|







 |  |
|
| |
 | Biologie | Chimie | Didactica | Fizica | Geografie | Informatica |
| Istorie | Literatura | Matematica | Psihologie |
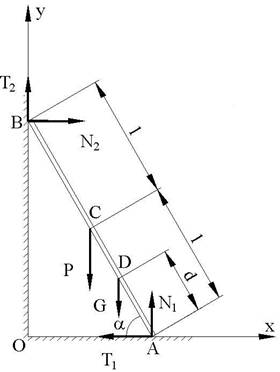
O scara omogena AB de lungime 2l si greutate P este rezemata pe sol si pe un perete vertical La distanta d de extremitatea B se afla un om de greutate G. Coeficientul de frecare intre scara si sol este m , iar cel intre scara si perete este m (fig.1).
|
|
Cunoscand unghiul de inclinare a , sa se determine distanta maxima d pentru care echilibrul este posibil. R. Asupra scarii actioneaza urmatoarele forte: a) forte exterioare cunoscute: greutatile P si G; b) forte de legatura: reactiunile normale N1, N2 in A si B impreuna cu fortele de frecare T1, T2. In raport cu axele Ox si Oy se scriu ecuatiile de echilibru: |
|
Fig.1 |

la care se adauga doua conditii de frecare
![]() exprimate la limita de
echilibru. Rezolvand sistemul de ecuatii rezulta:
exprimate la limita de
echilibru. Rezolvand sistemul de ecuatii rezulta:
![]()
Din ecuatia de echilibru a momentelor obtinem expresia
 ,
,
care, in cazul unei scari de greutate neglijabila, devine independenta de greutatea G a omului
![]() .
.
. Bara AB, sprijinita cu frecare pe un plan orizontal, este mentinuta in echilibru cu ajutorul unei contragreutati P.(fig.2). Cunoscand coeficientul de frecare m, unghiul b de inclinare a firului, sa se determine greutatea Q si unghiul a la echilibru.
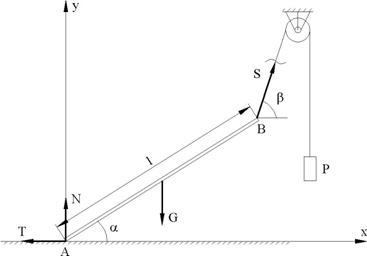
Fig.2
R. Ecuatiile de echilibru in raport cu sistemul xAy sunt
Pentru ca bara sa nu
alunece pe plan este necesara conditia ![]() . Din primele doua ecuatii se obtin
fortele
. Din primele doua ecuatii se obtin
fortele ![]() si valorile
greutatii Q la echilibru
si valorile
greutatii Q la echilibru
![]() .
.
Din ecuatia de momente obtinem pozitiile posibile de echilibru
![]() .
.
Acestor valori ale unghiului a vor corespunde urmatoarele forte de legatura
![]() .
.
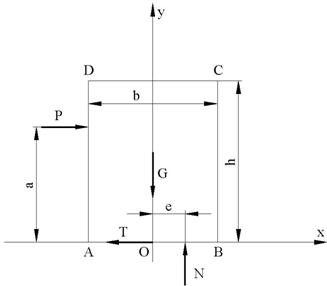
Un paralelipiped omogen ABCD de greutate G, se sprijina cu fata AB pe un plan orizontal. La distanta AE = a pe fata AD actioneaza o forta variabila P (fig.3). Cunoscand coeficientul de frecarem, sa se studieze echilibrul paralelipipedului in functie de P.
R. Se scriu trei ecuatii de echilibru
din care deducem ![]()
|
|
Pentru mentinerea
paralelipipedului in repaus, vom pune conditia de echilibru cu frecare Daca |
|
Fig.3 |
Daca ![]() , blocul nu aluneca si nu se rostogoleste
atunci cand
, blocul nu aluneca si nu se rostogoleste
atunci cand![]() ; pierderea echilibrului are loc prin alunecare pentru
; pierderea echilibrului are loc prin alunecare pentru ![]() .
.
Daca ![]() , paralelipipedul nu aluneca si nu se
rostogoleste pentru
, paralelipipedul nu aluneca si nu se
rostogoleste pentru ![]() ; iesirea din repaus se produce prin alunecare si
prin rostogolire in jurul punctului B.
; iesirea din repaus se produce prin alunecare si
prin rostogolire in jurul punctului B.
O bara AB = l de greutate G se sprijina pe doua suprafete perpendiculare. Bara este actionata in B de o contragreutate P (fig.4). Cunoscand: greutatea G, unghiul de inclinare a si coeficientul de frecare la alunecare m., sa se determine forta de frecare, reactiunile in A, B si limitele greutatii P ca bara sa ramana in echilibru.
R. Ecuatiile de echilibru sunt
din care rezulta ![]()
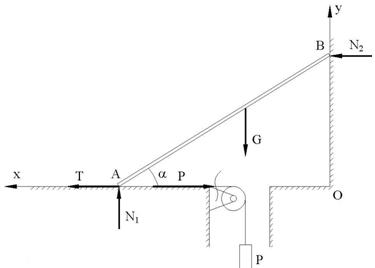
Fig.4
Capatul A al barei are
tendinta de a aluneca spre dreapta pentru valori mari ale
greutatii P. Daca P ia valori mici atunci apare
posibilitatea alunecarii in sens opus. Din conditiile de echilibru cu
frecare ![]() rezulta
rezulta
![]() .
.
Un disc de raza R si de greutate G este mentinut in echilibru pe un plan inclinat cu ajutorul unui fir paralel cu planul (fig.5). Cunoscand coeficientii de frecare de alunecare m si de rostogolire s, sa se studieze echilibrul discului in functie de greutatea P.
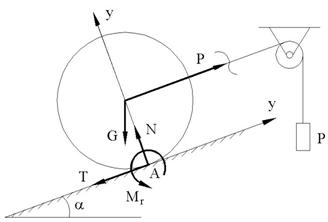
Fig.5
R. Asupra discului actioneaza fortele exterioare G, P reactiunea N, forta de frecare de alunecare T si cuplul de frecare de rostogolire Mr, reprezentate in ipoteza ca tendinta de alunecare si de rostogolire sunt amandoua in sus. Ecuatiile scalare de echilibru sunt
Ca sa nu apara alunecarea in
sus sau in jos sunt necesare conditiile ![]() , din care rezulta
, din care rezulta ![]() , iar pentru a evita rostogolirea in ambele sensuri trebuie
scrise noi conditii
, iar pentru a evita rostogolirea in ambele sensuri trebuie
scrise noi conditii ![]() , care conduc la
, care conduc la
![]() .
.
Sa se studieze echilibrul unei roti de raza r si greutate G, situata pe un plan inclinat sub unghiul a fata de orizontala, careia i se aplica un cuplu motor de moment M0. In centrul rotii actioneaza forta de rezistenta la inaintare F. Coeficientul de frecare la alunecare este m iar coeficientul de frecare la rostogolire este s (fig.6).
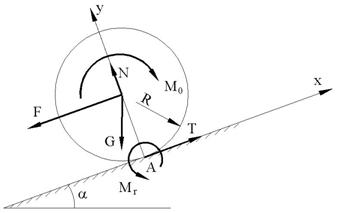
Fig.6
R. In raport cu sistemul de axe, ecuatiile de echilibru sunt
din care rezulta ![]() ,
, ![]() ,
, ![]() .
.
Deoarece forta de frecare are in
permanenta acelasi sens, conditia de echilibru cu frecare
la alunecare este ![]() , de unde rezulta
, de unde rezulta ![]() .
.
Pentru a inlatura posibilitatea rostogolirii rotii in ambele sensuri, vom scrie conditiile
![]() , care conduc la rezultatul
, care conduc la rezultatul
![]() .
.
Un disc de raza R si greutate G este mentinut in echilibru pe un plan inclinat cu unghiul a cu ajutorul unui fir care
este paralel cu planul si sustine o contragreutate P (fig.7). Cunoscand coeficientii de frecare de
alunecare![]() si de rostogolire s sa se determine:
si de rostogolire s sa se determine:
fortele de legatura;
limitele greutatii P pentru asigurarea echilibrului la
a) alunecare; b) rostogolire.
R. In ipoteza ca tendintele de alunecare si de rostogolire
sunt orientate in sus, asupra discului actioneaza fortele![]() si
si![]() , la care se adauga in punctul de contact A reactiunea normala
, la care se adauga in punctul de contact A reactiunea normala ![]() , forta de frecare
, forta de frecare ![]() si momentul de
frecare de rostogolire
si momentul de
frecare de rostogolire ![]() .
.
In raport cu reperul Axy, ecuatiile de echilibru sunt
![]()
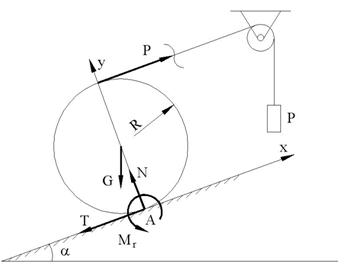
Fig.7
Ca sa nu apara alunecarea si rostogolirea in ambele sensuri vom scrie conditiile urmatoare
![]() ,
, ![]() .
.
Introducand![]() , mai intai se obtin limitele fortei P pentru ca discul sa nu alunece
, mai intai se obtin limitele fortei P pentru ca discul sa nu alunece
![]() ,
,
iar apoi conditia ca discul sa nu se rostogoleasca
![]() .
.
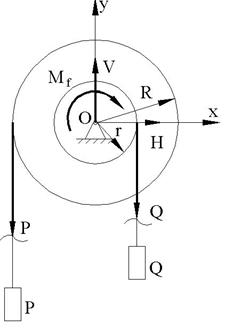
Un troliu este constituit din
doua roti coaxiale de raze r
si R. Pe roti sunt
infasurate doua fire la capetele carora se afla
greutatile P si Q (fig.8). Cunoscand coeficientul de
frecare in lagar![]() si raza axului troliului r , sa se determine raportul celor
doua greutati la echilibru. Greutatea troliului este
considerata neglijabila.
si raza axului troliului r , sa se determine raportul celor
doua greutati la echilibru. Greutatea troliului este
considerata neglijabila.
|
|
R. Fortele care
actioneaza sunt: greutatile Presupunand ca dezechilibrul ar avea loc in ambele sensuri, ecuatiile de echilibru sunt: la care se adauga conditia pentru momentul de frecare din lagar |
|
Fig.8 |
Rezolvand sistemul de ecuatii obtinem
![]()
![]() .
.
O bara cotita ABC de greutate 3G si dimensiuni AB = 2l si BC = l este articulata in A. In B actioneaza forta P pe directia CB iar in C o alta forta orizontala Q. Cunoscand unghiul a, raza r a articulatiei si coeficientul de frecare![]() din articulatie, sa se determine relatia intre
P, Q si G (fig.9).
din articulatie, sa se determine relatia intre
P, Q si G (fig.9).
R. Fiind o articulatie sferica, torsorul fortelor de
legatura este format din forta rezultanta ![]() (X, Y, Z)
si momentul de frecare
(X, Y, Z)
si momentul de frecare ![]() . Ecuatiile generale de echilibru sunt:
. Ecuatiile generale de echilibru sunt:
din care rezulta
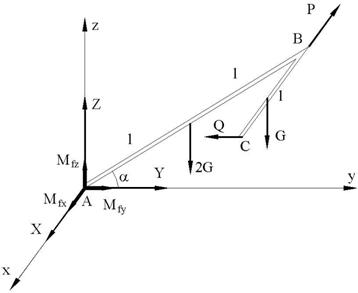
Fig.9
Inlocuind reactiunea ![]() si momentul de frecare din lagar
si momentul de frecare din lagar
![]()
in conditia
de frecare ![]() , se obtine relatia intre fortele P, Q
si G::
, se obtine relatia intre fortele P, Q
si G:: ![]()
Pe un plan orizontal se afla o bara de lungime l si greutate G. Sa se determine cuplul motor minim necesar rotirii barei in jurul centrului sau de greutate, cunoscand coeficientul de frecare la alunecare m (fig.10).
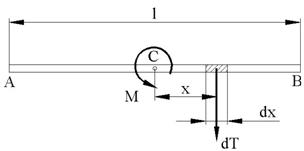
Fig.10
R. Presupunand o distributie constanta de presiuni![]() , reactiunea normala pe suprafata
elementara dA =1. dx este
, reactiunea normala pe suprafata
elementara dA =1. dx este ![]() , iar forta de frecare de alunecare maxima,
corespunza-toare cuplului motor minim, se scrie
, iar forta de frecare de alunecare maxima,
corespunza-toare cuplului motor minim, se scrie ![]() .
.
Momentul fortei de frecare in
raport cu axa de pivotare este ![]() .
.
Integrand aceasta ecuatie, rezulta momentul minim necesar rotirii barei, care va fi egal cu momentul maxim de frecare de pivotare:
![]() .
.
Copyright © 2025 - Toate drepturile rezervate