|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
ECHIPAMENTE SI SISTEME HIDROPNEUMATICE DE BORD
TEMA
- PROIECTAREA INSTALATIEI HIDRAULICE DE ACTIONARE A ELEROANELOR, PROFUNDOARELOR SI A DIRECTIEI PENTRU AVIONUL IILYUSHIN II-86
Sistemul de comanda este de tip ,,Fly by wire", cu comenzi electrice date de la mansa, respectiv de la palonier. Proiectul nu include sistemul de dublare a comenzii. Sursa hidraulica contine sistemul principal de alimentare, sistemul de avarie si un sistem de urgenta alimentat de la reteaua electrica.
Proiectul va cuprinde urmatoarele etape:
-definirea geometriei suprafetelor de comanda actionate(eleroane, profundor, directie)
-estimarea fortelor necesare actionarii fiecarei suprafete
-alegerea presiunii nominale a instalatiei hidraulice proiectate
-calculul si alegerea cilindrilor hidraulici de actionare
-calculul debitelor necesare actionarilor
-calculul pulsatiilor de rezonanta ale suprafetelor de comanda
-alegerea servovalvei electrohidraulice
-estimarea functiei de transfer a servovalvei electrohidraulice
-alegerea traductoarelor de pozitie
-stabilirea schemei bloc si a functiei de transfer a sistemelor de actionare proiectate
-dimensionarea surselor hidraulice
-simularea in SIMULINK a sistemelor de actionare proiectate
Proiectul va contine urmatoarele:
-desenele cu definirea geometrica a suprafetelor de comanda
-schemele bloc ale instalatiilor proiectate
-schema instalatiei hidraulice proiectate
-pozitionarea pe avion a instalatiilor proiectate
DATELE TEHNICE ALE AVIONULUI
|
LUNGIMEA [m] |
59.54 |
|
ANVERGURA [m] | |
|
ÎNALTIMEA [m] | |
|
SUPRAFATA PORTANTA [m2] | |
|
MASA GOL[Kg] | |
|
CANTITATE COMBUSTIBIL[Kg] | |
|
VITEZA MAXIMA[km/h] | |
|
MASA MAXIMA DE DECOLARE[Kg] |
1. ALEGEREA PRESIUNII NOMINALE A INSTALATIEI DE ACTIONARE PROIECTATE
Presiunea nominala a instalatiei proiectate se alege in functie de sirul de presiuni specificate in standardul ISO 2944. In alegerea presiunii nominale se tine cont de urmatoarele consideratii si recomandari.
Un parametru foarte important in proiectarea instalatiilor hidraulice de aviatie este greutatea totala a instalatiei. O presiune de lucru ridicata presupune conducte cu pereti mai grosi, deci creste greutatea instalatiei datorita conductelor, dar scade datorita diametrelor necesare mai mici ale cilindrilor hidraulici. Cilindrii hidraulici cu diametre mai mici necesita debite de actionare mai mici, deci si pompele vor avea dimensiuni mai mici. Urmarind acelasi rationament, presiuni mai mici de lucru vor duce la scaderea greutatii conductelor, dar la cresterea greutatii cilindrilor si pompelor hidraulice. Va exista deci o presiune optima, care se situeaza in intervalul de 150-300 bar.
La avioanele mai vechi presiunea nominala a instalatiei hidraulice era uzual de 150 bar. La avioanele moderne aceasta a crescut si este in cele mai multe cazuri de 200 bar. Exista si avioane cu presiunea nominala a instalatiei hidraulice de 250 bar.
Un alt considerent important pe care se alege presiunea nominala a instalatiei hidraulice este prezenta servovalvelor hidraulice pentru comanda profundorului, eleroanelor si a stabilizatorului. In cataloagele firmelor care produc astfel de echipamente se recomanda ca la debitul maxim comandat sa se obtina o cadere de presiune pe servovalva de aproximativ 30% din presiunea de alimentare. In multe cazuri, in cataloagele de servovalve electrohidraulice se specifica o presiune maxima de alimentare fie de 210 fie de 350 bar. In functie de aceste valori se poate alege si presiunea hidraulica in instalatia hidraulica proiectata.
In plus, pe conductele si echipamentele hidraulice dintre pompa si consumatori apar caderi de presiune, astfel incat la cilindrii hidraulici va ajunge o presiune considerabil mai mica decat cea de la refularea pompei. Deci se poate estima aceasta cadere de presiune la aproximativ 20% din presiunea la refularea pompei. Deci se poate spune ca presiunea de la refularea pompei este cu aproximativ 50% mai mare decat presiunea care ajunge la cilindrul de actionare.
Pentru instalatia proiectata se alege una din valorile standardizate din intervalul 150-350 bar.
S-a ales presiunea nominala standardizata de: 250 bar.
2. DIMENSIONAREA CILINDRILOR HIDRAULICI
Pentru dimensionarea cilindrilor hidraulici este necesara forta maxima necesara actionarii proiectate
(forta de proiectare Fp). Aceasta este data de formula:
FP= FL + FA + FE + FS (1)
In care:
FL - forta datorata sarcinii propriu-zise a actionarii. In cazul de fata este forta necesara invingerii fortelor aerodinamice pe suprafata de comanda, in regim normal de zbor. Aceasta forta a fost specificata in datele de intrare ale proiectului.
FA - forta necesara invingerii fortelor de inertie ale elementului actionat. Poate avea valori importante in cazul in care elementul actionat are miscari cu acceleratii mari. Este si cazul de fata, cand suprafetele de comanda trebuie sa raspunda intr-un timp foarte scurt la comenzile primite de pilot. Se calculeaza conform formulei (2).
FE - forta necesara invingerii diferitelor perturbatii aparute in functionare. In cazul de fata acestea sunt reprezentate de fortele aerodinamice datorate rafalelor de vant.
FS - forta necesara invingerii frecarii uscate din sistemele de etansare ale cilindrului hidraulic.
Forta FA se calculeaza cu formula:
FA=M.a (2)
in care M
- masa suprafetei de comanda redusa la tija cilindrului de
actionare. Urmarind figura 1, aceasta se calculeaza
considerand momentul necesar actionarii suprafetei de comanda
care are momentul de inertie J fata de axa sarnierei, cu
acceleratia unghiulara maxima εmax. Acest moment este egal
cu forta FA inmultita
cu bratul sau in situatia cea mai defavorabila, adica
suprafata de comanda bracata la unghiul maxim θmax.
In aceasta situatie rezulta direct FA.
Proiectia acceleratiei ![]() pe directia axei
cilindrului hidraulic este:
pe directia axei
cilindrului hidraulic este:
Acceleratia punctului de articulatie intre cilindru si suprafata de comanda este:
![]() (4)
(4)
α![]()
α![]()
α![]()
|
ELERON |
PROFUNDOR |
DIRECTIE |
|
|
a [m/ |
Fig1
Pentru estimarea acceleratiei
unghiulare ![]() se considera cursa totala a suprafetei de
comanda si timpul necesar parcurgerii acesteia cu viteza unghiulara
maxima, ceruta in datele de proiectare.
se considera cursa totala a suprafetei de
comanda si timpul necesar parcurgerii acesteia cu viteza unghiulara
maxima, ceruta in datele de proiectare.
![]() =1.10 sec
=1.10 sec
![]()
![]() =1.50 sec
=1.50 sec
(5)
Pentru profundor ![]()
Pentru directie ![]()
Pentru eleron ![]()
Se considera timpul de accelerare (ta) egal cu 0,15 din timpul tc si rezulta acceleratia unghiulara maxima
![]() ; (6)
; (6)
![]()
![]()
![]()
|
ELERON |
PROFUNDOR |
DIRECTIE |
|
|
|
Forta FE datorata efectelor rafalelor asupra suprafetei de comanda se calculeaza pe considerente aerodinamice. Un calcul al acestor forte necesita un volum de calcul nejustificat pentru proiect, ca urmare se estimeaza ca fiind 0,2FL.
![]() [N]
[N]
![]() [N]
[N]
![]() [N]
[N]
Forta Fs datorata frecarilor dintre tija cilindrului si elementele de etansare, in absenta altor date mai exacte se estimeaza procentual din forta maxima furnizata de cilindrul hidraulic.
FS=0,1Fmax. (7)
Deoarece in forta maxima pe care trebuie sa o furnizeze cilindrul hidraulic apar si fortele
mentionate mai sus, se poate considera
FS=0,15FL. (8)
|
ELERON |
PROFUNDOR |
DIRECTIE |
|
|
FL [N] | |||
|
FA [N] | |||
|
FE [N] | |||
|
FS [N] |
937.115 |
||
|
FP [N] |
Dimensionarea cilindrilor hidraulici se face pe baza fortei necesare actionarii proiectate FP.
In paragraful privind alegerea presiunii nominale a instalatiei hidraulice s-a specificat faptul ca la debitul maxim este necesar ca sa existe o cadere de presiune pe servovalva egala cu 30% din presiunea sa de alimentare. De asemenea s-a estimate o cadere de presiune pe conducte si pe celelalte echipamente ale sistemului hidraulic de 20% din presiunea nominala a instalatiei. Din aceste considerente cilindrul hidraulic se dimensioneaza astfel incat sa poata furniza o forta cu 50% mai mare decat cea necesara, la presiunea nominala a instalatiei hidraulice.
Fcalcul = FP. (9)
In cazul actionarii proiectate s-a considerat ca aceeasi forta maxima la ambele curse ale cilindrului hidraulic. Forta data de cilindrul hidraulic este proportionala cu aria efectiva a pistonului, care in cazul cursei de retragere a tijei este
![]() (10)
(10)
Se tine cont de presiunea nominala a instalatiei hidraulice pa aleasa la punctul anterior si se calculeaza aria necesara:
![]() (11)
(11)
Deoarece eleroanele si profundoarele sunt impartite in doua formula ariei necesare devine:
![]()
![]()
![]()
![]()
Se estimeaza si ca urmare rezulta :
si ca urmare rezulta :
![]()
 (12)
(12)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
ELERON |
PROFUNDOR |
DIRECTIE |
|
|
| |||
|
|
8.223 |
Se merge in
catalogul de cilindri hidraulici si se cauta cilindrii dintr-o serie cu
presiunea nominala mai mare sau egala cu presiunea nominala a instalatiei
hidraulice pa. Se alege un
cilindru hidraulic care are ![]() . Se citesc pentru aceasta diametrele
. Se citesc pentru aceasta diametrele ![]() si
si ![]() pentru tipul respectiv de cilindru.
pentru tipul respectiv de cilindru.
|
ELERON |
PROFUNDOR |
DIRECTIE |
|
|
| |||
|
|
Se verifica apoi
forta furnizata de acesta la presiunea nominala pa. Se tine cont de randamentul cilindrului hidraulic,
care in mod uzual este de ordinul :![]() . Se calculeaza
. Se calculeaza
![]() (13)
(13)
![]() cilindrii hidraulici
respectivi corespund din punct de vedere al fortei capabile.
cilindrii hidraulici
respectivi corespund din punct de vedere al fortei capabile.
In documentatia de utilizare a servovalvelor electrohidraulice se recomanda ca raportul dintre ariile efective ale cilindrului hidraulic in situatia de retragere si de extensie a tijei sa fie mai mic decat 2. Acest lucru este justificat deoarece bucla de reactie este aceeasi pentru ambele curse si neindeplinirea acestei conditii poate duce la comportari necorespunzatoare ale sistemului (suprareglaje prea mari sau timpi de raspuns prea mari) in cazul uneia din cursele suprafetei de comanda.
Se verifica deci pentru cilindrul ales conditia:
 . (14)
. (14)
Se aleg pentru actionarea proiectata sistemele de prindere pe structura avionului si pe suprafata de comanda dintre cele disponibile in catalog. In mod uzual, in aviatie, prinderea cilindrului se face cu articulatie cilindrica iar prinderea tijei se face cu articulatie cilindrica prevazuta cu rulment oscilant. In acest caz, deoarece fortele necesare actionarii sunt mari, se utilizeaza, atat pentru prinderea cilindrului cat si pentru prinderea tijei, sistemul cu articulatie cilindrica.
Codul cilindrului hidraulic ales conform specificatiei din catalogul firmei HERVIL:
- pentru eleron:

- pentru profundor:

- pentru directie:

3. CALCUL DEBITELOR NECESARE ACTIONARII
Calculul debitelor necesare actionarii hidraulice se face la viteza maxima necesara actionarii. Ca urmare, debitul necesar unui cilindru hidraulic va fi
![]() (15)
(15)
|
ELERON |
PROFUNDOR |
DIRECTIE |
|
|
Qnec [l/min] |
Aria efectiva a pistonului se ia in acest caz
![]()
![]()
deoarece debitul maxim absorbit va fi la cursa de iesire a tijei. Servovalva va fi dimensionata la acest debit, urmand sa se calculeze performantele sistemului si pentru cursa de retragere a tijei. În cel de-al doilea caz viteza de bracaj a suprafetei de comanda va rezulta superioara celei impuse.
Viteza maxima de deplasare a tijei va fi
![]() (16)
(16)
![]() [m/s]
[m/s]
![]() [m/s]
[m/s]
![]() [m/s]
[m/s]
|
ELERON |
PROFUNDOR |
DIRECTIE |
|
|
b[m] | |||
|
| |||
|
|
În vederea alegerii ulterioare a servovalvei se calculeaza caderea de presiune pe cilindrul hidraulic la incarcarea maxima. Aceasta cadere de presiune se estimeaza cu formula
 (17)
(17)
PL el=![]()
PL pr=![]()
PL dir= ![]()
|
ELERON |
PROFUNDOR |
DIRECTIE |
|
|
PL[bar] |
Se calculeaza debitul pentru care trebuie sa il furnizeze servovalva in conditii de incarcare nula
 (18)
(18)
![]()
si debitul de referinta al servovalvei, la o cadere de presiune pe servovalva de 70 bar
![]() l/min
l/min
![]() l/min
l/min
![]() l/min
l/min
|
ELERON |
PROFUNDOR |
DIRECTIE |
|
|
QNL [l/min] |
![]() (19)
(19)
|
ELERON |
PROFUNDOR |
DIRECTIE |
|
|
|
În cazul in care se va alege o supapa proportionala pentru comanda suprafetelor de comanda se considera caderea de presiune de referinta cu 10,5 bar. Deoarece fortele si debitele necesare rezulta de valori relativ mari, pentru aceasta aplicatie se va alege o servovalva, nu o supapa proportionala.
Rezultatele pentru toate cele cinci servovalve necesare se transforma in l/min si se trec intr-un tabel ca mai jos.
Tabelul 2.Debitele necesare actionarii suprafetelor de comanda
|
Nr crt |
Actionarea |
Debitul de referinta al servovalvei(l/min) |
|
Eleron stanga | ||
|
Eleron dreapta | ||
|
Profundor stanga | ||
|
Profundor dreapta | ||
|
Directie | ||
|
Debit total necesar(l/min) | ||
Debitul eleronului si al profundorului s-a inmultit cu 2 deoarece suprafetele de comanda sunt impartite in doua.
4. CALCULUL PULSATIILOR DE REZONANTA ALE ACTIONARII SUPRAFETELOR DE COMANDA
Pulsatia de rezonanta a suprafetelor de comanda este importanta in alegerea servovalvei electrohidraulice. În comanda unui sistem electrohidaulic se poate prescrie marimea de comanda de catre un oprator uman, sisemul functionand fara bucla de reglare automata, sau comanda poate fi data de un sistem automat in care exista o bucla de reglare automata. În cazul unui siste automat cu bucla de reglare, cum este si cel utilizat in aceasta aplicatie, actionarea suprafetelor de comanda este mult mai rapida si mai precisa, dar necesita o servovalva cu perfomante mai ridicate. Pentru un sistem cu performante optime, frecventa la care servovalva produce un defazaj de 90° trebuie sa depaseasca frecventa proprie a sistemului mecanic actionat de cel putin trei ori. Frecventa de rezonanta a sistemului mecanic este determinat de rigiditatea echivalenta KA, care este rezultatul suprapunerii rigiditatii hidraulice K0 si a rigiditatii structurii aeronavei Ks.
Rigiditatea hidraulica a unui verin deplasat din pozitia mediana cu distanta x de poate calcula conform figurii urmatoare:
Considerand lichidul hidraulic blocat in camerele verinului, putem calcula rigiditatea acestuia calculand forta care apare la deplasarea cu distanta x. Forta care apare se datoreaza comprimarii lichidului in camera din dreaata si destinderii lichidului din camera din stanga. Daca initial presiunile in camerele cilindrului erau p1 si p2 se pot calcula utilizand ecuatia de stare a lichidului hidraulic.
![]() (20)
(20)
În care E este modulul de elasticitate al lichidului hidraulic.
Variatia presiunii cu Δp va produce o variatia de densitate Δρ data de relatia
![]() (21)
(21)
Variatia de densitate Δρ se poate calcula cu relatia

In valoare absoluta variatiile de
densitate ale lichidului hidraulic sunt foarte mici, astfel incat se
poate face aproximatia ![]() . Utilizand aceasta arpoximatie rezulta
. Utilizand aceasta arpoximatie rezulta
 Pentru camera din stanga
Pentru camera din stanga ![]() si
si
![]() iar pentru camera din dreapta
iar pentru camera din dreapta ![]() si
si
![]() .
Vconducta reprezinta volumul de lichid aflat intre
stutul servovalvei si camera corespunzatoare a cilindrului
hidraulic. Forta care apare la deplasarea Δx a pistonului este
.
Vconducta reprezinta volumul de lichid aflat intre
stutul servovalvei si camera corespunzatoare a cilindrului
hidraulic. Forta care apare la deplasarea Δx a pistonului este

si rezulta rigiditatea K0 a cilindrului hidraulic de forma
 (22)
(22)
Pentru situatia din figura rigiditatea variaza ca in figura 3.
Se observa ca maximul se obtine la x=0, deci rigiditatea utilizata pentru calculul frecventei maxime de rezonanta va fi
 (23)
(23)
Volumul Vconducta se poate
aproxima considerand ca intre servovalva si
cilindrul hydraulic se afla o conducta de lungimea ![]() si de diametru
interior
si de diametru
interior ![]() . Rezulta
. Rezulta ![]() cm3 =
cm3 = ![]() m3.
m3.
Avand in vedere ca structurile
aeronautice sunt foarte elastice, se poate aproxima in acest proiect,
in absenta altor date, ca rigiditatea structurii ![]()
În concluzie, pentru calculul frecventelor de rezonanta ale actionarii suprafetelor de comanda se procedeaza in modul urmator:
Se calculeaza pentru cilindrul hidraulic ales ariile A1 si A2 cu relatiile
![]()
![]() (24)
(24)
eleron:![]()
profundor, directie:![]()
eleron:![]()
profundor,directie:![]()
Se aproximeaza volumul de lichid aflat pe conducte asa cum am specificat mai sus;
Se considera un modul de elasticitate mediu pentru lichidul hydraulic (E=200MPa);
Se citeste cursa pistonului pentru cilindrul hidraulic ales;
Se calculeaza rigiditatea hidraulica K0 cu relatia (29);
Eleron:![]()
Profundor:![]()
Directie:![]()
Se aproximeaza rigiditatea structurii ![]()
![]()
eleron:![]()
profundor:![]()
directie:![]()
Se calculeaza frecventa de rezonanta, in care se considera masa M egala cu masa redusa a suprafetei de comanda la tija cilindrului, calculata la punctul 2 cu formula (4).
![]()
eleron:![]()
profundor:![]()
directie:![]()
Cunoscand frecventele de rezonanta ale actionarii suprafetelor de comanda este importanta nu numai pentru dimensionarea sistemului hidraulic(in special pentru alegerea servovalvei) ci si pentru fenomenele aeroelastice ale suprafetelor de comanda. La apropierea de regimul transonic apar unde de soc lambda pe aripa. Acestea induc pe suprafetele de comanda fenomenul de buzz-flutter. Suprapunerea frecventei de rezonanta a actionarii pentru frecventa de buzz-flutter poate duce la distrugerea suprafetei de comanda.
5. ALEGEREA SERVOVALVELOR ELECTROHIDRAULICE
Principalii prametrii care se au in vedere atunci cand se alege o servovalva electrohidaulica sunt presiunea nominala,debitul de referinta si frecventa la care defazajul dintre curentul de comanda si debitul comandat este de 90°. O servovalva mai este caracterizata si de alti parametrii si ridica unele cerinte deosebite in circuitul hidraulic din care face parte.
Principalele tipuri de servovalve produse pe plan international sunt servovalvele cu distribuitor ajutaj-clapeta, servovalvele cu tub mobil si servovalvele cu comanda directa.
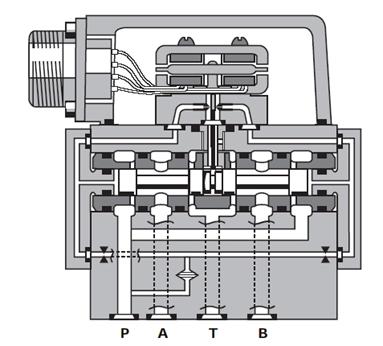
Pentru servovalvele cu distribuitor ajutaj-clapeta principiul de functionare este urmatorul. Un semnal electric de comanda este aplicat unei infasurari unui motor de cuplu si creeaza un moment asupra armaturii mobile a etajului pilot al servovalvei. Aceasta produce o deplasare a armaturii si deci
si a clapetei. Deplasarea clapetei produce strangularea unui ajutaj si debitul este dirijat spre unul din capetele sertarului pe care il deplaseaza din pozitia neutra.
Deplasarea sertarului deschide calea dintre canalizatia de alimentare (P) si una din camerele cilindrului hidraulic si simultan este deschisa si calea de la cealalta camera a rezervorului (T). Deplasarea sertarului produce o forta asupra resortului lamelar. Apare astfel un moment care readuce clapeta in pozitia neutra. Cand clapeta a ajuns in pozitia neutra sertarul se opreste in pozitia in care se afla, astfel incat debitul la cilindrul hidraulic este mentinut constant. În momentul in care apare o variatie a curentului de comanda se produce o noua deplasare a sertarului si deci o variatie a debitului la consumator.
La servovalvele cu tub mobil motorul de cuplu actioneaza un tub mobil care se deplaseaza in fata unei dispozitiv de distributie format din doua orificii. Un curent aplicat infasurarii motorului de cuplu deplaseaza tubul mobil din pozitia neutra. Debitul care iese din tubul mobil este dirijat spre una din extremitatile sertarului, care se deplaseaza din pozitia neutra si regleaza debitul la consumator.
Servovalvele cu comanda directa utilizeaza un motor de forta liniar. Motorul de forta este un motor diferential cu magneti permanenti. Motorul de forta liniar are o pozitie neutra in jurul careia produce o forta si o deplasare in ambele directii. Forta si deplasarea sunt proportionale cu curentul de comanda.
Resorturile de rigiditate ridicata produc o forta de revenire in pozitia neutra iar forta electromagnetica trebuie sa fie egala cu aceasta forta de revenire plus fortele hidraulice care apar in distribuitor. Pe parcursul cursei de revenire, forta resortului se aduna cu forta data de motorul de forta si astfel sertarul este actionat de o forta mai mare, facand servovalva mai putin sensibila la impuritatile lichidului hidraulic. Motorul de forta liniar necesita un curent foarte mic in pozitia neutra care este mentinuta de resorturi.
Servovalvele electrohidraulice pot fi utilizate in diferite tipuri de servosisteme. Cele mai reprezentative sunt servosistemul de pozitie,servosistemul de viteza si servosistemul de forta.
Servosistemul de pozitie
Un servosistem de pozitionare a sarcinii (suprafetei de comanda) este compusa dintr-o servovalva, un actuator (motor hidraulic rotativ sau cilindru hidraulic), un traducator de pozitie, un sistem de comanda a pozitiei(in cazul de fata pozitia mansei si sistemele de automatizare a zborului) si un sistem electronic de reglare. Un sistem de reglare a pozitiei este prezentat in figura 6.
Cele doua iesiri de comanda ale servovalvei sunt cuplate la cilindrul hidraulic. Sistemul electronic compara semnalul de comanda cu semnalul de reactie furnizat de traducator. Daca exista o diferenta intre cele doua, axeasta este amplificata si aplicata servovalvei ca semnal de eroare. Acesta produce deplasarea sertarului servovalvei, porducand astfel un debit la consumator, pana cand semnalul de comanda coincide cu semnalul de reactie.
Servosistemul de viteza
Un servosistem de viteza se compune dintr-o servovalva, un motor hidraulic, un tahometru, sisteme de prescriere a valorii vitezei si un sistem electronic care realizeaza diferenta dintre semnalul de comanda si semnalul de eroare, o amplifica si apoi o integreaza. Daca exista o diferenta intre semnalul de comanda si semnalul de eroare apare la iesirea sistemului electronic un curent care se aplica motorului de cuplu al servovalvei. În acest fel sertarul de comanda al servovalvei este deplasat si modifica debitul trimis motorului hidraulic pana cand viteza sa corespunde cu semnalul de comanda.
Un servosistem tipic cu motor hidraulic rotativ este prezentat in figura urmatoare. În cazul unui sistem cu deplasare liniara se inlocuiesc motorul hidraulic si tahometrul cu un cilindru hidraulic si un traductor liniar de viteza.
Debitul reglat de servovalva este aplicat motorului hidraulic.
Servosistemul de forta
Servosistemul de forta cuprinde o servovalva, un actuator, un traductor de forta sau de presiune si un sistem electronic. Pentru a imbunatatii performantele sistemului se poate utiliza un drosel reglabil intre camerele cilindrului hidraulic. Un serosistem tipic de forta este prezentat in figura urmatoare.
Debitul reglat de servovalva este trimis cilindrilor hidraulici. Sistemul electronic compara semnalul de comanda cu semnalul produs de traductorul de forta sau de presiune. Daca exista o diferenta intre cele doua semnale, acesta este amplificata si trimisa motorului de cuplu al servovalvei. Acesta produce deplasarea sertarului de comanda al servovalvei pana cand forta produsa are valoarea corespunzatoare semnalului de comanda.
Parametrii caracteristici servovalvelor electrohidraulice
Parametri electrici
Curentul de intrare (input current) - este curentul aplicat servovalvei care comanda debitul la consumator. Se da de obicei in mA.
Curentul de referinta (rated current) - este curentul aplicat servovalvei, in oricare din sensuri, obtine debitul de referinta. Se da de obicei in mA. Curentul de referinta este specificat pentru o configuratie particulara a legarii infasurarilor (diferentiala, serie, paralel sau o singura infasurare) si nu include curent de compensare.
Impedanta infasurarilor (coil impedace) - variaza cu frecventa si amplitudinea semnalului de comanda precum si cu alte conditii de functionare (de exemplu temperatura).
Semnal de precomanda (dither) - este un semnal de curent alternativ se suprapune uneori peste semnalul de comanda al servovalvei pentru a imbunatatii rezolutia sistemului. Este exprimat prin frecventa de precomanda in Hz si de curentul de precomanda varf la varf, exprimat in mA. Acest curent produce o vibratie de amplitudine mica a sertarului celui de-al doilea etaj in jurul pozitie prescrise, mentinand astfel o pelicula de lichid hidraulic intre sertar si bucsa sa. Se reduce astfel frecarea intre bucsa si sertar si implicit creste sensibilitatea servovalvei. Se recomanda un curent de precomanda cu amplitudinea varf la varf de maxim 10% din curentul de referinta.
Frecventa acestui curent depinde de tipul servovalvei si se specifica de producator.
Parametrii hidraulici
Debitul comandat (control flow) -este debitul care ajunge la consumator. Se exprima in .m3/s (cis), gallon-min (gal/min), sau litri/min (l/min).
Debitul de referinta (rate flow) - se da de obicei la o cadere de presiune pe servovalva de 1000 psi (70bar), pentru servovalve clasice. Pentru servovalve cu comanda directa caderea de presiune de referinta este de 150 psi (10,5 bar). Debitul de sarcina zero QNL variaza cu presiunea de alimentare ca in figura 8. relatia dintre debitul de referinta QR si debitul la sarcina nula este
 (27)
(27)
QR el=0.12518*10-3 m3/s=7.510 l/min=1.983galons/min
Qr pr=0.25509*10-3m3/s=15.305 l/min=4.043galons/min
Qr dir=0.2266*10-3m3/s=13.396 l/min=3.591galons/min
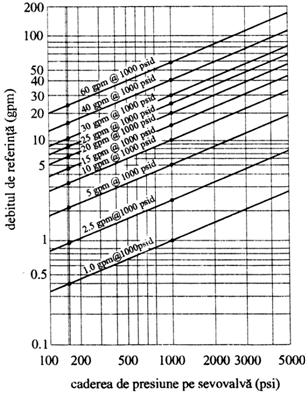
Fig.8
Amplificarea in debit (flow gain) - raportul dinte debitul la consumator si curentul de comanda, exprimat in cis/mA, gpm/mA, lpm/mA.
Debitul la sarcina nula (no load flow) - debitul furnizat de servovalve la stuturile de cuplare a consumatorului hidraulic in conditiile unei caderi de presiune nule pe consumator, exprimat in cis,gpm sau lpm.
Debitul de pierderi interne (internal leakage) - debitul total prin servovalve, de la stutul de alimentare la stutulde retur la rezervor in conditiile unei debit la consumatorul hidraulic nul. Se masoara de obicei cu stuturile la consumator astupate. Se exprima in cis, gpm sau lpm. Acest debit variaza in raport cu curentul de comanda, fiind maxim la curent de comanda nul. Acesta din urma este denumit debit de pierdere la comanda nula (null leakage).
Caderea de presiune pe sarcina ΔpL (load pressure drop) - diferenta de presiune intre stuturile de cuplare a consumatorului exprimata in psi sau bar.
Caderea de presiune pe
servovalva Δpv (valve pressure
drop) - este suma caderilor de presiune pe componentele servovalvei se
calculeaza cu relatia ![]()
![]()
Performante
Liniaritatea (linearity) - deviatia maxima a debitului de la o variatie liniara cu coeficeintul de amplificare in debit, exprimata in procente din curentul de referinta.
Simetrie (simmetry) - exprima masura in care coeficientul de amplificare in debit obtinut cu o polaritate de alimentare este egal cu coeficientul de amplificare in debit obtinut cu polaritatea opusa. Se masoara ca diferenta dintre cei doi coeficienti de amplificare exprimata ca procente din cel mai mare.
Histerezis (hysterezis) - este diferenta dintre curentii de comanda necesari pentru a produce acelasi debit la consumator, cand curentul de comanda variaza lent si critic, inversandu-si polaritatea.
Pragul de sensibilitate (threshold) - este cresterea de curent necesara pentru a produce o variatie a debitului la consumator. Este uzual masurat ca fiind variatia de curent necesara pentru a trece de la un debit crescator la un debit descrescator, exprimat in procente din curentul de referinta.
Abaterea de la nul (lap) - reprezinta diferenta intre extensiile portiunilor liniare ale caracteristicilor, masurata la un debit de sarcina nul. Diferenta apare datorita jocului dintre sertar si bucsa sa, joc necesar pentru a se putea deplasa sertarul (vezi figura 9). Caracteristicile din figura 9 sunt trasate la sarcina nula.
Amplificarea in presiune (pressure gain) - reprezinta variatia caderii de presiune pe consumator in raport cu variatia curentului de comanda, in conditiile unui debir nul la consumator, exprimata in psi/mA sau bar/mA, in domeniul presiunii la consumator de ± 40% din presiunea de alimentare.
Nulul (null) - conditiile in care servovalva produce la consumator in debit nul in conditiile unei caderi de presiune pe consumator nule.
Curentul de nul (null bias) - curentul necesar pentru a aduce servovalva in conditii de nul, excluzand efectul de histerezis, exprimat ca procente din curentul de referinta.
Deviatia nulului (null shift) - variatia curentului de nul datorata schimbarii conditiilor de functionare, exprimata ca procente din curentul de referinta.
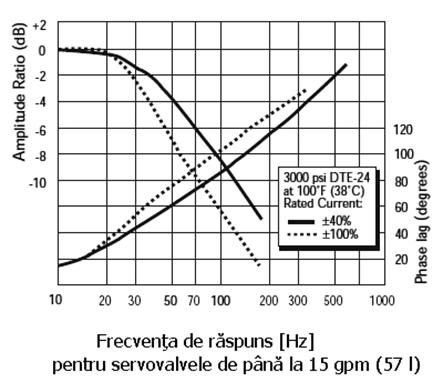
Raspunsul in frecventa (frequency response) - exprima relatia dintre debitul la consumator in conditii de sarcina nula, atunci cand curentul de comanda variaza sinusoidal cu camplitudine constanta intr-un domeniu de frecvente. Se exprima prin raportul amplitudinilor exprimat in dB si unghiul de faza exprimat in grade.
Tabelul 5. Tranformarea unitatilor de masura
|
Marimea |
Sistemul anglo-saxon |
Sistemul metric |
Relatia de transformare |
|
Debit |
in3/s (cis) gallon/min (gpm) |
litrii/min (lpm) |
0,98 lpm/cis 3,85 cis/gpm 3,78 lpm/gpm |
|
Presiune |
lb/in2 (psi) |
bar |
0,069 bar/psi |
|
Lungimi |
inch (in) |
milimetri(mm) microni (μm) |
25,4 mm/in 25400 μm/in |
|
Masa |
pound (lb) |
kg |
0,454 kg/lb |
|
Moment |
in-lb |
N-m |
0,113 N-m/in-lb |
|
Temperatura |
grad Fahrenheit (F) |
grad Celsius (°C) |
°C= 5/9 (F-32) |
Variatiile caracteristicilor hidraulice
Debitul de referinta (vezi figura 8)
Raspunsul in frecventa
Raspunsul in frecventa variaza in functie de amplitudinea semnalului de camanda, cu presiunea de alimentare si cu parametrii interni de proiectare ai servovalvei. Variatia raspunsului in frecventa se refera la shimbarea de defazaj 90° in raport cu presiunea de alimentare. Variatia tipica este data in figura 10. La servovalvele cu comanda directa raspunsul in frecventa nu este influentat de presiunea de alimentare.
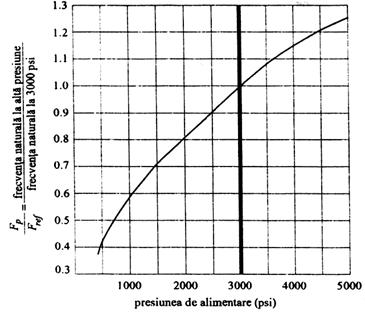
fig.10
Raspunsul la treapta unitate
Raspunsul la treapta unitate variaza cu amplitudinea, presiunea de alimentare si parametrii de proiectare ai servovalvei. A se vedea cataloagele pentru valori exacte. Raspunsul la treapta maxima va prezenta in mod normal o portiune liniara reprezentand saturarea etajului pilot. Panta acestei portiuni va varia din variatia presiunii de alimentare.
Caracteristicile debitului de sarcina
Debitul la consumator va varia cu schimbarea caderii de presiune pe consumator si cu curentul de comanda, ca in figura 11. Aceste caracteristici respecta foarte bine relatia:
![]() (28)
(28)
in care
QL - debitul la consumator;
QNL - debitul la sarcina nula cu cadered e presiune 1000 psi (70 bar) pe servovalva sau 150 psi (10,5 bar) pe servovalva cu comada directa;
i - raportul dintre curentul aplicat si curentul de referinta;
![]()
ps - presiunea de alimentare;
pR - presiunea pe conducta de retur;
pL- caderea de presiune pe sarcina.
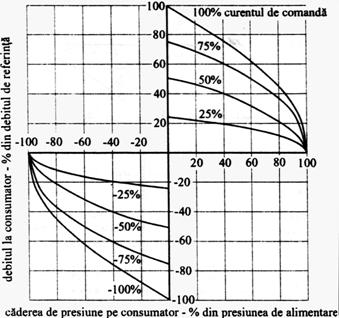
fig.11
Debitul de pierderi interne
Exista doua debite de pierdere debitul prin distribuitorul ajutaj-clapeta sau cu tub mobil (cunoscut ca debit de tarare), care este aproximativ constant si debitul care trece pe langa sertar, care variaza in functie de pozitia sa. Pierderile maxime apar in conditii de nul. Pentru valori numerice a se vedea cataloagele servovalvelor.
Fortele de actionare a sertarului
Forta hidraulica maxima disponibila pentru comanda sertarului celui de-al doilea etaj va depinde de presiunea de alimentare si de aria sectiunii sertarului. În cazul servovalvelor cu comanda directa, forta de deplasare a sertarului este creata de un motor liniar de forta si nu depinde de presiunea de alimentare.
Amplificarea in presiune
În mod normal amplificarea in presiune depaseste 30% din presiunea de alimentare pentru o variatiede 1% din curentul de referinta si poate ajunge la 100%.
Curentul de nul
Curentul de nul poate fi reglat in faza de punere la punct a servovalvei prin mijloace mecanice.
Liniaritatea
Abaterea de la liniaritate a debitului la consumator ca functie de curentul de comanda va fi mai pronuntata in zona de nul. În conditii standard, amplificarea in debit in jurul conditiilor de nul variaza intre 50 - 200% din amplificarea medie in debit.
Toleranta debitului de referinta: ±10%
Simetrie: < 10%
Histerezis: tipic < 3% pentru servovalve conventionale, < 0,3% pntru servovalve proportionale.
Pragul de sensibilitate: tipic < 0,5% pentru servovalve conventionale, < 1% pntru servovalve proportionale.
Deviatia nulului:
- cu temperatura: la 100° F variatie (56° C) < ± 2%;
- cu acceleratia: la 10g < ± 2%;
- cu presiunea: la 1000 psi variatie (70 bar) < ± 2%;
Consideratii practice privind utilizarea servovalvelor electrohidraulice
Sursele de presiune
Se prefera alimentarea cu presiune constanta, cu variatii minime. Se recomanda utilizarea hidroacumulatorilor si pompelor cu cilindree variabila. În cazul pompelor cu cilindree constanta, utilizarea unui hidroacumulator este optionala.
Daca mai mult decat un sistem critic este alimentat de la o pompa, se izoleaza fiecare system cu supapa unisons si se prevede pentru fiecare hidroacumulator.
Rezervoarele se prevad cu sisteme de aerisire dotate cu filter de 3 - 5 μm (Nu se aplica in cazul sistemelor presurizate de aviatie). Capacitatea rezervorului apropiata de capacitatea instalatiei.
Temperatura si presiunea trebuie reglate continuu daca este necesara o comanda precisa timp indelungat.
Nu se recomanda utilizarea sistemelor de reglare a presiunii cu supapa de siguranta reglabila, deoarece prezinta debit de pierdere permanent, deci pierderi mari de energie.
Conducte si racorduri
Nu se utilizeaza conducte lacuit sau lacuri pentru etansare (Contin particule fine, dificil de filtrat). În caz de necesitate pentru etansare utilizati banda de teflon.
Se utilizeaza doar scule corespunzatoare pentru taierea conductelor. Conductele se debavureaza. Se prefera indoirea la rece a conductelor. Dupa indoire la cald sau sudare conductele se detensioneaza. Utilizarea sarnierelor rotative poate produce span in lichidul hidraulic.
Daca este necesara utilizarea de conducte flexibile se vor folosi de preferat conducte de teflon, nylon sau furtune termoplastice in locul furtunelor de cauciuc (neopren) care pot produce particule care impurifica lichidul hidraulic. Conductele flexibile se plaseaza inainte, nu dupa filtre.
Filtrare
Se utilizeaza un filtru de inalta presiune, cu finete de filtrare de 10 - 15 μm, fara by-pass, chiar inainte de servovalve.
Se utilizeaza daca este posibil un filtru de retur cu finetea de 3 μm.
Se utilizeaza un filtru de retur cu finetea de 3 - 5 μm pe conductele care nu intra in bucla de filtrare.
Instalatia hidraulica se dimensioneaza astfel incat lichidul din rezervor sa fie recirculat de minim 5 ori pe ora.
Aceste recomadari au urmatoarele justificari:
Servovalvele pot suporta impuritati cu dimensiunea maxima de 25 μm.
Nu este nici practic si nici economic a se utiliza filtre fine pe conductele de inalta presiune. Mai ieftin este sa se utilizeze filtre de joasa presiune, de cateva ori mai mari si care pot realiza filtrarea continuu si in conditii mai avantajoase.(Curent stationar si viteze mici ale lichidului imbunatatesc filtrarea)
Daca apar variatii mari ale nivelului lichidului in rezervor, (de exemplu in cazul utilizarii cilindrilor cu tija unilaterala), se recomanda utilizarea unui filtru de joasa presiune cu finetea de 3 μm ca sistem de aerisire. Nu este cazul la rezervoarele presurizate.
Se vor utiliza sisteme de filtrare cu avertizoare de colmatare pentru schimbarea la intervale de timp corespunzator ale elementelor de filtrare.
Se utilizeaza sisteme filtrante de joasa presiune si finete ridicata pentru o instalatie hidraulica inainte de punerea in functiune. Totdeauna un lichid hidraulic nou este un lichid cu continut ridicat de impuritati de la transport si ambalare.
Lichidul din rezervor va fi trecut prin filtre de curatire de cel putin 50 de ori inainte de punerea in functiune a instalatiei. Filtrul de curatire se schimba atunci cand este activat indicatorul de colmatare, sau cand sistemul a functionat 6 pana la 8 ore fara a fi nevoie de schimbarea filtrului de curatire.
Amplasarea servovalvei
Servovalva se amplaseaza cat mai aproape de actuator pentru a reduce volumul de lichid pe conductele dintre aceasta si actuator. Compresibilitatea lichidului hidraulic poate inrautati comportarea sistemului.
Nu se justifica utilizarea conductelor flexibile intre servovalva si actuator. Conductele flexibile scad rigiditatea actionarii si pot produce impuritati in lichidul hidraulic.
Dimensionarea servovalvei
Se alege din cataloagele realizate de firma MOOG Inc., New York o servovalva care are debitul de referinta mai mare sau egal cu debitul de referinta calculat pentru actionarea respectiva. Frecventa de defazaj 90° a servovalvei alese trebuie sa fie de cel putin 3 ori mai mare decat frecventa de rezonanta a actionarii.
Supradimensionarea servovalvei poate inrautati rezolutia sistemului.
Tabelul 6. Parametrii principali ai servovalvelor alese
|
Nr. Crt. |
Actionarea |
Tipul servovalvei (codul) |
Qr [l/min] |
pr [bar] |
ir [mA] |
tr [ms] |
[ms] |
|
Eleron stanga |
760 K H19FOGMAVAH |
70 | |||||
|
Eleron dreapta |
760 K H19FOGMAVAH | ||||||
|
Profundor stanga |
760 K H38FOGMAVAH | ||||||
|
Profundor dreapta |
760 K H38FOGMAVAH | ||||||
|
Directie |
760 K H38FOGMAVAH |
-modelul 760
-schema de montare ISO 10372-04-04-0-92
-versiunea constructiva 4cai,2etaje(etajul superior:ajutaj-clapeta etajul inferior sertar cu bucse)
-etaj de conexiune:optional intern sau extern
-debitul de referinta(±10%la presiunea nominala =1000psi high response:1.0 2.5 5.0 10.0[gpm])
-timp de raspuns la 3000 psi
High response 4 4 4 7[milisec]
-pragul de sensibilitate 0.5%
-histerezis 30%
-deviatia nulului la ΔT=1000F<2.0 [%]
-debitul de pierdere in pozitie neutra :0.40+0.61[%]
-debitul de pierdere al distribuitorului ajutaj clapeta 0.26[gpm]
-aria sertarului:High Response :0.53[inch2]
-rezistenta infasurarilor 400[Ω]
-inductanta 2.20[H]
-puterea electrica 0.23[w]
-conexuinea pentru deschiderea valvelor A(+) D(-) BsiC conectate intre ele
-curentul de referinta ±7.5[mA]
Codificarea s-a facut dupa indicatiile din cataloage:
pentru seria 760:
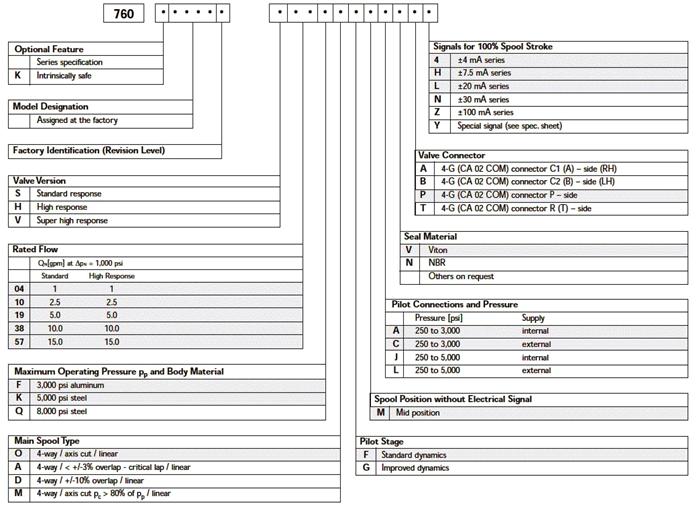
seria 760:

ESTIMAREA FUNCTIEI DE TRANSFER A SERVOVALVEI ELECTROHIDRAULICE
Pentru a estima functia de transfer a servovalvei electrohidraulice vom considera ca aceasta este de
tip aperiodic de ordinul intai. Ca urmare aceasta va fi de forma:
![]() (28)
(28)
In relatia (32) Ksv este factorul de amplificare al servovalvei iar Tsv este constanta de timp.
Raspunsul in timp al unei astfel de functii de transfer este:
![]() (29)
(29)
Impunand
conditia ca la timpul de raspuns al servovalvei sa se obtina o valoare egala cu
0,95 din valoarea prescrisa (cea care se obtine pentru t![]()
![]() ) obtine:
) obtine:
![]() , (30)
, (30)
din care se obtine constanta de timp sub forma
![]() (31)
(31)
|
ELERON |
PROFUNDOR |
DIRECTIE |
|
|
|
Exista tipuri de servovalve la care raspunsul are forma prezentata in figura 12. Acestea prezinta timpul de intaziere t . In cazul acestor servovalve functia de transfer se va scrie sub forma
![]() (32)
(32)
In relatia (36)
constanta de timp ![]() este
este ![]() (33)
(33)
Intarzierea t apare in cazul servovalvelor la care sertarul celui de-al doilea etaj are o acoperire pozitiva mare. Mai exista si servovalvele cu comanda directa, care fie au doar un singur etaj hidraulic compus dintr-un distribuitor cu sertar, fie au doua etaje hidraulice, dar primul etaj este tot de tip distribuitor cu sertar. La acestea, daca distribuitoarele au acoperiri pozitive, prezenta unui timp de intarziere este mult mai evidenta.
Factorul de amplificare se determina din raportul dintre debitul furnizat la curentul maxim de comanda si acest curent maxim de comanda. Trebuie tinut cont insa ca debitul obtinut la curentul maxim de comanda (curentul de referinta) nu este debitul de referinta al servovalvei deoarece caderea de presiune efectiva pe servovalva este diferita de presiunea de referinta a servovalvei de 1000psi (sau pentru unele tipuri de 1500psi). Pentru a determina acest debit maxim se tine cont ca am considerat o pierdere de presiune pe conductele sistemului hidraulic de 20% din presiuneanominala.
Ca urmare debitul la consumator va fi dat de relatia:
 (34)
(34)
|
ELERON |
PROFUNDOR |
DIRECTIE |
|
|
|
In care ![]() este debitul de
referinta al servovalvei, citit din catalog,
este debitul de
referinta al servovalvei, citit din catalog, ![]() presiunea de referinta
a servovalvei, de asemenea data in catalog, iar
presiunea de referinta
a servovalvei, de asemenea data in catalog, iar ![]() este
este
![]() (35)
(35)
![]()
![]()
![]()
![]()
|
ELERON |
PROFUNDOR |
DIRECTIE |
|
|
Ps [bar] | |||
|
PL [bar] | |||
|
PR [bar] | |||
|
pv [bar] |
in
care ![]() =0,8pn iar
caderea de presiune pe consumator este data de relatia (18).
=0,8pn iar
caderea de presiune pe consumator este data de relatia (18).
Deci factorul de amplificare va fi dat de relatia
![]() (36)
(36)
![]()
![]()
![]()
Pentru fiecare actionare proiectata, dupa alegerea servovalvei se estimeaza functia de transfer a acesteia. Se calculeaza constanta de timp cu relatia (35) si factorul de amplificare cu relatia (40). Daca este cazul se determina timpul de intarziere asa cum este prezentat in figura 12 si constanta de timp corespunzatoare cu relatia (37). Rezultatele se trec in tabelul 7.
Tabelul 7. Caracteristicile functiilor de transfer ale servovalvelor alese
|
Nr. Crt. |
Actionarea |
[l/min/mA] |
[ms] |
t [ms] |
|
Eleron stanga | ||||
|
Eleron dreapta | ||||
|
Profundor stanga | ||||
|
Profundor dreapta | ||||
|
Directie |
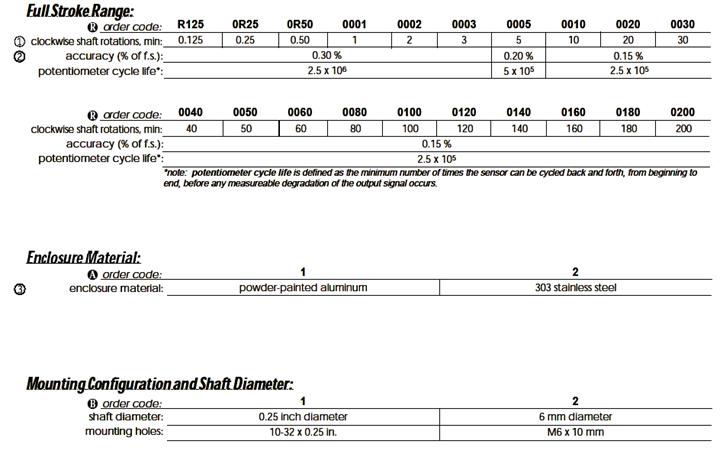
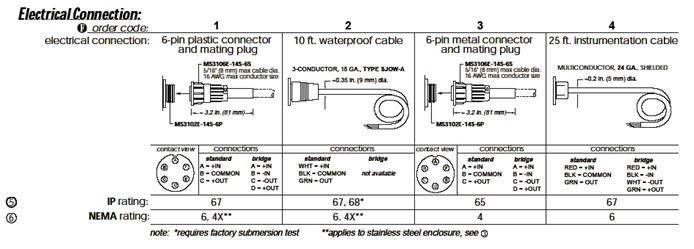
7.ALEGEREA TRADUCTOARELOR UNGHIULARE DE POZITIE
Pentru a transmite comanda de la mansa la ctuatorul hidraulic este nevoie de traductoare care sa
transforme pozitia mansei intr-un semnal electric. De asemenea, circuitul de reactie al servoactuatorului are nevoie de traductoare care sa converteasca de asemenea pozitia suprafetei de comanda intr-un semnal electric. Deoarece atat mansa cat si suprafata de comanda au unghiuri de bracaj de acelasi ordin de marime, ( 30o) se pot alege traductoare de acelasi tip pentru cele doua. Eventuala modificare a raportului de transmisie se poate realiza din reglajul sistemului electronic al actuatorului (potentiometrul "reglare sensibilitate" din figura 7, de la pagina 11).
Pentru instalatia proiectata se aleg traductoare potentiometrice, atat pentru pozitia mansei cat si pentru pozitia suprafetei de comanda. Principalii parametri care caracterizeaza traductoarele unghiulare sunt:
cursa maxima;
semnalul de iesire;
acuratetea;
repetabilitatea;
rezolutia;
tipul senzorului;
incarcarea arborelui de intrare;
momentul de frecare;
rezistenta la intrare;
momentul de frecare;
rezistenta de intrare;
puterea absorbita;
tensiunea maxima de alimentare;
variatia semnalului de iesire in domeniul de masura;
domeniul de temperatura in care poate fi utilizat;
fiabilitatea (numarul maxim de cicluri de functionare);
Deoarece smnalul preluat de la traductoare este transmis pe distante relativ mari la bordul avionului,
este de preferat ca acesta sa fie o tensiune, care se amplifica mai usor si poate fi prelucrata mai comod de echipamentele aferente sistemului comenzilor de zbor.
Alegerea traductorului de pozitie pentru mansa si suprafetele de comanda se va afce pe urmatoarele
criterii principale:
cursa maxima- trebuie sa fie mai mare cu aproximativ 20-30% decat cursa elementului deservit;
tensiunea de alimentare- de obicei traductoarele de pozitie potentiometrice de la bordul avionului sunt alimentate de la tensiunea de 28 V c.c;
acuratetea- traductorul trebuie sa poata sesiza deplasari cat mai mici ale elementului deservit;
repetabilitatea- variatia tensiunii de iesire la pozitionari identice repetate ale arborelui de intrare trebuie sa fie cat mai mica;
domeniul temperaturilor de lucru- in aviatie se recomanda un domeniu de temperatura pentru traductoare de cel putin - 56oC ÷ 70oC. Acest domeniu poate sa varieze in functie de pozitionarea concreta a traductorului pe avion;
gabart si masa cat mai reduse.
Dupa alegerea traductorului se determina factorul sau de amplificare cu relatia:
![]() (37)
(37)
|
ELERON |
PROFUNDOR |
DIRECTIE |
|
|
Ktraductor [v/o] |
In care ![]() este variatia de
tensiune de iesire pe intreg domeniul de masurare iar
este variatia de
tensiune de iesire pe intreg domeniul de masurare iar![]() este cursa maxima a traductorului.
este cursa maxima a traductorului.
![]() V
V
![]() θ=50+50*20%=60grade
θ=50+50*20%=60grade
Deoarece domeniul de bracaje este foarte apropiat pentru toate suprafetele de comanda se poate alege un singur tip de traductor pentru toate sistemele de actionare proiectate.
S-au ales traductoarele realizate de firma CELESCO Inc., Ontario;
- codificarea acestora este:

conform explicatiilor din catalog:

8.STABILIREA SCHEMEI BLOC SI A FUNCTIEI DE TRANSFER A SISTEMELOR DE ACTIONARE PROIECTATE
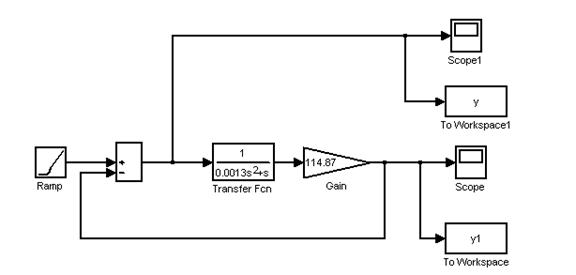
Sistemul complet de comanda este de tipul celui din figura 7 de la pagina 11, fiind sistem
de pozitionare hidraulica. Ca urmare schema bloc a sistemului va fi cea din figura 13. In figura 13.a. este prezentata schema cu blocuri functionale iar in figura 13.b. este prezentata schema bloc cu functii de transfer.
Pe baza componentelor sistemului, alese pana in aceasta etapa, sunt cunoscute toate
functiile de transfer din fig. 13.b. exceptand functiile de transfer ale regulatorului proportional si cea a convertorului tensiune-curent. Convertorul tensiune-curent trebuie sa aiba o caracteristica liniara si el, astfel incat regulatorul proportional si convertorul tensiune-curent sa poata fi grupate intr-un singur bloc cu un factor de amplificare echivalent.
Pentru a obtine caracteristicile impuse actionarii in etapele urmatoare ale proiectului va fi determinat factorul de amplificare echivalent al celor doua (regulator-proportional + convertor tensiune-curent).
Mai trebuie remarcat faptul ca la cursa de extensie a tijei cilindrului se va obtine o functie de transfer iar la cursa de comprimare a tijei o alta functie de transfer. Acestea vor diferi prin aria efectiva a pistonului cilindrului.
In etapele urmatoare va fi calculat regulatorul pentru cazul cursei de extensie a tijei cilindrului, urmand ca functia de transfer pentru cazul comprimarii cilindrului sa rezulte din cea anterioara. Se procedeaza astfel deoarece viteza de deplasare a tijei cilindrului hidraulic este mai mica la cursa de extensie. Se urmareste astfel respectarea criteriului de viteza de actionare impusa la cursa de extensie a tijei, urmand a se studia comportarea sistemului si la cursa de comprimare a tijei.
In figura 13 nu s-a figurat legatura sistemului de actionare a suprafetelor de comanda cu blocurile calculatoarelor de bord. Calculul acestei legaturi depaseste cadrul acestui proiect insa este foarte importanta pentru sistemele de stabilizare ale aeronavei, precum si pentru pilotul automat.
Schema bloc din figura 13 este echivalenta cu cea din figura 14. Am luat in consideratie faptul ca este utilizat acelasi tip de traductor de unghi atat pentru mansa cat si pentru suprafata de comanda.
Figura 14.
Constanta K din figura 14 este data de relatia
 (38)
(38)
Se
va determina K pe baza cerintelor impuse in tema de proiect si
apoi utilizand relatia (42) se va determina produsul ![]() .
.
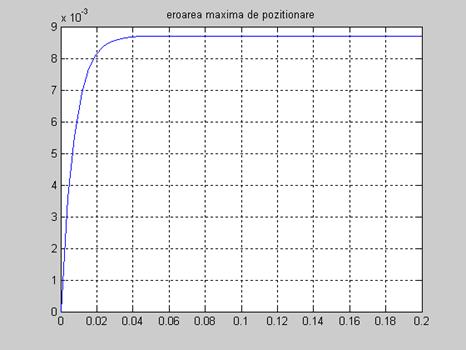
Cerintele impuse in tema de proiect sunt ca sistemul de actionare sa permita obtinerea vitezei maxime de bracaj de 70 º/s si a unei erori maxime de pozitionare de 1 º. Viteza maxima de bracaj am urmarit sa o obtinem din dimensionarea servovalvei, urmarim sa obtinem acum din functia de transfer constanta K care sa ne asigure respectarea erorii maxime de pozitionare. Eroarea maxima de pozitionare poate fi exprimata in forma complexa sub forma
 . (39)
. (39)
Eroarea
maxima de pozitionare se obtine in cazul in care se
aplica la intrare un semnal rampa cu viteza maxima impusa.
În acest caz transformata Laplace a lui ![]() (s) este
(s) este
![]() (40)
(40)
Variatia
in timp a erorii de pozitionare se calculeaza introducand
expresia (44) a lui ![]() (s) in relatia (43) si apoi aplicand
transformata Laplace inversa. Considerand ca Δε are
polii s1 si s2 , Δε(s) capata
forma
(s) in relatia (43) si apoi aplicand
transformata Laplace inversa. Considerand ca Δε are
polii s1 si s2 , Δε(s) capata
forma
 (41)
(41)
Daca polii s1 si s2 sunt reali, atunci transformata Laplace inversa a lui Δε(s) este
![]() (42)
(42)
Functia ε(t) este crescatoare pentru t>0 si pentru t → ∞ tinde la valoarea
 (43)
(43)
Îm
relatia (47) am tinut cont de relatia (43) pentru a
inlocui pe ![]() si pe
si pe ![]() .
.
Din (47) rezulta K
![]() (44)
(44)
Si rezulta ![]() , care corespunde erorii maxime impuse.
, care corespunde erorii maxime impuse.
Studiind relatia (43) si impunand conditia ca polii sa fie reali obtinem relatia
![]() (45)
(45)
fiind indeplinita conditia
![]() , (46)
, (46)
Este
preferabil de adoptat o valoare pentru K apropiata de ![]() deoarece la cursa
inversa aria efectiva este aproximativ jumatate din aria
efectiva la cursa de extensie a tijei cilindrului hidraulic, deci se va
obtine o valoare pentru K aproximativ dubla. Odata cu
cresterea lui K se obtine scaderea erorii maxime de
pozitionare, dar la depasirea valorii date de (49) polii devin
complex conjugati iar comportarea sistemului de actionare devine
ascilatorie amortizata. Este de preferat sa se evite obtinerea
unui sistem oscilatoriu, deoarece intr-un astfel de caz se introduc vibratii
suplimentare in structura avionului.
deoarece la cursa
inversa aria efectiva este aproximativ jumatate din aria
efectiva la cursa de extensie a tijei cilindrului hidraulic, deci se va
obtine o valoare pentru K aproximativ dubla. Odata cu
cresterea lui K se obtine scaderea erorii maxime de
pozitionare, dar la depasirea valorii date de (49) polii devin
complex conjugati iar comportarea sistemului de actionare devine
ascilatorie amortizata. Este de preferat sa se evite obtinerea
unui sistem oscilatoriu, deoarece intr-un astfel de caz se introduc vibratii
suplimentare in structura avionului.
Daca nu este indeplinita relatia (50) polii sunt complex conjugati de forma
![]()
![]()
iar eroarea de pozitionare va avea expresia
 (49)
(49)
Pentru
a afla maximul lui ![]() se calculeaza
derivata si se egaleaza cu zero.
se calculeaza
derivata si se egaleaza cu zero.
![]() (50)
(50)
Se gaseste astfel timpul pentru primul maxim, care este si cel mai mare
![]() (51)
(51)
În relatia (55) s-a tinut cont de faptul ca t>
Cu valoarea data de (55) se calculeaza primul maxim prin inlocuirea in (53) si se compara cu eroarea maxima impusa. Daca eroarea obtinuta este mai mica decat eroarea maxima impusa atunci se adopta valoarea respectiva pentru K. Daca eroarea este mai mare decat eroarea impusa se creste K cu aproximativ 15% si se reia calculul, pana cand rezultatele se incadreaza in valorile impuse. Trebuie mentionat ca prin cresterea lui K creste suprareglajul in cazul raspunsului la semnal treapta, deci se inrautateste regimul dinamic al actionarii.
Deci in concluzie, pentru cazul in care este indeplinita relatia (50) se procedeaza in felul urmator:
se calculeaza K cu relatia (48)
se calculeaza polii sistemului din relatia (43), se va obtine
 (52)
(52)
deci
![]() (53)
(53)
 (54)
(54)
se calculeaza timpul primului maxim cu relatia (55)
se calculeaza maximul erorii cu relatia (53)
daca eroarea maxima este mai mica decat eroarea impusa atunci se adopta valoarea lui K rezultata din (48)
daca eroarea maxima este mai mare decat eroarea impusa atunci se creste K cu 15% si se reia calculul.
Valoarea lui b va fi chiar pulsatia proprie a sistemului automat de actionare. Se va compara aceasta valoare cu pulsatia de defazaj 90º a servovalvei si cu pulsatia de rezonanta a ansamblului cilindru hidraulic - suprafata de comanda Daca aceste pulsatii sunt apropiate va fi necesara uitlizarea unor amortizoare de vibratii ale suprafetelor de comanda.
Dupa calculul constantei Kales se
determina ![]() din relatia (42), deci
din relatia (42), deci
![]()
-pentru eleron 
-pentru profundor ![]()
-pentru directie ![]()
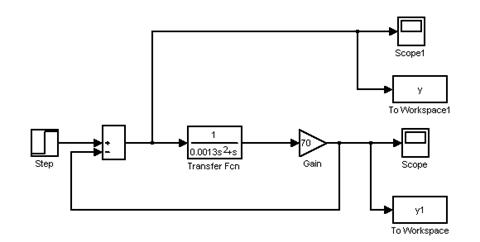
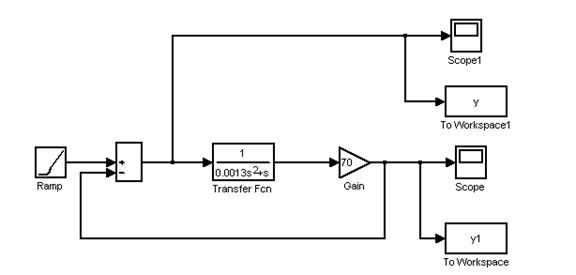
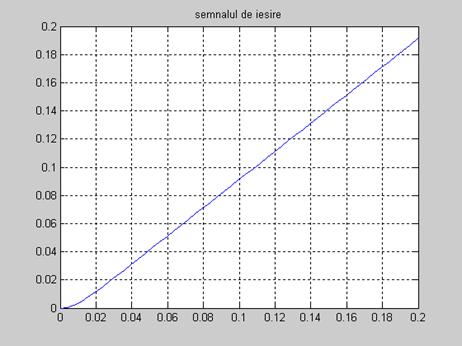
Cu valorile determinate se implementeaza schema din figura 14 in SIMULINK si se realizeaza simularea raspunsului la semnal rampa cu viteza de 70 º/s si un semnal treapta cu amplitudinea de 5º. Se specifica in proiect constatarile privind rezultatele obtinute. Se specifica in tabelul 8 timpii de raspuns obtinuti in urma simularilor pentru fiecare actionare in parte.
Dupa efectuarea simularilor se trece la simularea fuctionarii sistemului la cursa de comprimare a tijei verinului. Se va modifica valoarea constantei Kales conform relatiei
 (56)
(56)
![]()
Se
fac simularile sistemului de actionare inlocuind in
schema din figura 14 pe Kales cu ![]() . Semnalele test vor fi aceleasi ca si cele din
cazul precedent. Se specifica si in acest caz constatarile
privind rezultatele obtinute.
. Semnalele test vor fi aceleasi ca si cele din
cazul precedent. Se specifica si in acest caz constatarile
privind rezultatele obtinute.
Tabelul 8. Parametrii sistemului de actionare proiectate
|
Nr. Crt. |
Actionarea |
Kales |
[mA/V] |
|
t raspuns1 [ms] |
traspuns2 [ms] |
Observatii |
|
Eleron stanga | |||||||
|
Eleron dreapta | |||||||
|
Profundor stanga | |||||||
|
Profundor dreapta | |||||||
|
Directie |
traspuns1 reprezinta timpul de raspuns la cursa de extensie a tijei cilindrului hidraulic iar traspuns2 reprezinta timpul de raspuns la cursa de comprimare a tijei cilindrului hidraulic. În rubrica de observatii se specifica daca raspunsul obtinut este de tip aperiodic sau oscilatoriu iar in cazul unui raspuns oscilatoriu se specifica si suprareglajul si pulsatia proprie a sistemului automat proiectat.
cursa de comprimare- pentru actionarea profundorului si a directiei: Se pot face unele precizari privind proiectarea sistemelor de actionare a suprafetelor de comanda.
Intrare treapta pentru eleron profundor si directie: si k=70
Intrare rampa pentru eleron profundor si directie
Si k =70
intrare treapta tentru eleron profundor si directie si k'=114.87
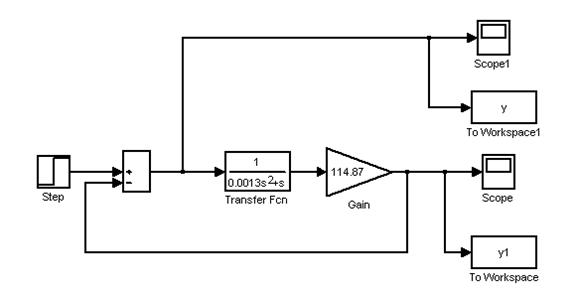
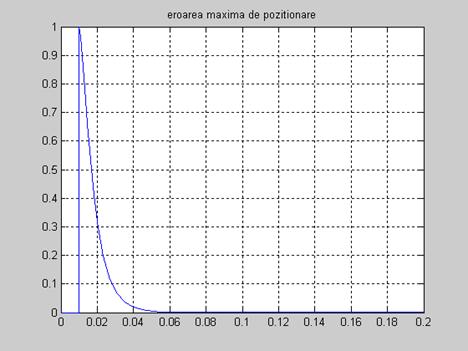
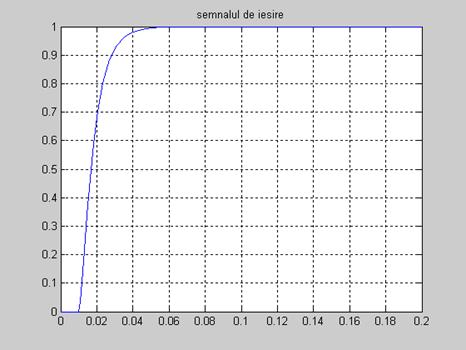
intrare treapta pentru eleron profundor si directie
k'=114.87
Împartirea suprafetelor de comanda in doua sau mai multe sectiuni de arie mai mica are efecte benefice si asupra actionarii, nu numai asupra fiabilitatii sistemului comenzilor de zbor. Sectiuni de suprafata mai mica inseamna forte mai mici. Aceasta inseamna cilindri hidraulici mai mici, si prin urmare, debite necesare mai mici. În consecinta se pot utiliza servovalve de dimensiuni mici cu constante de timp Tsv considerabil mai mici si relatia (50) poate fi indeplinita mai usor in cazul unor astfel de actionari. Se poate obtine astfel un sistem de actionare cu comportare aperiodica, preferabil in locul celor cu comportare oscilatorie, atat datorita timpului de raspuns mai scazut cat si datorita reducerii nivelului de vibratii in structura aeronavei.
9.DIMENSIONAREA SURSELOR HIDRAULICE
Avand in vedere ca actionarile comenzilor de zbor sunt de maxima imprtanta pentru aeronava, sursele hidraulice trebuie sa asigure functionarea acestora in orice conditii de zbor (normale sau de avarie). Din acest motiv, sistemul hidraulic este divizat in mai multe subsisteme, care in mod normal alimenteaza fiecare un anumit grup de consumatori, dar care in caz de avarie pot fi interconectate intre ele, astfel incat in caz de avarie actionarile comenzilor de zbor sa ramana active. In caz de avarie se renunta la actionarile de importanta mai mica, urmarindu-se mentinerea in functiune a urmatoarelor subsisteme: sistemele de actionare a comenzilor de zbor, sistemul de scoatere in conditii de avarie a trenului de aterizare si sistemul de franare a rotilor trenului de aterizare in conditii de avarie.
In mod uzual, la bordul avioanelor bimotoare mari de transport sistemul hidraulic este impartit in trei subsisteme, fiecare cu sursele proprii de alimentare si cu posibilitati de interconectare in conditii de avarie.
Sistemul hidraulic principal- este deservit de duoa pompe cu actionare mecanica dispuse fiecare pe cate un motor al avionului si o pompa cu actionare electrica;
Primul sistem de rezerva- are alimentarea realizata de o pmpa actionata mecanic, dispusa pe unul din motoare si o pompa cu actionare electrica;
Al doilea sistem de rezerva- are alimentarea realizata de o pompa actionata mecanic, dispusa pe celalalt motor si o pompa cu actionare electrica.
Comutarea alimentarii intre cele trei surse hidraulice se face automat in functie de starea de functionare a acestora.
La avioanele cu patru motoare exista pe langa pompele de avarie actionate electric , cate o pompa hidraulica pe fiecare din motoare.
Toate suprafetele de comanda primesc in mod normal alimentare de la sistemul hidraulic principal. Pentru cazuri de avarie, alimentarea sistemelor de actionare a fiecarei suprafete de comanda se face de la unul din sistemele de rezerva. Spre exemplu, actionarile eleroanelor, profundoarelor si directiei pot fi grupate dupa cum urmeaza:
alimentarea de la sistemul hidraulic principal pentru toate sistemele de actionare;
alimentare de la primul sistem hidraulic de rezerva pentru eleroanele interioare, profundorul stang si directie;
alimentare de la al doilea sistem hidraulic de rezerva pentru eleroanele exterioare, profundorul drept si directie.
Comutarea alimentarii se face automat la scaderea presiunii in sistemul principal sau in sistemele de rezerva. Scaderea presiunii in fiecare sistem este sesizata de cate un releu de presiune, care dupa caz pune
in functiune pompa electrica din sistemul principal sau comuta alimentarea pe unul din sistemele de rezerva. In plus, mai exista la bordul avionului si posibilitatea comutarii alimentarii prin intermediul unei supape mecanice de comutatie, comutarea putandu-se realiza fara alimentare cu tensiune electrica.
De obicei exista un singur rezervor hidraulic care deserveste intreaga instalatie hidraulica.
Exista insa si varianta cu doua rezervoare hidraulice, unul principal dispus mai sus si unul de avarie, aflat in legatura cu cel principal, dispus mai jos decat acesta, astfel incat in cazul spargerii rezervorului principal, sistemele de actionare a comenzilor de zbor sa poata fi alimentate din rezervorul de avarie. In cazul spargerii rezervorului principal, absorbtia se poate face fara nici o modificare din rezervorul de avarie, iar returul este comutat si el in rezervorul de avarie.
Rezervoarele hidraulice, pentru avioanele de transport cu plafon in jurul a 11000 m sau mai sus, sunt presurizate, utilizandu-se aer comprimat preluat de la compresoarele motoarelor. Pentru avioanele cu sisteme de propulsie turbopropulsoare, care au plafonul de zbor in jurul a 7000 m, rezervoarele hidraulice nu sunt presurizate, dar pompele hidraulice principale sunt prevazute cu pompe auxiliare centrifuge care inlesnesc absorbtia lichidului hidraulic din rezervor. Daca pompele sunt cu actionare mecanicam plasate pe motoare, atunci se utilizeaza tot rezervoare presurizate datorita lungimii mari a circuitului de absorbtie.
Socurile hidraulice din instalatie sunt preluate de hidroacumulatoare hidraulice, care preiau si varfurile de sarcina ale instalatiei hidraulice. Ca urmare, sursele hidraulice se dimensioneaza la un debit de 80% din debitul maxim, urmand ca varfurile de sarcina care depasesc aceasta valoare sa fie preluate de hidroacumulatoarele hidraulice.
Lichidul hidraulic este filtrat atat la iesirea din pompe cat si la intoarcerea in rezervor. Filtrele sunt prevazute cu sisteme de semnalizare a colmatarii , dar fara by-pass. Colmatarea filtrelor este semnalizata la bord prin aprinderea unor lampi de semnalizare si mecanic, prin iesirea unui stegulet de semnalizare a colmatarii din corpul filtrului. Semnalizarea mecanica este destinata personalului tehnic de intretinere.
Pentru sistemele care sunt prevazute cu servovalve electrohidraulice sunt prevazute filtre suplimentare, cu finetea de 5mm inainte de intrarea in servovalva. Si aceste filtre sunt prevazute cu sisteme de semnalizare a colmatarii si fara by-pass.
Schema unei surse hidraulice pentru un avion de transport bimotor poate fi cea prezentata in figura 15.
1- filtru de aer comprimat; 2- regulator de presiune aer comprimat; 3- supapa de comutatie;
4- rezervor hidraulic principal; 5- supapa de siguranta rezervor principal; 6- traductor nivel lichid hidraulic; 7- filtre hidraulice retur; 7'- traductor temperatura lichid hidraulic; 8- robinete de comutare retur; 9- rezervor hidraulic de avarie; 10- pompe hidraulice cu actionare mecanica(de la motoare);
11- pompe hidraulice (cu cilindree fixa) cu actionare electrica; 12- supape unisens; 12- filtre de presiune; 14- traductoare presiune hidraulica; 15- regulator de presiune hidraulica; 16- supape de comutare a alimentarii intre circuitele hidraulice.
9.1 DIMENSIONAREA POMPELOR HIDRAULICE
Dimensionarea pompelor hidraulice se face astfel incat debitul total furnizat in circuitul principal
sa fie 80% din debitul maxim cerut de instalatia hidraulica. Varfurile de sarcina peste aceasta valoare se considera a fi preluate de hidroacumulatoarele hidraulice. Varfurile de sarcina care apar in functionarea instalatiei hidraulice sunt de obicei de scurta durata si se datoreaza de obicei suprapunerii actionarii suprafetelor de comanda cu actionarea trenului de aterizare in faza de apropiere la aterizare. Cele doua instalatii au consum mare de lichid hidraulic, dar scoaterea trenului de aterizare dureaza maxim 10-15 s, timp in care acest varf de sarcina poate fi preluat de hidroacumulatoare.
Debitele cerute de instalatiile hidraulice ale avioanelor de transport sunt mari, ca urmare la bordul acestor avioane se utilizeaza pompe cu pistonase axiale, care asigura debitul necesar si au randamentul si fiabilitatea necesare utilizarii in aviatie.
Turatia la care se utilizeaza pompele hidraulice la bordul avioanelor este mult ridicata fata de cazul pompelor utilizate in instalatiile hidraulice terestre. In mod uzual , in instalatiile terestre turatia maxima a pompelor este de 2000-3000 rot/min. Pompele moderne utilizate la bordul avioanelor sunt utilizate la turatii de 9000-10000 rot/min. Se are in vedere in aviatie faptul ca agregatele instalatiilor de bord sunt inlocuite periodic, chiar inaintea atingerii duratei limita de viata a acestora.
Pentru dimensioanrea pompelor hidraulice se considera debitul maximpe care il absoarbe instalatia si se determina debitul pe care trebuie sa-l furnizeze fiecare pompa cu relatia:
![]() (57)
(57)
considerandu-se identice pompele hidraulice.
![]()
![]()
![]()
In functie de cataloagele de pompe se considera o turatie medie de functionare de 70% din turatia maxima data in catalog. Diferenta pana la 100% ia in consideratie variatiile de turatie ale motorului, care se traduc in variatii de turatie ale pompelor actionate de motoare. Se considera deci:
![]() (62)
(62)
Se determina cilindreea pompei cu relatia:
![]() . (58)
. (58)
Se cauta in cataloagele de pompe o pompa care are cilindreea mai mare sau egala cu cea data de relatia (63) si care poate sa furnizeze o presiune mai mare sau egala cu presiunea nominala a instalatiei proiectate. Pentru pompele actionate de motoare se prefera servopompele cu debit variabil, iar pentru pompele actionate electric se prefera pompele cu cilindree fixa. Atat pentru pompele actionate electric cat si pentru pompele actionate de motoare se aleg pompe cu pistonase axiale.
Se extrag din catalog urmatoarele caracteristici tehnice pentru fiecare pompa aleasa:
cilindreea (cilindreea maxima) pentru pompele cu debit variabil=5.5
turatia maxima in circuit deschis=4000rpm
turatia medie de functionare =2100rpm
turatia nominala a pompei=1500rpm
debitul la turatie maxima=22 l/min
debitul la turatia medie de functionare=11 l/min
presiunea absoluta la aspiratie
presiunea nominala a pompei=250bar
presiunea maxima a pompei=300bar
presiunea in carcasa=280bar
temperatura minima de functionare= -15o
temperatura maxima de functionare=60o
domeniul de variatie a vascozitatii lichidului hidraulic=20-100mm/s
masa pompei=2.85Kg
codul de identificare al pompei=PRD-5-22N-1N71-D
Din diagramele date in catalog se determina durata de functionare a pompei alese. Se citeste din diagrama durata de functionare Lh0 a pompei la presiunea nominala a instalatiei hidraulice (presiune aleasa la inceputul proiectului) si turatia nominala a pompei. Se determina apoi durata de functionare la turatia medie data de relatia (62) utilizand relatia:
![]() (59)
(59)
Pompele
actionate electric vor fi considerate ca lucrand la o turatie de ![]() si se va determina
durata de functionare in aceste conditii.
si se va determina
durata de functionare in aceste conditii.
Se citeste din diagramele prezentate in cataloage debitul de pierderi al pompei la presiunea nominala a instalatiei hidraulice proiectate.
Dimensionarea pompelor hidraulice cu debit variabil:
![]()
![]() ;
;![]()
![]()
![]()
![]()
![]()
Codul de indentificare al pompei:
PRD 2-5-22N-1N71-D.
Nu exista grafic de durabilitate
9.2 ALEGEREA FILTRELOR
Filtrele cu care va fi dotata instalatia vor fi alese pe criteriul debitului vehiculat si al presiunii de lucru.se vor alege din cataloage filtre de presiune cu element filtrant sita metalica cu finete de filtrare 25µm si presiunea de lucru mai mare sau egala cu presiunea nominala a instalatiei proiectate.debitul nominal al filtrului trebuie sa fie mai mare sau egal cu debitul maxim absorbit de instalatia hidraulica.pe aceasi criterii se aleg si filtrele de retur,deosebirea este ca la acestea nu se mai impune ca presiunea d functionare sa fie mai mare decat presiunea nominala a instalatiei proiectate .
Se extra din catalog pentru fiecare din filtrele alese urmatoarele date:
TUR -presiumea nominala=320bar
-finetea de filtare=15 µm
-debitul nominal=160 l/min
-caderea de presiune pe filtru la debitul nominal=
-codul de identificare al filtrului=6.780.316.200
RETUR -presiumea nominala=160bar
-finetea de filtare=15 µm
-debitul nominal=160 l/min
-caderea de presiune pe filtru la debitul nominal=
-codul de identificare al filtrului=6.780.345.500
9.3 alegerea supapelor unisens
Se vor alege din cataloage supape unisens care sa aiba caderea de presiune de maxim 5 bar la
debitul maxim care trece prin supapa respectiva. Se are in vedere faptul ca debitul ce trece prin fiecare supapa este debitul furnizat de pompa dupa care este montata, nu debitul maxim absorbit de instalatia hidraulica. Se va prezenta in proiect caracteristica pierdere de presiune - debit a supapei si codul sau de identificare.
9.4 Alegerea lichdului hidraulic
Lichidele hidraulice utilizate in instalatiile aeronavelor trebuie sa satisfaca o serie de cerinte care sa asigure fibilitatea actionarii suprafetelor de comanda.Cateva din cerintele impuse sunt urmatoarele:
Compatibilitatea lichdului cu materiale utilizate in constructia instalatiei hidraulice - in general lichdele hidraulice preactioneaza cu unele dintre metalele sau aliaje precum si cu unele materiale sintetice utilizate pentru etansarile instalatiilor hidraulice.Trebuie cunoscute acele materiale cu care lichdul respectiv reactioneaza pentru a nu fi utilizate la respectiva instalatie;
Modul de elasticitate cat mai ridicat - aceasta proprietate asigura rigiditatea necesara a actionarii,precum si precizia de pozitionare in cazul instalatiilor de actionare a suprafetelor de comanda;
Spumare redusa - aceasta proprietate este legata de cea de mai sus.La presiuni mari lichdulhidraulic dizolva aerul.La intoarcerea ulterioara in rezervor lichidul hidraulic formeaza spuma.Aceasta paote fii absorbita apoi in circuitul hidraulic,ceea ce duce la scaderea modului de elasticitate al lichidului,precum si la functionarea anormala a pompelor.
Proprietati de ungere ridicata - ungerea componentelor in miscare ale instalatiei hidraulice se face prin intermediul lichidului hidraulic.De obicei mentinerea unor proprietati de ungere bune presupune si un anumit domeniu de vascozitate a lichdului;
Vascozitatea in domeniu optim de functionare al echipamentelor instalatiei - in mod normal este de preferat o vascozitate cat mai mica pentru a realiza pierderi de presiune cat mai reduse,dar unele echipamente solicita un domeniu bine precizat de vascozitate a lichidului hidraulic.;
Temperatura de congelare cat mai redusa - temperatura in rezervorul hidraulic poate sa scada foarte mult la altitudini mari de zbor.In aceste conditii lichidul hidraulic trebuien sa fie utilizabil;
Temperatura maxima de utilizare cat mai mare - pompele hidraulice sunt de obicei pozitionate pe motoare acolo unde temperatura poate fii ridicata.La avioanele cu ajutaj reactiv temeratura al care poate ajunge lichidul hidraulic este mult mai mare datorita caldurii degajate de ajutajul reactiv;
Inflamabilitate cat mai redusa - e necesara datorita temperaturilor mari la care poate ajunge lichidul hidraulic;
Sa nu degaje vapori toxici - in general lichidele hidraulice sunt toxice putand sa provoace iritatii ale pielii.La utilizarea anumitor lichide hidraulice se recomanda manusi de cauciuc.Degajarea unor vapori toxici e periculoasa in cazuri de avarie mai ales la bordul aeronavelor de pasageri;
Stabilitate cat mai buna a proprietatiilor in timp - durata de exploatare a lichidului hidraulic trebuie specificata de producator.
Pentru proiectul realizat se alege un lichid hidraulic care sa satisfaca cerintele ce apar la bordul avionului studiat.In tabelul urmator este prezentat lichidul hidraulic folosit inb comparatie cu apa pentru avionul Boeing 767-300.
|
Fluid |
Temperatura
|
Vascozitatea [cSt] |
Densitatea
|
Modul de elasticitate
|
Utilizare |
|
Apa | |||||
|
Skydrol-500 |
Lichidul hidraulic de aviatie neinflamabil |
Copyright © 2026 - Toate drepturile rezervate