|







 |  |
|
| |
 | Biologie | Chimie | Didactica | Fizica | Geografie | Informatica |
| Istorie | Literatura | Matematica | Psihologie |
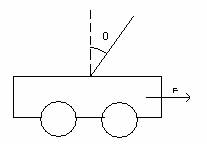
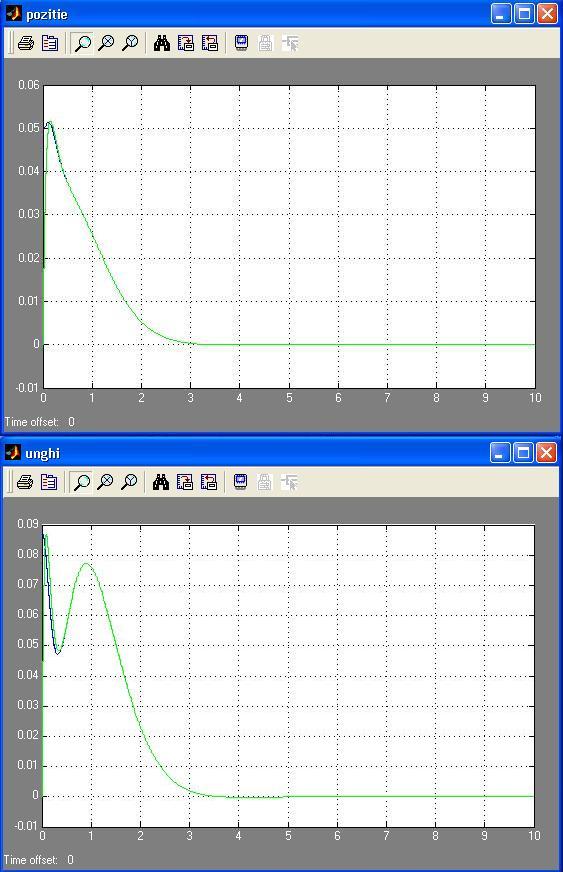
Pendulul invers


Cerinte:
>> A=[0 1 0 0; 0 -40 -20 0; 0 0 0 1; 0 25 17 0];
>> B=[ 0 7 0 -12]';
>> C=[1 0 0 0; 0 0 1 0];
>> D=zeros(2,1);
>> sys=ss(A,B,C,D);
>> H=tf(sys)
Transfer function from input to output
7 s^2 + 1.158e-014 s + 121
#1: ----- ----- --------- ----- -----
s^4 + 40 s^3 - 17 s^2 - 180 s
-12 s - 305
#2: ----- ----- ----- ----- -----
s^3 + 40 s^2 - 17 s - 180
>>
>> H_z=c2d(H,0.01,'zoh')
Transfer function from input to output
0.0003077 z^3 - 0.0003456 z^2 - 0.0002305 z + 0.0002694
#1: -------- ----- ------ ----- ----- ------------
z^4 - 3.672 z^3 + 5.014 z^2 - 3.012 z + 0.6703
-0.0005736 z^2 - 0.0001017 z + 0.0004239
#2: -------- ----- ------ -------
z^3 - 2.672 z^2 + 2.342 z - 0.6703
Sampling time: 0.01
>> sys_z=c2d(sys,0.01,'zoh');
>> Ad=sys_z.a
Ad =
1.0000 0.0082 -0.0009 -0.0000
0 0.6703 -0.1649 -0.0009
0 0.0011 1.0008 0.0100
0 0.2061 0.1481 1.0008
>> Bd=sys_z.b
Bd =
0.0003
0.0577
>> K=place(Ad,Bd,[0.67 0.96 0.98+j*0.01 0.98-j*0.01])
K =
6.6171 -0.3514 -3.5253 -0.8726
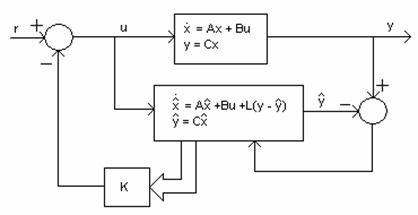
Cat este L a.i. polii estimati sunt ![]()
>> Cd=sys_z.c
Cd =
1 0 0 0
0 0 1 0
>> L=place(Ad', Cd', [0.5 0.8 0.85+0.05*j 0.85-0.05*j]')'
L =
0.3083 -0.0708
0.0578 2.5542
Copyright © 2024 - Toate drepturile rezervate