|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
Metode de pornire a masinii de inductie. Modificarea turatiei
1.Introducere
In functie de tipul constructiv (cu rotor bobinat sau cu rotor in colivie), se pot utiliza diverse metode de pornire a motorului asincron. Problemele de pornire a motorului asincron sunt legate, pe de o parte de valoarea mare a curentului la pornirea directa, si pe de alta parte de asigurarea unui cuplu de pornire suficient de mare pentru invingerea inertiei, frecarilor si eventual a cuplului rezistent al sarcinii (la pornirea in sarcina - mecanismul actionat cuplat la arbore).
Metode de pornire
Metodele generale de pornire nu depind de constructia rotorului, fiind aplicabile la orice fel de motor asincron.
Metodele generale de pornire a masinii de inductie sunt:
- pornirea directa
pornirea cu tensiune redusa: a.pornirea stea- triunghi
b.pornirea cu autotransformator
c.pornirea cu V.T.A
1Pornirea directa a masinii de inductie
In cazul in care se
alimenteaza motorul direct de la retea, curentul de pornire ![]() deoarece la turatia
n=0,respectiv s=1,rezistenta rotorica
deoarece la turatia
n=0,respectiv s=1,rezistenta rotorica ![]() are o valoare mult mai
mica decat in regim normal de functionare,la
are o valoare mult mai
mica decat in regim normal de functionare,la ![]() si deci impedanta
echivalenta a masinii este foarte redusa.La pornire, turatia fiind nula,
motorul asincron alimentat la tensiune nominala se comporta ca un transformator
la scurtcircuit de avarie.
si deci impedanta
echivalenta a masinii este foarte redusa.La pornire, turatia fiind nula,
motorul asincron alimentat la tensiune nominala se comporta ca un transformator
la scurtcircuit de avarie.
Totodata, la pornire, tensiunea electromotoare este nula:
![]() (1)
(1)
unde avem K- constanta masinii
![]() - fluxul prin masina
- fluxul prin masina
![]() - turatia masinii
- turatia masinii
 In vederea reducerii curentului de pornire, in cazul in care
de doreste
marirea cuplului, se utilizeaza rotoare cu bare inalte sau cu dubla colivie.Ne intereseaza in mod deosebit,
timpul de pornire cat si energia dispata in infasurari la conectarea directa la
retea.Timpul de pornire depinde de alura curbei cuplului , si de cuplul
rezistent.La cuplul rezistent,Mr, ecuatia miscarii de scrie:
In vederea reducerii curentului de pornire, in cazul in care
de doreste
marirea cuplului, se utilizeaza rotoare cu bare inalte sau cu dubla colivie.Ne intereseaza in mod deosebit,
timpul de pornire cat si energia dispata in infasurari la conectarea directa la
retea.Timpul de pornire depinde de alura curbei cuplului , si de cuplul
rezistent.La cuplul rezistent,Mr, ecuatia miscarii de scrie:
![]() (2)
(2)
j -moment de inertie
p1 - numarul de perechi de poli
Me - cuplul electromagnetic
Mr - cuplul rezisti
Constanta electromagnetica a masinii se defineste ca fiind:
![]() unde
unde ![]() cuplul critic (3)
cuplul critic (3)
T.e.m are valori pana la ordinul zecimilor de secunda, pentru masini mici, si de ordinul secundelor la masini mari.
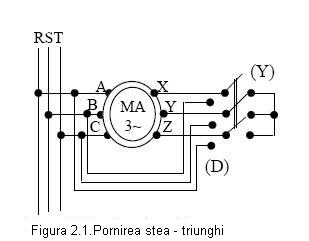
2Pornirea stea- triunghi
Pornirea stea - triunghi se aplica la motoarele care functioneaza cu infasurarea statorica in conexiune triunghi si necesita acces la toate capetele infasurarii trifazate statorice.Se utilizeaza un comutator special construit, sau o combinatie de intrerupatoare, care permit conectarea infasurarilor in stea pentru cuplarea la reteaua de alimentare si apoi schimbarea conexiunii in triunghi, dupa scaderea curentului absorbit din retea.
Schema electrica in cazul pornirii stea - triunghi este prezentata in figura de mai jos:
In cazul pornirii stea- triunghi avem urmatoarele considerente:curentul pe faza este
proportional cu tensiunea pe faza ,
iar cuplul este proportional cu patratul tensiunii:
 (4)
(4)
In cazul conexiunii stea avem urmatoarele relatii:
 (5)
(5)
In cazul conexiunii triunghi avem urmatoarele relatii:
 (6)
(6)
Facand referire la cuplu de pornire in ambele cazuri , vom avea:
![]() (7)
(7)
Caracteristica mecanica este reprezentata in figura de mai jos:
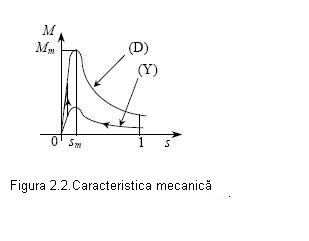
Pornirea se face cu conexiunea stea, pana in zona alunecarii
(turatiei) nominale, dupa care se trece la conexiunea triunghi. Saltul
punctului de functionare de pe o caracteristica pe alta se face la turatie
(alunecare) practic
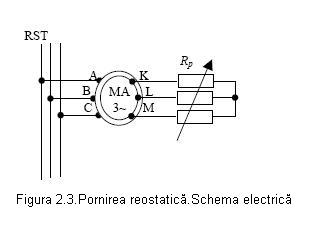
3.Pornirea reostatica
Presupune inserierea unui reostat trifazat de pornire cu
infasurarile de faza rotorice (ca in schema de mai jos). Reostatul de pornire este simetric in raport cu cele trei faze si rezistentele sunt conectate in stea. La pornire, rezistentele sunt conectate pe valoare maxima, iar pe masura ce creste turatia rotorului si scade curentul absorbit din retea, se micsoreaza rezistentele pana la scurtcircuitare. In timpul pornirii se urmareste ca intensitatea curentului sa nu depaseasca o anumita valoare maxima impusa(uzual, Ip < 2 In).Schema electrica este reprezentata in figura de mai jos:
Caracteristicile mecanice reostatice, asa cum s-a aratat, nu prezinta modificarea cuplului maxim ci numai a valorii alunecarii critice, care creste cu cresterea rezistentei rotorice si a valorii cuplului de pornire, ceea ce este un avantaj al utilizarii acestei metode.
Figura de mai jos arata (cu linie ingrosata) traseul punctului de functionare la pornire cu un reostat cu trei trepte.

Trecerea de la o treapta la alta se poate face automat, prin comanda temporizata, sau prin comanda in curent, a unor contactoare. Reostatul de pornire se dimensioneaza pentru functionare la curentul de pornire in regim de scurta durata.
4.Pornirea cu autotransformator
Limitarea curentului de pornire, care are la baza reducerea
tensiunii ce se aplica infasurarilor motorului, se poate realiza si cu autotransformatoare de pornire.
Acestea se folosesc cand nu este posibila utilizarea comutatoarelor stea-triunghi, deoarece motorul nu poate functiona in regim de durata cu infasurarile conectate in triunghi.
Se construiesc pentru tensiuni de 380, 500 si 1000 [V], cu o singura treapta de reducere a tensiunii, avand valoarea de 0,65 Un iar durata de pornire de 30 secunde. Se monteaza in cuva cu ulei.
Pentru comanda pornirii se asociaza cu aparate de conectare, manuale cu maneta sau contactoare.
In figura de mai jos este prezentata schema de alimentare a unui motor prin autotransformator de pornire, cu 3 contactoare. Schema de principiu este urmatoarea:
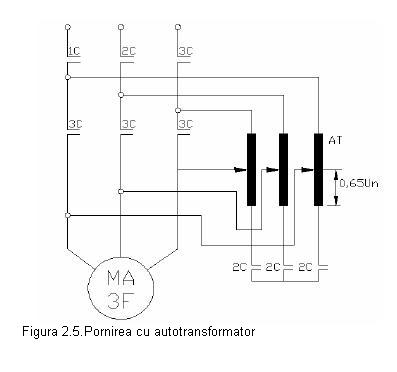
Pornirea masinii se face cu tensiune redusa data de catre autotransformator.
5.Pornirea motoarelor cu V.T.A
Anumite motoare functioneaza in medie sub 60% din puterea lor nominala. Pentru astfel de cazuri se recomanda utilizarea unor variatoare de tensiune trifazate cu tiristoare sau triace ( figura de mai jos) .
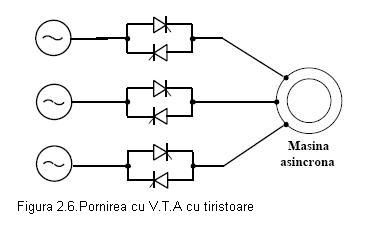
Se observa ca pe fiecare faza a masinii sunt
montate cate 2 tiristoare in antiparalel.Unghiul de comanda al tiristoarelor
este unghiul![]() .Schema se poate realiza utilizand si triace.In acest caz se
va monta cate un triac pe fiecare faza a masinii.Cele 2 tiristoare de pe
fiecare faza a masinii se vor comanda alternativ.
.Schema se poate realiza utilizand si triace.In acest caz se
va monta cate un triac pe fiecare faza a masinii.Cele 2 tiristoare de pe
fiecare faza a masinii se vor comanda alternativ.
Comanda tiristoarelor se face cu ajutorul unui generator de
pulsuri.Impulsurile pentru intrarea in conductie a tiristoarelor s se vor da in grila acestora.Generatoarele de pulsuri se vor monta cu plusul in grila tiristorului, si cu semnul minus in catodul tiristorului.
Viteza masinii se va modifica in functie de unghiul ![]() .Cu ajutorul variatoarelor de tensiune alternativa, se
realizeaza asa numitele
.Cu ajutorul variatoarelor de tensiune alternativa, se
realizeaza asa numitele
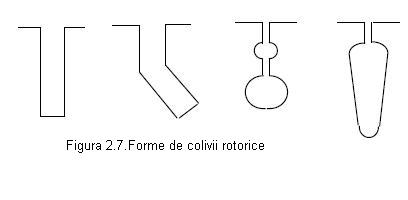
6.Pornirea motoarelor cu rotorul in colivie
Pornirea motoarelor cu rotor in colivie se bazeaza pe forma specifica a crestaturilor rotorice, mai precis a sectiunii transversale a barelor coliviei (figura de mai jos) care asigura la pornire (cand s = 1 si deci frecventa curentului prin barele rotorice are valoarea f2 = sf1 = f1) efect important de refulare a curentului, prin repartizarea densitatii de curent in bara preponderent spre deschiderea crestaturii, adica spre intrefier. In aceasta situatie se mareste rezistenta electrica a barei, deci a infasurarii rotorice, scazandu-se curentul de pornire si se reduce reactanta de dispersie a infasurarii rotorice, datorita saturarii locale a circuitului magnetic ceea ce mareste valoarea cuplului de pornire.Formele de colivii rotorice sunt reprezentate in figura de mai jos:
3 Modificarea turatiei masinii de inductie
Metodele principale de modificare a turatiei masinii de inductie sunt:
Spre deosebire de cazul motoarelor de c.c., modificarea caracteristicii mecanice a motoarelor asincrone in zona turatiei nominale (unde intereseaza de fapt reglajul), este foarte redusa prin metodele de reglare clasice: variatiile reostatice si ale tensiunii de alimentare.
Motoarele asincrone sunt in cea mai mare parte utilizate in actionari de turatie constanta, dar exista tendinta de extindere a domeniului lor de utilizare prin inlocuirea motoarelor de c.c. in actionari de turatie reglabila, prin alimentarea de la variatoare de tensiune, care permit reglarea simultana a tensiunii si a frecventei de alimentare, ducand atat la un reglaj eficient si economic, cat si la pastrarea performantelor masinii.
Aceasta solutie castiga teren in masura in care pretul variatoarelor de tensiune si frecventa isi motiveaza valoarea in raport cu eficienta instalatiei.
3.1.Modificarea numarului de perechi de poli.
Modificarea numarului de perechi de poli (p) se poate realiza atunci cand sectiuni ale infasurarii statorice (bobine sau grupuri de bobine) se pot combina, astfel incat sa rezulte diverse numere de perechi de poli, sau daca statorul este echipat cu doua infasurari, cu numere diferite de perechi de poli. In acest fel se realizeaza motoare cu pana la patru turatii diferite, insa pretul lor este ridicat deoarece constructia lor este pretentioasa, si coeficientul de utilizare a materialelor este scazut. Acest tip de reglaj se utilizeaza pentru motoare cu rotorul in colivie.
Un exemplu este motorul asincron monofazat, utilizat la masinile automate de spalat rufe si la unele tipuri de roboti de bucatarie, sau motorul trifazat care actioneaza ascensoarele cu mai
multe viteze.
3.Modificarea alunecarii.
Modificarea
alunecarii se poate realiza prin modificarea tensiunii
de alimentare ![]() , a rezistentei rotorice
, a rezistentei rotorice ![]() , sau a pierderilor
rotorice (
, sau a pierderilor
rotorice (![]() ).
).
Tensiunea ![]() se poate modifica doar
in sensul scaderii ei, pentru a nu pune in pericol integritatea izolatiei, deci
permite numai scaderi ale turatiei (prin cresterea alunecarii la Mr =
const); metoda este
se poate modifica doar
in sensul scaderii ei, pentru a nu pune in pericol integritatea izolatiei, deci
permite numai scaderi ale turatiei (prin cresterea alunecarii la Mr =
const); metoda este
economica in practica, dar pentru varierea tensiunii este necesara o instalatie adecvata (variator sau autotransformator), care necesita o investitie importanta si in functionare inrautateste si factorul de putere al retelei de alimentare. In plus, la scaderea tensiunii se
micsoreaza simtitor
cuplul maxim (M este proportional cu ![]() )
)
si factorul de supraincarcare, existand pericolul pierderii stabilitatii statice a motorului la o eventuala suprasarcina.
Pentru a varia rezistenta in circuitul rotoric se procedeaza ca la pornire, introducand in circuit un reostat trifazat, dar dimensionat pentru curentul rotoric la functionare in regim de durata; costul reostatului nu este prea mare, dar in functionare apar pierderi Joule suplimentare in rezistentele acestuia, scazand randamentul instalatiei. Reglajul reostatic are avantajul ca nu diminueaza factorul de supraincarcare. Ambele metode sunt putin eficiente la alunecarile mici la care functioneaza in mod normal motorul asincron.
3.3Modificarea frecventei tensiunii de alimentare
Modificarea frecventei se poate realiza cu ajutorul unei instalatii
speciale de alimentare cu tensiune si frecventa variabila (variator de
tensiune), construita cu elemente
semiconductoare comandate(tiristoare sau tranyistoare). Se poate astfel asigura
reglajul continuu si eficient al turatiei, dar instalatia este costisitoare (de
cca. zece ori mai scumpa decat motorul). Reglajul prin varierea exclusiva a
frecventei nu este recomandabil sa se realizeze in limite largi. Tensiunea ![]() se scrie conform
relatiei de mai jos:
se scrie conform
relatiei de mai jos:
![]() (8)
(8)
La scaderea frecventei ![]() fluxul magnetic creste
si poate conduce la saturarea circuitului magnetic si modificarea parametrilor motorului,
cat si la cresterea pierderilor in miez. De aceea, variatia se face in limite
restranse, sau se asociaza si variatia de tensiune,astfel ca mentinand raportul
U/f=U1/f1=constant sa se asigure flux magnetic constant.
fluxul magnetic creste
si poate conduce la saturarea circuitului magnetic si modificarea parametrilor motorului,
cat si la cresterea pierderilor in miez. De aceea, variatia se face in limite
restranse, sau se asociaza si variatia de tensiune,astfel ca mentinand raportul
U/f=U1/f1=constant sa se asigure flux magnetic constant.
Schema electrica,de principiu aferenta metodei U/f=constant este reprezentata in figura de mai jos:

Caracteristicile mecanice pentru metoda U/f=ct, sunt reprezentate in figura de mai jos:
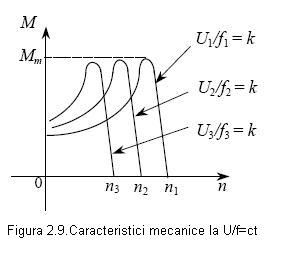
Dupa cum se vede, reglajul este eficient la orice cuplu de sarcina, variatia de turatie fiind proportionala cu cea de frecventa. La mentinerea raportului U/f=const., cuplul electromagnetic maxim este si el aproape constant (Mm scade foarte usor cu scaderea tensiunii si a frecventei), asa incat practic nu este afectata capacitatea de supraincarcare a motorului.
Reglajul nu se face si in sensul cresterii frecventei si tensiunii, deoarece la valori ale tensiunii mai mari decat cea nominala este posibil ca izolatia masinii sa fie suprasolicitata dielectric; de asemenea, prin cresterea frecventei se maresc pierderile, mai ales cele in miezul feromagnetic si scade randamentul motorului.
Exemple de instalatii care folosesc acest tip de reglaj sunt: alimentarea prin cicloconvertor a motoarelor asincrone trifazate utilizate in tractiune (locomotive) sau a motoarelor asincrone liniare (vehicule pe perna magnetica). Reglajul continuu de turatie
asociat
cu superioritatea constructiva a motorului asincron (d.p.d.v. al robustetii, randamentului si pretului mai scazut), fac ca acesta sa ia locul motorului de
c.c. si in tractiunea electrica.
In sistemele de actionari actuale, indiferent de metoda de reglare a vitezei utilizata, alimentarea motorului asincron tinde sa fie facuta in general de la convertoare statice de frecventa, care pot realiza modificarea atat a amplitudinii cat si a frecventei tensiunii de alimentare (aceasta si datorita complexitatii crescute a algoritmilor de reglare).
Ceea mai utilizata structura de alimentare este formata dintr-un redresor necomandat si un invertor cu modulatie in latime a impulsurilor, numit si invertor P.W.M. Acesta este construit de obicei cu tranzistoare I.G.B.T sau MOS de putere.Schema bloc pentru aliomentarea in acest fel este repreztata in figura de mai jos:
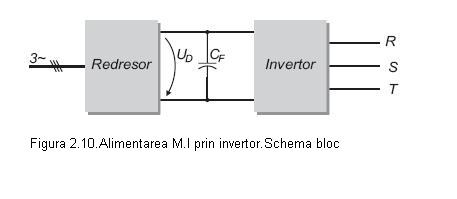
Ud- tensiunea redresata
Cf - condensator de filtrare
Pentru comanda vectoriala invertorul poate fi privit fie ca sursa de tensiune fie, in cele mai multe cazuri, ca sursa de curent.Elementele esentiale ce trebuie avute in vedere la proiectarea buclelor de curent cu ajutorul invertoarelor P.W.M., numite in acest caz si invertoare de curent, sunt: necesitatea asigurarii unei rezerve de tensiune care sa permita impunerea unor valori dorite ale amplitudinii curentilor prin motor (acest aspect apare in special la viteze mari, si se elimina prin asigurarea unei tensiuni de alimentare de current continuu suficiente pentru aplicatia dorita) si frecventa de comutatie care, pentru a asigura performante bune trebuie sa fie cat mai mare, dar care trebuie sa fie totusi mai mica decat frecventa maxima de lucru a dispozitivelor semiconductoare folosite.
Modularea in durata a impulsurilor (P.W.M.) este procedeul prin care intervalele de conductie ale contactelor se fragmenteaza in vederea obtinerii unui continut favorabil de armonici ale tensiunii de iesire a invertorului. In acelasi timp se obtin performante
dinamice
ridicate. Impulsurile de tensiune modulate in durata,
dupa o lege sinusoidala, se obtin prin
compararea unui sistem trifazat de tensiuni sinusoidale (semnalul modulator) cu un semnal de tensiune triunghiular (semnalul purtator). Cele trei tensiuni sinusoidale sunt defazate intre ele cu un unghi de 120°. Frecventa f1, a semnalului modulator este egala cu frecventa armonicii fundamentale a tensiunii de iesire din invertor. Frecventa ft a semnalului purtator triunghiular
trebuie sa fie mai mare decat f1, de cel putin doua ori. Calitatea formei de unda a tensiunii de iesire este cu atat mai buna cu cat frecventa ft este mai mare.
C.S.F cu invertoare bazate pe principiul modulatiei impulsurilor tensiunii de iesire dupa o lege sinusoidala (P.W.M.), prezinta cateva avantaje importante fata de C.S.F cu circuit intermediar de tensiune continua variabila:
- tensiunea de iesire are un continut redus de armonici de frecventa joasa;
- se obtin performante dinamice ridicate;
- factor de putere mai mare;
- gama de reglare a frecventei de iesire mai larga;
Atat amplitudinea, cat si frecventa tensiunii de iesire, sunt reglate din comanda invertorului. Acesta este principalul dezavantaj al C.S.F. cu invertoare P.W.M. (schema de comanda a invertorului este mai complicata). Pentru a inlatura acest dezavantaj s-au realizat
circuite integrate specializate pentru comanda de tip P.W.M. In acelasi timp s-au dezvoltat si tehnici de comanda numerica (P.W.M. digital).
Schema principala de comanda a unui invertor P.W.M este reprezentata in figura de mai jos:
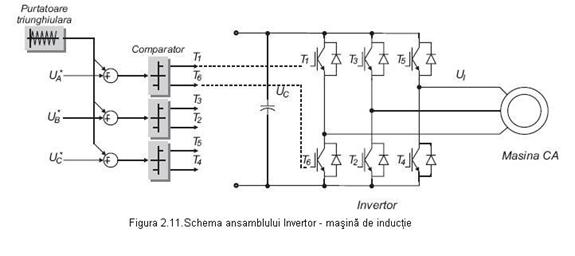
Partea de forta este formata dintr-un invertor trifazat cu tranzistoare.
Acesta este alimentat de la o tensiune continua ![]() si este
comandat pe principiul modularii in latime a impulsurilor utilizandu-se:
si este
comandat pe principiul modularii in latime a impulsurilor utilizandu-se:
- semnal triunghiular de referinta (semnal purtator) de frecventa 10 kHz;
- semnal modulator
trifazat sinusoidal: ![]()
In aceasta situatie frecventa si amplitudinea sunt constante. Intr-un sistem de reglare insa aceste marimi sunt impuse de
partea de comanda. Semnalul modulator este comparat cu semnalul triunghiular, la iesirea comparatoarelor CA, CB, CC obtinandu-se impulsurile de comanda pe baza pentru cele sase tranzistoare. In
practica aceste impulsuri sunt aplicate unor circuite special concepute in acest sens numite dispozitive de comanda pe grila.
In schemele de reglare vectoriala tensiunile de referinta sunt generate de obicei de catre regulatoarele de curent. Din acest motiv invertorul se va comporta ca o sursa de curent impus.
Tinand cont de influenta mica a modelului invertorului, acesta va fi neglijat in modelarea diverselor structuri de reglare. De asemenea este neglijata si sursa de alimentare in curent continuu a invertorului, aceasta presupunandu-se a fi ideala. Aceasta duce la simplificarea modelului global, fara a afecta negativ rezultatele.
Pentru o apreciere reala a situatiei este de dorit insa si o analiza a sursei de curent continuu a invertorului, de obicei un redresor necomandat sau comandat, si influenta acestuia atat asupra tensiunii din circuitul intermediar de curent continuu, cat si influenta sa asupra retelei de alimentare.
Majoritatea aplicatiilor practice cu motoare asincrone utilizeaza, ca alimentare, reteaua trifazata de tensiune sinusoidala de 50 Hz. Metodele performante de reglare a vitezei implica modificarea atat a amplitudinii cat si a frecventei tensiuni de alimentare. Solutia frecvent utilizata pentru rezolvarea problemei este ca aceasta tensiune alternativa sa fie redresata cu ajutorul diodelor, obtinandu-se o tensiune continua fixa.
Aceastaeste apoi aplicata unui invertor P.W.M. ce permite obtinerea unui sistem trifazat de tensiuni cu parametri reglabili. In cazul redresoarelor cu diode, transferul de putere este unidirectional, de la reteaua de alimentare catre receptor. Deoarece este de dorit ca tensiunea continua sa contina ondulatii cat mai mici, la iesirea redresorului este prevazut un condensator de capacitate mare pentru filtrare. In consecinta, curentul prin redresor devine discontinuu - adica atinge valoarea zero in fiecare semiperioada a tensiunii de alimentare.
Copyright © 2025 - Toate drepturile rezervate