istorie 3-5
MDI (manuala a datelor de intrare) 5-23
Mill Opþiuni fila 5-13
Mist de racire 4-20
Motor
inversarea directie 5-20
revs pe unitatea de 5-16
pasi pe revolutie 5-18
Motor Rezultate fila 5-4
Motor pulleys Vezi Pulleys
Motor Tuning dialog 5-19
Mouse
utilizand Mach3 fara 3-3
MPG
Vezi Maual Puls generatoare (MPGs)
N
Native Unitati de dialog 5-14
NC masina
parti de 1-2
Nici un sistem Meniu in Mach3 5-37
Zgomot
semnal de 4-3 pe teren
O
OEM Trigger intrarilor 5-7
OEM declanseaza
configurarea 5-31
Offset salva de dialog 5-39
Semnalele de iesire
interfatare 4-23
Semnale de iesire fila 5-8
Rezultate
definire care sa fie folosite 5-4
P
Port paralel
D25 conector pinout 4-2
general 4-1
Parallel port driver
instala manual 2-9
programul de testare 2-5
Partea a Programului
ruleaza un esantion 3-5
PC
configurare necesare 1-4
Permanent DROs
configura 5-39
Persistenti feed suprascriu 5-37
Persistenti jog Mod de 5-37
Persistenti compensa 5-39
Plasma Mode 5-38
Port adrese, gasirea cu Windows Control Panel 5.3
Port de instalare si de selectare Axa fila 5-2
Porturi si Pins dialog 5-1
Probe - cerinte de proiectare 4-20
Profiluri
cum stocate 5-39
multiple, pentru a permite controlul a mai multor masini unelte 5-39
persistenta atunci cand actualizarea Mach3 2-10
selectarea pe rselected de / p argument in shortcut
tinta 2-4
alegerea pe care ruleaza Mach3.exe 2-4
specificate in / p argument 5-39
Programul final
configura o actiune de la 5-35
Pulleys
explicatie a 5-26
raporturile pentru ax unitate 5-12
setare de viteza de max 5-26
Puls latime modulata de control
motor de viteza 4-18
Puls latime modulata ax Vezi ax, PWM
Puls latimile
configurarea 5-20
PWM
PWM de control de viteza se vedea, de asemenea ax
PWM limita de viteza minima de 5-12
PWM Vezi Puls latime modulata
R
Re-boot in timpul instalarii
cum sa dezinstalati driverul manual, daca nu reusesc sa o fac 2-10
motiv pentru 2-4
Corelarea
configura 5-29
detalii de Mach3 actiunile 4-14
Reconditionarea masinilor vechi CNC
precautie 1-4, 4-5
Mers cu motor de directie 5-20
Rot 360 rollover 5-37
Limitele de rotatie Soft 5-37
Run Macro Pump 5-37
S
Salvati compensa 5-39
Ecran
automata Marit 5-37
cutie DROs si grafica 5-37
exemplu de LED 3-2
Hi-Res 5-37
esantion machete 3-1
Surub revs pe unitatea de 5-16
Uzat de echipamente, o precautie 4-5
Serial de iesire
configura 5-36
Index-4
Servo motor drive
proprietati 4-5
Setup unitati
alegerea intre inch si milimetri 5-14
Comenzi rapide Consultazi Comenzi rapide de la tastatura
Semnal
teren 4-3
Slave axa Vezi Axa Slaving
Slaving
configura 5-33
Soft limitele Vezi Limite
Soft limitele, de rotatie 5-37
Special Mach3.sys conducator auto
nevoia de 2-9
SpecialDriver.bat 2-9
Discursul, permite 5-38
Ax
optiuni de control 4-18
In sensul acelor de ceasornic si de sens opus acelor de ceasornic de control
configurarea 5-11
intarziere locui ora 5.12
unitate, configurarea 5-10
PWM de control al vitezei 5-12, 5-28
Pasul & Directia de control al vitezei 5-29
Pasul si Directia de control 5-12
Ax de control
in sensul acelor de ceasornic / ceasornic 4-18
interlocking cerintele 4-18
Ax fila Configurare 5-10
Ax de viteza
maxima, definite pentru pulleys 5-26
Pasul & Directia
ax unitate 4-18
Pasul & Directia de interfata
precautie despre activ hi / lo 4-8
waveforms 4-8
Stepper motor drive
limita de capacitate 4-5
proprietati 4-5
Pasii pe unitatea de 5-16
S-cuvant, ax viteza comanda 5-26
Sistemul de hotkeys
configurarea 5-31
T tangential de control
de cutit etc 4-20
Predarea
pentru a stoca secventa de comenzi MDI 3-5
Testarea
Axa de calibrare 5-23
setari de configurare 5-14
pasi pentru a pierdut 5.25
ax unitate 5-29
THC, torta inaltime de control A-1
Temporizare
definirea de aderenta pentru puls 5-7
Instrumentul de schimbare de actiune
configura 5-35
Toolpath
afisa configuratia 5-33
Toolpath de afisare
de control pe ecrane 3-2
Torta inaltime de control (THC) A-1
TTL
curent sursa si scufundarea 4-2
semnal de nivelurile 4-2
U
UDP atarnat de control 5-37
Un-instalare de driver
manual 2-10
Folositi-cheie Clicks 5-37
V Vista, poate solicita o
registru patch 2.4
W Wave imagini, permite 5-38
Wizards, instalare 2-2
Copyright © 2026 - Toate drepturile rezervate