|







 |  |
|
| |
 | Biologie | Chimie | Didactica | Fizica | Geografie | Informatica |
| Istorie | Literatura | Matematica | Psihologie |
Sisteme cu Inteligenta Artificiala
- Controlul Balantei folosind un scripete -


Tema:
Sistem inteligent pentru luarea deciziei folosind instrumente de modelare cu logica Fuzzy cu simularea acestora in medii de calcul specializate ( Toolbox-urile din Matlab ). Se va alege o problema , se va concepe modelul si se vor obtine rezultatele prin simulare.
Descriere aplicatie:
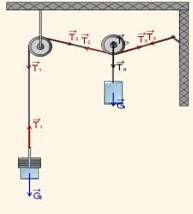
Vreau sa concep un model de control a unei balante, folosind un scripete pe care sunt cele doua talere, cu ajutorul logicii Fuzzy si deci cu ajutorul Inteligentei Artificiale. Inteligenta arficiala este acea ramura a stiintei care se ocupa cu studierea metodelor de a face ca masinile sa rezolve sarcini specifice inteligentei umane (care e acea latura a personalitatii ce vizeaza capacitatea de a rationa, de a memora, de a invata, de a crea). Logica fuzzy este unul din domeniile de interes din cadrul AI.
Acest scripete va fi fixat, iar la capatul celor doua cabluri vor fi doua talere , la fel ca la o balnta.Cu ajutorul acestui scripete, vreau sa aflu forta cu care sa actio-nez pentru a contrabalansa greutatea de intrare pe o parte a firului de actionare. Vreau sa modific forta in asa fel incat greutatea de intrare sa fie la o pozitie de echi-libru, deci cele doua talere sa fie la echilibru. Atunci cand pe un taler se va pune o greutate de intrare, se va tine cont si de distanta deplasata a talerului si se va calcula greutatea de iesire , de pe talerul doi astfel incat acestea sa fie la final din nou in echilibru.
Etapele de proiectare:
Elaborarea specificatiilor.
Determinarea variabilelor.
Determinarea universurilor de discurs pentru variabile.
Rafinarea bazei de reguli primare.
Determinarea functiilor de apartenenta.
Construirea bazei de reguli fuzzy.
Alegerea metodelor de calcul.
Implementarea sistemului.
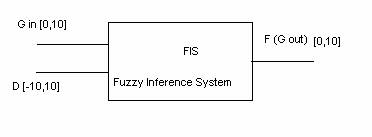
Initial ca variabile de intrare vor fi Greutatea de intrare si distanta la care se va afla obiectul, iar ca iesire va fi forta cu care voi actiona (aceasta va fi reprezenta-ta tot ca o greutate, dar de iesire).
Greutatea de intrare va avea valori intre 0 si 10, distanta va fi intre -10 si 10, iar greutatea de iesire (forta) va avea valori tot intre 0 si 10.
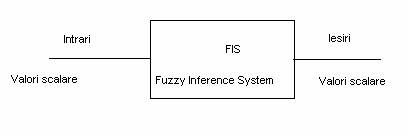
Figura privind structura generala a unui sistem de inferente Fuzzy:
Pe cazul particular al aplicatiei mele aceasta figura devine:
Rezolvarea unei probleme de control cu ajutorul logicii fuzzy se poate face prin realizarea unui sistem de inferente fuzzy (FIS - Fuzzy Inference System). Structura interna a unui FIS cuprinde urmatoarele componente:
- blocul de fuzzificare
- baza de reguli fuzzy
- motorul de inferente fuzzy
- blocul de defuzzificare
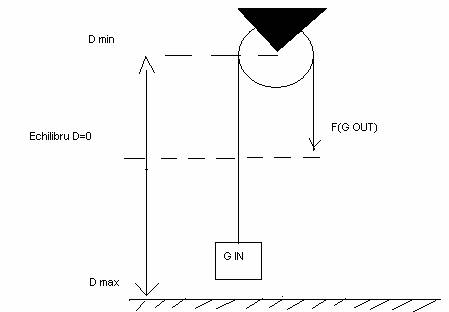
O abordare fizica, pentru a intelege fenomenul se prezinta in continuare:
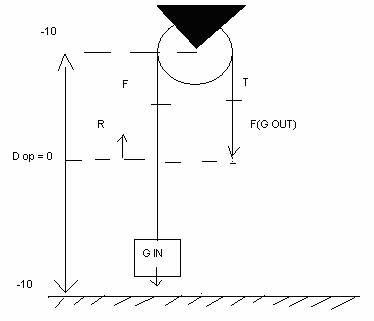
Unde : D op este distanta optima,adica pozitia de echilibru
R este forta rezultanta ,T este tensiunea din fir
Exista cazurile:
Daca F=G in atunci se ramane in echilibru
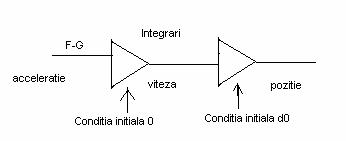
Daca F-G>0,adica F > G atunci prin integrare viteza creste si distanta(pozitia) scade
Daca F-G<0,adica F < G atunci rezultanta scade
![]() =
=![]()
Daca ![]()
![]()
![]()
In continuare voi prezenta printscreen-uri cu aplicatia , in ordinea dezvoltarii ei .
Prima data am realizat Sistemul de interferenta Fuzzy cu ajutorul toolbox-ului Fuzzy din Programul Matlab:
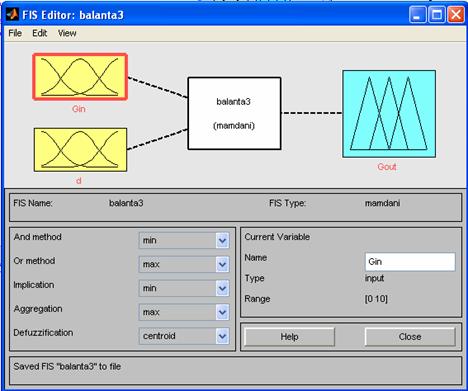
Fig. Structura FIS-ului
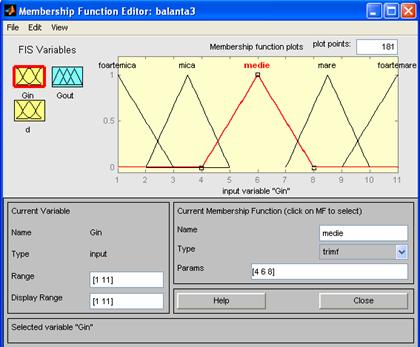
Fig. Functia de apartenenta pentru variabila Gin (de intrare)
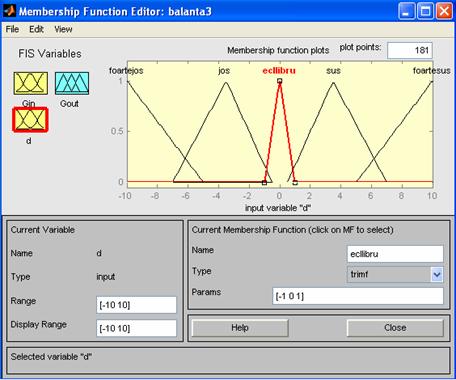
Fig. Functia de apartenenta pentru variabila d (de intrare)
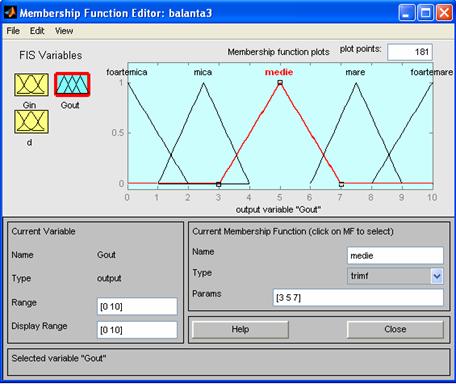
Fig. Functia de apartenenta pentru variabila Gout (de iesire)
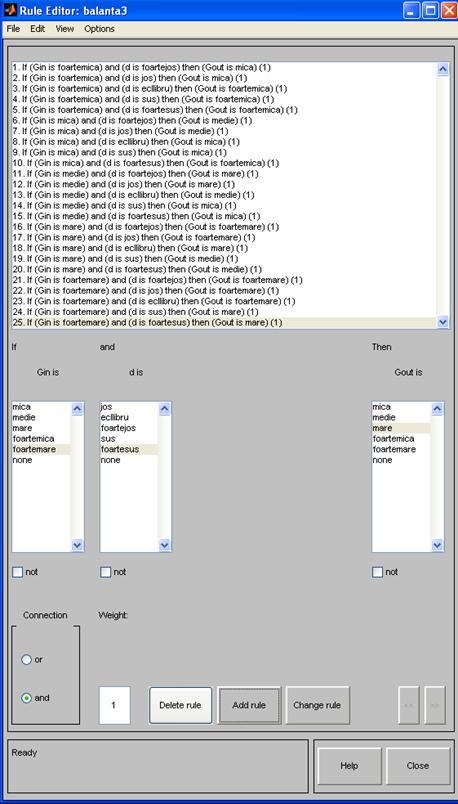
Fig. Structura regulilor
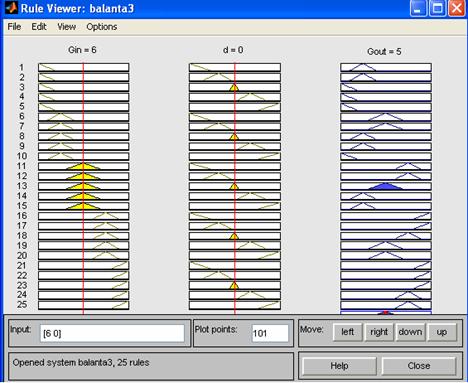
Fig. Vizualizarea grafica a regulior
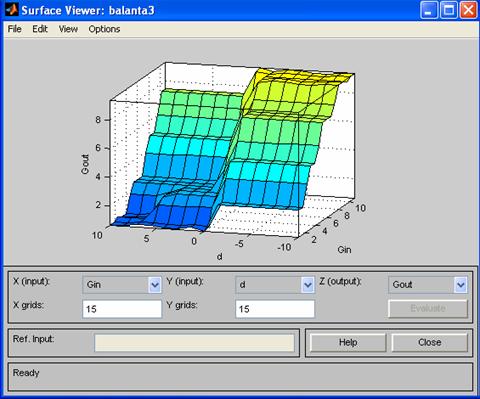
Fig. Vizualizarea suprafetei generate
Acum voi prezenta simularea cu ajutorul toolbox-ului Simulink-ului din Matlab:
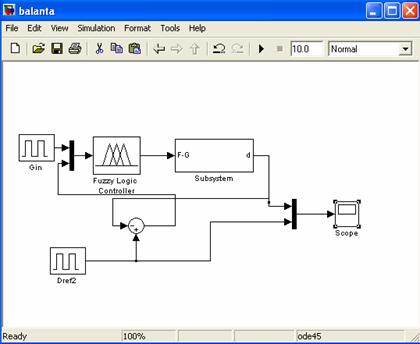
Fig. Simularea finala a sistemului controlat
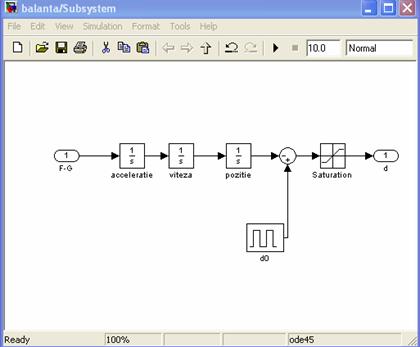
Fig. Structura Subsistemului din prezentarea sistemului controlat
Simularile sunt urmatoarele:
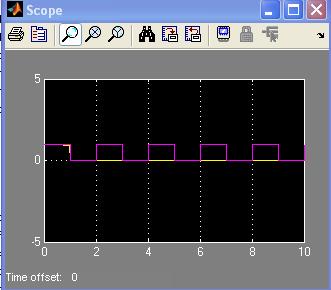
Fig. Simulare cu generator de puls pentru distanta in forma dreptunghilara
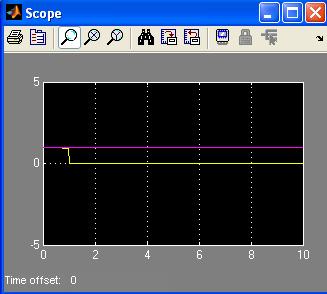
Fig. Simulare cu generator de puls de tip constant pentru distanta
La o scara mai larga ,pentru a vedea ce se intampla, simularile sunt urmatoare :
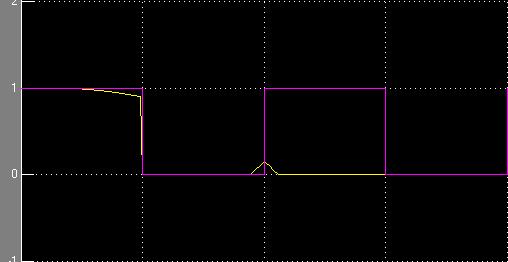
Fig. Simulare cu generator de puls pentru distanta in forma dreptunghilara
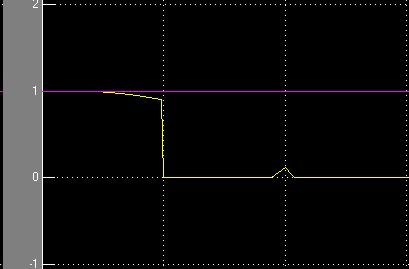
Fig. Simulare cu generator de puls de tip constant pentru distanta
Copyright © 2025 - Toate drepturile rezervate