|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
Specializarea: echipamente si instalatii de bord]
Tema
Sa se studieze giroorizontul cu corectii neliniare de tip releu ideal montat pe o platforma mobila cu viteza constanta, atingand urmatoarele puncte:
- trasarea
caracteristicilor a(t), b(t) si a b) cu si fara frecare,
neglijand sau nu ![]() si
si ![]() ;
;
pentru fiecare din situatiile de mai sus se
vor considera cazurile in care se neglijeaza sau nu ![]() si
si ![]() ;
;
Studiul fenomenelor giroscopice a fost fundamentat de catre Leonard Euler, care in anul 1765 a elaborat celebra teorie a miscarii solidului cu punct fix. Teoria giroscopului a fost continuata si dezvlotata de catre mecanicieni celebri: Lagrange, Poinsot, Sofia Kovalevskaia, Necrasov, Jukovski.
Echipamentele si sistemele giroscopice se utilizeaza pentru masurarea inclinarilor, directiilor, vitezelor unghiulare, acceleratiilor liniare si unghiulare, cuplurilor, vibratiilor. Ele mai pot fi folosite in cadrul sistemelor automate ca elemente integratoare si derivatoare. Sistemele giroscopice au o larga utilizare in pilotarea automata a aeronavelor in navigatia aeriana si maritima, in dirijarea rachetelor si vehiculelor spatiale, in stabilizarea miscarii aparatelor aerospatiale, in navigatia inertiala.
Giroscopul este un corp
rigid greu cu punct fix,cu simetrie de revolutie in repartitia masei care executa o miscare de precesie regulata,
avind viteza unghiulara de rotatie proprie (![]() ) orientata in lungul
axei de simetrie de revolutie.
) orientata in lungul
axei de simetrie de revolutie.
Echipamentele giroscopice pentru memorarea la bordul vehiculelor a verticalei adevarate a locului sunt cunoscute sub denumirea de echipamente giroscopice de verticala. Memorind directia verticalei locului, aceste echipamente permit masurarea unghiurilor de ruliu si tangaj. Echipamentele pentru determinarea vizuala a pozitiei aeronavei in raport cu planul orizontal local se numesc giroorizonturi, iar cele destinate formarii unor semnale electrice proportionale cu unghiurile de rului si tangaj se numesc giroverticaluri.
Echipamentele giroscopice de verticala sunt constituite in principal din giroscoape astatic rapide in suspensie cardaica exterioara (GAR). Suspensia este formata din doua cadre de suspensie, in care este montat giroscopul cu axa de rotatie proprie verticala.
Realizarea sensibilitatii giroscopului in raport cu verticala locului este obtinuta prin combinarea unui GAR cu pendulul fizic. O varianta este aceea in care centrul de masa al giroscopului este sub punctul de suspensie.
Din punct de vedere al amplasarii pe aeronava exista doua variante de echipamente giroscopice de verticala: 1) cu axa cadrului exterior paralela cu axa longitudinala a aeronavei; 2) cu axa cadrului exterior paralela cu axa transversala a aeronavei.. Varianta 1 este pentru avioanele civile de pasageri sau de transport iar varianta 2 este pentru avioanele de acrobatie.
In figura 1 este prezentata schema cinematica a echipamentului giroscopic de verticala. Sistemele de coordonate utilizate sunt:
Ox h z - triedrul orizontal legat de traiectoria de zbor avind axa Oh tangenta la traiectorie, Oz - axa verticala, Ox - axa perpendiculara pe axele Oh si Oz impreuna cu care formeaza un triedru rectangular drept;
oxyz- triedrul lui Resal legat de cadrul interior al suspensiei cardanice
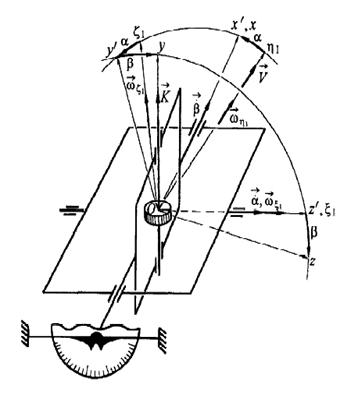
Fig. 1
Daca giroorizontul (GO) este neperturbat (α = β = 0), atunci triedrul RESAL oxyz se suprapune peste triedrul Ox h z . Giroorizontul perturbat trece succesiv din pozitia Ox h z in pozitia ox'y'z' si din pozitia ox'y'z' in pozitia oxyz.
 (1)
(1)
unde:
![]() ,
, ![]() ,
,![]() - proiectiile vitezelor unghiulare ale aeronavei pe cele
trei axe;
- proiectiile vitezelor unghiulare ale aeronavei pe cele
trei axe;
![]() - vitezele unghiulare
absolute in jurul axelor triedrului Ox h z
- vitezele unghiulare
absolute in jurul axelor triedrului Ox h z
W - viteza unghilara de rotatie a Pamantului;
j - unghiul de latitudine;
y - unghiul de directie;
c c - deviatii suplimentare ale giroorizontului;
R- raza Pamantului.
Ecuatiile de miscare:
 (2)
(2)
unde ![]() si
si ![]() sunt vitezele
unghiulare 'de frecare'(datorate momentelor de frecare uscata din axele
cadrelor suspensiei cardanice).
sunt vitezele
unghiulare 'de frecare'(datorate momentelor de frecare uscata din axele
cadrelor suspensiei cardanice).
Drept element sensibil pentru
sistemul de corectie se foloseste un comutator pendular cu lichid. Acesta
sesizeaza abaterea giroscopului fata de directia verticalei loculuisi furnizeaza
semnale proportionale cu abaterile verticalei locului in cele doua plane.Aceste
semnale, dupa o prealabila amplificare se aplica unor motoare de corectie,
dispuse dupa axele oz si ox. Motoarele de corectie creeaza o miscare de
precesie in sensul readucerii axei de rotatie de roatie proprie a giroscopului
(![]() ) dupa directia verticalei locului.
) dupa directia verticalei locului.
Elementul sensibil pendular se realizeaza in doua variante principale: 1) tubular cu trei electrozi din sarma si o picatura de mercur pentru realizarea contactului; 2) in forma de cuva plata cu patru electrozi circulari periferici si unul central, umpluta cu un lichid electroconductor, avand deasupra un spatiu liber.
In prima varianta, pentru a sesiza deviatiile giroscopului dupa axele longitudinala si transversala ale aeronavei, se prevad doua tuburi orientate de-a lungul celor doua axe, montate pe partea inferioara a cadrului interior de suspensie. Acest cadru imbraca rotorul giroscopic, motiv pentru care se numeste girocamera. Daca axa rotorului giroscopic este perfect verticala , atunci picaturile de mercur din cele doua tuburi sunt situate la mijlocul tuburilor, astfel ca nu se stabileste contactul dintre electrodul central si cei periferici. Daca se produce o abatere a axei giroscopulii de la verticala picaturile de mercur se vor deplasa actiunea propriei greutati, facind legatura intre electrodul central si unul din cei doi electrozi periferici.
Cea de-a doua varianta de elemnt sensibil asigura sesizarea atit a unghiului de tangaj cit si a celui de ruliu.In acest scop, cei patru electrozi se amplaseaza astfel incit doi electrozi opusi sa fie dispusi dupa axa longitudinala a aeronavei, iar ceilalti doi dupa axa transversala. Cuva se montreaza tot pe partea inferioara a girocamerei. Daca axa giroscopului este orientata riguros dupa verticala locului, cei patru electrozi au suprafetele egal acoperite de lichidul electroconductor. La inclinarea cuvei, lichidul va acoperii mai mult unii electrozi si ii va descoperii mai mult pe ceilalti. Astefel variaza rezistentele circuitelor dintre electrodul central si fiecare din cei patru electrozi periferici in functie de unghiul de abatere a giroscopului fata de verticala. Pentru unghiuri care depasesc aproximativ un grad, unii electrozi sunt complet descoperiti, iar altii complet acoperiti ceea ce face ca in continuare rezistenta dintre electrozi sa nu mai depinda de unghiul de inclinare.
Schema electrica a sistemului de corectie a unui giroorizont este data in figura 2. comutatorul pendular este reprezentat de rezistentele variabile R si R', iar motoarele de corectie sunt de tip bifazat, avand cate o infasurare de excitatie IE si cate doua infasurari de comanda IC, una pentru un sens al momentului de corectie si lata pentru celalalt sens. Sistemul de corectie actioneaza asupra giroscopului prin canalul de corectie transversala CT (format din elementele R', IC', si IE') si canalul de corectie longitudinala CL (format din elementele R, IC si IE). Canalul CT creeaza un cuplu de corectie dupa axa oz', iar canalul CL creeaza un cuplu de corectie dupa axa ox. Acest mod de actiune a corectiei este de tip radial.
Pentru exprimarea momentelor de corectie, se reprezinta giroorizontul numai prin girocamera in cele doua plane (figura 3): Oh z si Ox z . Elementele sensibile ale comutatorului pendular cu lichid sunt dispuse pe girocamera, dupa axele celor doua cadre ale suspensiei cardanice.
Conform fig 3 acceleratiile rezulatante dupa directiile axelor ox si oz au expresiile:
 (3)
(3)
unde componentele acceleratiei aparante au expresiile:
 (4)
(4)
Ecuatiile giroorizontului cu corectii de tip releu ideal sunt:
 (5)
(5)
unde ![]() , iar
, iar ![]() reprezinta vitezele unghiulare de corectie.
reprezinta vitezele unghiulare de corectie.
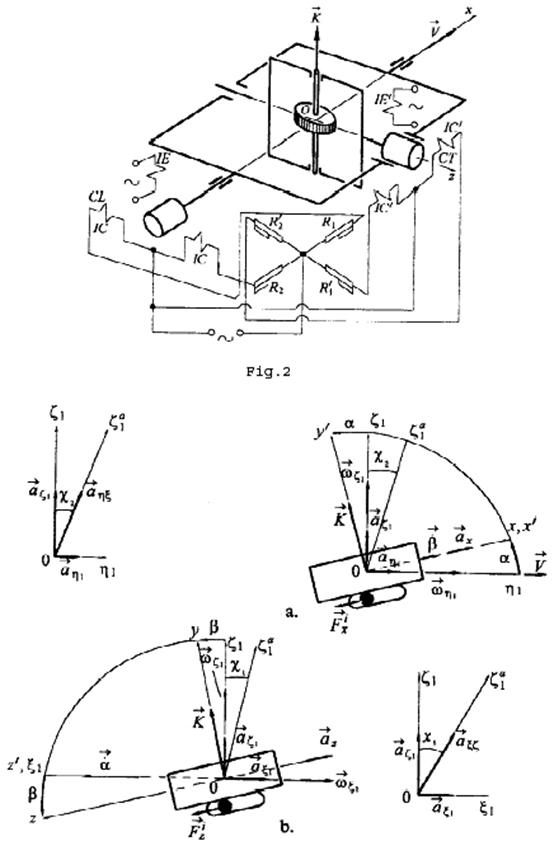
Fig. 3
Daca aeronava pe care este montat giroorizontul se
deplaseaza pe o traiectorie loxodroma sau ortodroma (arc de cerc mare) cu V =
const., ![]() = 0, zborul poate fi considerat rectiliniu (ψ ≈
const.). In ecuatia 5, neglijand termenii
= 0, zborul poate fi considerat rectiliniu (ψ ≈
const.). In ecuatia 5, neglijand termenii ![]() si
si ![]() aceasta devine:
aceasta devine:
 (6)
(6)
In pozitia de echilibru ![]() =
= ![]() = 0, β = χ1;
β este functie de V si φ in cazul miscarii pe ortodroma, respectiv
functie de V, φ, ψ si ρ in cazul miscarii pe loxodroma. Tinand
seama si de histerezis, in pozitia de echilibru
= 0, β = χ1;
β este functie de V si φ in cazul miscarii pe ortodroma, respectiv
functie de V, φ, ψ si ρ in cazul miscarii pe loxodroma. Tinand
seama si de histerezis, in pozitia de echilibru
α max = Δα, βmax = Δβ + χ1. (7)
In continuare se studiaza erorile giroorizontului pe urmatoarele cazuri:
Cazul 1: Cu fx 0 si fz
Cazul 1.1 Cu ![]()
Cazul 1.1.a. ![]()
Programul Matlab:
clear all;close all;
fi=(30*pi)/180;psi=(48*pi)/180;
omega=(4.167e-3)*pi/180;V=8000/36;R=64e5;g=9.81;
omegafx=0.15*(pi/180);omegafz=0.24*(pi/180);
omegacx=0.2*(pi/180);omegacz=0.3*(pi/180);
eps1=(5/60)/0.5;eps2=(3/60)/0.5;
ro=R*cos(fi);a=-2.5;r=1e3;
omegacsi1=0;omegaeta1=0;omegazita1=omega*sin(fi)+(V/ro);
hi1=(abs(-2*omega*V*sin(fi)))/g;hi2=0;
sim('ideal');
t=1:length(alfa);
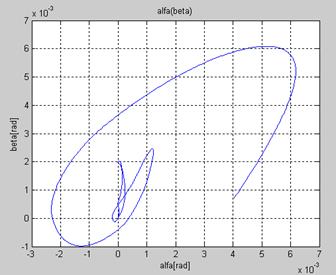
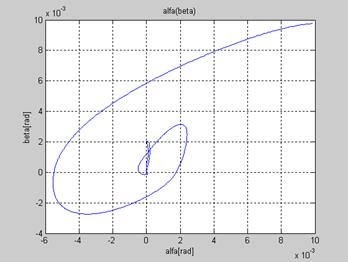
h=figure;plot(t,alfa);title('alfa(t)');xlabel('timp[s]');ylabel('alfa[rad]');grid;
h=figure;plot(t,beta);title('beta(t)');xlabel('timp[s]');ylabel('beta[rad]');grid;
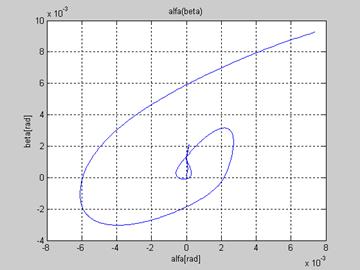
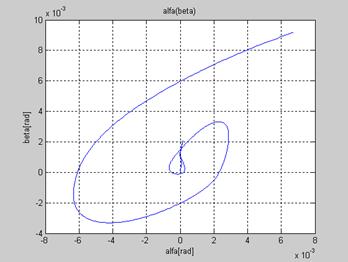
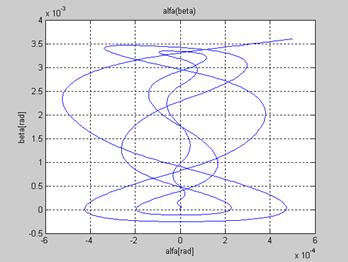
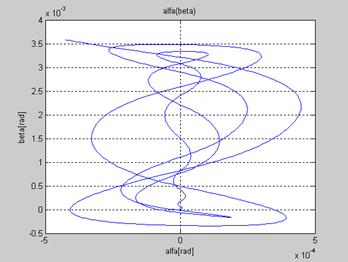
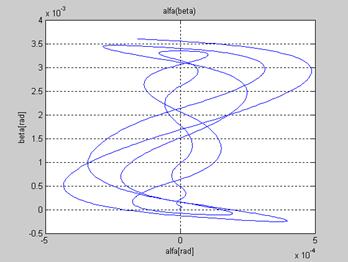
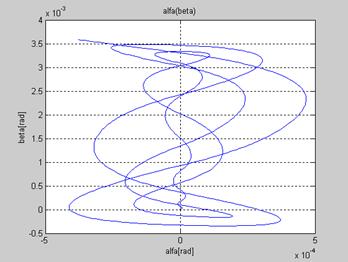
h=figure;plot(alfa,beta);title('alfa(beta)');xlabel('alfa[rad]');ylabel('beta[rad]');grid;
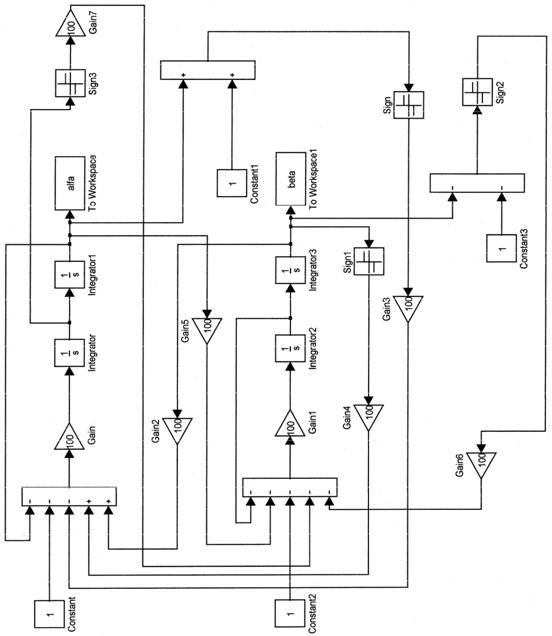
Schema simulink:
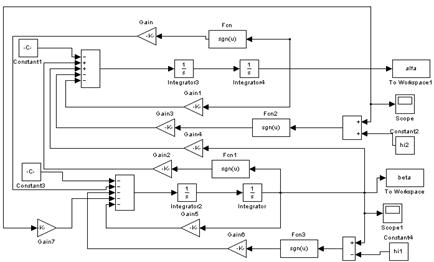
Figura 1.
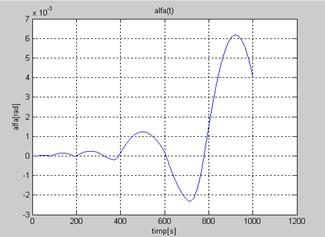
Figura 2.
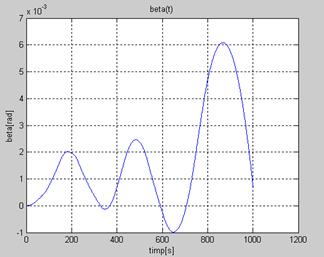
Figura 3.
Cazul 1.1.b. ![]()
Programul Matlab:
clear all;close all;
fi=(30*pi)/180;psi=(48*pi)/180;
omega=(4.167e-3)*pi/180;V=8000/36;R=64e5;g=9.81;
omegafx=0.15*(pi/180);omegafz=0.24*(pi/180);
omegacx=0.2*(pi/180);omegacz=0.3*(pi/180);
eps1=(5/60)/0.5;eps2=(3/60)/0.5;
ro=R*cos(fi);a=-2.5;r=1e3;
omegacsi1=-omega*cos(fi)*sin(psi)-(V/R);
omegaeta1=omega*cos(fi)*cos(psi);
omegazita1=omega*sin(fi)+(V/ro);
hi1=(abs(-2*omega*V*sin(fi)))/g;hi2=0;
sim('ideal');
t=1:length(alfa);
h=figure;plot(t,alfa);title('alfa(t)');xlabel('timp[s]');ylabel('alfa[rad]');grid;
h=figure;plot(t,beta);title('beta(t)');xlabel('timp[s]');ylabel('beta[rad]');grid;
h=figure;plot(alfa,beta);title('alfa(beta)');xlabel('alfa[rad]');ylabel('beta[rad]');grid;
Schema simulink:
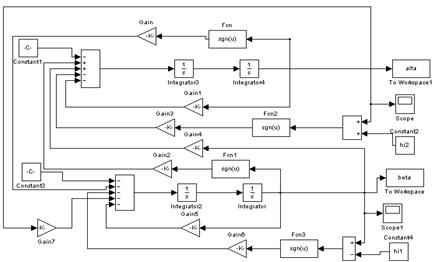
Figura 1.
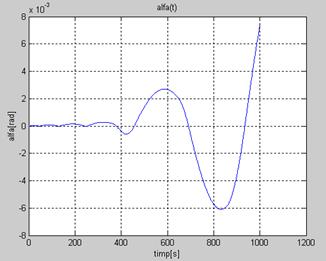
Figura 2.
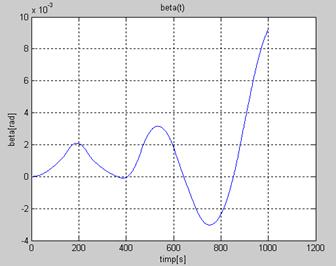
Figura 3.
Cazul 1.2 Cu ![]()
Cazul 1.2.a. ![]()
Programul Matlab
clear all;close all;
fi=(30*pi)/180;psi=(48*pi)/180;
omega=(4.167e-3)*pi/180;V=8000/36;R=64e5;g=9.81;
omegafx=0.15*(pi/180);omegafz=0.24*(pi/180);
omegacx=0.2*(pi/180);omegacz=0.3*(pi/180);
eps1=(5/60)/0.5;eps2=(3/60)/0.5;
ro=R*cos(fi);a=-2.5;r=1e3;
omegacsi1=0;omegaeta1=0;omegazita1=omega*sin(fi)+(V/ro);
hi1=(abs(-2*omega*V*sin(fi)))/g;hi2=0;
sim('ideal1');
t=1:length(alfa);
h=figure;plot(t,alfa);title('alfa(t)');xlabel('timp[s]');ylabel('alfa[rad]');grid;
h=figure;plot(t,beta);title('beta(t)');xlabel('timp[s]');ylabel('beta[rad]');grid;
h=figure;plot(alfa,beta);title('alfa(beta)');xlabel('alfa[rad]');ylabel('beta[rad]');grid;
Schema simulink:
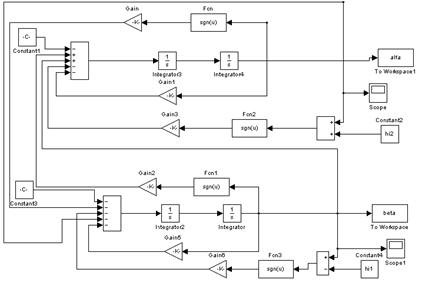
Figura 1.
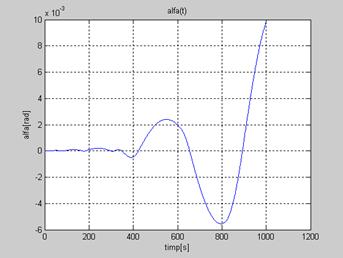
Figura 2.
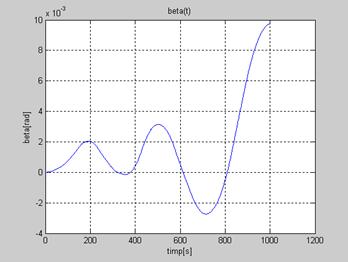
Figura 3.
Cazul 1.2.b. ![]()
Programul Matlab:
clear all;close all;
fi=(30*pi)/180;psi=(48*pi)/180;
omega=(4.167e-3)*pi/180;V=8000/36;R=64e5;g=9.81;
omegafx=0.15*(pi/180);omegafz=0.24*(pi/180);
omegacx=0.2*(pi/180);omegacz=0.3*(pi/180);
eps1=(5/60)/0.5;eps2=(3/60)/0.5;
ro=R*cos(fi);a=-2.5;r=1e3;
omegacsi1=-omega*cos(fi)*sin(psi)-(V/R);
omegaeta1=omega*cos(fi)*cos(psi);
omegazita1=omega*sin(fi)+(V/ro);
hi1=(abs(-2*omega*V*sin(fi)))/g;hi2=0;
sim('ideal1');
t=1:length(alfa);
h=figure;plot(t,alfa);title('alfa(t)');xlabel('timp[s]');ylabel('alfa[rad]');grid;
h=figure;plot(t,beta);title('beta(t)');xlabel('timp[s]');ylabel('beta[rad]');grid;
h=figure;plot(alfa,beta);title('alfa(beta)');xlabel('alfa[rad]');ylabel('beta[rad]');grid;
Schema simulink:
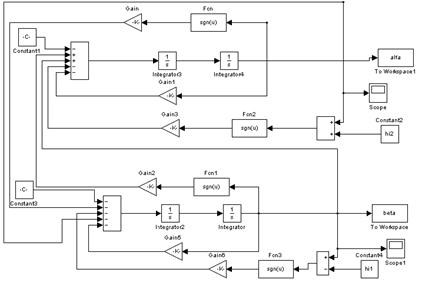
Figura 1.
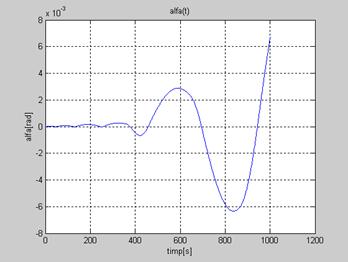
Figura 2.
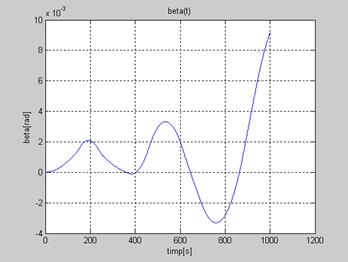
Figura 3.
Cazul 2: Cu fx 0 si fz
Cazul 2.1 Cu ![]()
Cazul 2.1.a. ![]()
Programul Matlab:
clear all;close all;
fi=(30*pi)/180;psi=(48*pi)/180;
omega=(4.167e-3)*pi/180;V=8000/36;R=64e5;g=9.81;
omegafx=0;omegafz=0;
omegacx=0.2*(pi/180);omegacz=0.3*(pi/180);
eps1=(5/60)/0.5;eps2=(3/60)/0.5;
ro=R*cos(fi);a=-2.5;r=1e3;
omegacsi1=0;omegaeta1=0;omegazita1=omega*sin(fi)+(V/ro);
hi1=(abs(-2*omega*V*sin(fi)))/g;
hi2=0;
sim('ideal');
t=1:length(alfa);
h=figure;plot(t,alfa);title('alfa(t)');xlabel('timp[s]');ylabel('alfa[rad]');grid;
h=figure;plot(t,beta);title('beta(t)');xlabel('timp[s]');ylabel('beta[rad]');grid;
h=figure;plot(alfa,beta);title('alfa(beta)');xlabel('alfa[rad]');ylabel('beta[rad]');grid;
Schema simulink:
Figura 1.
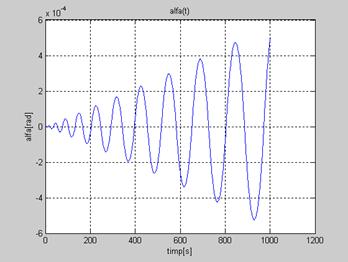
Figura 2.
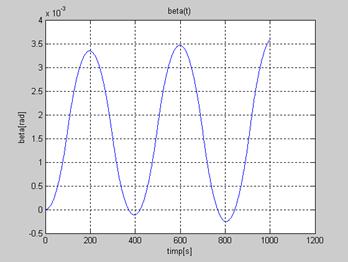
Figura 3.
Cazul 2.1.b. ![]()
Programul Matlab:
clear all;close all;
fi=(30*pi)/180;psi=(48*pi)/180;
omega=(4.167e-3)*pi/180;V=8000/36;R=64e5;g=9.81;
omegafx=0;omegafz=0;
omegacx=0.2*(pi/180);omegacz=0.3*(pi/180);
eps1=(5/60)/0.5;eps2=(3/60)/0.5;
ro=R*cos(fi);a=-2.5;r=1e3;
omegacsi1=-omega*cos(fi)*sin(psi)-(V/R);
omegaeta1=omega*cos(fi)*cos(psi);
omegazita1=omega*sin(fi)+(V/ro);
hi1=(abs(-2*omega*V*sin(fi)))/g;hi2=0;
sim('ideal');
t=1:length(alfa);
h=figure;plot(t,alfa);title('alfa(t)');xlabel('timp[s]');ylabel('alfa[rad]');grid;
h=figure;plot(t,beta);title('beta(t)');xlabel('timp[s]');ylabel('beta[rad]');grid;
h=figure;plot(alfa,beta);title('alfa(beta)');xlabel('alfa[rad]');ylabel('beta[rad]');grid;
Schema simulink:
Figura 1.
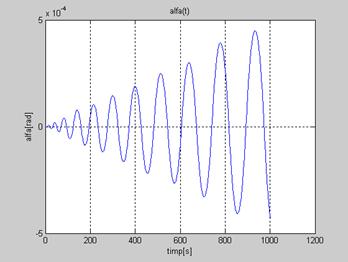
Figura 2.
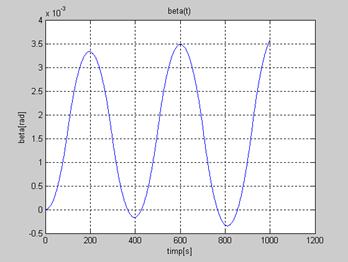
Figura 3.
Cazul 2.2 Cu ![]()
Cazul 2.2.a. ![]()
Programul Matlab:
clear all;close all;
fi=(30*pi)/180;psi=(48*pi)/180;
omega=(4.167e-3)*pi/180;V=8000/36;R=64e5;g=9.81;
omegafx=0;omegafz=0;
omegacx=0.2*(pi/180);omegacz=0.3*(pi/180);
eps1=(5/60)/0.5;eps2=(3/60)/0.5;
ro=R*cos(fi);a=-2.5;r=1e3;
omegacsi1=0;omegaeta1=0;omegazita1=omega*sin(fi)+(V/ro);
hi1=(abs(-2*omega*V*sin(fi)))/g;hi2=0;
sim('ideal1');
t=1:length(alfa);
h=figure;plot(t,alfa);title('alfa(t)');xlabel('timp[s]');ylabel('alfa[rad]');grid;
h=figure;plot(t,beta);title('beta(t)');xlabel('timp[s]');ylabel('beta[rad]');grid;
h=figure;plot(alfa,beta);title('alfa(beta)');xlabel('alfa[rad]');ylabel('beta[rad]');grid;
Schema simulink:
Figura 1.
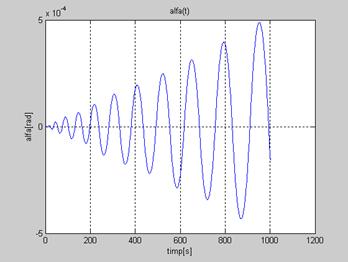
Figura 2.
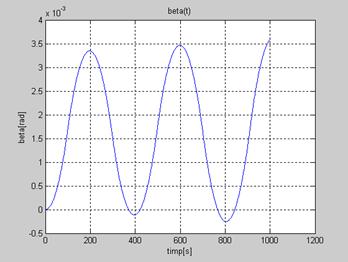
Figura 3.
Cazul 2.2.b. ![]()
Programul Matlab:
clear all;close all;
fi=(30*pi)/180;psi=(48*pi)/180;
omega=(4.167e-3)*pi/180;V=8000/36;R=64e5;g=9.81;
omegafx=0;omegafz=0;
omegacx=0.2*(pi/180);omegacz=0.3*(pi/180);
eps1=(5/60)/0.5;eps2=(3/60)/0.5;
ro=R*cos(fi);a=-2.5;r=1e3;
omegacsi1=-omega*cos(fi)*sin(psi)-(V/R);
omegaeta1=omega*cos(fi)*cos(psi);
omegazita1=omega*sin(fi)+(V/ro);
hi1=(abs(-2*omega*V*sin(fi)))/g;hi2=0;
sim('ideal1');
t=1:length(alfa);
h=figure;plot(t,alfa);title('alfa(t)');xlabel('timp[s]');ylabel('alfa[rad]');grid;
h=figure;plot(t,beta);title('beta(t)');xlabel('timp[s]');ylabel('beta[rad]');grid;
h=figure;plot(alfa,beta);title('alfa(beta)');xlabel('alfa[rad]');ylabel('beta[rad]');grid;
Schema simulink:
Figura 1.
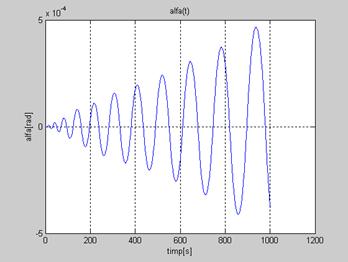
Figura 2.
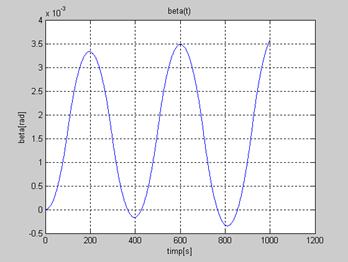
Figura 3.
Copyright © 2026 - Toate drepturile rezervate