|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
Masina de inductie. Prezentare generala.
1.1.Introducere.
Masina de inductie este prevazuta cu infasurari plasate in crestaturi distribuite pe periferia statorului si a rotorului .Aceste crestaturi sunt realizate din tole feromagnetice.
Infasurarile sunt parcurse de curent alternativ de diferite frecvente atat in stator cat si in rotor.
Campul magnetic invartitor este produs de catre infasurarea primara (inductor).Aceasta poate fi monofazata, bifazata, sau trifazata.Cele mai multe masini de inductie, mai ales cele pentru actionarile industriale sunt trifazate.In cadrul masinii de inductie, statorul este inductorul, iar rotorul este indusul.
Rotorul (indusul) se realizeaza in doua variante : rotor in colivie, si rotor bobinat.In cazul rotorului in colivie, aceasta poate fi: simpla sau dubla, din aluminiu, alama, cupru.In cazul rotorului bobinat, pe periferia rotorului se plaseaza o infasurare trifazata plasata la inele de contact.
Masina de inductie poate functiona in 2 regimuri:
motor
generator
Cel mai frecvent masina de inductie se utilizeaza in regim de motor, la tensiuni pana la 10KV, puteri pana la 25 MW, si turatii pana la peste 100 000 rpm in aplicatii speciale la puteri mici.In cadrul aplicatiilor speciale de puteri mari mentionam actionarea pompelor centrifuge, a ventilatoarelor, etc.
Masina de inductie este cea mai utilizata in domeniul actionarilor electrice datorita fiabilitatii sale precum si a costului redus.In cazul in care avem nevoie de turatii variabile in anumite actionari electrice, masina de inductie se alimenteaza prin convertoare statice de putere in stator la domenii largi de variatie a tutatiei, si in rotor la domenii restranse de variatie a turatiei masinii cu rotor cu inele( bobinat).
Prin intermediul inductiei electromagnetice campul magnetic invartitor va induce in infasurarea rotorica o tensiune. Aceasta
tensiune creaza un curent electric prin infasurare si asupra acestei infasurari actioneaza o forta electromagnetica ce pune rotorul in miscare in sensul campului magnetic invartitor. Motorul se numeste asincron pentru ca turatia rotorului este intotdeauna mai mica decat turatia campului magnetic invartitor, denumita si turatie de sincronism. Daca turatia rotorului ar fi egala cu turatia de sincronism atunci nu ar mai avea loc fenomenul de inductie electromagnetica, nu s-ar mai induce curenti in rotor si motorul nu ar mai dezvolta cuplu.
 Sectiunea masinii de inductie cu evidentierea elementelor
componente este prezentata in figura de mai jos:
Sectiunea masinii de inductie cu evidentierea elementelor
componente este prezentata in figura de mai jos:
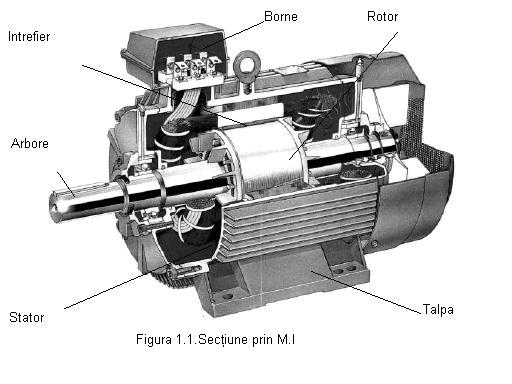
Elementele principale evidentiate mai sus sunt realizate din diferite materiale:statorul este prevazut cu miez magnetic din tole silicioase cu cristale neorientate in care se practica pe intreaga periferie crestaturi pentru a acomoda o infasurare de curent alternativ mono sau trifazata, rotorul este deasemenea prevazut cu miez magnetic din tole cu crestaturi in care se plaseaza bare conductoare scurtcircuitate prin inele la capatul masinii ( in cazul
rotorului in colivie), sau o infasurare trifazata conectata la inele de contact( in cazul roturului bobinat).
In regim de motor, functionarea masinii asincrone poate fi explicata dupa cum urmeaza. La alimentarea infasurarii statorice (trifazata si simetrica) cu un sistem de tensiuni trifazat, simetric si echilibrat, spirele infasurarii vor fi strabatute de curenti, care formeaza, de asemenea, un sistem trifazat, simetric si echilibrat, asa cum se reprezinta schematic in figura de mai jos:
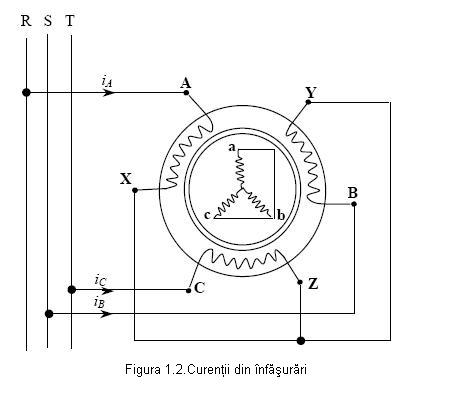
Curentii de pe toate cele 3
faze au aceeasi amplitudine, aceeassi frecventa, dar sunt defazati cu cate ![]() (120) grade electrice.Variatia in timp a curentilor este
reprezentata in figura urmatoare:
(120) grade electrice.Variatia in timp a curentilor este
reprezentata in figura urmatoare:
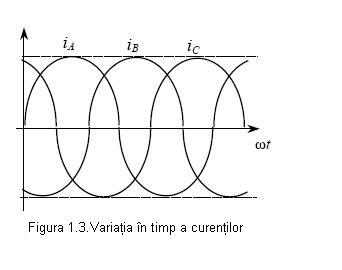
Solenatiile infasurarilor sunt repartizate simetric la periferia armaturii si variaza in timp cu aceeasi frecventa, dar defazat cu
2π/3 grade electrice.Sunt astfel indeplinite conditiile
de producere
a unui camp magnetic invartitor, numit camp magnetic inductor.
Daca consideram ![]() frecventa tensiunii de
alimentare, iar pulsatia
frecventa tensiunii de
alimentare, iar pulsatia ![]() are expresia :
are expresia :
![]() (1.1)
(1.1)
![]() - pulsatia curentilor prin infasurari
- pulsatia curentilor prin infasurari
Daca infasurarile sunt construite cu p perechi de poli, atunci turatia campului invartitor , numita si turatie de sincronism are expresia de mai jos:
![]() (1.2)
(1.2)
Infasurarea rotorica, fie ca
este formata dintr-o colivie polifazata, fie ca este o infasurare trifazata
scurtcircuitata, functioneaza cu circuitele fazelor inchise. Campul invartitor
induce in infasurarile rotorice (polifazate si simetrice), un sistem de
tensiuni electromotoare polifazat simetric si echilibrat.Daca rotorul este in
repaus( are turatia ![]() ),atunci intre infasurarile dintre stator si rotor se creaza
un cuplaj transformatoric, frecventa tensiunilor induse fiind
),atunci intre infasurarile dintre stator si rotor se creaza
un cuplaj transformatoric, frecventa tensiunilor induse fiind ![]() .
.
Daca rotorul se invarte cu o
turatie ![]() , atunci turatia relativa
a campului invartitor fata de rotor este
, atunci turatia relativa
a campului invartitor fata de rotor este ![]() , iar frecventa tensiunilor electromotoare induse este:
, iar frecventa tensiunilor electromotoare induse este:
![]() (1.3)
(1.3)
unde avem
![]() (1.4)
(1.4)
s-alunecarea (ramanere in urma)a rotorului fata de campul magnetic invartitor.
Infasurarile rotorice, formand circuite inchise, sunt parcurse de curenti care formeaza un sistem polifazat, simetric si echilibrat; la randul lor, solenatiile infasurarilor de faza rotorice produc un camp magnetic invartitor de reactie (sau indus), cu turatia:
![]() (1.5)
(1.5)
fata de armatura rotorica si ![]() fata de stator.
fata de stator.
Alunecarea rotorului fata de campul invartitor inductor este explicata, la functionarea in gol, prin
existenta frecarilor care i insotesc
miscarea rotorului (frecarile din lagare si frecarile cu aerul, in procesul de
ventilatie) si care produc un cuplu de franare (opus cuplului electromagnetic).
Pe de alta parte, daca turatia rotorului si a campului invartitor ar fi egale,
deci s = 0, in infasurarea rotorica nu s-ar induce tensiuni
electromotoare,
astfel incat nu ar putea sa apara curenti rotorici, nu ar exista campul invartitor de reactie si nu s-ar produce cuplu electromagnetic; in concluzie, motorul nu ar putea functiona. Marimea alunecarii da 'masura' incarcarii in sarcina a motorului asincron, deoarece la functionarea in sarcina cuplul de franare (rezistent) al mecanismului actionat mareste alunecarea fata de valoarea de la functionarea in gol.
Pentru marimile electrice si magnetice care intervin in functionarea masinii seconsidera, in aceasta tratare, forma armonica de variatie in timp, respectiv se iau in considerare numai armonicile fundamentale; aceasta ipoteza este motivata, pe de o parte, prin
faptul ca numai ele au rol in transmiterea puterii utile prin masina (armonicile superioare au numai efecte negative in functionare - cupluri parazite si pierderi suplimentare), iar pe de alta parte, permite simplificarea semnificativa a expresiilor acestor marimi, in conditiile in care principalele fenomene electromagnetice sunt pe deplin explicate.
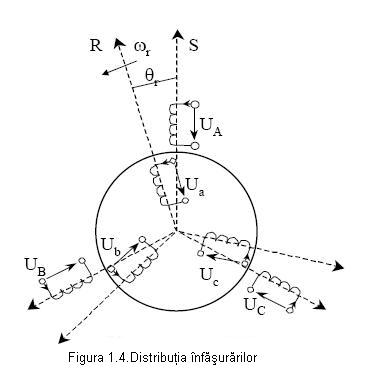
Din motive de simetrie, in reprezentarea
ecuatiilor masinii asincrone se considera faza
reprezentativa (de exemplu faza A-X din stator, respectiv a-x
din rotor), iar marimile electrice de faza primesc indicele (1) pentru stator
si indicele (2) pentru rotor. Ecuatiie scrise pentru faza reprezentativa pot fi
usor adaptate la celelalte doua faze prin introducerea defazajului
caracteristic de ![]()
1.2.Ecuatiile masinii de inductie.Scheme echivalente.
Regimuri de functionare.
1.2.1.Ecuatii generale
Pentru a putea scrie ecuatiile masinii de inductie, vom porni de la figura urmatoare:
![]() In scrierea
ecuatiilor masinii de inductie se neglijeaza deocamdata saturatia, pierderile
in fier, si armonicile din campul magnetic si cele din tensiunea indusa.Se
considera toate toate fazele statorice, si respectiv rotorice cuplate exclusive prin campul principal si cu
asocierea sensurilor de receptor in
stator si rotor.
In scrierea
ecuatiilor masinii de inductie se neglijeaza deocamdata saturatia, pierderile
in fier, si armonicile din campul magnetic si cele din tensiunea indusa.Se
considera toate toate fazele statorice, si respectiv rotorice cuplate exclusive prin campul principal si cu
asocierea sensurilor de receptor in
stator si rotor.
Ecuatiile celor 3 faze se scriu sub forma:
 (1.6)
(1.6)
Ecuatiile masinii de inductie se pot scrie direct si sub forma matriciala:
![]() (1.7)
(1.7)
In cazul in care se adopta ipoteza repartitiei sinusoidale a infasurarilor, inductantele variaza sinusoidal cu pozitia rotorului.
Ecuatiile fluxurilor se pot scrie si sub forma:
![]() (1.8)
(1.8)
Matricea inductantelor se scrie sub forma de mai jos:
In cazul tensiunilor, curentilor si fluxurilor, matricile acestora sunt de tip coloana, in timp ce in cazul rezistentelor, matricea acestora este de tip diagonal:
![]() (1.9)
(1.9)
Pentru ecuatia miscarii vom avea :
 (1.10)
(1.10)
Facand referire la relatia (1.10) vom explicita termenii dupa cum urmeaza:
J- moment de inertie
P- numarul de perechi de poli
Me- cuplul electromagnetic
Mr - cuplul rezistiv
In cazul in care dorim sa simulam masina de inductie, cuplul rezistiv Mr, se considera marime de perturbatie.
Tensiunea electromotoare indusa intr-o infasurare de faza statorica( armonica fundamentala) are expresiade mai jos:
![]() (1.11)
(1.11)
![]() (1.12)
(1.12)
In cazul relatiilor (1.11) si (1.12) descrierea termenilor se face in modul urmator:
![]() -valoarea maxima a
fluxului util prin masina
-valoarea maxima a
fluxului util prin masina
![]() -numarul de spire al infasurarii statorice
-numarul de spire al infasurarii statorice
![]() -factorul de infasurare care tine seama de elementele
constructive ale infasurarii statorice.
-factorul de infasurare care tine seama de elementele
constructive ale infasurarii statorice.
Tensiunea electromotoare
indusa intr-ofaza a infasurarii rotorice are expresia similara cu cea de mai sus dar tine seama ca infasurarea
rotorica se afla in miscare de rotatie, cu turatia n a rotorului, iar
campul invartitor inductor se roteste cu turatia n1 fata de stator si cu
turatia ![]() fata de rotor; astfel,
fata de infasurarea rotorica, fluxul va pulsa cu frecventa f2 = sf1,
iar t.e.m. induse in infasurarea rotorica vor avea amplitudinea
fata de rotor; astfel,
fata de infasurarea rotorica, fluxul va pulsa cu frecventa f2 = sf1,
iar t.e.m. induse in infasurarea rotorica vor avea amplitudinea
proportionala cu f2 si vor varia in timp cu aceeasi frecventa f2.
![]() (1.13)
(1.13)
![]() (1.14)
(1.14)
In afara fluxului magnetic util, in masina exista si flux de dispersie (in jurul capetelorde bobina, in crestaturi, etc.). Fluxurile
de dispersie pentru stator, respectiv rotor se pot exprima in
functie de inductivitatile globale si cele de dispersie ![]() si
si![]() .
.
![]()
![]() (1.15)
(1.15)
1.2.2Cuplul Masinii de inductie
a)Cuplul electromagnetic al masinii asincrone se poate exprima, ca la orice masina prin relatia de mai jos:
![]() (1.16)
(1.16)
b)Cuplul mecanic se scrie cu ajutorul relatiei urmatoare:
![]() (1.17)
(1.17)
Daca se considera ![]() , daca tinem seama de definitia alunecarii , si de relatiile de mai sus, vor rezulta relatiile de mai jos:
, daca tinem seama de definitia alunecarii , si de relatiile de mai sus, vor rezulta relatiile de mai jos:
![]() ;
; ![]() (1.18)
(1.18)
![]() -pierderi prin efect
Joule (1.19)
-pierderi prin efect
Joule (1.19)
In functie de alunecare ,cuplul electromagnetic se scrie cu ajutorul relatiei de mai jos:
 (1.20)
(1.20)
 (1.21)
(1.21)
Pentru a reprezenta grafic M(s), caracteristica mecanica a masinii asincrone, dupa relatia de mai sus, se pot face aproximari pentru diferite zone de variatie a alunecarii, si se pot pune in evidenta anumite puncte specifice, rezultand curba trasata in figura urmatoare:
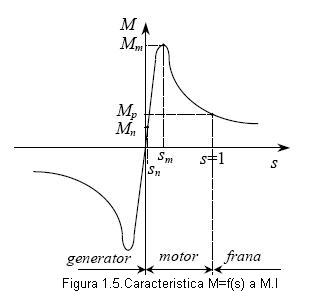
punctul de sincronism :s=0; M=0;
-la alunecari mici : (0<s<0,05),![]() ,
,![]() astfel incat cuplul
astfel incat cuplul ![]() variaza direct
proportional cu alunecarea
variaza direct
proportional cu alunecarea
-la alunecari mari (0,5<s<1), (![]()
![]() astfel incat cuplul electromagnetic
astfel incat cuplul electromagnetic ![]() variaza invers
proportional cu alunecarea
variaza invers
proportional cu alunecarea
-punctul de cuplu maxim poate fi determinat
din conditia de extrem, pusa functiei M(s) astfel: ![]() cu solutia
cu solutia
-alunecarea critica ![]() , fata de valorile
uzuale pentru alunecarea nominala
, fata de valorile
uzuale pentru alunecarea nominala ![]() se poate determina
expresia corespunzatoare cuplului maxim.
se poate determina
expresia corespunzatoare cuplului maxim.
 (1.24)
(1.24)
Cuplul de pornire se determina punand conditia s=1 in relatia (1.20).
![]() (1.25)
(1.25)
In figura 1.5 este reprezentata caracteristica mecanica a masinii
de inductie, functionand in regim de MOTOR, corespunzatoare domeniului de
variatie a alunecarii ![]() si prelungirea
acesteia la alunecari mai mari ca 1 (
si prelungirea
acesteia la alunecari mai mari ca 1 (![]() ) in regim de FRANA.Pentru cazul
) in regim de FRANA.Pentru cazul ![]() avem regimul de
functionare ca GENERATOR.
avem regimul de
functionare ca GENERATOR.
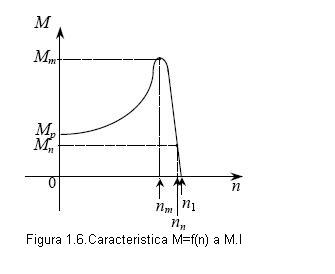
Caracteristica mecanica a masinii asincrone sub forma ![]() este reprezentata in figura urmatoare:
este reprezentata in figura urmatoare:
O marime mult utilizata in aplicatii legate de motorul asincron este factorul de supraincarcare (de suprasarcina), definit ca raport intre cuplul maxim si cuplul nominal:
![]() (1.26)
(1.26)
Pe baza relatiilor anterioare si in conditiile unor simplificari bazate pe diferente intre ordinele de marime uzuale ale parametrilor masinii (valabile mai ales la masini asincrone deputeri mari) se poate deduce [B, 1] o expresie foarte utila in calcule, asa numita formula a lui Kloss, care stabileste legatura, pe caracteristica mecanica, dintre cuplul maxim si cuplul la o sarcina oarecare.
 (1.27)
(1.27)
Relatia de mai sus se poate particulariza la punctual nominal ![]() sau la pornire
sau la pornire ![]() permitand determinarea
cuplului de pornire al motorului.
permitand determinarea
cuplului de pornire al motorului.
Dupa cum se observa si dupa expresia analitica a cuplului electromagnetic forma caracteristicii poate fi influentata, la o masina cu o anumita constructie (deci cu parametrii considerati constanti), de variatia tensiunii de alimentare U1, de variatia frecventei f1 si de suplimentarea rezistentei rotorice R2, prin inserierea cu infasurare rotorica a unui reostat Rr (la masina cu rotor bobinat).
Caracteristicile mecanice la diverse valori ale tensiunii de alimentare (U1 < U1n), cat si la diverse valori ale rezistentei inseriate cu infasurarea rotorica (R2 + Rr, Rr > 0), sunt reprezentate calitativ in figura de mai jos.
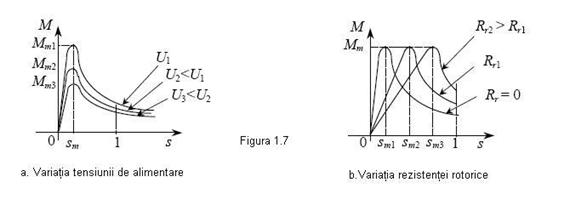
Dupa cum se observa,variatia
tensiunii U1 nu afecteaza alunecarea critica sm, dar cuplul maxim
Mm (ca de altfel orice valoare a cuplului) variaza direct proportional
cu ![]() .
.
Cresterea rezistentei rotorice nu afecteaza valoarea cuplului
maxim, dar mareste alunecarea critica, deplasand valoarea cuplului maxim spre alunecari mari, si marind astfel si valoarea cuplului de pornire.
1.2.3.Scheme echivalente ale masinii de inductie
Schema electrica echivalenta reprezentata in figura de mai jos poarta denumirea de schema in T a masinii asincrone. In teoria masinii asincrone este utilizata de multe ori si schema in Γ,numita si schema 'cu circuitul de magnetizare scos la borne'.
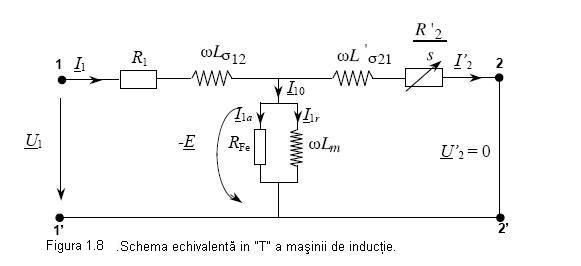
In figura de mai sus este reprezentata schema electrica echivalenta in "T" pe o faza reprezentativa.
Alte scheme echivalente sunt reprezentate
in figura urmatoare: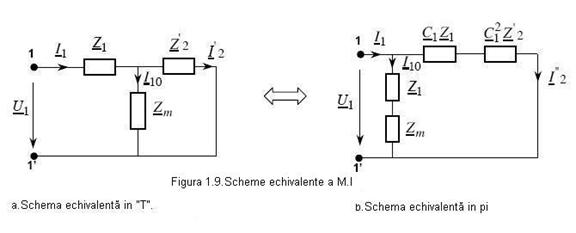
Ecuatiile aferente schemei in "T" ale masinii de inductie se scriu dupa cum urmeaza:
![]()
![]()
![]() (1.28)
(1.28)
![]()
![]()
![]() (1.29)
(1.29)
Relatia de echivalenta intre cele 2 scheme se scrie:

![]() (1.30)
(1.30)
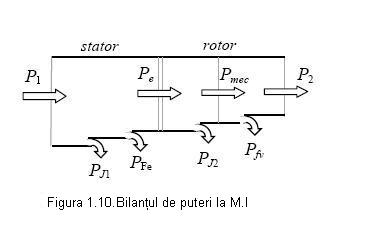
1.2.4.Bilantul de puteri si randamentul motorului asincron
In regimul de motor, masina are infasurarea statorica (inductoare) conectata la reteaua de alimentare si absoarbe puterea electrica activa:
![]() (1.31)
(1.31)
unde ![]() si
si ![]() sunt marimile de faza
in valori efective,caracteristice fazei reprezentative, iar
sunt marimile de faza
in valori efective,caracteristice fazei reprezentative, iar ![]() este factorul de
putere in circuitul
este factorul de
putere in circuitul
statoric.La trecerea curentului prin infasurarea statorica, cu rezistenta de faza ![]() vor aparea pierderi de
tip Joule:
vor aparea pierderi de
tip Joule:
![]() (1.32)
(1.32)
Datorita curentului variabil, in timp se vor produce pierderi
prin curenti turbionari, si prin
histerezis.Puterea ce se transmite
rotorului, se numeste putere electromagnetica, si se poate exprima:
![]() (1.33)
(1.33)
In rotor se produc pierderi Joule in infasurari:
![]() (1.39)
(1.39)
Pierderile in fier in rotor sunt neglijabile in zona de functionare a turatiilor mari (de la mers in gol la regim nominal),deoarece frecventa curentilor din circuitul rotoric f2 = (1.3) Hz este foarte redusa.
Mai apar pierderi mecanice, datorita frecarilor din lagare si ventilatiei Pfv, iar puterea utila, de natura mecanica la nivelul arborelui, are expresia:
![]() (1.40)
(1.40)
Bilantul puterilor masinii de inductie este reprezentat in figura urmatoare:
In acest caz, randamentul motorului asincron se scrie:
![]() (1.41)
(1.41)
In cazul motorului de inductie trifazat, la intrare avem P1-electric, si la arbore avem P2- mecanic.
Randamentul se scrie:
 (1.42)
(1.42)
Uzual, pentru puteri medii (10...100)KW,
randamentul este de 85..92%.
In ceea ce priveste randamentul(pierderile), se poate face referire la 4 metode de baza:
separarea pierderilor
incarcarea directa si artificiala
incarcarea recuparativa
metoda calorimetrica
Copyright © 2025 - Toate drepturile rezervate