|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
Lanturi cinematice de avans
1 . Definirea lantului cinematic de avans
Lantul cinematic de avnas asigura pozitionarea repetata ciclic pe una
din traiectoriile generatoare G a elementului generator ![]()
Fig.30. Schema de principiu a aschierii
Traectoria miscarii de avans poate fi :
-circulara (mai rar) - freze cu avans continu circular
-rectilinie
Miscarile de avans rectilinii pot fi dispuse orthogonal pe trei directi in spatiu.
-Pentru programarea Masinilor -Unelte cu Comanda Numerica in STAS8902/71 si ISO-R841 s-au precizat axele de coordonate pe care au loc miscarile de avans.
Axa ,,Z" este axa arborelui principal cu sens pozitiv in sensul maririi distantei intre scula si piesa.
Axele,,x" si ,,y" sunt cuprinse in planul perpendicular pe axa ,,Z"
2 . Structura lantului cinematic de avans
Marimea avansului - unitati de masura :
mm/rot - pentru strunjire, gaurire
mm/cd - pentru rabotare, mortezare
mm/cs - pentru rectificare
mm/min, m/min - frezare, rectificare
Avansurile pot fi :
-continue - strung, masini de frezat, masini de gaurit
-periodice - seping, raboteza, morteza
Marimile avansului se poate realiza folosind urmatoarele tipuri de mecanisme :
-mecanice (surub piulita, pinion cremaliera, cama-tachet)
-hidraulice -
VE-veriga executanta
Fig. 31 Scheme structurale a unor lanturi cinematice
de avans de tip mecanic si hidraulic
3. Mecanisme mecanice pentru transformarea miscarii circulare in miscare de avans rectilinie
Cele mai importante sunt:
surub- piulita
cama si tachet
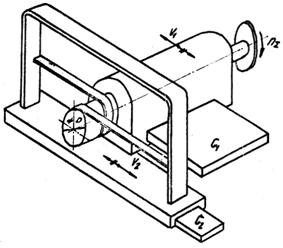
3.1 Mecanismul surub - piulita
Se construieste in doua variante:
a. surub lung- piulita scurta
b. surub scurt semipiulita lunga
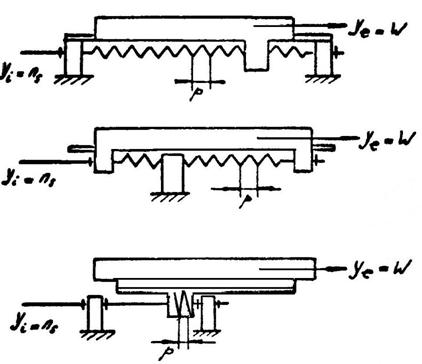
Fig.32. Tipuri de mecanism surub-piulita (surub lung- piulita scurta
si surub scurt- semipiulita scurta)
![]()
![]()
![]()
![]()
![]()
![]()
Avantajele mecanismului surub-piulita:
raport mare de reducere cinematic si dinamic
miscari precise si linistite
au posibilitate de autofranare
Din punct de vedere al frecarii se utilizeaza doua variante constructive:
surub-piulita cu frecare de alunecare
surub-piulita cu frecare de rostogolire (suruburi cu bile)
Constructiile surub-piulita cu alunecare :
sunt cele mai numeroase datorita costului redus;
sunt cu autofranare si redus ![]()
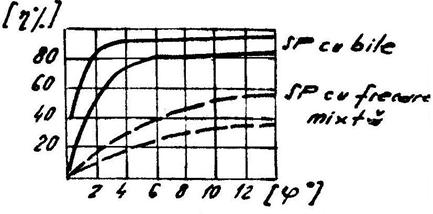
Fig.33. Randamentul mecanismului Surub-Piulita
exista alunecari impuse cu joc minim ce se instaleaza prin reglaj si este legat si de uzura;
problema specifica: eliminarea jocului (sau reducerea ) se poate realiaza utilizand piulita din doua bucati;
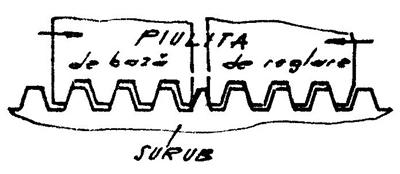
Fig.34. Schema de principiu pentru eliminarea jocului pe flancuri la mecanismul SURUB-PIULITA
exista solutii de scoatere a jocului numai la cursa activa- la retragere se lasa
joc de 0,05~0,08 pentru micsorarea uzurii
Fig.35 Diferite solutii pentru eliminarea jocului pe flancuri la mecanismul SURUB- PIULITA: a,b-sisteme de reglaj a jocului mecanice; c- sistem de reglaj automat la surub scurt
Sistem de reglaj automat la surub scurt (fig35.c)
Actionare hidraulica : - la cursa activa se preia jocul
- la cursa de retragere se lasa jocul initial
Pentru cresterea randamentului se foloseste sistemul cu alunecare si frecare lichida realizandu-se o sustentatie hidraulica. Se utilizeaza la masini unelte mari.
Constructia cu frecare de rostogolire (suruburi cu bile)
- Avantaje:
- precizii mari;
- viteze mici fara "sacadare";
- randament >40% .
- Dezavantaje :
- tratemente termice + prelucrari analoage rulmentilor;
- mai scumpe de cca. 10 ori;
- necesita o anumita pretensionare a bilelor;
- necesita circuit de intoarcere a bilelor.
- Tipuri constructive:
- cu bile pentru puteri mici si mijlocii:
- cu role planetare pentru Masini-Unelte grele.
Domeniu de aplicare: mai ales la Masini-Unelte grele.
Fig. 36 Schema de principiu a mecanismului SURUB-PIULITA cu bile , cu prestrangere axiala reglabila sistem ROTAX (Anglia)
La viteze cele doua piulite in sens contrar cu cate un dinte.
Diferenta de unghi fiind:
![]()
De exemplu: p =10 mm
1rotatie surub......piulita avans p'
![]() z =100
dinti ∆ surub ........ piulita avans ∆x
z =100
dinti ∆ surub ........ piulita avans ∆x
z-1= 99 ![]()
![]() mm- reglaj foarte fin
mm- reglaj foarte fin
Constructii de surub- piulita cu role planetare in figura 37:
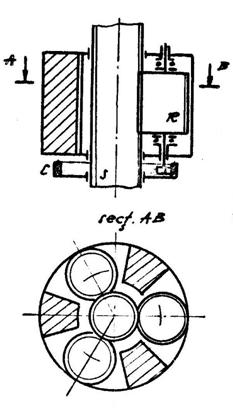
Fig.37 Mecanism cu surub si role planetare cu coroana pentru eliminarea jocului pe flancuri
Mecanisme cu cama si tachet
Sunt forte diferite dar cel mai folosite in constructia de M.U.se clasifica dupa forma camei :
-plana
-cilindrica
a . Cama plana cu profil rectiliniu (fig.38)
Fig. 38 Cama plana cu profil rectiliniu
![]()
b . Cama plana de profil spirala arhimedica (fig.39)
Asigura vitez de avans w constant la ![]()
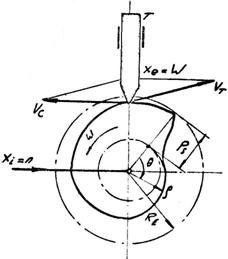
Fig. 39 Mecanism cu tachet si cama plana de profil spirala Arhimedica
![]()
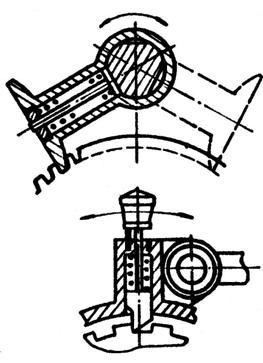
c . Cama cilindrica cu profil elicoidal cu pas ![]() mescare similara ca a mecanismului surub-piulita
mescare similara ca a mecanismului surub-piulita
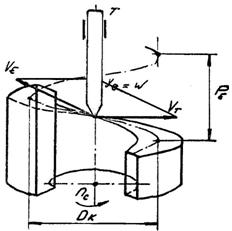
Fig. 40. Cama cilindrica cu profil elicoidal
Mecanisme pentru reglarea avansului continuu
Functie de natura lantului cinematic de avans mecanismele de reglare a vitezei de avans continu pot fi :
Variatori continui mecanici;
Trasmisii prin conuri in trepte (pe cale de disparitie azi);
Cutii de avansuri:
a. Cutii similare cutiilor de viteza compuse din :
-mecanisme baladoare;
-ambreaje mecanice sau electromagnetice;
-roti de schimb;
-au gabarite mai mici deoarece transmit puteri mai mici.
b. Cutii cu brat mobil (NORTON)
Se realizeaza la lanturi de filetare si au fost folosite la strung
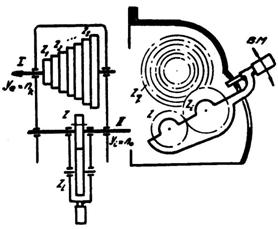
![]()
![]()
Fig. 41. Mecanism pentru reglarea avansului continuu (Cutie de avans cu brat mobil tip NORTON)
c. Cutie cu pana glisanta
-permite realizarea a 3-5 rapoarte (max 10)
-CR=6 (max 8)
-se utilizeaza pentru cutii de avansuri usoare
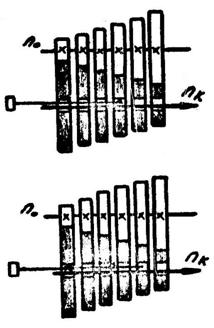
Fig. 42. Principiul mecanismului
cu pana glisanta
Mecanisme pentru reglarea avansului periodic (intermitent)
Avansul periodic este necesar la :
-sepinguri ;
-raboteze;
-morteze;
-masini de rectificat;
-unele masini de danturat.
Avansul intermitent se poate obtine dintr-o miscare circulara sau prin intermediul unui mecanism care lucreaza numai o parte din timpul total
Mecanisme folosite :
-mecanismul cu chlichet;
-mecanismul cu cruce de Malta (mai rar folosit)
Mecanismul cu clichet la care oscilatia clichetului este data :
a)de miscare de rotatie
b)de miscare de translatie
Fig.43. Mecanism pentru reglarea avansului periodic , cu clichet folosit la miscari de rotatie si translatie
Din punct de vedere al danturi rotii putem avea:
-danturi asimetrice pentru miscari ireversibile (fig. 44);
-danturi simetrice pentru miscari reversibile(fig. 45).
Forme de clicheti pentru miscari reversibile se pot vedea in fig. 46.
 Pentru reglarea
marimii unghiului de oscilatie ,,
Pentru reglarea
marimii unghiului de oscilatie ,,![]() " se utilizeaza diverse sisteme :
" se utilizeaza diverse sisteme :
Fig.46. Tipuri de clicheti pentru miscari reversibile pentru danturi simetrice
Clichet
de la seping
a)Modificarea (reglarea) cursei mecanismului de translatie care
transmite miscare la clichet (fig.47.a,b )Creste R=> creste ![]()
b)Rabatarea clichetului facandu-l sa scape peste dinti (fig.47.c)
Creste R=>creste ![]()
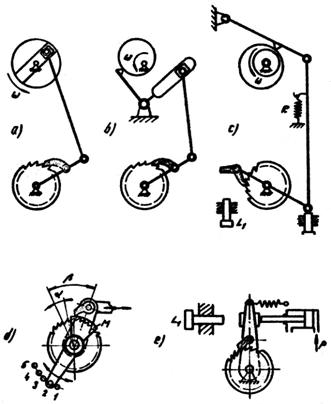
Fig.47. Variante constructive
de mecanisme cu clichet ca posibilitati de reglare unghiului de rotire,, ![]() "
"
c)Scut peste care sare clichetul(fig.47.d )
Din <![]() roata se va
roata se va
roti
cu ![]()
Mecanismul cu cruce de Malta nu permite reglarea unghiului de oscilatie.
Este folosit la mesele rotative pentru masini-unelte agregat. In fig 48. se poate observa un mecanism cu cruce de Malta exterior, iar in fig 49. un mecanism cu cruce de Malta interior.
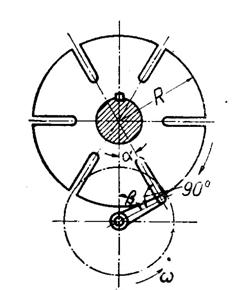
Fig.48. Mecanism cu cruce de Malta cu angrenare exterioara
Fig.49. Mecanism cu cruce de
Mecanismul cu cruce
de
Mecanisme de insumare a miscarilor
-Sunt folosite des in lanturile cinematice(ale masinilor de formare a suprafetelor, la microdeplasari de instalare la reglaj fine
-Efectueaza sume algebrice sub sarcina a vitezelor de deplasare a unor mecanisme asociate mixt
Se deosebesc doua tipuri de baza :
-deschise
-inchiese
Variante de mecanisme de insumare deschise :
a. 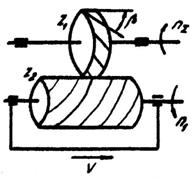 Cu roti dintate cilindrice cu dinti inchlinati
Cu roti dintate cilindrice cu dinti inchlinati

-prima turatie : 
-a doua turatie rezulta din functia de transfer a mecanismului considerind
roata ![]() ,ca o cremaliera cu miscare reversibila:
,ca o cremaliera cu miscare reversibila:
V = 
deci turatia
suplimentului pe care o capata ![]() datorita deplasarii V
datorita deplasarii V
![]()
Deci ![]()
b.Cu melc roata melcata
 -prima turatie
-prima turatie
![]()
a doua turatie conform fuctiei de transfer :
V=![]()
![]()
![]()
Fig.51. Mecanism pentru insumarea miscarii, cu melc si roata melcata
c.
 Cu pinion cremaliera
Cu pinion cremaliera
![]()
![]()
![]()
Fig.52 Mecanism pentru insumarea miscarii , cu cremaliera si roata dintata
d.
 Cu diferential Este folosit la masinile de danturat
Cu diferential Este folosit la masinile de danturat
Daca carcasa e blocata
![]()
Daca blocam pe ,,1"
![]()
Deci
![]()
Fig. 53. Mecanism cu diferential
Exemple de utilizare a mecanismului de insumare
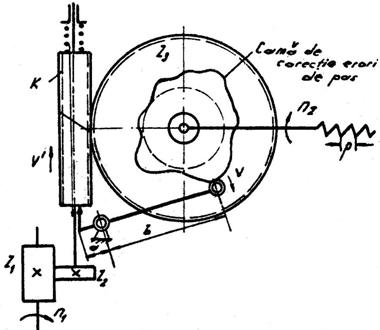
Pentru corectii ale lipsei de precizie a pasului,,p"
![]()
![]()
Fig.54. Mecanism cu cama pentru corectia erorilor de pas , la suruburi conducatoare de precizie
 e.Cu tambur si banda -Este
folosit la masini de rctificat dantura MAAG
e.Cu tambur si banda -Este
folosit la masini de rctificat dantura MAAG
![]()
![]()
![]()
![]()
![]()
Fig.54. Mecanismde insumare cu tambur si banda
Lanturi cinematice pentru masini auxiliare
Servesc pentru realizarea de masini ce nu sunt incluse direct in schma procesului de aschiere avind un rol secundar
Dupa rolul lor functional in rindul masinilor se clasifica in :
-lanturi cinematice auxiliare pentru pozitionare
- lanturi cinematice auxiliare pentru divizare
- lanturi cinematice auxiliare pentru alimentare - (scule, semifabricate)
- lanturi cinematice auxiliare pentru deplasari rapide
- lanturi cinematice auxiliare pentru comutare (comanda)
Lanturi cinematice auxiliare pentru pozitionare
Realizeaza pozitia necesra dintre cula si semifabricat
Caracteristici:
-viteze numai pentru deplasare
-precizie de pozitionare a angrenjului de lucru
Dupa modul de legare cu celelate lanturi ale M.U. pot fi :
a - lanturi de pozitionare independente
b - lantrui de pozitionare cu elemente de comutare sau cuplaje (legate de sistemul de avans)
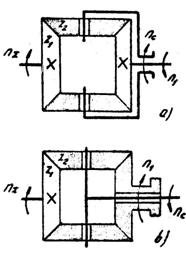
c - lanturi de pozitionare cu mecanism diferential
 a.Lanturi de pozitionare in independente:
a.Lanturi de pozitionare in independente:
b.Lant de pozitonare cu elemente de comutare - deplasare rapida
c.Lant de pozitionare cu mecanism diferential
De obicei in lanturile cinematice auxiliare cat si cele de avans sant necesare anumite mecanisme pentru inversarea miscarii
Lanturi cinematice de oprire la cota
-cu comanda manuala
-cu comanda programata pe came
-cu comanda dupa program cu oprire la cota autoadaptari
i-indexor
L pozitionat cu cama adaptive
Programare cote pe limitari calei mecanici
Lant cinematic cu x pentru divizare
Pot fi in functie de forma traectoriei :
-divizare rectilinie
-divizare circulara
Functi de mpdul de actionare si comanda :
-cu actionare manuala
-cu actionare mecanica si comanda manuala
-cu actionare mecanica si comanda automata
Divizorul cu actionare manuala sau mecanica la masini de gaurit in coordinate-(lab aschiere)
Pot exista lanturi
cinematice de derivate conectate intr-o structura cinematica complexa :
-divizare prin comutarea lantului
(fig.a.)
-divizare prin insumarea a 2 masini (fig.b.)
Copyright © 2025 - Toate drepturile rezervate