|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
COMANDA FUZZY
Comanda fuzzy este aplicatia cea mai utilizata de logica fuzzy. Ea consta in inlocuirea algoritmelor de reglaj conventional cu reguli lingvistice de tipul -DACA masina din fata este aproape SI eu merg cu viteza, ATUNCI trebuie sa franez rapid. Obtinem astfel un algoritm lingvistic care se conduce singur mai bine decat cu metodele traditionale de control a procesului.
Trecem acum la repartizarea in subansamble fuzzy de diferite universuri de discurs ce le impune sistemul. Determinam baza de reguli ce va caracteriza functionarea sistemului. Apoi este necesara transformarea variabilelor reale in variabile fuzzy.
Aceasta este etapa de fuzificare. Utilizam acum variabilele fuzzy in mecanismul de inferenta ce creeaza si determina variabilele fuzzy de iesire ce utilizeaza operatiile cu functiile de apartenenta.
In cele din urma intervine procesul de defuzificare, care consta in extragerea unei valori reale de iesire plecand de la functia de apartenenta a subansamblului fuzzy de iesire stabilit de mecanismului de inferenta.
1 SCHEMA DE PRINCIPIU A UNUI CONTROL FUZZY
Fig.16
2 Fuzificarea si defuzificarea informatiei.
Sistemele fuzzy prelucreaza informatia dupa o filozofie proprie, care principial se desfasoara conform fluxului urmator:
![]() variabile de intrare
variabile de intrare![]()
![]() ( fuzzificare)
( fuzzificare)![]() ( inferente)
( inferente) ![]() ( compunere)
( compunere) ![]() (defuzificare)
(defuzificare)![]()
Fiecare veriga a lantului de prelucrare poatte fi realizata prin diferite tehnici si procedee consacrate in literatura de specialitate.Unele metode dau rezultate mai bune decat altele, fapt confirmat in aplicatii.
a) Fuzificare
Aceasta operatie se efectueaza prin aplicarea functiilor de apartenenta corespunzatoare pentru fiecare variabila de intrare in parte, in urma careia acesteia i se asociaza o multime (vector) avand ca elemente gradele de apartenenta la multimile fuzzy, definite pe domeniul sau de existenta.
b) Inferenta si compunerea regulilor
La oricare moment de timp t algoritmul fuzzy activeaza regulile din cadrul BRF ( ca un proces paralel).Iesirea fiecarei reguli este (tot) o valoare fuzzy , care rezulta pe baza operatiilor fundamentale din logica fuzzy. Astfel, fiecare regula din cadrul BRF reprezinta o expresie logica construita cu operatorul de conjunctie logica SI.Prin urmare , se aplica operatia de intersectie a multimilor fuzzy, in urma careia la iesire se obtine un minim punctual al functiilor de apartenenta de pe intregul domeniu de definitie al variabilelor de iesire.
c) Defuzificare
Aceasta operatie consta in extragera unei valori scalare deterministe din informatia fuzzy asociata variabilei de iesire, sub forma unei multimi fuzzy O.In general defuzificarea este optionala, in functie de natura aplicatiei, esenta ei fiind de a furniza explicit valoarea cea mai potrivita pentru variabila de iesire.
Exista doua metode de defuzificare diferentiate de principiul de lucru si de eficacitate.Metoda cea mai utilizata si care ofera cele mai consistente rezultate [10] este metoda centrului de greutate(centroid).
Potrivit acesteia, marimea semnificativa a variabilei de iesire vk se calculeaza ca fiind valoarea coordonatei centrului de greutate yCG al domeniului plan, desemnat de multimea fuzzy O pe axa reala y, ce defineste domeniul de definitie a variabilei de iesire respective, adica:
vk= ,
,
unde limitele de integgrare corespund la intregul univers de discurs al variabilei y.Pentru cazul discret, consider-nd domeniul de definitie Y al variabilei de iesire esantionat in s valori Y=, se poate scrie:
vk= .
.
3 Tehnici de defuzificare
Pentru defuzuficare, avem la dispozitie mai multe metode, insa cele mai folosite sunt : Mamdani si Sugeno.
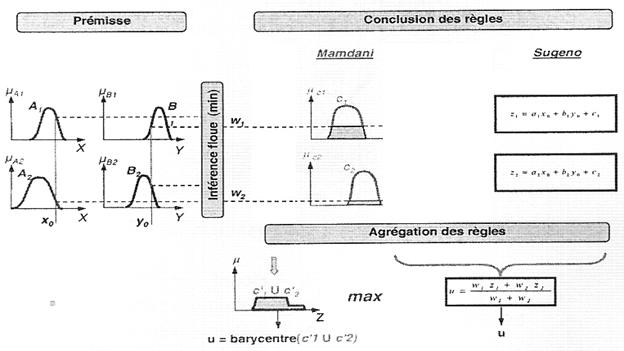
Fig.17
Avantajele metodei Mamdani:
-este intuitiva ;
-este acceptata in multe aplicatii;
-este bine adaptata rationamentului uman.
Avantajele metodei Sugeno:
-este eficace d.p.d.v. informational;
-functioneaza bine cu tehnici liniare;
-functioneaza bine cu optimizarea si tehnici adaptive;
-garanteaza continuitatea suprafetei de randament;
-este bine adaptata analizei matematice.
4 Mecanismul de adaptare a bazei de reguli fuzzy (MABRF).
O BRF adaptiva (BRFA) reprezinta un sistem de reguli fuzzy dependent de context, deci cu variabilitate in timp.
Elementele BRF care pot fi supuse adaptarii se refera la dimensiunea acesteia, definita prin numarul de reguli fuzzy ce o compun, si la coeficientii de pondere ai fiecarei reguli.
Dimensiunea BRF depinde de numarul
multimior fuzzy, stabilit pentru
fiecare variabila de intrare, si de numarul acestor
variabile.Desigur este esential ca numarul regulilor de control fuzzy
sa fie minim in conditiile pastrarii nealterate a puterii
de decizie a sistemului.Procedeul de baza al MABRF consta in
modificarea ponderilor atasate regulior. Aceste ponderi constituie
factorii cu care se multiplica diferite premise de adevar ale
regulilor fuzzy in procesulde adaptare a sistemului. Ele sunt valori reale, wi![]() [0,2), avand initial valoarea 1. Prin procese de
invatare supervizata , ponderile se modifica dupa un
mecanism ce va conduce la amplificarea regulilor care contribuie esential
la determinarea regiunii fuzzy de raspuns si la diminuarea
celorlalte. Cu alte cuvinte, MABRF amplifica regulile situate in
vecinatatea regiunii care contine cele mai frecvente valori ale
variabilelor de intrare. Amplificarea ponderilor implica o adaptare a
sistemului la modificari ce apar in regiunea centrala
(esentiala) de control.
[0,2), avand initial valoarea 1. Prin procese de
invatare supervizata , ponderile se modifica dupa un
mecanism ce va conduce la amplificarea regulilor care contribuie esential
la determinarea regiunii fuzzy de raspuns si la diminuarea
celorlalte. Cu alte cuvinte, MABRF amplifica regulile situate in
vecinatatea regiunii care contine cele mai frecvente valori ale
variabilelor de intrare. Amplificarea ponderilor implica o adaptare a
sistemului la modificari ce apar in regiunea centrala
(esentiala) de control.
Presupunand ca frecventele de utlizare a regulilor sunt ki cu i=1, . ,r, exista o relatie de ordine oarecare intre acestea:
k1≥k2≥ . ≥kr.
Numarul total de apelari ale regulilor este k1 + . +kr = k, iar schema de calcul a ponderilor de adaptare a regulilor din BRF este simpla:
![]() i/k .
i/k .
Acest procedeu este considerat ca o modalitate de generare a BRFA prin invatare (antrenare ) pe baza metodei spatiului intersectiilor intrari -iesiri reunite.
In mod uzual, pentru construirea BRFA se utilizeaza asa-numita tehinica de invatare competitiv diferentiala (DCL).
Principial exista o apropiere intre DCL si algoritmul de propagare inapoi, specific antrenarii retelelor neuronale . Aplicarea DCL in cadrul MABRF se bazeaza, in fond, pe invatarea (antrenarea) sistemului fuzzy prin simularea unor situatii de lucru. Pornind de la o BRF initiala, se alege un numar de vectori pentru antrenare in spatiul intersectiilor intrari-iesiri reunite.
Mecanismul de estimare a BRF pe baza tehnicii DCL este consacrat in literatura de specialitate ca metoda de adaptare a sistemelor fuzzy prin invatare (antrenare).Scopul acesteia este ca la sfarsitul perioadei de antrenare sa se obtina o suprafata de control a sistemului fuzzy , care sa confere cea mai mica eroare medie patratica a raspunsului, in diferite situatii.
Problema adaptarii in timp real prin tehnici de invatare suporta unele discutii.In primul rand este evident ca procesul de invatare se face pe baza situatiilor anterioare, in general sistemele autoinstruibile fiind sisteme cu memorie.Prin urmare, in cadrul procesului de adaptare pot fi realizate in timp real doar operatiile de identificare, decizie modificare a parametrilor de adaptare.In schimb, modelul de adaptare propriu-zis nu este disponibil instantaneu, fiind necesara cel putin experienta anterioara, care poate fi furnizata sistemului pe trei cai:
implementarea apriorica a cunostintelor unui expert "absolut";
instruirea sistemului prin situatii ipotetice (pe date sintetice de simulare);
antrenarea in situatii reale.
In realitate nici una din aceste variante nu se foloseste independent. Realizarea oricarui sistem de control trece printr-un ciclu compus din cele trei verigi, in proportii diferite, pe baza specificatiilor produsului.
In cazul sistemului cu model fuzzy, cele trei etape constituie, de fapt, logica algoritmului de prelucrare euristica a cunostintelor.
5 Schema unui motor serie :
Fig.18
Asociem parametrilor fizici urmatoarele valori :
·Ke =0.5 in Nm/A (constanta motorului) ;
·Kt=10 in Nm/A (constanta armaturii) ;
·R=1 in Ω (rezistenta rotor + stator) ;
·L=0.5 in H (inductanta proprie a motorului) ;
·b=0.1 in Ns/m (coeficientul unghiular de amortizare) ;
·J=0.01 in kgm² (momentul de inertie a rotorului) :
·Γ(t)=cuplul exterior.
Cuplul motor, T, este proportional cu curentul din armaturi, I, si un factor constant Kt. Forta contra-electromotoare E este data de viteza de rotatie in urmatoarele ecuatii:
T=Kt·I
E=Ke·dθ/dt
Acest sistem va fi modelat adunand cuplurile ce actioneaza asupra inertiei rotorului si integrand acceleratia pentru a exprima viteza. De altfel, legile lui Kirchoff vor fi aplicate pentru circuitul urmator.
Integralele acceleratiei de rotatie si totalul schimbarilor curentului in armatura sunt date in ecuatiile urmatoare:
∫d²θ/dt²= dθ/dt
∫di/dt=i
Legile lui Newton si a lui Kirchoff sunt aplicate sistemului dupa ecuatiile:
J(d²θ/dt²)=T-b(dθ/dt)-Γ(t)=>d²θ/dt²=1/J(Kti-b(dθ/dt)-Γ(t))
L(di/dt)=-Ri+V-E=>di/dt=1/L(-Ri+V-Ke(dθ/dt))
6 Schema in Simulink va fi :
Fig.19
Rezultatul simularii este prezentat in figura urmatoare: viteza unghiulara in rp/m si intensitatea motorului in functie de timp.
Fig.20 : Motorul serie alimentat 220V fara control
Apoi, simularea motorului serie cu control PID. Schema controlului in Simulink este prezentata in fig.21. Apoi, rezultatul simularii.
Fig.21 : Schema in Simulink cu control PID
Fig.22 : Motorul serie: Viteza unghiulara-Intensitatea-Cuplul exterior
7 Schema Controlului Fuzzy :
Fig.23 : Schema in Simulink cu Control Fuzzy
8 Rezultatul simularii :
Fig.24 : Motorul serie: Viteza unghiulara-Intensitatea-Cuplul exterior
9 Reprezentarea grafica a centroidului :
Fig.25
CAPITOLUL IV
Concluzii
In acest studiu al motorului serie am remarcat un singur inconvenient: controlul dificil al vitezei de rotatie, care nu poate fi mentinut usor la o valoare data fara un control adaptat. Am vazut in schema fara control a motorului simplu faptul ca nu avem o viteza de rotatie constanta. Pentru aceasta am introdus un control proportional-integrativ-derivativ care mentine viteza de rotatie la valoarea impusa.
Dupa controlul PID am introdus Controlul Fuzzy care mentine si el viteza de rotatie impusa, iar atunci cand cuplul exterior este aplicat pentru a diminua viteza de rotatie, controlul fuzzy actioneaza asupra motorului si restabileste valoarea vitezei de rotatie.
Logica Fuzzy nu este o solutie pentru toate problemele. Cand nu trebuie sa folosim Logica Fuzzy? Daca gasim o solutie mai usoara sau avem deja o solutie mai simpla trebuie sa o folosim. Logica Fuzzy este o codificare a bunului simt- folosim bunul simt cand utilizam Logica Fuzzy si vom face alegerea corecta. Multe aplicatii nu au nevoie de Logica Fuzzy. Totusi, daca nu ne grabim si ne familiarizam putin Logica Fuzzy, vom vedea ca ea poate fi o solutie simpla si eficace impotriva impreciziei si nonliniaritatii.
Bibliografie
Copyright © 2025 - Toate drepturile rezervate