|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
Mecanismul cu bare
Se impune schema cinematica a mecanismului plan de clasa a II-a cu doua contururi inchise independente fig(1).
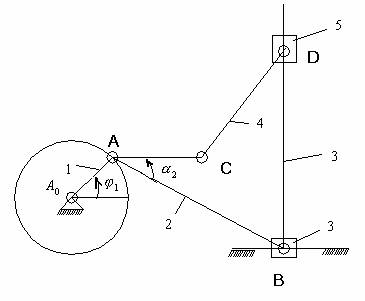
fig. 1.
Se dau lungimile elementelor:
Se impune miscarea uniforma a manivelei 1 (conducatoare) prin turatia n=470 rot/min.
Geometria grafica a mecanismului
Analiza geometrica a mecanismului
implica definirea atat a lungimilor constatnte (notate cu ![]() ) si a celor variabile (notate cu
) si a celor variabile (notate cu ![]() ), cat si a unghiurilor constante (notat co
), cat si a unghiurilor constante (notat co ![]() ) si a unghiurilor variabile (notate cu
) si a unghiurilor variabile (notate cu ![]() ).
).
Parametrii constanti sunt:
![]()
Pentru trasarea la scara a schemei
cinematice se adopta scara lungimilor constante sau variabile: ![]() .
.
In functie de scara aleasa se calculeaza lungimile constante pe desen cu formula:
![]()
Pentru trasarea la scara a schemei cinematice separcurg urmatoarele etape:
se
alege, pe plansa, punctul fix ![]() in partea stanga jos;
in partea stanga jos;
se
pozitioneaza punctul fix ![]() fata de
fata de ![]() prin masurarea
coordonatelor carteziene
prin masurarea
coordonatelor carteziene ![]() ;
;
se
pozitioneaza punctul fix ![]() fata de
fata de ![]() prin masurarea
coordonatelor carteziene
prin masurarea
coordonatelor carteziene ![]() ;
;
se
masoara in sens trigonometric, fata de ![]() , unghiul
, unghiul ![]() si pe directia
obtinuta se pozitioneaza punctul mobil A
prin masurarea lungimii
si pe directia
obtinuta se pozitioneaza punctul mobil A
prin masurarea lungimii ![]() ;
;
se
construiesc arcele de cerc ![]() cu centrul in
cu centrul in ![]() de raza
de raza ![]() si
si ![]() cu centrul in A de raza
cu centrul in A de raza ![]() ;
;
cele
doua arce de cerc se intersecteaza in punctele B si B ; se alege punctul B din
conditia de continuitate a miscarii, ceea ce corespunde solutiei adoptate in
pozitia initiala a manivelei ![]() ;
;
se
masoara fata de AB unghiul constant ![]() ; intersectia dintre directia obtinuta si paralela din
; intersectia dintre directia obtinuta si paralela din ![]() la axa
la axa ![]() , punctul C,
reprezinta centrul articulatiei dintre elementele 2 si 4;
, punctul C,
reprezinta centrul articulatiei dintre elementele 2 si 4;
pe
eceasta plansa se masoara parametrii de pozitionare ai elementelor cinematice
conduse ![]() ;
;
Se realizeaza filmul miscarii mecanismului pe un ciclu cinematic
complet ![]() repetand constructia
grafica mentionata anterior.
repetand constructia
grafica mentionata anterior.
Avand schema cinematica trasata in 24 pozitii succesive se pot masura parametrii, apoi se traseaza diagramele de variatie ale deplasarilor unghiulare si liniare.
3.1 Calculul geometro-analitic al conturului 1
Conturul vectorial 1 este asociat lantului cinematic inchis, prin orientarea fiecarei laturi astfel incat unghiul de pozitionare sa fie mai mic posibil.
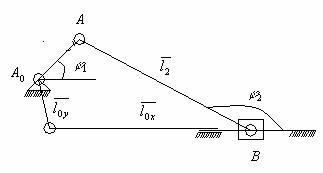
fig. 2.
Se scrie ecuatia vectoriala de inchidere a conturului 1:
![]()
![]()
Se scriu ecuatiile de proiectii pe axele de coordonate:
![]()
Calculul deplasarilor liniare si unghiulare
![]()
![]()
Calculul vitezelor liniare si unghiulare
Se deriveaza ecuatiile scalare de deplasare, in functie de timp, obtinandu-se:
![]()
Calculul acceleratiilor liniare si unghiulare
Se deriveaza ecuatiile scalare de viteza, in functie de timp, obtinandu-se:

![]()
Calculul geometro-cinmatic al conturului II
Conturul vectorial II este asociat cinematic inchis, prin orientatrea fiecarei laturi astfel incat unghiul de pozitionare sa fie cat mai mic posibil.
Se scrie ecuatia vectoriala a conturului II:
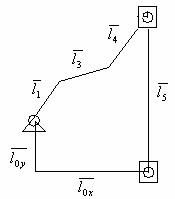
fig. 3.
![]() ,
, ![]()
Se scriu ecuatiile de proiectii pe axele de coordonate:
![]()
Calculul deplasarilor liniare si unghiulare
Sistemul de ecuatii partial neliniare, de mai sus
, se rezolva prin metoda eliminarii uneia din cele doua necunoscute ![]() si
si ![]() :
:
Calculul vitezelor liniare si unghiulare
Se deriveaza ecuatiile scalare de deplasare, in functie de timp, obtinandu-se:
Rezulta:
Calculul acceleratiilor liniare si unghiulare
Se deriveaza ecuatiile de viteza, in functie de timp, obtinandu-se:

Copyright © 2025 - Toate drepturile rezervate