|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
Universitatea POLITEHNICA Bucuresti
Facultatea de Automatica si Calculatoare
Variatoare de tensiune continua pentru
comanda motoarelor electrice de curent continuu
Principii constructive si functionale. Clasificare
Principii functionale
Variatorul de tensiune continua (VTC), denumit si chopper, este un convertor care transforma tensiunea continua de la intrare in impulsuri dreptunghiulare la iesire.
Valoarea medie a tensiunii de la iesirea unui chopper se poate modifica intre 0 si cea a tensiunii de alimentare (care este constanta), folosind unul dintre urmatoarele principii :
modificarea frecventei de repetitie a unor impulsuri de durata constanta;
modularea in durata a unor impulsuri de frecventa constanta.
Astfel se realizeaza reglarea prin tensiune a turatiei motoarelor de curent continuu, o utilizare frecventa a VTC.
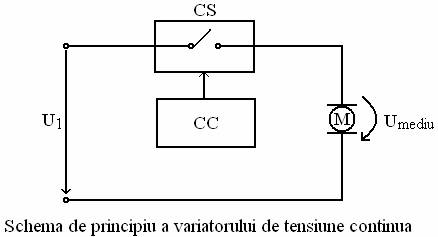
CS este un contactor static (chopper);
CC este circuitul de comanda al CS;
M reprezinta indusul motorului de curent continuu.
Dupa o secventa repetata periodic de inchideri si deschidere ale contactorului, motorul este alimentat cu tensiunea medie :
![]() (1)
(1)
unde Tc reprezinta durata de conectare a contactorului CS, iar T este perioada de repetare a comenzii.
Utilizarea unui semnal de forma dreptunghiulara ca tensiunede alimentare pentru motorul de c.c., avand amplitudinea U si perioada T constante, dar durata Tc variabila, permite reglarea valorii medii a tensiunii prin reglarea intervalului de timp Tc.
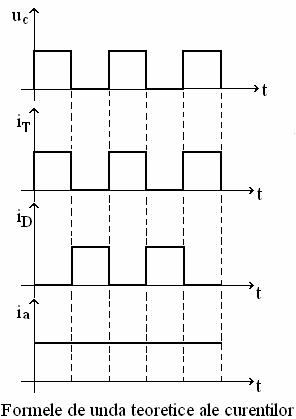
In figurile de mai jos sunt prezentate formele de unda ale tensiunii si curentului reglat de chopper :
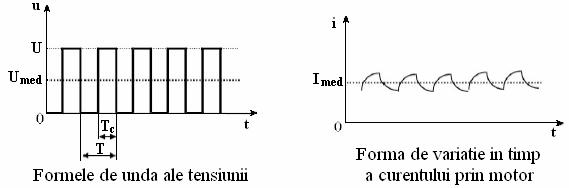
Pentru a asigura conditia de continuitate a curentului prin motor, este necesar ca perioada T sa fie mult mai mica decat constanta de timp electromagnetica a motorului.
Chopperul cu stingere fortata
O varianta concreta a contactorului static din variator este chopperul cu stingere fortata.
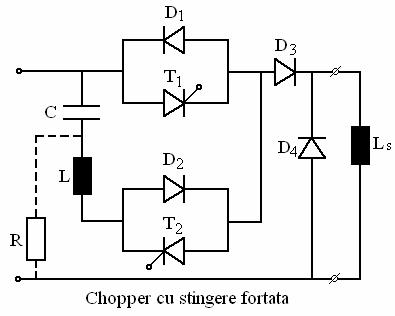
Principalele elemente din schema de mai sus sunt : tiristorul principal T1, tiristorul de stingere T2, condensatorul de stringere C, inductivitatea de stingere L, dioda de nul D4.
Pentru a se urmari functionarea chopperului cu usurinta, se imparte durata de repetare a comenzilor T in sase intervale de timp, corespunzatoare schimbarilor de stare: conductie/blocare.
La momentul t0 se comanda T1, sarcina este alimentata cu tensiunea U1si se presupune Ls suficient de mare si curentul prin sarcina constant: is=Is.
La momentul t1 se comanda tiristorul de stingere T2. In momentul conectarii sursei de alimentare, condensatorul C se incarca. Prin anularea curentului rezonant de descarcare a condensatorului, la momentul t2, tiristorul T2 se blocheaza. In momentul t3, datorita schimbarii sensului curentului iC, suma curentilor iC si iS devine mai mica decat curentul de mentinere in conductie al tiristorului T1 (deci T1 se stinge).
Incarcarea condensatorului C se continua si pe intervalele t3-t4, t4-t5, t5-t6. Tensiunea la care se incarca condensatorul este mai mare decat valoarea tensiunii de alimentare U1, datorita energiei inmagazinate in inductivitatile L si LS. Din acest motiv se deschide dioda de nul D4, la momentul t5. In momentul t6, curentul prin condensator, iC devine nul, iar curentul prin sarcina iS trece numai prin dioda D4, pana la urmatoarea comanda a lui T1.
Circuitul folosit pentru comanda chopperului trebuie sa furnizeze impulsurile de amorsare pentru tiristorul principal T1, cu o frecventa de repetitie T. Intrarea in conductie a lui T1 este echivalenta cu inchiderea contactului contactorului static CS. Dupa un interval Tc de la comanda lui T1, circuitul de comanda genereaza impulsul de amorsare a tiristorului T2, iar motorul este deconectat de la tensiunea de alimentare.
Mentinand constanta perioada T de repetitie a impulsurilor de comanda la T1 si modificand momentul de aparitie al impulsului destinat tiristorului de stingere T2, se realizeaza modificarea tensiunii de iesire, si astfel se modifica turatia motorului.
Chopperul cu stingere fortata functioneaza intr-un singur cadran, ceea ce constituie un dezavantaj daca se doreste inversarea curentului sau tensiunii pe motor. Pentru a se realiza o actionare reversibila se poate utiliza un tip de chopper cu doua sau patru cadrane.
Clasificare
Daca se doreste marirea sau micsorarea tensiunii intr-o proportie mica, se utilizeaza variatoare fara izolatie galvanica. Acestea pot fi:
variator coborator (reduce valoarea tensiunii);
variator ridicator (creste valoarea tensiunii);
variator mixt (coborator - ridicator);
variator Cuk.
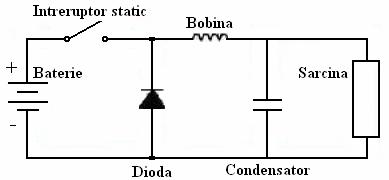
VTC ridicator
Schema de principiu a unui VTC ridicator:
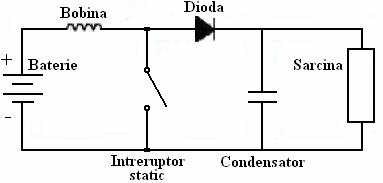
In intervalele de timp in care intreruptorule ste inchis, in bobina se inmagazineaza energie de la baterie. La deschiderea intreruptorului, tensiunea de autoinductie a bobinei, impreuna cu sursa, determina aparitia unei supratensiuni, ce este transferata condensatorului si sarcinii. Dioda, numita dioda de separare, impiedica descarcarea condensatorului pe intervalele de timp in care intreruptorul este inchis. Condensatorul filtreaza tensiunea continua la iesire, reducandu-i pulsatiile.
Randamentul unor astfel de convertoare c.c.-c.c. este de 70%, insa cele mai performante pot atinge 85-90%.
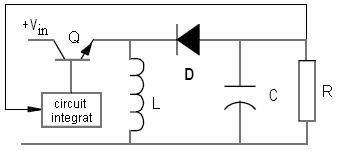
VTC coborator
Schema de principiu a unui VTC coborator:
Pe intervalele de timp in care intreruptorul este inchis, bateria debiteaza curent sarcinii, ce parcurge bobina. Cand intreruptorul este dechis, energia inmagazinata in bobina, asigura mentinerea nenula a curentului, ce se va inchide pe aceste intervalle, prin dioda (numita dioda de nul).
Randamentul acestor convertoare este de 80-90%.
Tensiunea la iesire este mai mica decat a bateriei, fiind utilizate pentru alimentarea sarcinilor cu tensiune mai mica decat a bateriei (aparate radio).
VTC coborator-ridicator
Tensiunea medie de iesire rezulta de polarizare inversa comparativ cu tensiunea de intrare, mai mica sau mai mare in modul, in functie de valoarea raportului de conductie al convertorului.
Pentru analiza acestui convertor in cazul ideal se
fac urmatoarele ipoteze: regimul de functionare este regimul de conductie
continua a curentului iL prin bobina, forma de unda a curentului iL
este liniara, contactoarele statice de c.c. sunt comutatoare ideale,
condensatorul de filtrare al tensiunii de iesire (Vout) este ![]() astfel incat Vout
sa poata fi considerata constanta.
astfel incat Vout
sa poata fi considerata constanta.
Se scriu ecuatiile Kirchhoff pe fiecare interval de timp, ton si toff, corespunzatoare celor doua stari ale contactorului static, de saturatie si de blocare (perioada de comutatie a tranzistorului Q este T= ton+toff).
![]() : Q saturat si D blocata (fiind polarizata
invers) :
: Q saturat si D blocata (fiind polarizata
invers) :
![]()
![]() : Q blocat si D conduce (fiind polarizata direct ca
urmare a tensiunii de autoinductie aparuta pe bobina L la scaderea curentului
prin aceasta) :
: Q blocat si D conduce (fiind polarizata direct ca
urmare a tensiunii de autoinductie aparuta pe bobina L la scaderea curentului
prin aceasta) :
![]()
Se elimina termenul comun ![]() din aceste relatii si rezulta :
din aceste relatii si rezulta :
![]()
Se obtine in continuare raportul de transformare al acestui tip de variator :
![]()
In functie de valoarea raportului de conductie D exista trei cazuri :
![]() atunci
atunci ![]() ;
;
![]() atunci
atunci ![]() ;
;
![]() atunci
atunci ![]() .
.
Metode de comanda. Calculul regimului dinamic
Metode de comanda
Reglarea vitezei actionarii cu motor de curent continuu serie/derivatie prin metoda impulsurilor
Reglarea vitezei prin metoda impulsurilor este utilizata in cazul sistemelor de actionare alimentate de la o sursa de tensiune constanta, pentru care se impune o modificare frecventa a turatiei, intr-o gama de reglare mare, cu coeficient de finete si randament al reglarii cat mai apropiat de unitate.
Principiul metodei consta in alimentarea motorului prin intermediul unui variator de tensiune continua (VTC) care transforma tensiunea continua in impulsuri dreptunghiulare.Valoarea medie a tensiunii de alimentare a motorului poate fi reglata prin comanda VTC.
In figura urmatoare este prezentat principiul reglarii vitezei prin metoda impulsurilor: a) schema electrica;
b)tensiunea de alimentare.
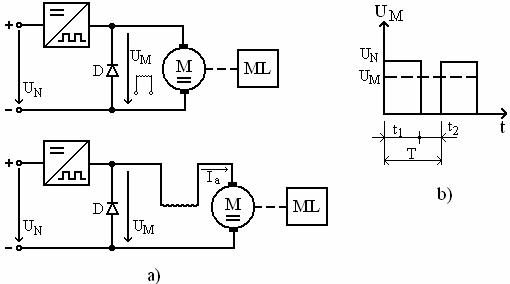
Parametrii care caracterizeaza tensiunea de la iesirea convertorului sunt :
amplitudinea maxima, care in general este egala cu valoarea tensiunii sursei de alimentare ;
amplitudinea minima, care este de regula egala cu zero ;
durata relativa sau factorul de semnal :
![]()
unde t1 este intervalul de timp in care semnalul are amplitudinea maxima si t2 este intervalul de timp in care semnalul are amplitudinea minima ;
frecventa :
![]()
unde tc=t1+t2 ;
valoarea medie a tensiunii :
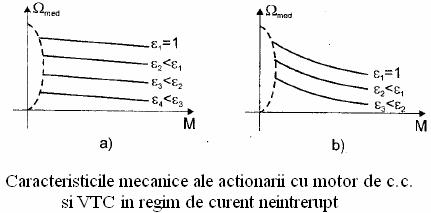
Caracteristicile mecanice definite ca dependenta dintre viteza medie si cuplul la arborele motorului sunt descrise de relatia :
![]()
Impulsurile de tensiune la bornele motorului se realizeza cu ajutorul unui VTC a carui schema de forta este prezentata in figura urmatoare :
Partea de forta a VTC se poate realiza fie cu tiristoare, fie cu alte dispozitive semiconductoare : GTO(Gate Turn-Off Thyristor), MOS(Metal Oxide Semiconductor), IGBT(Insulated Gate Bipolar Transistor).
Partea de comanda se poate realiza cu circuite electronice discrete care functioneaza ca un generator de impulsuri sau se poate realiza numeric, respectiv software.
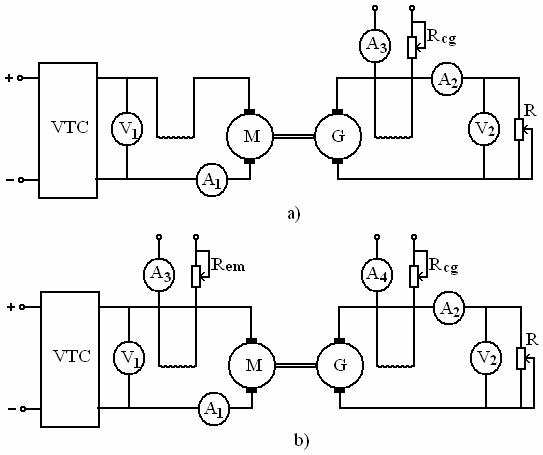
Schema de montaj pentru studiul reglarii actionarii cu m.c.c. serie (a),
respectiv cu excitatie separata (b) si VTC
Chopper cu stingere fortata comandat cu microprocesor
Este necesara o analiza a implementarii pe microsisteme a circuitelor de comanda pentru choppere in vederea realizarii unor circuite flexibile, care sa poata fi incluse in sisteme de conducere numerice, mai complexe, fara interfatari suplimentare. Utilizand microprocesorul ca circuit de comanda este posibila si realizarea unor functii suplimentare sau comanda simultana a mai multor motoare. In comanda chopperului, microprocesorul trebuie sa realizeze urmatoarele functii:
generarea intervalelor de timp T si Tc variabile ;
comanda propriu-zisa a tiristoarelor cu impulsuri scurte sau a tranzistoarelor cu impulsuri de durata Tc.
In continuare se va folosi structura circuitului de putere prezentat in figura de la paragraful in care s-a analizat principiul de functionare al chopperului cu stingere fortata (pagina 4).
Impulsurile de comanda pentru tiristoare se obtin pe doua linii ale unuia dintre porturile de iesire ale microsistemului. Izolarea galvanica intre sistem si circuitul de putere se realizeaza prin amplificatoare cu transformatoare de impulsuri.
Marimile de intrare pentru circuitul de comanda sunt: perioada de repetitie T si durata de conductie Tc pentru tiristorul principal. Valorile acestor marimi pot fi introduse in memoria sistemului de catre utilizator prin consola sau pot fi aduse din exterior peu nul din porturile de intrare ale sistemului. Secventa de impulsuri necesara se poate obtine prin mijloace software sau folosind generatorul de timp real si sistemul de intreruperi.
In organigrama urmatoare este prezentat un program care realizeaza comanda unui chopper.
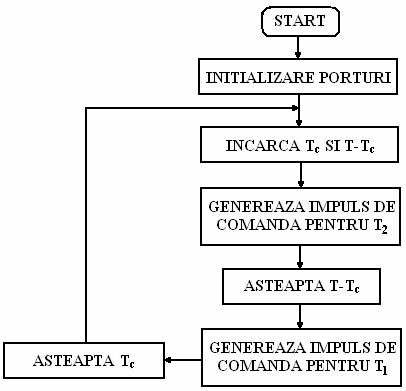
Se va prezenta un program ce realizeaza trei trepte de turatie diferite pentru motor (programul poate fi extins la realizarea mai multor trepte de turatie).
Se alege o perioada T=10ms deoarece constanta de timp electromecanica a motoarelor comandate este Tm>150ms si in cazul in care se foloseste, in comanda, o perioada de 15 ori mai mica nu se ajunge la functionarea motorului in regim de curent intrerupt. Intervalele variabile de timp de conductie Tc pentru tiristorul principal s-au realizat cu valori cuprinse intre 0 si 9.496ms.
Pentru a se asigura o stingere rapida a
tiristorului principal, valoarea maxima pentru Tc trebuie sa se
incadreze in intervalul de timp minim dintre comanda tiristorului de stingere
si comanda tiristorului principal. Elementele de stingere (L si C din circuit)
determina durata minima necesara pentru stingerea tiristorului principal.
Acestea au valorile:![]() si
si ![]() .
.
Intervalul minim de la comanda tiristorului de stingere dupa care poate fi comandat tiristorul principal este :
![]()
Pentru siguranta se aproximeaza ![]() .
.
Se obtine un factor de umplere ![]() de maximum 95%.
de maximum 95%.
Se obtine o valoare a incrementului pentru durata
T de ![]() in cazul in care s-au
utilizat mijloace software, si
in cazul in care s-au
utilizat mijloace software, si ![]() cand s-a folosit microprocesorul
8085 cu frecventa 3.14 MHz.
cand s-a folosit microprocesorul
8085 cu frecventa 3.14 MHz.
Se realizeaza un experiment : se utilizeaza chopperul cu stingere fortata pentru comanda a doua motoare de curent continuu :
un motor de mica
putere, tip EP 211, cu excitatie cu magnet permanent pentru care : ![]() si
si ![]() respectiv
respectiv ![]() , motorul fiind prevazut cu priza pe infasurarea rotorica;
sursa de tensiune utilizata la alimentarea variatorului pentru acest motor este
de tip I 4104;
, motorul fiind prevazut cu priza pe infasurarea rotorica;
sursa de tensiune utilizata la alimentarea variatorului pentru acest motor este
de tip I 4104;
un motor cu
excitatie separata de tip CE 24 E cu parametrii: ![]() ,
, ![]() si
si ![]() ; tensiunea continua a fost obtinuta de la retea cu un
redresor in punte necomandata.
; tensiunea continua a fost obtinuta de la retea cu un
redresor in punte necomandata.
Se constata ca ambele motoare au demonstrat ca nu exista nici un fel de limitari cu privire la turatia ce se obtine.
Simularea sistemului de actionare cu motor de c.c. si VTC in circuit inchis
Se are in vedere modificarea automata a comenzii VTC, astfel incat viteza reala a sistemului de actionare sa urmareasca in permanenta viteza prescrisa, indiferent de perturbatiile aparute din exterior.
Structura tipica a unui sistem de reglare automata a vitezei contine doua regulatoare in cascada : unul de viteza Rw si unul de curent Ri.
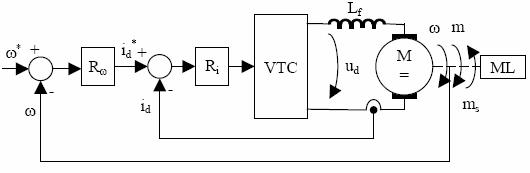
Pentru a indeplini functia de limitare a curentului prin indus, id, regulatorul de curent trebuie sa fie parametrat astfel incat constanta sa de integrare sa fie mult mai mica decat cea a regulatorului de viteza (sa fie mai rapid).
Iesirea unui regulator de tip proportional-integrator (cum este regulatorul de viteza folosit aici)este descrisa de relatia :
![]() , unde kp este constanta de
proportionalitate
, unde kp este constanta de
proportionalitate
ki este constanta de integrare
i*,i sunt marimile prescrisa si masurata a marimii controlate(de intrare)
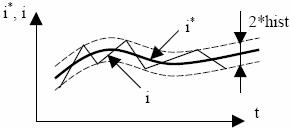
Regulatorul de curent este de tip bipozitional ; este de fapt un comparator cu histerezis, comutatiile fiind determinate de conditiile :
c=1 → 0 i=i*+hist
c=0 → 1 i=i*-hist
ceea ce va determina pastrarea curentului id in jurul valorii prescrise id*, cu o eroare data de banda de histerezis.
In figura urmatoare este prezentata evolutia marimii controlate de un regulator bipozitional:
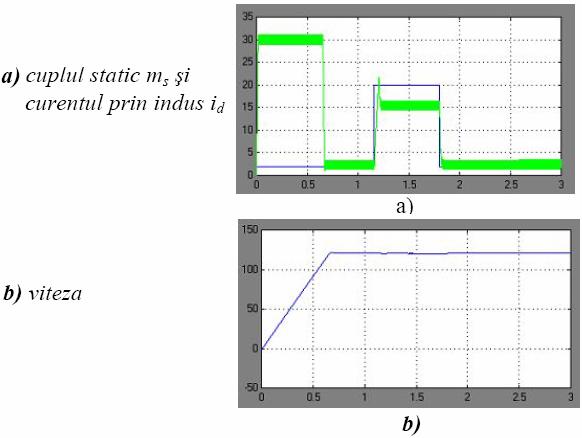
Modelul Simulink al sistemului de reglare automata a vitezei, cu motor de c.c. si VTC :
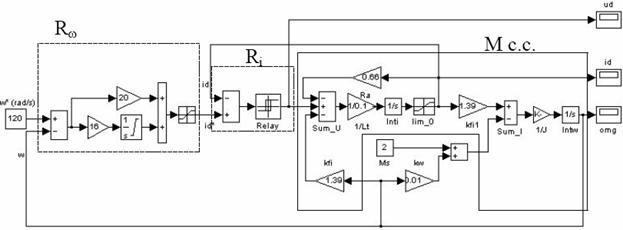
Integratorul din cadrul regulatorului de viteza este de tipul cu limitare, valoarea de saturatie fiind de ordinul 2IN, IN fiind curentul nominal al motorului de c.c. Pragurile de saturatie ale limitatorului final al acestui regulator trebuie setate la aceleasi valori ca si limitele integratorului.
Iesirea blocului Relay care semnifica comanda contactorului static din componenta VTC, poate fi transformata pentru a avea semnificatia tensiunii de alimentare a motorului (220V) ; valoarea histerezisului comparatorului se va selecta de ordinul 1A. Se seteaza parametrii osciloscoapelor si ai simularii astfel incat sa se poata urmari in timpul simularii influentele modificarii valorii cuplului static si a valorii prescrise a vitezei asupra raspunsului sistemului.
In figura urmatoare este prezentat un raspuns tipic pentru o pornire in gol (ms=2Nm) la 120 rad/s, urmata de un soc de cuplu de 20 Nm, apoi revenire in gol.

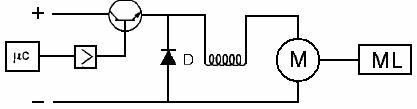
Calculul regimului dinamic
Se considera schema de mai jos care consista dintr-un motor cu excitatie independenta, un intreruptor a care se inchide si se deschide cu perioada T, timpul de inchidere fiind Tc (timpul de conductie sau timpul activ). Se utilizeaza dioda D pentru ca intreruperea curentului de catre intreruptorul a sa se faca cu arc electic cat mai redus ; energia inmagazinata in circuitul rotoric, pe durata de timp cat a fost inchis, intretine curentul iA, pe durata pauzei, pe drumul oferit de dioda D.
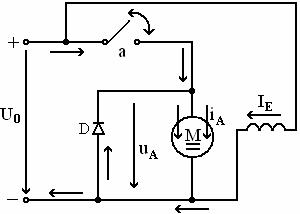
In intervalul de conducere, Tc, curentul iA creste, iar in intervalul de pauza, Tp, curentul scade(dar nu se anuleaza) ; in momentul in care intreruptorul se inchide din nou, iA>0. Deoarece curentul se micsoreaza oricat dar nu se anuleaza in nici un interval de timp, se va considera regimul de curent neintrerupt. Viteza W este practic constanta pe durata T.
Vom folosi urmatoarele ecuatii :
![]()
![]()
In intervalul de
conducere Tc : ![]()
In intervalul de pauza Tp: ![]() .
.
Se face media pe o perioada T=Tc+Tp a ecuatiilor de functionare si rezulta :
![]()
![]()
unde UA,IA,M,Ms sunt valorile medii pe perioada T pentru tensiunea la borne, curentul rotoric, cuplul electromagnetic, respectiv cuplul rezistent total.
Media pe o perioasa a tensiunii electromotoare de autoinductie este nula :
deoarece in regim permanent in intervalul Tc curentul creste exact cu cat va scadea in intervalul Tp, valoarea curentului la sfarsitul intervalului Tc fiind egala fiind valoarea initiala pentru intervalul Tp si invers.
Dar  ; notand raportul
; notand raportul ![]() ,
coeficientul subunitar
,
coeficientul subunitar ![]() numindu-se durata
relativa a pulsului (
numindu-se durata
relativa a pulsului (![]() =01), se obtine:
=01), se obtine: ![]() .
.
Conform acestei relatii, variind durata relativa a pulsului de tensiune se variaza viteza unghiulara la flux constant.
Caracteristicile mecanice care se obtin in regim de curent neintrerupt sunt prezentate in figura urmatoare :
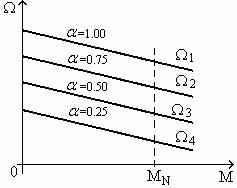
Expresia unei caracteristici oarecare este: ![]() .
.
La acelasi cuplu M, rezulta viteze unghiulare
diferite, in functie de ![]() .
.
Cand ![]() adica durata activa Tc
devine egala cu perioada T a impulsurilor, atunci se obtine regimul cunoscut de
tensiune uA, perfect constanta, caracteristica mecanica fiind cea
naturala, daca in circuitul rotoric nu intervin rezistente suplimentare.
adica durata activa Tc
devine egala cu perioada T a impulsurilor, atunci se obtine regimul cunoscut de
tensiune uA, perfect constanta, caracteristica mecanica fiind cea
naturala, daca in circuitul rotoric nu intervin rezistente suplimentare.
In schema urmatoare intreruptorul a a fost inlocuit utilizandu-se elemente de putere (tiristoare).Avantajul acestei scheme este ca, spre deosebire de un contactor obisnuit, nu are piese in miscare si nici nu uzeaza contactele, dradul de fiabilitate al schemei fiind foarte ridicat, desi realizeaza pulsuri de tensiune la frecventa mare (502000Hz).
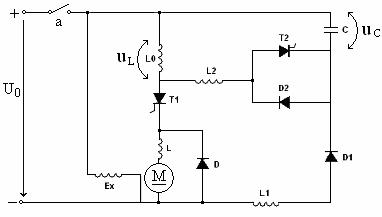
Acest contactor este un convertor de curent continuu, el realizand
transformarea energiei electrice de curent continuu tot in energie de curent
continuu, schimband valoarea tensiunii medii de la Uo la ![]() .
.
Tiristorul T1 este utilizat pentru a inlocui intreruptorul a, iar T2 este un tiristor auxiliar, cu rolul de a bloca primul tiristor dupa trecerea duratei Tc. Schema contine si doua circuite oscilante care utilizeaza condensatorul C si bobinele L0, L1 si L2. Diodele D1 si D2 au rolul de a stinge tiristoarele principale, dioda D preia curentul rotoric iA cand T1 se blocheaza. Folosind intreruptorului a se pune schema instare de functionare si se alimenteaza circuitul de excitatie al motorului M. Daca a se inchide, L1 este pusa sub tensiunea U0 a sursei circuitului oscilant.
Se noteaza uC tensiunea la bornele condensatorului C si ic curentul de incarcare ; se pot scrie ecuatiile :
![]()
![]()
din care
rezulta: ![]() cu conditiile initiale:
cu conditiile initiale: ![]() si
si ![]()
Dupa rezolvarea ecuatiei se obtin solutiile: ![]() si
si ![]() , unde
, unde ![]() .
.
Curentul ic pleaca de la valoarea 0, atinge maximul ωCU0, apoi scade devenind 0 la momnetul ωtc=p si ramane la aceasta valoare datorita diodei D1 care nu permite inversarea sensului curentului. Dupa incarcarea condensatorului C la tensiunea 2U0 (la momentul ωtc) se poate comanda aprinderea tiristorului T1. Daca T1 primeste impuls de aprindere, sursa genereaza curentul iA prin infasurarea rotorica. Considerand regim stationar, o constanta mare de timp a circuitului rotoric si un cuplu rezistent mare, se poate considera curentul iA constant si tensiunea la bornele motorului egala cu cea a sursei. Condensatorul este incarcat, tiristorul T2 si dioda D2 sunt blocati.
In momentul Tc , tiristorul auxiliar T2 primeste impuls de aprindere inchizand circuitul oscilant C, L0, L2 ; ecuatiile circuitului oscilant devin:
![]() si
si ![]()
obtinandu-se ecuatia: ![]()
Folosind conditiile initiale t=Tc, uc=2U0 si ic=0 rezulta :
![]() si
si ![]() cu
cu ![]()
Tensiunea la bornele bobinei L0 va fi : ![]()
Aprinderea tiristorului T2 conduce la punerea in opozitie a celor doua surse de energie din instalatie: sursa propiu zisa U0 si condensatorul C de tensiune initiala 2U0. Sursa mai mare pentru moment (condensatorul C) duce la blocarea tiristorului T1, deconectand infasurarea rotorica de la sursa propiu-zisa. Condensatorul continua sa se descarce, iar cand tensiunea la bornele sale devine nula, energia inmagazinata in campul electric al condensatorului se transfera in campul magnetic al bobinelor L0 si L2. Curentul ic poate fi mentinut in continuare in acelasi sens (bobinele se descarca) iar in momnetul t1 cand ic se anuleza, condensatorul se incarca in sens invers, avand tensiunea la borne (-2U0) iar tiristorul T2 se blocheaza. In acest moment condensatorul se poate descarca prin intermediul diodei D2, care permite trecerea curentului in sens invers si incarcarea bobinelor, pana cand uc devine din nou nul. Curentul continua in sensul permis de D2, pana cand toata energia din bobine se transfera inapoi la condensatorul C. Apoi oscilatia nu mai este posibila,condensatorul nu se mai poate descarca(curentul nu maipoate trece prin dioda D2), tiristorul T2 fiind blocat . In momentul ulterior lui t2, se poate da un impuls nou de aprindere lui T1, fenomenele reluandu-se.
Domenii de utilizare
Variatoarele de curent continuu au o utilizare diversificata; e folosesc atat la reglarea puterii si vitezei motoarelor de curent continuu, cat si la pornirea motoarelor asincrone cu rotorul bobinat cu rezistenta variabila in rotor, la franarea in regim de generator cu recuperarea energiei, la actionarea electrovehiculelor, n componenta unor surse de tensiune continua pentru alimentarea circuitelor telefonice din centralele digitale sau surse statice pentru servicii auxiliare de tractiune.
Unul dintre avantajele utilizarii chopperului este asociat reversibilitatii unora dintre schemele acestuia, astfel ca motorul alimentat prin chopper poate functiona si in regim de frana cu recuperarea energiei, lucru care face ca sistemul acesta de alimentare a motorului de c.c. sa fie utilizat in tractiunea electrica feroviara si urbana (metrou, tramvai, troleibus) si, practic fara concurenta, in cazul automobilului electric.
In regim de franare recuperativa de energie, masina trece de la functionarea in regim de de motor la regimul de generator, ramanand conectata la retea, iar turatia creste la valori mai mari decat ale turatiei de mers in gol; astfel masina primeste putere mecanica la arbore si o transforma in putere electrica, ce este injectata in retea. Variatoarele se utilizeaza de obicei in actionarile in care unica sursa de alimentare o reprezinta o baterie de elemente galvanice sau o baterie de acumulare. Schema electrica permite si recuperarea energiei in perioadele de franare, ceea ce mareste performnatele mai ales in cazul aplicatiilor cu franari dese (electrovehicole).
Utilizarea chopperului este din ce in ce mai frecventa in actionarile cu reglare automata, permitand ajustarea automata a parametrilor circuitului de comanda.
VTC se utilizeaza si la motoarele pentru masini de spalat, de prelucrat mancare sau masini electrice de gaurit, intrucat ajusteaza motorul intr-un singur sens de rotatie si nu permite scurtcircuitarea. Circuitul de control este simplificat prin folosirea tranzistorilor poarta izolati si a magnetilor permanenti pentru excitatia motorului care inlocuiesc infasurarea statorica, motorul avand astfel, o excitatie independenta.
O alta utilizare importanta a chopperelor este adaptarea puterii furnizate de panourile fotoelectrice la necesitatile sarcinii.
Bibliografie
Alexandru Fransua si Razvan Ungureanu - Masini si actionari electrice. Elemente de executie - Editura Tehnica, 1985.
Ivan Bogdanov - Microprocesorul in comanda actionarilor electrice - Editura Racla, 1989.
I. Dumitrache - Automatizari electronice - Editura Didactica si Pedagogica, 1993.
Cursurile de Electronica Analogica si Electronica Digitala.
https:// em.ucv.ro/Organizare/PaginiPersonale/SIvanov/Cursuri/LabMSSE/
https://encon.fke.utm.my/courses/see_5433/chopper.pdf
https://www.eu.necel.com/_pdf/U17101EE1V0AN00.PDF
https://www.educypedia.be/electronics/circuitsmotorcontrol.htm
Copyright © 2026 - Toate drepturile rezervate