|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
 Universitatea Politehnica din
Universitatea Politehnica din
Facultatea de Electrotehnica
Embedded Systems for Automotive
Referat de LABORATOR
AUTOMATIC TRANSMITTION CONTROL
Modelarea Controllerului la o transmisie automata
1.Introducere
Modelul descrie sistemul unui model automat de transmisie de tip "drivetrain".Motorul, vehicolul si transmisia sunt simulate(modelate) in MATLAB.Datele de intrare se dau cu ajutorul unui generator de semnale.Fiecare marime de iesire, este ilustrata prin prisma unor algoritmi de reglare, bazandu-se desigur pe datele de intrare generate de generatoarele de semnal.
Modelul de baza dupa care se fac modelarile este descris in figura de mai jos:
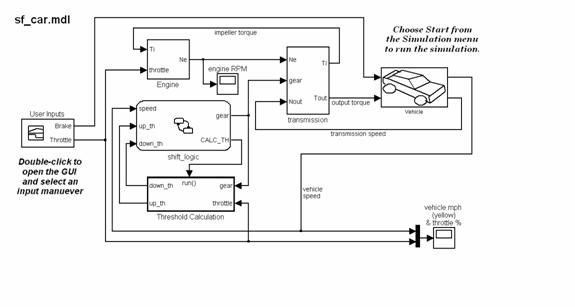
Cu privire la modelul descris mai sus putem afirma ca:
La blocul de "User Inputs", ca si marimi de intrare avem :Traseul si Frana.Pentru a putea genera aceste marimi, este nevoie de un demultiplexor, bloc subordonat blocului de "User Imputs".Acest bloc de User Inputs dupa cum se poate observa este direct legat de modelul masinii(autovehicolului).
Blocul care contine datele aferente Vehicolului este descris de urmatoarele marimi: cuplul de iesire de trasmisie de arborele motor, cuplul de franare, momentul de inertie al vehicolului,viteza rotilor,viteza liniara,coeficientul de incarcare al suprafetei de miscare.Ca si marimi de iesire ( ce se poate urmari si pe blocul de Scope este viteza calculata in Mile /ora cat si traseul.Viteza rotilor este trecuta printr-un bloc integrator 1/s rezultand viteza liniara cat si transmisia vitezei de iesire.Cuplul de franare cat si sarcina suprafetei de miscare ( a soselei) este sunt trecute printr-un bloc sumator rezultand sarcina - signed load.Toate aceste lucruri sunt determinate si de ecuatia de miscare a vehicolului.Cuplul
activ
este descries de cuplul motorului, aflat la arborele motor, cuplul rezistiv
fiind sarcina suprafetei de rulare.
Blocul de comanda aferent motorului
Subsistemul de reglare pentru transmisie
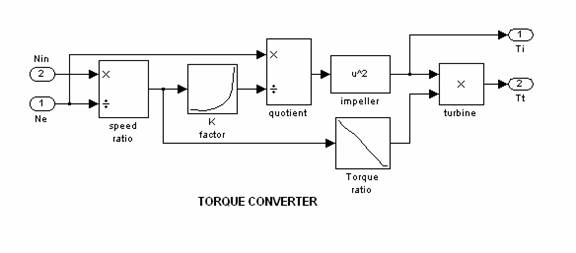
In cazul blocului de reglare a transmisiei principalele marimi de intrare sunt:Ne aduca viteza motorului,gear( directia) si Nout adica viteza de transmisie.
Acesta din urma este o marime de reactie, care intra in blocul de reglare.Sistemul propriuzis contine urmatoarele blocuri importante: convertor de cuplu ( Torque Converter),si raportul de transmisie ( Transmittion Ratio).Deasemenea facand dublu click pe blocul de convertor de cuplu ( torque converter) se deschide fereastra de mai jos
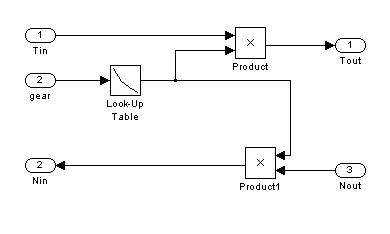
Deasemenea
accesand blocul de Transmittion Gear Ratio, vom avea figura de mai jos:
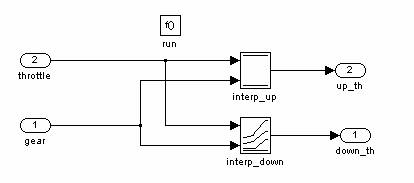
Subsistemul Threshold Calculation
Descrierea subsistemului este facuta in figura de mai jos:
Subsistemul Shift Logic
Blocul stateflow cu eticheta ShiftLogic pune in aplicare uneltele de selectie pentru transmitere. Double clock on ShiftLogic in the model window to open the Stateflow diagram. Dublu click pe ShiftLogic in model, pentru a deschide fereastra diagramei Stateflow. The Stateflow Explorer is utilized to define the inputs as throttle and vehicle speed and the output as the desired gear number.Stateflow Explorer este utilizata pentru a defini factorii de productie si de acceleratie ca vehicul de viteza, precum si de iesire dorita ca numarul uneltelor. Two dashed AND states keep track of the gear state and the state of the gear selection process.The overall chart is executed as a discrete-time system, sampled every 40 milliseconds.Diagrama Stateflow este prezentata in model ilustrand functionalitatea blocului
Diagramale aferente miscarii se pot observa ruland modelul matlab pentru acest sistem.
FOARTE IMPORTANT!!!
OBS : Comantarea acestui model Matlab, pleaca de la faptul ca modelul a fost deschis cu Matlab 6.5.Verificarile cu versiunea demo din Matlab 2007 ( cel instalat la retea au fost facute.Marimile cat si blocurile si subsistemele coincid in proportie de 99%.
Copyright © 2025 - Toate drepturile rezervate