|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
STUDIU DOCUMENTAR PRIVIND CONSTRUCTIA ROBOTILOR INDUSTRIALI
1.1. CONSIDERATII GENERALE ASUPRA ROBOTILOR INDUSTRIALI.
1.1.1. Caracteristici tehnice generale.
Robotii industriali sunt sisteme generale electro-pneumo-hidro-mecanice, dotate cu mai multe grade de libertate capabile sa execute, autonom si automat, operatii de manipulare sub controlul unui sistem de comanda echipat cu o memorie programabila.
Principalele caracteristici ale robotilor industriali:
- sunt realizati pentru a executa in principal operatii de manipulare, deplasare si transportare care necesita viteza si exacitate, dar pentru forte limitate;
- sunt dotati cu mai multa grade de libertate (intre 2 si 6), astfel incat sa poata executa operatii complexe, fiecare miscare fiind controlata de unitatea de conducere;
- sunt autonomi, functionand fara interventie sistematica a operatorului uman;
- sunt dotati cu o momorie reprogramabila, capabila sa conduca o aparatura pentru executarea unor operatii care pot fi schimbate prin modificarea programului initial;
- sunt dotati cu o capacitate logica in general foarte redusa cu ajutorul careia pot executa incercari si pot alege intre doua alternative, precum si a schimba semnale de aprobare cu alte aparaturi.
Caracteristicile tehnice ale robotilor industriali includ: dimensiuni, valorile deplasarilor realizabile, precizia, rentabilitatea, numarul de grade de libertate, timpul de actionare, greutatea robotului, volumul spatiului de lucru, capacitatea sistemului de comanda si control, viteza, sarcina transportbila, conditiile de lucru, posibilitatea de a dispune de mai multe brate de lucru, etc.
Performantele robotilor industriali pot fi apreciate cu ajutorul parametrilor globali, definiti dupa cum urmeaza:
Parametru global K1:
![]() ;
;
caracterizeaza robotul industrial din punct de vedere al eficientei sale de interventie in mediul industiral si al supletei sale; prin greutate de servici se intelege greutatea robotului industrial in conditii de functionare (de exemplu, inclusiv greutatea fluidului de actionare).
Parametru global K2 :
![]() ;
;
caracterizeaza robotul industrial din punct de vedere al capacitatii gravitationale specifice de manipulare.
Parametru global K3 :
 ;
;
caracterizeaza calitatile tehnice ale robotului industrial, acesta fiind cu atat mai bun cu cat K3 este mai mare.
Pe baza analizei parametrilor constructivi si a domeniului de utilizare a robotilor industriali, s-au stabilit pentru acestia urmatoarele caracteristici:
a) Capacitatea de ridicare, reprezinta marimea masei maxime pe care o poate apuca si mentine in orice pozitie mana robotului industrial; in prezent se fabrica manipulatoare si roboti industriali care au capacitati de ridicare, de exemplu, dispuse in serie geometrica cu φ = 2, cuprinse in gramele: 0,004÷0,064; 1,25÷160; 250÷1000kg sau chiar mai mult. Metodele cele mai uzuale au capacitatea de ridicare cuprinsa intre 10 si 160kg.
b) Numarul gradelor de libertate este numarul posibilitatilor de miscare a mainii robotului industrial fara a lua in considerare deplasarea falcilor mainii pentru strangere si desfacere. Numarul gradelor de libertate se stabileste constructiv si trebuie sa fie minimul necesar pentru a corespunde destinatiei robotului.
c) Zona de lucru este spatiul in care in timpul functionarii se gasesc mecanismele de executie ale robotului; aceasta este caracterizata de:
- volumul de lucru, adica volumul maxim in care se poate gasi mana robotului industrial in timpul functionarii;
- volumul de lucru util care reprezinta volumul corespunzator spatiului in care mana realizeaza un lucru mecanic util in concordanta cu
programul robotului.Acest volum se schimba in functie de forma si masa piesei, precum si de pozitia in care aceasta trebuie deplasata da catre robot;
- raza maxima de deservire, reprezintand distanta cea mai mare de la axa de simetrie a corpului robotului pana la axa mainii in pozitia in care este inca posibila apucarea si mentinerea piesei de masa maxima.
d) Gradul de mobilitate a robotului se determina ca fiind capacitatea acesteia de a executa deplasari locale, regionale si globale. Deplasarea locala este considerata miscarea mainii pentru aducerea piesei manipulate in pozitia necesara. Deplasarea regionala a mainii se realizeaza in limitele pozitiei de lucru a robotului si este determinata de raza maxima de deservire. Deplasarea globala se realizeaza pe distante
care depasesc raza maxima de deservire, in cazul cand este necesara de exemplu deplasarea robotului da la o masina-unealta la alta.
In functie de gradul de mobilitate, robotii industriali se impart in doua grupe:
- roboti stationari, care realizeaza deplasari locale si regionale ale mainii;
roboti mobili, care executa toate cele trei deplasari.
e) Schema cinematica structurala, determina posibilitatile cinematice si functionale ale robotilor industriali.
Analiza schemei cinematice structurale se face in functie de sistemul de coordonate (cartezian, cilindric, sferic) in care se deplaseaza mana mecanica a robotului. Alegerea schemei cinematice structurale este de terminata de particularitatile constructive si tehnologice ale masinii sau utilajului tehnologic pe care il deserveste robotul, precum si forma si dimensiunile piesei manipulate.
Cinematica manipulatoarelor si robotilor induistriali influenteaza asupra constructiei si posibilitatilor functionale. Analiza cinematicii robotilor industriali se face dupa numarul gradelor de libertate, tipul miscarilor (translatie sau rotatie) si suscesiunea acestora.
Numarul gradelor de libertate ale unui robot determina o mare varietate de variante posibile de scheme cinematice structurale, ceea ce ingreuneaza alegerea schemei cinematice structurale optime. Nu toate variantele teoretice posibile sunt analoage din punct de vedere constructiv, iar altele nu prezinta interes.
Pentru alegerea tipurilor de variante si a schemei cinematice structurale utilizabile ale robotului se folosesc notiunile de varianta constructiva si respectiv, de varianta cinematica. Variantele constructive se deosebesc intre ele prin cuplele cinematice (cuple de ordinul III,IV,V), prin dispunerea lor relativa si prin tipul de miscare realizata, adica prin acei indici care caracterizeza constructia robotului.
Numarul variantelor constructive se determina cu relatia:
![]() , in care:
, in care:
- Nt= NIII+NIV+NV - este numarul total de cuple folosite la constructia robotului;
- NIII,NIV,NV - este numarul cuplelelor cinematice corespunzatoare claselor III,IV,V.
Primul factor al acestei expresii determina varinatele constructive care se deosebesc intre ele numai printipul cuplei cinematice si prin
dispunerea lor relativa, iar al doilea factor determina traiectoria miscarii, translatie T sau rotatie R, folosita in cuplele de clasa a V-a .
In practicase folosesc in mod frecvent rosi cu cuple cinematice de clasa a V-a si in consecinta, cele prezentate in continuare se refera la aceste scheme cinematice structurale de roboti.
Pentru robotii cu o singura mana mecanica, numarul variantelor constructive este m=2N in care N este numarul gradelor de libertate ale robotului (pentru simplificarea notateiei prin N se va intelege NV). Fiecare varianta constructiva are o serie de variante cinematice structurale. Variantele cinematice structurale se deosebesc intre ele doar prin directia miscarii dupa diferite grade de libertate fara modificarea classei, tipului si pozitiei lor in schema de ansamble a robotului.
Pentru stabilirea tuturor variantelor cinematice structurale posibile
este necesar sa se ia in considerare modul de realizare a
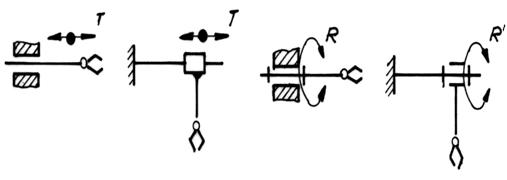
miscarilor de translatie si de rotatie (figura 1.1).
Miscarea de translatie se poate realiza cu bratul drept (notata pe
figura cu T) sau cu bratul indoit (T'), in timp ce
miscarea de rotatie poate sa aiba axa de rotatie
coaxila (R); daca directiile acestor miscari coincid
cu axele sistemului cartezian de referinta (conditie care duce
la realizarea zonei de lucru maxime), atunci fiecare miscare
urmatoare (sau precedenta) in raport cu precedenta (sau urmatoarea) poate fi paralela
(II), perpenticulara (┴), sau incrucisata (X).
Avand in vedere acestea, fiecarei variante constructive ii corespunde nN=2N.3N-1 variante cinematice structurale; inaceasta expresie factrul 2N
exprima diversitatea variantelor in functie de caracterul miscarilor de translatie si de rotatie, iar factorul 3N-1 determina varinatele in functie de directia lor de miscare relativa.
De exemplu, roboul cu doua grade de libertate (N=2) are patru (m2 ) variante constructive (TT, TR, RT, RR), fiecareia din acestea corespunzandu-i 12(n2 variante cinematice structurale. Totusi, din 4*12=48 variante teoretice posibile, tipice sunt numai 15, aceste variante se deosebesc intre ele prin realizarea constructiva, forma zonei de lucru si modul de generare a acesteia.
Zona de lucru, sub forma unor suprafete diferite, determina numai 9 variante care sunt considerate ca fiind cele mai utilizabile.
Robotii cu trei grade de libertate au 8 (m3=23=8) varinate consecutive; acest numar de variante se poate obtine ca rezultat al introducerii unei miscari de rotatie sau de ranslatie la variantele constructive ale robotilor cu doua grade de libertate.
Pentru usurinta analizei alegerii corecte a cinmaticii, robotii se pot imparti in trei grupe cinematice care se deosebesc intre ele dupa rolul functional, cinematica batiului, cinematica bratului, cinematica articulatiilor.
f) Cinematica batiului. Gradele de libertate ale miscarilor care asigura deplasarea robotului, adica deplasarea batiului sau, caracterizeaza cinematica batiului. Avand in vedere destinatia functionala cat si exemplele de constructii de roboti existenti, se considera ca este suficient daca batiul are un singur grad de libertate caracteristic zonei de lucru sau sistemului de deplasare (de exemplu, pentru deplasarea robotului de la o masina-unealta la alta).
g) Cinematica bratului. Gradele de libertate ale
miscarilor care asigura
deplasarea spatiala a mainii mecanice pentru un batiu nedeplasabil
caracterizeaza cinematica bratului robotului. Schema cinematica
structurala care realizeaza
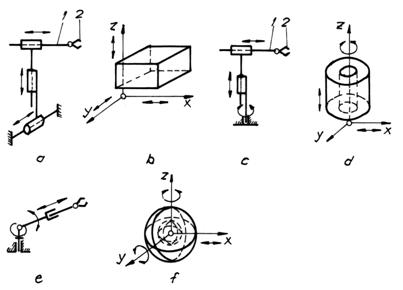
trei deplasari rectilinii alternative (figura 1.2a) asigura
deplasarea bratului 1 cu mana mecanica 2 intr-un sistem de coordonate
carteziene (figura 1.2). Avantajul acestei scheme cinematice structurale
consta in aceea ca in timpul deplasarii piesa manipulata
isi pastreaza orientarea.Schema cinematica structurala
care realizeaza 2 miscari rectilinii alternative si una de
rotatie (figura 1.2c) asigura deplasarea piesei in coordonatele
cilindrice (figura 1.2d). Pentru o schema cinematica structurala
a bratului cu doua miscari de rotatie si una de translatie (figura 1.2e)
robotul deplaseaza piesaaa in coordonate sferice (figura 1.2f).
Figura 1.2
In figura 1.3 sunt indicate schemele cinematice structurale posibile ale bratului cu 3 grade de libertate. Fiecare varianta este insotita si de volumul de lucru deservit de robot. In limitele acestui volum, bratul robotului poate pozitiona articulatia in orice punct. Este evident ca la
modificarea raportului intre marimile elementeleor ce compun cuplele cinematice si ale unghiurilor dintre axele cuplelor cinematice, dimensiunile si configuratia volumului de lucru se schimba.
In cazul proiectarii mecanismelor bratului apar conditii restrictive privind valorile vitezelor unghiulare si liniare in cuplele cinematice care au drept consecinta delimitarea unor zone in volumul teoretic de lucru in care nu poate fi pozitionata articulatia robotului. Se observa in figura 1.3 ca variantele constructive ale bratului nu se deosebesc numai prin configuratia volumului de lucru ci si prin prezenta (absenta) duritatii. Prin duritate se intelege ca fiecarei pozitii a punctului extrem al lantului cinematic ii corespund 2 configurari realizate de liniile "osaturii" bratului (sunt indicate cu asterisc).
Dualitatea permite bratului robotului sa se deplaseze in "zona umbrita" a obiectelor si a obstacolelor. Aceste proprietati le au laturile cinematice compuse din 2 cuple cinematice de rotatie cu axe paralele sau cuple cinematice de translatie si de rotatie cu axe perpenticulare deoarece cupla de translatie precede pe cea de rotatie.
Cele mai raspandite variante constructive de brate de roboti sunt cele ale robotilor VERSATRAN si UNIMATE prezentati in figura 3 cu linie ingrosata. Este interesant de remarcat ca aceste scheme cinematice nu au dualitate, la constructia lor avandu-se in vedere asigurarea unei rigiditati cat mai bune.
In afara de aceste scheme cinematice structurale cu 3 grade de libertate ale bratului exista si altele care se obtin prin reunirea diferitelor tipuri de miscari ale mecanismelor de executie ale robotilor (figura 1.4), in care, prin sageti, se indica modul de obtinere a acestor scheme.
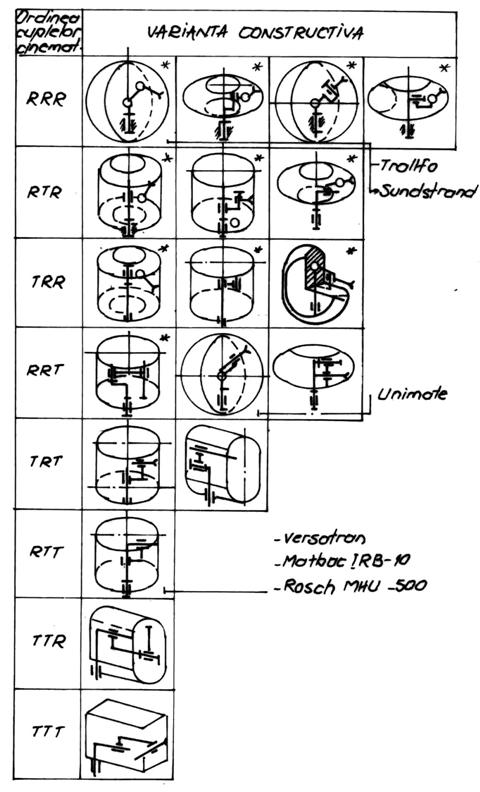
Figura 1.3.
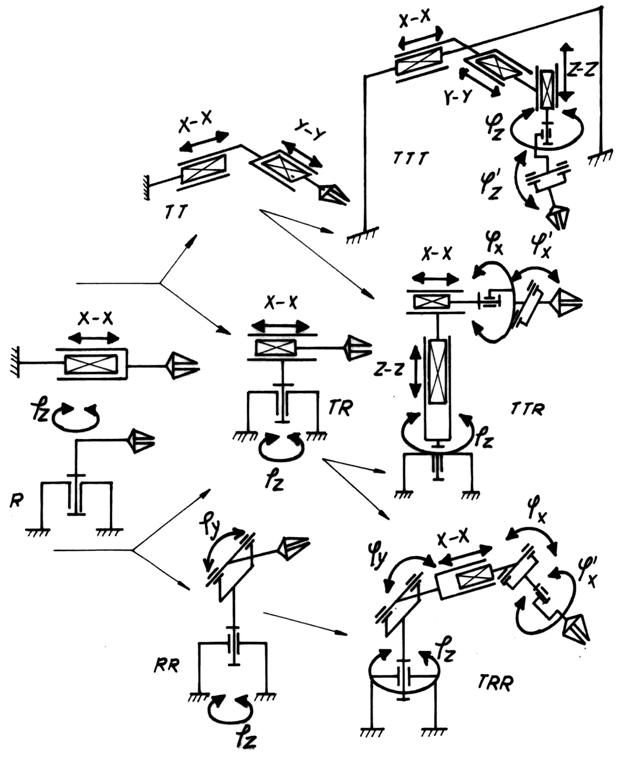
Figura 1.4
In constructia de roboti s-au impus schemele cinematice structurale care asigura zone de lucru cilindrice sau sferice; aceste scheme au un grad ridicat de universalitate a deplasarilor spatiale ale pieselor manipulate, iar variantele constructive sunt complicate.
h) Cinematica articulatiei. Se defineste ca fiind caracterizata de gradele de libertate ale miscarilor care asigura orientarea pieselor transportate; deplasarea peisei din articulatie are un caracter local.
Alegerea cinematicii articulatiei depinde in mare masura de cinematica bratului, adica de caracterul deplasarilor piesei din pozitia finala. Deplasarea piesei prin intermediul unei rotiri, de regula, duce la modificarea orientarii ei unghiulare. Astfel numarul de grade de libertate de rotatie ale bratului reprezinta tot atatea posibilitati de orientare unghiulara la deplasarea spatiala a acesteia. Pentru mentinerea neschimbata a pozitiei unghiulare in timpul deplasarii ei este necesar ca si articulatia sa aiba acelasi numar de grade de libertate de rotatie in raport cu axa de coordonate ca si bratul.
Pentru robotii cu doua deplasari rectilinii si una de rotatie (figura1.2c) mentinerea orientarii unghiulare initiale a piesei pana in pozitia finala este posibila daca articulatia are un singur grad de libertate de rotatie (figura 1.5). Pentru robotii cu o miscare de translatie si soua de rotatie (figura 1.2e), este necesara rotirea articulatiei in jurul a doua axe de coordonate (figura 1.5b).
Articulatia bratului trebuie sa asigure mentinerii orientarii initiale a piesei si sa permita realizarea unor rotiri speciale ale piesei. In majoritatea cazurilor, aceste miscari sunt necesare pentru prereglarea piesei in procesul tehnologic de prelucrare sau de montare. Avand in vedere ca piesele prelucrate pe masini unelte, in majoritatea cazurilor, se fixeaza cu
axa dispusa orizontal sau vertical, articulatia care 2 grade de libertate de rotatie in jurul acestor axe are gradul de universalitate cel mai adecvat.
Articulatia bratului robotului, de regula, contine in
ea si sistemul de actionare a mainii mecanice (figura 1.5), care
realzeaza apucarea si strangerea piesei. Aceasta actionare
nu se ia de regula an considerare la stabilirea numarului de grade de libertate ale manipulatorului
si robotului, deoarece nu realizeaza modificarea
pozitiei spatiale sau orientarii piesei.
Figura 1.5.
Se pot distinge cateva sub ansambluri caracteristice folosite in prezent, ele sunt prezentate in figura 1.6 si reprezinta: a-brat mobil; b-brat dublu articulat; c-brat triplu articulat; d-mecanism de rotire; e-mecanism de ridicare;f-carucior; g-monorai; h-masa; i-mama; mecanica. Variantele constructive se deosebesc prin constructia bratului, numarul mainilor mecanice, marimile curselor de deplasare, prezenta sau absenta unora din subansamblurile mai sus mentionate
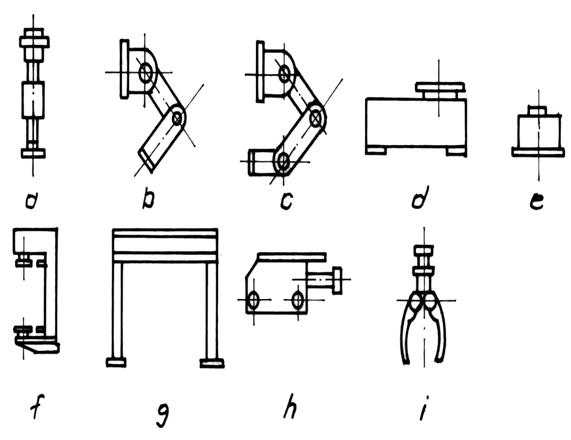
Figura 1.6.
1.1.2. Clasificarea robotilor industriali. Terminologie.
Intrucat problemele legate de robotii industriali sunt destui de bine conturate, au inceput activitati de standadizare in acest domeniu. In Japonia, in anul 1974 a luat fiinta o comisie pentru standardizare in domeniul robotilor industriali. Aceasta comisie a efectuat un studiu care se refera la clasificarea robotilor industriali pe baza structurii si functiilor lor, precum si la terminologia an acest domeniu.
Clasificarea robotilor industriali propusa de comisia japoneza, avand in vedere diversitatea criteriilor de grupare ale acestora, este urmatoarea:
I.1. Manipulator manual - care este actionat direct de om;
I.2. Robot secvential - care are anumiti pasi ce "asculta" de o procedura predeterminata. Aceasta poate fi:
robot secvential fix, la care informatia predeterminata nu poate fi usor schimbata;
robot secvential variabil, la care care informatia predeterminata poate fi usor schimbata.
I.3. Robot repetitor (robot playback), caracterizat prin aceea ca initial omul il invata pe robot procedura de lucru, acesta memoreaza procedura, apoi o poate repeta de cate ori este nevoie;
I.4. Robot cu contol numeric (N.C. robot) - robotul executa operatiile cerute in conformitate cu informatile numerice pe care le primeste despre pozitii si conditii;
I.5. Robot inteligent - este cel care isi decie comportamentul pe baza informatiilor primite prin senzorii pe care ii are la dispozitie si prin posibilitatile sale de recunoastere.
II. Clasificarea dupa forma miscarii:
II.1. Robot cartezian - este robotul al carui brat opereaza intr-un spatiu definit de coordonate carteziene;
II.2. Robot cilindric - similar, dar spatiul este definit in coordonate cilindrice;
II.3. Robot sferic (polar) - similar, dar spatiul este definit in coordonate sferice (sau polare);
II.4. "Prosthetic robot" - este un manipulator care are un brat articulat;
II.5. Roboti in alte tipuri de coordonate - care sunt definiti in mod corespunzator.
III. Clasificare dupa numarul gradelor de libertate ale miscarii robotului.
2-6 grade de libertate plus unele miscari suplimentare, cum ar fi orientarea dispozitivului de prehensiune, prinderea, desprinderea obiectului manipulat, etc.
IV. Clasificarea dupa spatiul de functionare si greutatea sarcinii suportata.
V. Clasificare dupa metoda de control.
Se impun urmatoarele observatii:
manipulatoarele simple dispun in general 2-3 grade ed libertate; miscarile sunt controlate prin dispozitive, functionand dupa principiul "tot sau nimic";
- robotii programabili au numarul gradelor de libertate mai mare decat 3; in general robotul este inedpendent de mediu, fiind lipsit de capacitati senzoriale si lucrand in bucla deschisa;
- robotii inteligenti sunt dotati cu capacitati senzoriale, lucrand in bucla inchisa, avand sisteme de coordonate, intre "simturi" si organele de executie.
VI. Alte criterii de clasificare a robotilor industriali.
Astfel se utilizeaza impartirea acestora in genratii sau nivele, in functie de comanda si de gradul de dezvoltare a inteligentei artificiale.
Robotii industriali din generatia 1 actioneza pe baza unui program flexibil, dar prestabilit de programator si care nu se poate schimba in timpul executiei operatorilor.
Robotii industiali din generatia 2 se caracterizeaza prin faptul ca programul flexibil prestabilit de programator poate fi modificat in masura redusa, in urma unor reactii specifice ale mediului.
Robotii industriali de generatia 3 poseda insusirea de a-si adapta singuri, cu ajutorul unor dispozitive logice, in masura restransa, propriul program la conditiile concrete ale mediului ambiant, in vederea optimizarii operatiilor pe care le executa.
VII. Un alt criteriu de clasificare care priveste caracteristicile de comanda.
Influenteaza in cea mai mare masura gradul de evolutie al robotilor
ca si costurile acestora. S-au stbilit patru tipuri de baza pentru roboti si manipulatoare:
tip A cu servocomanda si conturare;
tip B cu servocomanda, punct cu punct;
tip C fara servocomanda, programabil;
tip D neprogramabil, cu dispozitive de transfer "pick and place".
VIII. Un alt criteriu de clasificare tine seama de modul de constructie grupeaza robotii dupa cum urmeza:
- roboti de constuctie standard, la care nu se poate interveni pentru a modifica substantial structura acestoa; din aceasta grupa fac parte robotii din familia UNIMATE-S.U.A., robotii japonezi ROBITUS RA si ROBITUS RB.
- robotii "articulati" in structura carora intra elementele artificiale intre ele, rezultand lanturi cinematice spatiale deschise (robotii ESAB- ASEA Suedia, 6CH ARM S.U.A., Type 80 vertical Franta) si lanturi cinematice spatiale inchise (robotii: SCHLATTER HDS36 - Germania, TRALLFA - Norvegia).
- roboti de constructie modulara, constituiti in principiu din module de rotatie, module de translatie, module de orientare, dispozitive de prehensiune, elemente de legatura, etc. Interconectind in diferite moduri aceste module rezulta arhitecturi variate de roboti, in functie de aplicatia concreta in care vor intra (de exemplu, robotii japonezi ROBITUS RC, robotii din familia KAUFELDT).
VIII. Alt criteriu de clasificare dupa arhitectura generala.
Avand in vedere numarul mare de roboti industriali existenti in lume,
precum si marea diversitate a acestora, se poate face o clasificare dupa
arhitectura generala a modulelor construite pana in prezent; se disting urmatoarele tipuri de roboti sub aspect structural:
- tipul "brat articulat" (BA) - este construit din elemente articulate formand un lant cinematic deschis, avand cu preponderenta cuple cinematice de rotatie, ale caror elemente sun actionate direct de motoare rotative amplasate in apropierea zonelor de contact.
Robotul ASEA 10 (Suedia) cu actionare electrica. O constructie similara au robotii PUMa cu actionare electrica si 6CH ARM cu actionare hidraulica.
Robotii de tip BA prezinta avantajul unei mari supleti si a accesului relativ usor al dispozitivelor de prehensiune la obiectul manipulat; ca urmare robotii de tip BA se utilizeaza cu succes in aplicatii de sudare, vopsire-metalizare, montaj, avand un spatiu de lucru relativ mare. Dezavantajul principal consta in faptul ca au structura de rigiditate relativ mica.
- tipul "lant inchis" (LI) de roboti au in structura mecanismului generator de traiectorie un contur poligonal inchis, fapt care permite realizarea unor spatii de lucru de geometrie mai complicata si conduce la o mai mare rigiditate a sistemului mecanic. Actionarea se face si in acest caz cu motoare rotative amplasate in apropierea zonelor de contact ale cuplelor cinematice conducatoare. Din aceasta categorie fac parte robotii SCHLATTER, HDS-36 (Germania) cu actionare electrica.
Robotii industriali de tip LI sunt supli, cu posibilitati de acces in spatii greu accesibile. Comparativ cu robotii de tip BA, acestia au in plus o rigiditate mai mare a sistemului mecanic, ca urmare au o utilitate mai
mare,putand fi utilizati si la deservirea unor prese si ciocane de forja, la
manipularea unor sarcini in depozite, pentru paletare, etc.
Dezavantajul principal al robotilor te tip LI il constituie constructia lor complicata.
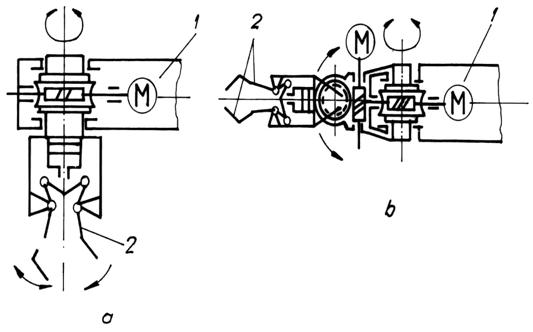
- tipul "pistol" (P) de roboti industriali este constituit dintr-un corp central care poarta un brat asemanator unei tevi de pistol, avand posibilitatea sa-si schimbe directia si lungimea. In general, actionarea in cazul acestor roboti este pneumatica sau hidraulica, variantele actionate electric fiind rar intanlite.
Pentru exemplificare se amintesc robotii din generatia 1 MACHINE DYNAMICS (Australia), familia modularizata de roboti suedezi MHU Senior, MHU Junior si MINOR-ELECTROLUX, robotul Star-o-mat (Germania). Avantajul principal al robotilor de ip P este constructia lor simpla; supletea si dexteritatea lor sunt insa mai reduse intrucat numarul gradelor de libertate este mai mic, cursele de lucru fiind deasemenea mai reduse. Robotii de tip P se utilizeaza la manipularea pieselor in vederea deservirii masinilo-unelte si preselor de stantare-ambutisare.
- tipul "turela" (T) de roboti idustriali are o arhitectura asemanatoare cu cea a robotilor de tip P, deosebirea constand in faptul ca la tipul T intre corpul central si brat se interpune un subansamblu de forma unei turele care permite o rotatie suplimentara in jurul unei axe care se gaseste intr-un plan orizontal;
Intrucat majoritatea robotilor industriali de tip T sunt actionati hidraulic, acestia se caracterizeaza printr-o robustete, constructie compacta si dexteritate mai mare decat cea a robotilor de tip P, fapt pentru care au o aplicabilitate universala.
- tipul "coloana" (C) de roboti industriali se caracterizeaza prin faptul
ca este purtat de o coloana verticala care permite o deplasare de translatie
dupa aceeasi directie.
Robotul SIROBOT cu actionare electrica, are coloana construita din doua tije verticale cilindrice, miscarea de translatie fiind asigurata prin intermediul unui mecanism surub-piulita. O constructie similara o are robotul SCIAKY.
Robotii de tip C au o constructie simpla si robusta, au dispozitivul de ghidare rigid si o dexteritate suficient de mare. Dezavantajul principal este supletea mai redusa. Robotii de tip C se utilizeaza in special in operatii de sudare.
- tipul "cadru" (CD) de roboti industriali se construiesc cu un cadru care contine coloana, ceea ce ii confera o rigiditate sporita coloanei verticale.
Robotii de acest tip sunt: robotul FANUC (Japonia) si robotul JOB'OT (Italia), care contin si un dispozitiv pneumatic de echilibrare a greutatii bratului a carui forta se transmite prin intermediul unui brat articulat.
- tipul "portal" (PO) de roboti industriali permite manipularea unor piese grele intr-un spatiu de lucru de dimensiuni mari.
Ca exemplu se pot da robotii utilizati in constructia de masini cum ar fi: ROBOT TYPE 80 PORTIQUE si DOUBLE PORTIQUE (Franta).
- robotii de tip "carucior" (CA), acopera un spatiu mare de lucru, prin montarea unui robot pe sasiuri sau carucioare care se pot deplasa liber sau ghidare pe sine.
Rovotul MP9 (Rusia) si robotul electrohidraulic romanesc VIPAS 2 sunt exemple elocvente in acest sens.
Analizand clasificarea robotilor industriali dupa caracterul lor arhitectural se constata ca arhitectura robotilor este strans corelata cu forma geometrica a spatiului de lucru.Astfel robotii de tip C, CD, PD au spatiul de lucru paralelipipedic, cei de tip C, P, CD au spatiul de lucru cilindric, cei de tip BA si T au spatiul de lucru sferic, iar cei de tip CA si LI au spatiul de lucru compus.
Facand o comparatie a robotilor industriali prin prisma parametrilor globali k1, k2, k3, se remarca faptul ca tipurile arhitecturale BA, T, PO dau in general cele mai mari valori ale parametrului k1, tipul P da valori maxime parametrului k2, iar tipul T da valori maxime parametrului k3.
In ceea ce prive;te terminologia, studiul comisiei japoneze de standardizare propune sa fie stabilita pe baza unui arbore de functii si structuri, prezentat in figura7, prezentand deasemenea o serie de termeni dupa cum urmeaza:
miscarea sus-jos a bratului (up-down of the arm): miscarea paralela in sus si in jos a bratului in planul vertical al robotului;
rotirea sus-jos a bratului (up-down of tuning of the arm): rotirea bratului in planul vertical al robotului;
deplasarea in jurul axei longitudinale a bratului (in-out of the arm);
revolutia bratului in jurul axei lui longitudinale;
rotirea bratului (right-left turning of the arm, rotating of the arm): rotirea bratului in jurul axei verticale;
miscarea dreapta-stanga a bratului in planul orizontal al actiunii robotului;
ínclinarea mainii (bending of the hand, swing of the hand):
miscarea mainii in jurul incheieturii;
revolutia mainii: miscarea de rotatie a mainii relativa fata e brat;
precizia repetarii (play-back accuracy): diferenta intre pozitiile invatate si cele repetate.
Copyright © 2025 - Toate drepturile rezervate