|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
SISTEM DE REGLARE A VITEZEI PENTRU LIFT
CONTROL ORONA SERVO
INVERSOR Unidrive SP
CU CONTROLLER ARCA
(Avansat)
MANUAL DE INSTRUCTIUNI
CUPRINS
1.INTRODUCERE
2.CARACTERISTICILE INVERSORULUI
2.1. VEDERE GENERALA
2.2. DIMENSIUNI CONCRETE
2.3. INSTALATIA ELECTRICA
2.3.1. Conexiuni de alimentare
2.3.2. Compatibilitate electromagnetica
2.4. CONEXIUNILE DE CONTROL
2.5. TASTATURA DE PROGRAMARE
2.5.1. Utilizarea tastaturii
2.5.2. Accesul la meniurile avansate
2.5.3. Procedura pentru salvarea parametrilor
2.6. DIAGNOZA
2.7. PROGRAMAREA INVERSORULUI
2.7.1. Programarea M33
2.7.2. Programarea M322 si a M33_Extins
2.8. CITIREA SI STOCAREA DATELOR IN "SMARTCARD"
2.8.1. Programarea inversorului prin citirea SMARTCARD-ului
2.8.2. Stocarea datelor in SMARTCARD din inversor
2.8.3. Erori de programare
3.REGLAREA INVERSORULUI
3.1.CONFIGURAREA MOTORULUI SI A CODIFICATORULUI
3.1.1. Masina asincrona
3.1.2. Masini sincrone
3.2.DIRECTIA ROTIRII CODIFICATORULUI
3.2.1. Masini M322
3.2.2. Masini M33
3.2.3. M33_Extinse
3.3.GENERAREA PROFILELOR(VITEZA ,ACCELERATIE SI CURBE IN S)
3.3.1. Referinta de viteza
3.3.2. Reglarea profilului de viteza
3.4.GRAFICE ALE SECVENTELOR DE MISCARE
3.4.1. Secventa generala
3.4.2. Secventa de miscare pemtru M33
3.4.3. Secventa de miscare pentru M322 si M33_Extins
3.5.COMPENSAREA INCARCATURII(M33 si M33_Ext)
3.5.1. Parametri compensarii incarcaturii
3.5.2. Valori din fabrica
3.6.FUNCTIONAREA IN MODUL DE SALVARE ( M22 SI M33_Extins)
3.6.1. Schema sistemului de salvare
3.6.2. Parametri salvarii
4.PARAMETRI DE BAZA (MENIUL 0)
4.1.PARAMETRII M322
4.2.PARAMETRII M33
4.3.PARAMETRI M33_Extins
5.PARAMETRI INVERSORULUI
5.1.PROGRAMAREA "M322 11Kw_4polEs_PLC"
5.2.PROGRAMAREA "M33 V1.6_10-13p_Izq"(Stanga)
5.3.PROGRAMAREA "M33_Ext V1.6_21p_Izq"(Stanga)
6.INDICATII DE REOARE
7.SCHEME ELECTRICE
7.1.SCHEME DE ALIMENTARE ELECTRICA
7.1.1.Motor asincron 'Fara salvare' ( 0461017)
7.1.2.Motor asincron 'Cu salvare'(0461018)
7.1.3.Motor sincron 'Fara salvare' ( 0461011)
7.1.4.Motor sincron 'Cu salvare'(0461016)
7.2.LANT DE SIGURANTA
7.2.1.Motor asincron (0461019)
7.2.1.Motor sincron (0461012)
1.INTRODUCERE
Unidrive_SP este un inversor fabricat de 'Control Techniques'(Tehnici de control) si
poate functiona atat cu masini asincrone cat si cu cele sincrone .
In ceea ce priveste lifturile Orona , acest inversor va fi utilizat pentru masinile
asincrone in bucla inchisa ( cu codificator) si pentru masini sincrone ( M33) .
Inversorul ORONA V3F Unidrive SP este un controller pentru directia liftului .
Inversorul este compus dintr-un inversor de frecventa cu tranzistoare IGBT , care
functioneaza in pulsuri de latime de modulatie cu comutare de inalta frecventa ( 3-16 kHz) asigurandu-se o functionare silentioasa . Sistemul permite impunerea unui voltaj si o alimentare frecventa a motorului , reglabila . Acest lucru contribuie la o precizie inalta in controlul vitezei si la cuplul de torsiune in tot intervalul de valori a vitezei motorului .
In timpul opririi energia returnata de motor este disipata de catre o rezistenta in
interiorul unitatii de franare .
Pentru a se garanta compatibilitatea electromagnetica ( CEM) , inversorul are un
filtru anti-interferenta la intrarea sursei de alimentare .
Unitatea de control este bazata pe un sistem digital microprocesor , care
controleaza viteza , pozitia rotorului si pozitia motorului in toate conditiile de incarcare in orice moment prin intermediul informatiilor despre pozitia reala a motorului si curentul de iesire .Deasemenea controleaza evolutia profilului de viteza pentru a atinge caracteristicile optime de comfort , precizia si pastrarea energiei .
2.CARACTERISTICILE INVERSORULUI
In acest capitol se sumarizeaza caracteristicile inversorului .
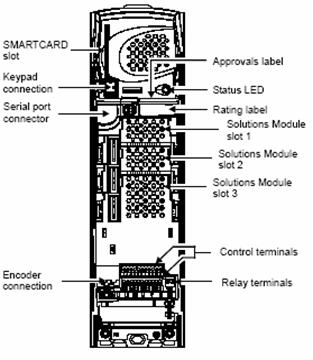
2.1.VEDERE GENERALA
2.2.DIMENSIUNI CONCRETE
|
Referinta |
Dimensiune |
(kW) |
Inominal(A) |
|
SP2401 |
2 |
5.5 |
13.0 |
|
SP2402 |
2 |
7.5 |
16.5 |
|
SP2403 |
2 |
11.0 |
25.0 |
|
SP3401 |
3 |
15.0 |
32.0 |
|
SP3402 |
3 |
18.5 |
40.0 |
|
SP3403 |
3 |
22.0 |
46.0 |
2.3.INSTALATIA ELECTRICA
2.3.1.Conexiuni de alimentare
Cutia controller-ului are intrerupatoare principale pentru conectarea jonctiunii
la inversor (L1,L2,L3).Apoi este conectata prin intermediul unui filtru extern pentru a se evita emisiile electromagnetice .
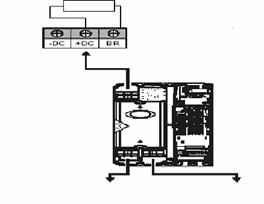
Conexiunea rezistentelor franei este realizata in terminalele +DC si BR .
Conectarea iesirii la motor este realizatat prin intermediul contactorilor de
alimentare C1 si C2 in terminalele U,V,W.
In figura 3.1. este aratata conexiunea de alimentare de baza .
2.3.2.Compatibilitate electromagnetica
Filtre si ferite
Dispozitivele au un filtru intern si un filtru extern care controleaza si evita emisia frecventei radio in sursa prinsipala de alimentare . ( FITO in schema 0451117)
Pe langa acestea , in iesirea inversorului fiecare dintre cele 3 fire vor
trece prin ferita intorcandu-se de 3 ori ( vezi figura 2.2.)
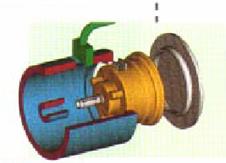
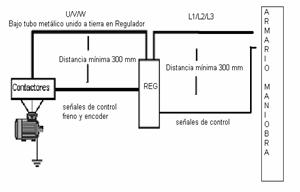
Instalarea inversorului pe motor
Cablurile de alimentare ( U/V/W) dintre controller si motor ar trebuie sa mearga sun tubul ecranat metalic. Aceasta armura este adaugata la termianlul dinspre pamant al inversoului Unidrive.
In timpul asamblarii trebuie pastrata o distanta minima de 300mm intre cablurile de alimentare si cablurile de semnal , conform figurii 2.3.
Conexiuni alternative
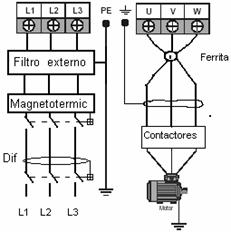
Figura 2.1.Schema de alimentare

Figura 2.2.Ferita
2.4.CONEXIUNILE DE CONTROL
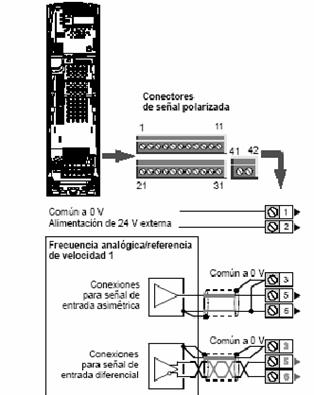
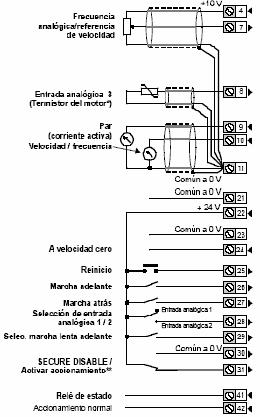
Cele mai semnificative semnale utilizate de acest inversor sunt :
Intrarile complete si lista de iesiri este arata in urmatoerele cadrane .Sunt aratati deasemenea parametri inversorului unde este posibila verificarea starii acestor intrari/iesiri :
Meniul 7: I/O analogice
|
Intrari |
||
|
Terminale |
Valoarea semnalului |
|
|
Sistemul de greutate |
7(+) si 6(-), (punte intre 6 si 3) |
0.25 |
|
Semnalul sus |
5 (se conecteaza +) |
7.01 |
|
Semnalul jos |
8 (se conecteaza +) |
7.03 |
Meniul I/O digitale
|
Intrari |
||
|
Terminale |
Valoarea semnalului |
|
|
Nivel ridicat(S7) |
29(se conecteaza +) | |
|
Nivel mediu(S6) |
28(se conecteaza +) | |
|
Nivel scazut(S5) |
27(se conecteaza +) | |
|
Salvare(Ext 5) |
26(se conecteaza +) | |
|
Dezactivare sigura |
31(se conecteaza +) | |
|
Iesiri |
||
|
Terminale |
Valoarea semnalului |
|
|
Releul de frana |
24(+) si 11(-) | |
|
Sursa |
||
|
Terminale |
Valoarea semnalului |
|
|
Sursa |
24 Vdc |
|
|
Comun |
0 Vdc |
|
2.5.TASTATURA DE PROGRAMARE
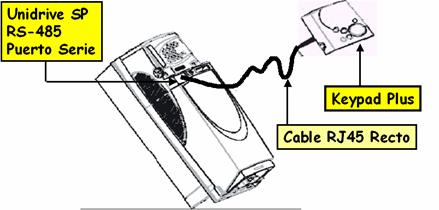
Desi exista doua tipuri diferite de tastaturi de programare , in cazul ORONA vom utiliza 'SM-Keypad Plus' deoarece este singura care poate fi conectata la distanta printr-un grafit cu conector RJ45.
Tastatura are un ecran cu trei linii orizontale alfanumerice si cateva butoane pentru optiuni de ecran :
Joypad Help Modul(negru) Start(verde) Stop/Restart(rosu) Inainte/Inapoi(albastru![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
2.5.1. Utilizarea tastaturii
Tastatura este utilizata pentru miscarea prin structura de parametrri si
modificarea valorilor lor .
Butonul 'Modus' permite schimbarea diferitelor moduri de prezentare :
vizualizarea parametrilor , editarea parametrilor si starea .
Cele trei butoane colorate sunt butoane de control , care permit manevrarea
functiior dispozitivului in cazul in care este selectat modusul tastaturii .
Butonul de help descrie parametrul selectat .
2.5.2. Accesul la meniurile avansate
Initial , accesul la meniurile avansate este blocat , si pentru a avea acces la ele
este nevoie de schimbarea parametrului Pr 0.49:
|
Valoarea (Pr 0.49) |
Nivelul de acces | |
|
L1 |
Meniul 0 |
Valori presetate |
|
L2 |
Meniul Avansat |
Meniuri de la 0 la 21 |
2.5.3. Procedura pentru salvarea parametrilor
salvat temporar apasandu-se butonul M , dar este necesara introducerea valorii 1000 in x.00 ( orice meniu) si se apasa butonul M+butonul rosu pentru salvarea dateor in memorie , deoarece altfel aceasta informatie este pierduta dupa oprirea alimentarii .
2.6.DIAGNOZA
In ecranul dispozitivul se ofera informatii despre starea dispozitivului . Indicatiile sunt incluse in 3 categorii :
Indicatii de alarma
Alarma palpaie in toate modurile si daca nu sunt luate masurile necesare
pentru rezolvarea problemei se deconecteaza dispozitivul .
|
Afisaj inferior |
Descriere |
|
Br.rS |
Supraincarcarea rezistorului de franare |
|
Acumulatorul rezistorulu de franare (Pr 10.37) din dispozitiv a atins 75.0% din valoarea la care dispozitivul se va opri si franarea IGBT este active . |
|
|
Fierbinte |
Supraincarcarea sau placa de control sau inversorul IGBT peste alarmele de temperatura sunt active . |
|
|
|
OVld |
Supraincarcarea motorului |
|
Acumolatorul motorului din dispozitiv a atins 75% din valoarea la care se va opri si incarcatura din sipozitiv este > 100%. |
|
Indicatii de stare
|
Afisajul superior |
Descriere |
Starea iesirii dispozitivului |
|
|
ACt |
Modul de regenerare activ. |
Activat |
|
|
Unitatea de regenerare este active si sincronizata cu alimentarea . |
|||
|
ACUU |
Pierderea de current AC |
Activat |
|
|
Dispozitivul a detectat ca sursa AC a fost pierduta si incearca sa mentina voltajul magistralei DC prin decelerarea motorului. |
|||
|
*Autoreglare |
Autoreglare in desfasurare |
Activat |
|
|
Procedura de autoreglare a fost initializata.'*Auto' si `tune` vor palpai alternative pe afisaj . |
|||
|
dc |
DC aplicat motorului |
Activat |
|
|
Dispozitivul aplica franarea prin injectie DC. |
|||
|
dEC |
Decelerare |
Activat |
|
|
Dispozitivul decelereaza motorul . |
|||
|
inh |
Inhibare |
Dezactivat |
|
|
Dispozitivul este inhibat si nu poate functiona .Semnalul de activare a dispozitivului nu este aplicat terminalului 31 sau Pr 6.15 este setat la 0 . |
|||
|
POS |
Pozitionare |
Activat |
|
|
Dispozitivul pozitioneaza /orienteaza motorul liftului . |
|||
|
rdY |
Pregatit |
Dezactivat |
|
|
Dispozitivul este pregatit pentru functionare. |
|||
|
run |
Functionare |
Activat |
|
|
Dispozitivul functioneaza |
|||
|
SCAn |
Scanare |
Activat |
|
|
OL> Dispozitivul cauta frecventa motorului cans se sincronizeaza unui motor rotativ . Regen> Dispozitivul este activate si se sincronizeaza cu linia . |
|||
|
StoP |
Oprire sau viteza tinde spre zero |
Activat |
|
|
Dispozitivul are o viteza spre viteza zero . Regen> Dispozitivul este activate dar voltajul AC este prea scazut , sau magistrala de voltaj DC in creste sau scade . |
|||
|
triP |
Conditia de oprire |
Dezactivat |
|
|
Dispozitivul s-a oprit sau nu mai controleaza motorul . Codul de oprire apare pe afisajul superior . |
|||
2.7.PROGRAMAREA INVERSORULUI
Inversorul Unidrive_SP de la 'Control Techniques ' permite o programare
speciala numita 'Proframare PLC' ( este un mic controller programabil intern).Acest program permite atingerea adaptarilor de semnal si programari speciale necesare pentru lifturi M322 si M33_Extinse ( In cazul lifturilor M33_Extinse performantele au fost imbunatatite ) .
Datorita acestui PLC , au fost adaugate in inversor . Asadar , exista parametri
noi privind acest aspect in meniul 0 .
Printre aceste noi functii se afla :
'Controlul franei' impreuna cu 'Aplicarea cuplului de torsiune de-a lungul
unei pante'
'Modul de salvare in directie faviorabila ' fara semnal de greutate al
dispozitivului .
Limite independente ale Cuplului de torsiune in mod normal si mod de
salvare .
Pornirea pozitiei de control
Sumarizand , programarea pentru fiecare caz este urmatoarea :
|
Instalatie |
Programarea "Standard" |
Programarea "PLC" |
|
M33 |
Da |
Nu |
|
M322 |
Da |
Da |
|
M33_Extins |
Da |
Da |
2.7.1.Programarea M33
In instalatiile M33 nu este necesara introducerea programarii 'PLC asadar
poate fi programata prin intermediul tastaturii de programare . Pasii sunt urmatorii :
Programarea standard prin programul 'CTSoft' , un 'SmartCard' (Pasii sunt
detaliati in capitolul 2.8) sau o tastatura de programare .
2.7.2.Programarea M322 si a M33_Extins
In aceste instalaltii este necesara introducerea programarii 'PLC' astfel inca
este necesara utilizarea unui program specific sau a unui 'SmartCard' ce contine programare 'PLC'. Pasii pentru programarea inversorului sunt :
Programarea 'PLC' prin intermediul programului 'SYPYLite' sau prin
intermediul unui 'SmartCard' (Pasii sunt detaliati in capitolul 2.8.)
Programarea 'Standard' prin intermediul programului 'CTSoft', un
'SmartCard' (pasii sunt detaliati in capitolul 2.8) sau o tastatura de programare
2.8.CITIREA SI STOCAREA DATELOR IN "SMARTCARD"
Toate inversoarele instalate vor furniza un SMARTCARD.
Smartcardul este utilizat pentru :
-Stocarea tuturor valorilor parametrilor dispozitivului ( va fi realizat in cadrul
Orona)
-Se recupereaza parametrii motorului (in cazul in care inversorul trebuie
inlocuit)
Asigurati-va ca ati instalat SMARTCARD-ul cu contactele orientate in partea
dreapta a dispozitivului .Dispozitivul comunica cu SMARTCARD-ul doar cand are o comanda de citire sau scriere de unde rezulta ca este conectat cardul in orice moment .
Figura 3.5.
a) Instalarea Smartcardului
b) Smartcardul instalat
2.8.1.Programarea inversorului prin citirea SMARTCARD-ului
Acest lucru este util cand inversorul trebuie schimbat.Inversorul de rezerva
trebuie sa aiba aceleasi caracteristici ca cel original . Daca nu este cazul , SMARTCARD-ul va crea probleme .
Se descarca programul 'PLC' in inversor ( doar pentru lifturi M322 si
M33_Extins)
o Se pune in parametrul X.00 = 6004+ se apasa tasta M + se apasa tasta
rosie
![]()
Se descarca programul 'Standard' in inversor
o
Se pune in parametrul X.00 = 6001+ se apasa
tasta M + se apasa tasta rosie ![]()
Este acelasi lucru ca si punerea in parametrul 0.30 = rEADd +se apasa tasta
M + se apasa tasta rosie ![]()
Se salveaza schimbarile in memorie prin introducerea x.00 = 1000+se apasa
tasta M +
se apasa tasta rosie ![]()
Nota:In timpul programarii ar putrea aparea niste erori daca pasii nu sunt
realizati corect . In aceste cazuri se verifica in capitolul 2.8.3. care este problema si se repeta pasii .
2.8.2. Stocarea datelor in SMARTCARD din inversor
Acest lucru este util cand este realizata o modificare la codificatorul liftului
sau in liftul propriu-zis . In aceste cazuri cand este necesara realizarea auto-reglarii sau a schimbarii unghiului codificatorului , este importanta pastrarea parametrilor nou-modificati in SMARTCARD.

2.8.2.1.Actualizarea unui SMARTCARD deja programat din fabricatie
Deprotejarea SMARTCARD-ului
o Se
pune in parametrul X.00 = 9777+ se apasa tasta M + se apasa tasta rosie ![]()
Se stocheaza programul 'Standard'
o
Se pune in parametrul 0.30 = Prog+ se apasa
tasta M + se apasa tasta rosie ![]()
Protejarea SMARTCARD-ului
o
Se pune in parametrul X.00 = 9888+ se apasa tasta
M + se apasa tasta rosie ![]()
2.8.2.2.Programarea unui SMARTCARD gol(fara programare anterioara )
Deprotejarea SMARTCARD-ului
o
Se pune in parametrul X.00 = 9777+ se apasa
tasta M + se apasa tasta rosie ![]()
Stergerea SMARCARD-ului
o
Se pune in parametrul X.00 = 9999+ se apasa
tasta M + se apasa tasta rosie ![]()
Se stocheaza 'PLC'-ul
Se stocheaza programul 'Standard'
o
Se pune in parametrul X.00 = 3001+ se apasa
tasta M + se apasa tasta rosie ![]()
Este acelasi lucru ca si punerea in parametrul 0.30 = Prog +se apasa tasta M
+ se apasa
tasta rosie![]()
Protejarea SMARTCARD-ului
o Se pune in parametrul X.00 = 9888+ se apasa tasta M + se apasa tasta rosie
Nota:In timpul programarii ar putrea aparea niste erori daca pasii nu sunt realizati corect . In aceste cazuri se verifica in capitolul 2.8.3. care este problema si se repeta pasii .
2.8.3. Erori de programare
De fiecare data cand apar astfel de erori este necesara punerea parametrului
X.00 = 0000 + se apasa tasta M + se
apasa tasta rosie ![]() pentru a elimina eroarea inversorului
.
pentru a elimina eroarea inversorului
.
Apoi se rezolva problema cu ajutorul informatiilor furnizate de eroare si
capitolle 2.8.1.si 2.8.2.
|
Oprire |
Diagnoza |
|
C.Acc |
Oprirea Smartcardului : Citire/Scriere pe Smartcard |
|
185 |
Se verifica daca Smartcardul este fixat / localizat corespunzator . Se inlocuieste Smartcardul . |
|
C.boot |
Modificarea parametrilor din meniul 0 nu poate fi salvata deoarece fisierul necesar nu a fost creat pe Smartcard . |
|
177 |
A fost initiate o scriere pe un parametru din meniul 0 prin intermediul tastaturii cu Pr 11.42 setat la auto(3) sau boot(4) , dar fisierul necesar nu a fost creat pe Smartcard . Se asigura ca Pr 11.42 este setat corect si se reseteaza dispozitivul pentru a se crea fisieurl necesar pe Smartcard .Se reincearca scrierea parametrului pe parametrul din meniul |
|
C.BUSY |
Smartcardul nu poate realiza functia ceruta deoarece este accesatat de un Modul de solutii . |
|
178 |
Se asteapta ca modulul de solutii sat ermine accesarea Smartcardului si apoi se incearca din nou accesarea functiei . |
|
C.Chg |
Locatia datelor deja contine datele . |
|
179 |
Se sterg datele din locatia datelor . Se scriu datele intr-o locatie alternativa. |
|
C.Cpr |
Valorile stocate in dispozitiv si valorile din blocul de date de pe Smartcard sunt diferite . |
|
188 |
Se apasa butonul rosu de resetare , |
|
C.dat |
Locatia specificata a datelor nu contine nici o data . |
|
183 |
Asigurati-va ca numarul blocului de date este corect . |
|
C.Err |
Datele de pe Smartcard sunt compromise . |
|
182 |
Asigurati-va ca datele sunt localizate corect .Se sterg datele si se incearca din nou . Se inlocuieste Smartcardul . |
|
C.Full |
Smarcardul este plin . |
|
184 |
Se sterge un bloc de date sau se utilizeaza un alt Smartcard . |
|
C.Optn |
Modulele de solutii fixate sunt diferite intre dispozitivul sursa si dispozitivul destinatie . |
|
180 |
Asigurati-va ca ,odulele de solutii sunt fixate . Asigurati-va ca modulele de solutii sunt in aceeasi fanta de module de solutii . Se apasa butonul rosu de resetare . |
|
C.rdo |
Smarcardul are setat doar un bit de citire . |
|
181 |
Se introduce 9777 in Pr xx.00 pentru a apermite Smartcardului acces la citire/scriere . Asigurati-va ca nu se scrie la locatii de date intre 500 si 999. |
|
C.rtg |
Smartcardul incearca sa schimbe dispozitivul destinatie estimat. Nu au fost transferati parametric ai dispozitivului . |
|
186 |
Se apasa butonul rosu de resetare . Parametri dispozitivului sunt :
Parametri de mai sus vor fi setati la valoarea lor standard . |
|
C.Typ |
Setul de parametri ai Smartcardului nu sunt compatibili cu dispozitivul |
|
187 |
Se apasa butonul rosu de resetare . Asigurati-va ca tipul dispozitivului destinatie este acelasi ca tipul fisierului dispozitivului parametrului sursa . |
3.REGLAREAINVERSORULUI
3.1 CONFIGURAREA MOTORULUI SI A CODIFICATORULUI
Acest tip de inversor este utilizat atat pentru masini asincrone (M322) si
sincrone(M33 si M33_Extins) , dar intotdeauna de-a lungul unui docificator (bucla inchisa) .Din acest motiv este necesar sa se indice atat parametri legati de masina cat si parametri legati de codificator.
Reglarea inversorului ( auto-reglarea) masinii si codificatorul sunt realizate in
fabrica ORONA pentru fiecare instalare . Apoi , parametri sunt stocati in SMARTCARD pentru a putea fi recuperati in cazul in care este nevoie de schimbarea inversorului sau daca parametri au fost stersi ( vezi capitolul 2.8) .
In continuare sunt prezentati parametrii caracteristici pentru fiecare tip de
masina (sincrona sau asincrona) si tipurile lor de codificatoare .
3.1.1. Masina asincrona
Cu acest tip de lift ( daca nu este unul special , nu este necesara auto-reglarea
deoarece valorile parametrilor de autoreglare se repreta pentru fiecare tip de lift . Aceste valori sunt cele prezentate in tabelul de mai jos .
Daca liftul este unul special sau nu apere in urmatorul tabel , este necesara autoreglarea . In tabelul de mai jos sunt prezentate valorile caracteristice preluate in procesul de auto-reglare realizat in fabrica .
3.1.1.1.Tabelul de valori al M322
|
1500 rpm (4 poli) |
1000 rpm (6 poli) |
|||||
|
Parametri |
4Kw |
5.5Kw |
11Kw |
4Kw |
5.5Kw |
|
|
Castigul de curent al controllerului Kp | ||||||
|
Castigul de curent al controllerului Ki | ||||||
|
Frecventa estimate | ||||||
|
Curentul estimat al motorului | ||||||
|
Viteza estimate | ||||||
|
Voltajul estimate | ||||||
|
Factorul de putere estimate | ||||||
|
Numarul de poli ai motorului | ||||||
|
Rezistorul statorului | ||||||
|
Frecventa maxima de intrerupere | ||||||
|
Inductanta transienta (σLs) | ||||||
|
Inductanta statorului (Ls) | ||||||
|
Punctul de intrerupere 1 al saturatiei motorului | ||||||
|
Punctul de intrerupere 2 al saturatiei motorului | ||||||
|
Cuplul de torsiune per Amp, Kt | ||||||
Daca la locul instalarii liftul nu respecta valorile din tabel este necesara realizarea auto-reglarii . Altfel liftul nu va putea functiona corespunzator .
3.1.1.2.Codificatorul incremental

HEIDENHAIN ERN 430
3.1.1.3.Procesul de autoreglare "Motor asincron"
|
Parametri |
Valoare |
|
|
Tipul codificatorului |
Pr 3.38 |
Ab (0) pentru o cuadratura a codificatoruluifara semnale de comutare. |
|
Alimentarea cu voltaj a codificatorului |
Pr 3.36 |
15 V (2) |
|
Numarul de linii per rotire a codificatorului |
Pr 3.34 | |
|
Terminarea selectiei codificatorului |
Pr 3.39 |
1 = rezistorii A, B de terminare activati si rezistorii Z de terminare activati |
|
Nivelul de detectie a erorii a codificatorului |
Pr 3.40 |
1 = Detectarea ruperii cablului cu A, B si Z activati. |
Nu este necesara cand inversorul a fost schimbat
In cazul in care trebuie schimbat inversorul , nu este necesara realizarea autoreglarii . In SMARTCARDUL inserat in fiecare inversor sunt stocati toti parametrii originali . Este suficienta descarcarea datelor stocare in inversor .
Procesul de descarcare este detaliat in capitolul 2.8.-Citirea si stocarea datelor in SMARTCARD .
Auroreglarea trebuie realizatat in urmatoerele cazuri
Cand liftul este unul special
Cand liftul nu apare in tabel
Pasii care trebuie urmati pentru realizarea auto-reglarii sunt urmatorii :
Se ridica cablurile de tractare pentru a permite liftului sa se roteasca fara cabluri .
Se fixeaza intrerupatorul statiei de urgenta in pozitia "INSP"
Se forteaza placa de frana sa intre in pozitia ei
Se programeaza Pr 0.40 = 2 ( Autoreglare)
o Se tine apasat butonul SUS sau JOS din statia de urgenta , acest motor se roteste la viteza nominala ( va dura cel putin 1-2 minute )
5.Se programeaza Pr 0.00 = 1000 + se apasa tasta M + se apasa tasta rosie ( Salvarea parametrilor ) .
6.Se pune varful releului in pozitia sa normala .
7.Se fixeaza intrerupatorul statiei de urgenta in pozitia
3.1.2.Masini sincrone
In sistemulde reglare al lifturilor sincrone ( M33 si M33_Ext) , spre deosebire
de lifturile sincrone , este necesarar reglarea pozitiei codificatorului (Pr 0.43) in inversor pentru a uni codificatorul cu rotorul motorului . Reglarea este realizatat pentru fiecare lift in timpul autoreglarii in fabrica .
In aceste cazuri valorile caracteristice ale parametrilor sunt deasemenea repetitive , cu exceptia celor pentru codificator (Pr 0.43) care sunt diferite pentru fiecare lift si care pot fi aflate doar pentru autoreglare .
In urmatorul tabel sunt prezentate valorile caracteristice pentru fiecare lift si apoi procesul de autoreglare .
3.1.2.1.Tabelul de valori al M33 si M33_Extins
|
Unidrive_SP |
||||
|
Amp(A) |
Speed (rpm) |
R(ohm) |
L(mH) |
|
|
4-6p 1m | ||||
|
4-6p 1,6m | ||||
|
8p 1m | ||||
|
8p 1,6m | ||||
|
10-13p 1m | ||||
|
10-13p 1,6m | ||||
|
16p 1m | ||||
|
16p 1,6m | ||||
|
21p 1m | ||||
|
21p 1,6m | ||||
3.1.2.2.Codificatorul absolut
|
|
|
SICK-STEGMANN SRS 50
|
Parametri |
Valoarea |
|
|
Tipul codificatorului |
Pr 3.38 |
SC.HiPEr (7) pentru un codificator cu comunicatie seriala Hiperface |
|
Alimentarea cu voltaj a codificatorului |
Pr 3.36 |
8V (1) |
|
Autocinfigurarea codificatorului dispozitivului |
Pr 3.41 |
Setand la 1 se seteaza automat urmatorii parametri: Pr 3.33 Codificatorul intoarce bitii Pr 3.34 Numarul de linii per rotire a codificatorului(doar SC.HiPEr and SC.EndAt) Pr 3.35 Codificatorul porneste rezolutia Alternativ acesti parametri pot fi introdusi manual . |
|
Nivelul de detectie a erorii a codificatorului |
Pr 3.40 |
1 = Detectarea ruperii cablului cu A, B si Z activati. |
3.1.1.3.Procesul de autoreglare "Motor sincron"
Nu este necesara cand inversorul a fost schimbat
In cazul in care trebuie schimbat inversorul , nu este necesara realizarea autoreglarii . In SMARTCARDUL inserat in fiecare inversor sunt stocati toti parametrii originali . Este suficienta descarcarea datelor stocare in inversor .
Procesul de descarcare este detaliat in capitolul 2.8.-Citirea si stocarea datelor in SMARTCARD .
Auroreglarea trebuie realizatat in urmatoarele cazuri
Cand codificatorul a fost schimbat sau a fost atins ( de exemplu daca ati indepartat capacul codificatorului )
Cand motorul a fost schimbat si valoarea lui Pr 0.43 nu este cunoscuta .
Pasii care trebuie urmati sunt urmatorii :
8.Se incarca jumatate din cabina si se cboara cabina pana la mijlocul putului (acest pas nu este necesar daca autoreglarea este realizata fara cabluri de tractiune )
9.Se blocheaza usile ( daca s-a realizat cu cabluri) si se fixeaza pozitia "INSP" pe statia de urgenta .
10.Se urmaresc acesti parametri ai inversorului :
o Pr 0.07,Pr 0.08 si Pr 0.09 ( Controller-ul de viteza ) .
o Pr 0.38 si Pr 0.39 ( Bucla curenta)
o Pr 0.43 ( Unghiul de faza al codificatorului )
11.Se programeaza Pr 0.40 = 2 ( Autoreglare) + se apasa tasta M .
Se tina apasat butonul SUS sau JOS din statia de urgenta , motorul se roteste o data sau de doua ori .
o Daca torul merge bine , apare "rdy" .Apoi se elibereaza butonul.
12.Se seteaza parametri la valorile lor originale .
o Pr 0.007 ,Pr 0.08 si Pr 0.09 ( Controllerul de viteza ) ( probabil nu s-a schimbat ) .
o Pr 0.38 si Pr 0.39 ( Bucla curenta ) ( posibil sa se schimbe )
13.Se programeaza Pr 0.00 = 1000 + se apasa tasta M + se apasa tasta rosie ( salvarea parametrilor )
14.Se
deblocheaza usile ( daca s-a realizat cu
cabluri ) si se pune liftul in pozitia "
15.Se contacteaza departamentul tehnic al ORONA pentru a se afla cat este noul unghi de faza al noului codificator (Pr 0.43)
3.2.DIRECTIA ROTIRII CODIFICATORULUI
In functie de de pozitia liftului in put , este necesara schimbarea directiei de
rotatie a liftului pentru a permite miscarea corecta a liftului .
Aceasta modificare este relevanta doar pentru lifturile M33 si M33_Extinse
deoarece pozitia scripetelui de tractare este intotdeauna orientat inspre usi .
3.2.1.Masini M322
In aceste cazuri nu exista nici un motiv pentru a se modifica valoarea standard
decat daca trebuie efectuat vreun test .
|
M322 |
|||
|
Parametru |
Corect |
Invers |
Comentariu |
|
PORNIT |
OPRIT |
Directia de rotatie |
|
|
Rezultat |
Semnal sus = Liftul urca |
Semnal sus = Liftul coboara | |
3.2.2.Masini M33
In aceste cazuri , pe langa semnalele de viteza , exista parametri de compensare a greutatii care trebuie schimbati daca se schimba pozitia liftului . Semnul acestor parametri este diferit daca liftul este in dreapta sau in stanga .
|
M33 |
|||
|
Pozitia liftului in put | |||
|
Parametrul |
Stanga |
Dreapta |
Comentariu |
|
Urca |
|||
|
PORNIT |
OPRIT |
± Insemnele sistemului de greutate |
|
|
Coboara |
|||
|
|
|
|
|
|
Rezultat |
Urcare = Rotire stanga |
Urcare = Rotire dreapta | |
3.2.3.M33_Extinse
In aceste cazuri , pe langa semnalele de viteza , exista parametri de compensare a greutatii care trebuie schimbati daca se schimba pozitia liftului . Semnul acestor parametri este diferit daca liftul este in dreapta sau in stanga .
|
M33_Extins |
|||
|
Parametrul |
Stanga |
Dreapta |
Comentariu |
|
ON |
OFF |
± Insemnele sistemului de greutate |
|
|
ON |
OFF |
Coboara |
|
|
|
|
|
|
|
Rezultat |
Urcare = Rotire stanga |
Urcare = Rotire dreapta | |
3.3.GENERAREA PROFILELOR(VITEZA ,ACCELERATIE SI CURBE IN S)
3.3.1.Referinta de viteza
Viteza cabinei este determinata de catre viteza de rotatie a liftului , fiind proportionala cu frecventa de iesire a inversorului . Pentru a se atinge diferite nivele de viteza , inversorul este configurat astfel incat se ocupa de semnale externe printr-un cod binar transmis prin trei semnale de la placa de baza ( PBCM) .
Pentru a se configura insemnele de provenienta , trebuie configurati urmatorii parametri :
|
Parametri |
||
|
Maximum reference clamp |
Fixed the maximal turn speed |
|
|
Reference select |
0.05 =Pr |
Select the provenance of the speed references |
|
Preset reference selector |
Select binary code inputs S7, S6 and S5 |
|
Si insemnele de viteza vor fi determinate in modul urmator :
Valorile fixate din fabrica pentru fiecare lift sunt urmatoarele :
Viteza maxima (Vmax ) este intotdeauna limitata de catre parametrul Pr 0.02(Vlim).
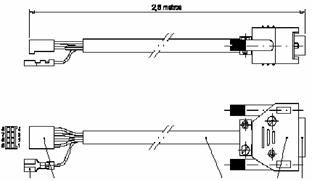
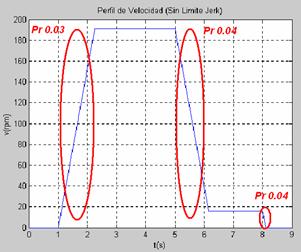
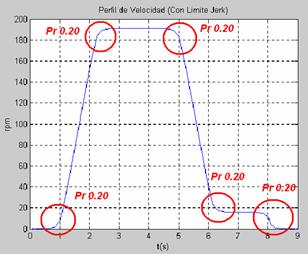
3.3.2.Reglarea profilului de viteza
Comfortul unui lift este in stransa legatura cu valorile de acceleratie ale instalatiei . Trebuie reglat profilul curbei luandu-se in considerare urmatoarele lucruri :
-Acceleratia/deceleratia maximala trebuie sa fie 0.9 m/s2.
-Deplasarea maximala este 4 m/s3.
-Distanta de decelerare trebuie sa fie suficienta pentru o oprire corecta , dar daca este prea lunga liftul va functiona prea mult timp la viteza redusa /.Acesti parametri se gasesc in meniul 5.4.3.1-Dec.Dist al terminalului de intretinere Arca II .
-Distanta lunga ; inseamna prea mult timp in Vaprox ( se arata viteza )
-Distanta scurta ;liftul nu poate opri la nivelul de oprire si (se opreste cu ajutorul contactorului si se simte o oprire abrupta )
-Distanta corecta ; este atunci cand liftul se opreste la viteza Vaprox si oprirea este simtita doar cateva secunde .
Nota:In meniul 5.4.3.1.-Dec.Dist din terminalul de intretinere al ARCA II fiecare parametru activate trebuie schimbat * pentru o instalatie de 1,6 m/s ,viteza V1 este deasemenea activat ).
Inversorul regleaza acceleratia , deceleratia si fluctuatiile la inceperea accelerarii
pentru a se atinge nivele optime de comfort prin intermediul urmatorilor parametri :
|
Parametri |
M33 |
M33_Extins |
M322_4poli |
M322_6poli |
|
|
Rampa de accelerare |
7.480 (0.7 m/s2) |
5.980 (0.7 m/s2) |
0.833 (0.8 m/s2) |
1.250 (0.8 m/s2) |
|
|
Rampa de decelerare |
7.480 (0.7 m/s2) |
5.980 (0.7 m/s2) |
0.833 (0.8 m/s2) |
(0.8 m/s2) |
|
|
Limita de fluctuatie |
380.000 (2.0 m/s3) |
2.094 (2.0 m/s3) |
0.667 (1.0 m/s3) |
1.000 (1.0 m/s3) |
Influenta fiecarui parametru este aratata de urmatoarele grafice :
|
|
|
Atat valorile cat si limitele depind de fiecare tip de lift . Parametri sunt prezentati
in urmatorul tabel :
3.3.2.1 Intervalul de valori pentru accelerare si decelerare
|
Accelerare si Decelerare |
||||
|
Intervalul de valori (m/s2) |
M33 |
M33_Extins |
M322 4poli |
M322 6poli |
3.3.2.2 Intervalul de valori pentru fluctuatie
|
FLUCTUATIE |
||||
|
Intervalul de valori (m/s3) |
M33 |
M33_Extins |
M322 4poli |
M322 6poli |
|
Nota : Cand se modifica parametri de decelerare , poate fi necesara reglarea distantei de decelerare . Va fi necesara consultarea meniului 5.4.3.2. al Terminalului de intretinere si modificarea parametrilor necesari pentru a regla punctul de schimbare a vitezei pentru fiecare nivel de viteza . 'Dist_S_vinsp' , fixarea distantei de decelerare pentru schimbarea de la viteza de inspectie la viteza aproximativa in directia sus . 'Dist_B_vinsp' , fixarea distantei de decelerare pentru schimbarea de la viteza de inspectie la viteza aproximativa in directia jos . 'Dist_S_V1' , fixarea distantei de decelerare pentru schimbarea vitezei de la nivelul de viteza 1 la viteza aproximativa in ambele directii . 'Dist_S_V2' , fixarea distantei de decelerare pentru schimbarea vitezei de la nivelul de viteza 2 la viteza aproximativa in ambele directii . 'Dist_S_V3' , fixarea distantei de decelerare pentru schimbarea vitezei de la nivelul de viteza 3 la viteza aproximativa in ambele directii . 'Dist_S_Vmax' , fixarea distantei de decelerare pentru schimbarea vitezei de la viteza maximala la viteza aproximativa in directia sus . 'Dist_B_Vmax' , fixarea distantei de decelerare pentru schimbarea vitezei de la viteza maximala la viteza aproximativa in directia jos . |
3.4.GRAFICE ALE SECVENTELOR DE MISCARE
3.4.1.Secventa generala
3.4.2.Secventa de miscare pemtru M33
In acest capitol vor fi analizate separat secventele de pornire si de franare .
3.4.2.1.Secventa de pornire pentru M33
|
|
"t fr" este timpul de deschidere a franei comandata de inversor , dupa care este permisa citirea insemneleo de viteza CV . |
|
Detalle de secuencia de señales en el inicio (CQ = compensación de carga , RTF rele de freno que activa el variador) |
|
3.4.2.2.Secventa de franare pentru M33
|
Parametri |
M33 |
Unitati |
|
|
Pr 0.23 |
Timpul de intarziere pentru inchiderea franei |
Sec |
|
|
Nota: Programarea timpului de intarziere pentru dezactivarea contactorului . |
Sec |
||
Este necesara sincronizarea momentului de oprire electrica cu activarea franei electromagnetice pentru a bloca axa motorului . Scopul este ca axa rotorului sa nu se miste cand frana este activata. Pentru a realiza acest lucru :
Timpul de intarziere pentru activarea franei (T1) , controlat de catre inversor ( pr 0.23 = 0,7-1 sec )
Timpul de intarziere pentru dezactivarea contactorului (T2) care poate fi programat din meniul 5.3.3 al Terminalului de intretinere , parametrul 'Contac.Drop' ( In mod normal intre 0,9 si 1,2 sec ) .
Nota : T2 trebuie sa fie mai lung decat T1 ( T2>T1) , deoarece altfel poate exista o fluctuatie la oprire .
3.4.3.Secventa de miscare pentru M322 si M33_Extins
Aceste instalatii au un program PLC , in care a fost implementata o noua secventa de functionare (pornire si oprire ) care imbunatateste cateva defecte ale secventei originale .
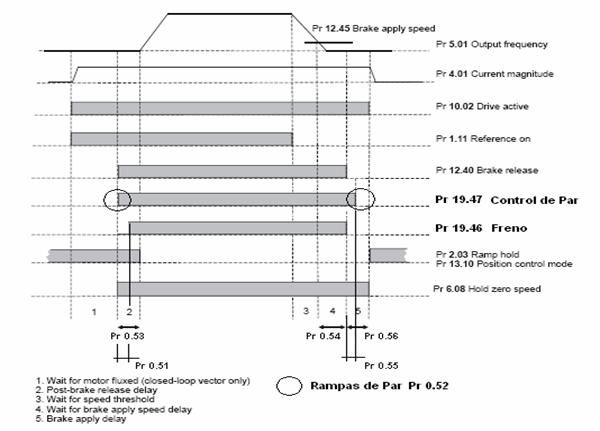
1.Acest pas se poate aplica doar lifturilor M3322 , deoarece este timpul necesar energizarii motorului.
2.In acest punct cuplul de torsiune de referinta ( curentul ) este introdus ca o rampa Pr 0.52 (timpul rampei) si dupa intarzierea Pr 0.51 ( timpul necesar pentru a se atinge cuplul de torsiune de referinta ) este activata comanda de deschidere a franei . In functie de viteza d e deschidere a franei , parametrul Pr 0.53 este reglat ( =Pr 0.51+intarzierea deschiderii franei ) . Odata ce acest timp a trecut , daca inversorul primeste semnalele de directie si viteza liftul porneste .
3.In acest punct liftul decelereaza pana cand atinge viteza de aplicare a franei .
4.In acest pas se asteapta intarzierea in aplicarea franei Pr0.54.
5.Odata ce semnalul de deschidere a franei a fost dezactivat exista o intarziere Pr 0.55 ( intarzierea de inchidere mecanica a franei ) inaintea indepartarii cuplului de torsiune intr-o rampa ( timpul rampei ) . Secventa se termina odata ce a trecut timpul Pr 0.56 Pr 0.55+Pr 0.52 ) .
Parametri programati din fabrica pentru fiecare tip de instalatie sunt urmatorii :
|
Parametri |
M33_Ext |
M322 |
Unitati |
|
|
Pr 0.51 |
Intarzierea deschiderii franei |
msec |
||
|
Pr 0.52 |
Timpul rampei cuplului de torsiune |
Sec |
||
|
Pr 0.53 |
Intarzierea de dupa eliberearea franei . |
Sec |
||
|
Pr 0.54 |
Intarzierea aplicarii franei |
Sec |
||
|
Pr 0.55 |
Intarzierea semnalului cuplului de torsiune |
msec |
||
|
Pr 0.56 |
Intarzierea dezactivarii inversorului |
Sec |
||
|
Pr 0.57 |
Controlul pozitiei |
Oprit |
Pornit |
Pornit/Oprit |
|
Pr 0.58 |
Limita cuplului de torsiune normal | |||
|
Pr 0.59 |
Limita cuplului de torsiune de salvare | |||
|
Nota: Programarea timpului de intarziere pentru dezactivarea contactorului . |
sec |
|||
In acel tabel putem vedea ca in instalatiile M322 nu este aplicat cuplul de torsiune (0.52 = 0 Acest lucru se datoreaza faptului ca curentul nominal utilizat in acest tip de lifturi nu este atat de ridicat ca cel utilizat in liftul M33_Extins . Acest parametru este utilizat in M33_Extins pentru indepartarea zgomotului produs de pasii curentului principal care apare daca nu se introduce progresiv curentul .
3.5.COMPENSAREA INCARCATURII(M33 si M33_Ext)
Instalatiile M33 si M33_Extins au un sistem de greutate , sau un instrument care citeste incarcatura cabinei , care transmite un semnal analogic catre inversor . Acest semnal este utilizat pentru realizarea compensatiei in timpul pornirii liftului .
Transmisia acestor lifturi catre cabina este directa , fara reducere . In momentul pornirii , cand frana este deschisa ( activarea RTF-ului ) liftul tinde sa se miste intr-o parte datorita compensarii incarcaturii .
Acest sistem masoara balansarea liftului , si utilizeaza aceasta valoare pentru a mentine liftul nemiscat in momentul in care frana atinge scripetele si miscarea incepe .
3.5.1.Parametri compensarii incarcaturii
|
Parametru |
Concept |
|
Pr. 0.24 |
Cererea cuplului de torsiune( Doar pentru citire ) |
|
Pr. 0.25 |
Semnalul sistemului de greutate ( 0-20 mA) , setat in Orona ( Doar pentru citire ) |
|
Pr. 0.26 |
Factorul de compensare din sistemul de greutate setat in Orona |
|
Pr. 0.27 |
Semnalul analogic pentru sistemul de greutate |
3.5.1.1.Factorul de compensare al dispozitivului de greutate Pr 0.26 .
Prin intermediul acestui parametru cuplul de torsiune necesar este reglat pentru a se evita miscarea liftului cu cabina goala ( dispozitivul de greutate nu are nici un efect deoarece in acesta situatie semnalul analogic Pr 0.25 este aproximativ 0 .
Desi acest parametru este programat din fabrica , daca exista o reducere , acest parametru trebuie verificat sau recalculat dupa cum se explica :
1.Se blocheaza usile si se trece liftul in modul de urgenta prin intermediul cutiei de inspectie din controller .
2.Se trece viteza de inspectie Pr 0.17 = 0 +se apasa M
3.Se apasa butonul pentru urcare sau cel pentru coborare din cutia de inspectie si se citeste valoarea lui Pr 0.24 cand viteza este stabila la 0 .
4.Valoarea citita in parametrul Pr 0.24 este cel care trebuie programat in Pr 0.26 (trebuie sa fie aproximatic cel definit in fabrica ) Daca nu este pozibil sa nu se efectueze echilibrarea .
5.Se trece la viteza de inspectie Pr 0.17 valoarea sa originala .
6.Se introduce Pr 0.00 = 1000 +se apasa M + se apasa tasta rosie (Pastrarea parametrilor ) .
7.Se deblocheaza usile si se trece liftul in modul normal .
3.5.1.2 Divizarea semnalului analogic a sistemului de greutate Pr
Acest parametru trebuie sa fie programat din fabrica . Este in relatie directa cu liftul asamblat .
3.5.2.Valori din fabrica
|
M33 si M33_Extins |
|||
|
Locatia liftului in put | |||
|
Parametru |
Stanga |
Dreapta |
Comentariu |
|
PORNIT |
OPRIT |
Semnul sistemului de greutate |
|
|
|
|
|
|
|
Rezultat |
Urcare = Rotire stanga |
Urcare = Rotire dreapta | |
|
Sistemul de greutate |
|||
|
Greutate (Kilogram) |
OffSet Pr 0.26 |
Panta Pr 0.27 |
|
|
4/6p 1m | |||
|
4/6p 1,6m | |||
|
8p 1m | |||
|
8p 1,6m | |||
|
10/13p 1m | |||
|
10/13p 1,6m | |||
|
16p 1m | |||
|
16p 1,6m | |||
|
21p 1m | |||
|
21p 1,6m | |||
3.6.FUNCTIONAREA IN MODUL DE SALVARE ( M22 SI M33_Extins)
3.6.1.Schema sistemului de salvare
3.6.2.Parametri salvarii
|
Salvare |
||
|
Parametru |
Concept |
Valoarea semnalului |
|
Intrarea de salvare (Terminal 26) |
Pornit/Oprit |
|
|
Directia favorabila a salvarii |
Pornit/Oprit |
|
|
Limita cuplului de torsiune al salvarii | ||
3.6.2.1.Directia favorabila a salvarii Pr 0.34
Acest parametru depinde de specificatiile clientului . Dar este important sa va amintiti ca daca liftul nu realizeaza salvarea in directia favorabila este necesar un UPS capabil sa suporte incarcatura liftului .Daca nu se ia in considerare acest lucru , UPS se va opri singur si salvarea nu se va realiza .
3.6.2.2.Limita cuplului de torsiune al salvarii Pr 0.59
Este metoda de limitare a alimentarii necesare UPS-ului . In acest fel se evita ca UPS-ul sa se opreasca singur datorita consumului in exces .
4.PARAMETRI DE BAZA (MENIUL 0)
4.1.PARAMETRII M322
In continuare este prezentat meniul parametrilor utili pentru aplicatie . Utilizatorul
are acces doar la parametri si variabilele din acest meniu .
|
Meniu 0 |
Concept |
Standard |
Valoare |
Parametru |
|
Salvarea parametrilor | ||||
|
Referinta minima a clamei | ||||
|
Referinta maxima a clamei | ||||
|
Rata de accelerare | ||||
|
Rata de decelerare | ||||
|
Selectarea referintei |
A1.A2 |
Pr | ||
|
Limita curenta |
Citire | |||
|
Castigul P al controllerului de viteza | ||||
|
Castigul I al controllerului de viteza | ||||
|
Castigul D al controllerului de viteza | ||||
|
Viteza motorului |
Citire | |||
|
Viteza de referinta |
Citire | |||
|
Curentul total al motorului |
Citire | |||
|
Voltajul magistralei DC |
Citire | |||
|
Nivelul de viteza |
Citire | |||
|
Viteza de echilibrare | ||||
|
Viteza aproximativa | ||||
|
Viteza de inspectie | ||||
|
Viteza 1 | ||||
|
Viteza maxima | ||||
|
Limita de fluctuatie | ||||
|
Directia salvarii |
Citire | |||
|
Eliberarea franei |
Citire | |||
|
Intrarea salvarii |
Citire | |||
|
Comanda cuplului de torsiune |
Citire | |||
|
Semnalul sistemului de greutate |
Citire | |||
|
Factorul de compensare al sistemului de greutate | ||||
|
Semnalul analogic al sistemului de greutate | ||||
|
Filtrul de viteza | ||||
|
Activarea dispozitivului |
Citire | |||
|
SMARTCARD |
Nimic |
Nimic | ||
|
Voltajul estimat al dispozitivului |
Citire | |||
|
Curentul estimat al dispozitivului |
Citire | |||
|
Directia de rotatie |
Oprit |
Pornit | ||
|
Directia favorabila de salvare |
Oprit |
Pornit | ||
|
Modul de comunicatie seriala |
rtu |
rtu | ||
|
Rata comunicatiei seriale | ||||
|
Adresa comunicatiei seriale | ||||
|
Castigul buclei P | ||||
|
Castigul buclei I | ||||
|
Autoreglare | ||||
|
Frecventa maxima de intrerupere | ||||
|
Nici unul din polii motorului |
Auto |
4 poli | ||
|
Factorul de putere | ||||
|
Voltajul estimat al motorului | ||||
|
| ||||
|
Curentul estimat al motorului | ||||
|
Frecventa estimata | ||||
|
Selectorul modului de operare |
CL VECt |
CL VECt | ||
|
Starea de securitate |
L1 |
L2 | ||
|
Versiunea de software |
Citire | |||
|
Intarzierea deschiderii franei | ||||
|
Timpul rampei cuplului de torsiune | ||||
|
Intarzierea eliberarii dupa franare | ||||
|
Intarzierea aplicarii franei | ||||
|
Intarzierea semnalului cuplului de torsiune | ||||
|
Intarzierea dezactivarii inversorului | ||||
|
Controlul pozitiei |
Oprit |
Pornit | ||
|
Limita cuplului de torsiune normal | ||||
|
Limita cuplului de torsiune de salvare | ||||
4.2.PARAMETRII M33
In continuare este prezentat meniul parametrilor utili aplicatiei . Utilizatorul are acces doar la parametri si variabilele acestui meniu .
|
Meniu 0 |
Concept |
Standard |
Valoare |
Parametru |
|
Salvarea parametrilor | ||||
|
Referinta minima a clamei | ||||
|
Referinta maxima a clamei | ||||
|
Rata de accelerare | ||||
|
Rata de decelerare | ||||
|
Selectarea referintei |
A1.A2 |
Pr | ||
|
Limita curenta | ||||
|
Castigul P al controllerului de viteza | ||||
|
Castigul I al controllerului de viteza | ||||
|
Castigul D al controllerului de viteza | ||||
|
Viteza motorului |
Citire | |||
|
Viteza de referinta |
Citire | |||
|
Curentul total al motorului |
Citire | |||
|
Voltajul magistralei DC |
Citire | |||
|
Nivelul de viteza |
Citire | |||
|
Viteza de echilibrare | ||||
|
Viteza aproximativa | ||||
|
Viteza de inspectie | ||||
|
Viteza 1 | ||||
|
Viteza maxima | ||||
|
Limita de fluctuatie | ||||
|
Directia salvarii |
Citire | |||
|
Eliberarea franei |
Citire | |||
|
Intrarea salvarii | ||||
|
Comanda cuplului de torsiune |
Lectura | |||
|
Semnalul sistemului de greutate |
Lectura | |||
|
Factorul de compensare al sistemului de greutate | ||||
|
Semnalul analogic al sistemului de greutate | ||||
|
Filtrul de viteza | ||||
|
Activarea dispozitivului |
Citire | |||
|
SMARTCARD |
Nimic |
Nimic | ||
|
Voltajul estimat al dispozitivului |
Citire | |||
|
Curentul estimat al dispozitivului |
Citire | |||
|
Directia de rotatie | ||||
|
Codul de securitate al utilizatorului | ||||
|
Modul de comunicatie seriala |
rtu |
rtu | ||
|
Rata comunicatiei seriale | ||||
|
Adresa comunicatiei seriale | ||||
|
Castigul buclei P | ||||
|
Castigul buclei I | ||||
|
Autoreglare | ||||
|
Frecventa maxima de intrerupere | ||||
|
Nici unul din polii motorului |
6 pole |
12 pole | ||
|
Factorul de putere | ||||
|
Voltajul estimat al motorului | ||||
|
| ||||
|
Curentul estimat al motorului | ||||
|
Selectorul modului de operare |
SErVO |
SErVO | ||
|
Starea de securitate |
L1 |
L1 | ||
|
Versiunea de software |
Citire | |||
4.3.PARAMETRI M33_Extins
|
Meniu 0 |
Concept |
Standard |
Valoare |
Parametru |
|
Salvarea parametrilor | ||||
|
Referinta minima a clamei | ||||
|
Referinta maxima a clamei | ||||
|
Rata de accelerare | ||||
|
Rata de decelerare | ||||
|
Selectarea referintei |
A1.A2 |
Pr | ||
|
Limita curenta |
Citire | |||
|
Castigul P al controllerului de viteza | ||||
|
Castigul I al controllerului de viteza | ||||
|
Castigul D al controllerului de viteza | ||||
|
Viteza motorului |
Citire | |||
|
Viteza de referinta |
Citire | |||
|
Curentul total al motorului |
Citire | |||
|
Voltajul magistralei DC |
Citire | |||
|
Nivelul de viteza |
Citire | |||
|
Viteza de echilibrare | ||||
|
Viteza aproximativa | ||||
|
Viteza de inspectie | ||||
|
Viteza 1 | ||||
|
Viteza maxima | ||||
|
Limita de fluctuatie | ||||
|
Directia salvarii |
Citire | |||
|
Eliberarea franei |
Citire | |||
|
Intrarea salvarii |
Citire | |||
|
Comanda cuplului de torsiune |
Citire | |||
|
Semnalul sistemului de greutate |
Citire | |||
|
Factorul de compensare al sistemului de greutate | ||||
|
Semnalul analogic al sistemului de greutate | ||||
|
Filtrul de viteza | ||||
|
Activarea dispozitivului |
Citire |
Citire |
||
|
SMARTCARD |
Nimic |
Nimic | ||
|
Voltajul estimat al dispozitivului |
Citire |
Citire |
||
|
Curentul estimat al dispozitivului |
Citire |
Citire |
||
|
Directia de rotatie |
Oprit |
Pornit | ||
|
Codul de securitate al utilizatorului |
Oprit |
Pornit | ||
|
Modul de comunicatie seriala |
rtu |
rtu | ||
|
Rata comunicatiei seriale | ||||
|
Adresa comunicatiei seriale | ||||
|
Castigul buclei P | ||||
|
Castigul buclei I | ||||
|
Autoreglare | ||||
|
Frecventa maxima de intrerupere | ||||
|
Nici unul din polii motorului |
6 pole |
12 pole | ||
|
Factorul de putere | ||||
|
Voltajul estimat al motorului | ||||
|
| ||||
|
Curentul estimat al motorului | ||||
|
Selectorul modului de operare |
SErVO |
SErVO | ||
|
Starea de securitate |
L1 |
L1 | ||
|
Versiunea de software |
Citire | |||
|
Intarzierea deschiderii franei | ||||
|
Timpul rampei cuplului de torsiune | ||||
|
Intarzierea eliberarii dupa franare | ||||
|
Intarzierea aplicarii franei | ||||
|
Intarzierea semnalului cuplului de torsiune | ||||
|
Intarzierea dezactivarii inversorului | ||||
|
Controlul pozitiei |
Oprit |
Pornit | ||
|
Limita cuplului de torsiune normal | ||||
|
Limita cuplului de torsiune de salvare | ||||
5.PARAMETRI INVERSORULUI
5.1.PROGRAMAREA "M322 11Kw_4polEs_PLC"
Parametri diferiti in comparatie cu acestia :
|
Parametri |
Descriere |
Standard |
Valori |
Unitate |
|
Referinta maxima a clamei |
RPM |
|||
|
Referinta selectorului |
A1.A2 |
Pr | ||
|
Referinta presetata 2 |
RPM |
|||
|
Referinta presetata 3 |
RPM |
|||
|
Referinta presetata 4 |
RPM |
|||
|
Referinta presetata 5 |
RPM |
|||
|
Referinta presetata 6 |
RPM |
|||
|
Referinta presetata 7 |
RPM |
|||
|
Referinta presetata 8 |
RPM |
|||
|
Asteptarea rampei |
Off |
On | ||
|
Modul de selectie al rampei |
Std |
FASt | ||
|
Activarea rampei S |
Oprit |
Pornit | ||
|
Limita de accelerare a rampei S |
s²/1000RPM |
|||
|
Selectorul ratei de accelerare | ||||
|
Rata de accelerare 1 |
s/1000 RPM |
|||
|
Rata de accelerare 2 |
s/1000 RPM |
|||
|
Rata de accelerare 3 |
s/1000 RPM |
|||
|
Rata de accelerare 4 |
s/1000 RPM |
|||
|
Rata de accelerare 5 |
s/1000 RPM |
|||
|
Rata de accelerare 6 |
s/1000 RPM |
|||
|
Rata de accelerare 7 |
s/1000 RPM |
|||
|
Rata de accelerare 8 |
s/1000 RPM |
|||
|
Rata de decelerare a selectorului | ||||
|
Rata de decelerare 1 |
s/1000 RPM |
|||
|
Rata de decelerare 2 |
s/1000 RPM |
|||
|
Rata de decelerare 3 |
s/1000 RPM |
|||
|
Rata de decelerare 4 |
s/1000 RPM |
|||
|
02.25 |
Rata de decelerare 5 |
2.000 |
0.000 |
s/1000 RPM |
|
02.26 |
Rata de decelerare 6 |
2.000 |
0.000 |
s/1000 RPM |
|
02.27 |
Rata de decelerare 7 |
2.000 |
0.000 |
s/1000 RPM |
|
02.28 |
Rata de decelerare 8 |
2.000 |
0.000 |
s/1000 RPM |
|
03.09 |
Detectarea la viteza absoluta |
Oprit |
Pornit | |
|
03.10 |
Castigul proportional al controllerului de viteza(Kp1) |
0.1200 |
1/rad s-1 |
|
|
03.11 |
Castigul integral al controllerului de viteza (Ki1) |
0.10 |
1/rad |
|
|
03.23 |
Selectorul vitezei de referinta |
0 |
1 | |
|
03.32 |
Semnul codificatorului dispozitivului |
Oprit |
Pornit | |
|
03.36 |
Sursa de voltaj a codificatorului dispozitivului |
5V |
15V | |
|
03.42 |
Filtrul codificatorului dispozitivului |
0 |
1 |
ms |
|
03.43 |
Referinta maxima a codificatorului dispozitivului |
1500 |
12000 |
RPM |
|
04.05 |
Limita de current a motorizarii |
175.0 |
186.7 |
% |
|
04.06 |
Limita de curent a regenerarii |
175.0 |
186.7 |
% |
|
04.07 |
Limita de curent simetric |
175.0 |
0.0 |
% |
|
04.12 |
Filtrul 1 de cerere de current |
0.0 |
2.0 |
ms |
|
04.13 |
Castigul Kp a controllerului de curent |
150 |
103 | |
|
04.14 |
Castigul Ki a controllerului de curent |
2000 |
422 | |
|
05.07 |
Curentul estimat al motorului |
0.00 |
23.20 |
A |
|
05.08 |
Incarcatura estimata /viteza estmata |
1440.00 |
RPM |
|
|
05.09 |
Voltajul estimat |
400 |
380 |
V |
|
05.10 |
Factorul de putere estimat |
0.850 |
0.855 | |
|
05.11 |
Numarul de poli ai motorului |
Auto |
4 pole | |
|
05.17 |
Rezistenta statorului |
0.000 |
0.371 |
Ohm |
|
05.18 |
Frecventa maxima de intrerupere |
3 |
8 |
kHz |
|
05.24 |
Inductanta transienta (sLs) |
0.000 |
3.868 |
mH |
|
05.25 |
Inductanta statorului (Ls) |
0.00 |
66.67 |
mH |
|
05.29 |
Punctul de intrerupere 1 al saturatiei motorului |
50 |
56 |
% |
|
05.30 |
Punctul de intrerupere 2 al saturatiei motorului |
75 |
85 |
% |
|
06.21 |
Timpul de alimentare : ore , minute |
0.10 |
hh.mm |
|
|
06.48 |
Pierderile principale in timpul calatoriei prin nivelul de detectare |
0 | ||
|
07.10 |
Destinatia intrarii 1 analogine T5/6 |
1.36 |
18.41 | |
|
07.11 |
Modul intrarii 2 analogice T7 |
Volt |
0-20 | |
|
07.13 |
Inversorul intrarii 2 analogice T7 |
Oprit |
Pornit | |
|
07.14 |
Destinatia intrarii 2 analogice T7 |
1.37 |
18.13 | |
|
07.15 |
Modul intrarii 3 analogice T8 |
th |
Volt | |
|
07.18 |
Destinatia intrarii 3 analogice T8 |
0.00 |
18.42 | |
|
07.19 |
Sursa iesirii 1 analogice T8 |
3.02 |
3.01 | |
|
07.22 |
Sursa iesirii 2 analogice T10 |
4.02 |
3.02 | |
|
08.21 |
Sursa/destinatia I/O 1 digitale T24 |
19.46 | ||
|
08.22 |
Sursa/destinatia I/O 2 digitale T25 |
10.07 | ||
|
08.23 |
Sursa/destinatia I/O 3 digitale T26 |
0.00 | ||
|
08.24 |
Destinatia intrarii 4 digitale T27 |
6.32 |
1.45 | |
|
08.25 |
Destinatia intrarii 5 digitale T28 |
1.41 |
1.46 | |
|
08.26 |
Destinatia intrarii 6 digitale T29 |
6.31 |
1.47 | |
|
08.32 |
Selectia iesirii I/O 2 digitale T29 |
Oprit |
Pornit | |
|
08.39 |
Dezactivarea autoselectiei intrarii digitale T28&T29 |
Oprit |
Pornit | |
|
10.30 |
Timpul franarii complete |
0.02 |
2.00 |
s |
|
10.31 |
Perioada franarii complete |
2.0 |
10.0 |
s |
|
11.01 |
Parametrul 0.11 setat |
5.01 |
3.01 |
menu.param |
|
11.03 |
Parametrul 0.14 setat |
4.02 |
5.05 |
menu.param |
|
11.04 |
Parametrul 0.15 setat |
4.11 |
1.50 |
menu.param |
|
11.05 |
Parametrul 0.16 setat |
2.04 |
1.22 |
menu.param |
|
11.06 |
Parametrul 0.17 setat |
2.02 |
1.23 |
menu.param |
|
11.07 |
Parametrul 0.18 setat |
4.12 |
1.24 |
menu.param |
|
11.08 |
Parametrul 0.19 setat |
8.29 |
1.25 |
menu.param |
|
11.09 |
Parametrul 0.20 setat |
7.11 |
1.28 |
menu.param |
|
11.10 |
Parametrul 0.21 setat |
7.14 |
2.17 |
menu.param |
|
11.11 |
Parametrul 0.22 setat |
7.15 |
18.01 |
menu.param |
|
11.12 |
Parametrul 0.23 setat |
1.10 |
8.01 |
menu.param |
|
11.13 |
Parametrul 0.24 setat |
1.05 |
8.03 |
menu.param |
|
11.14 |
Parametrul 0.25 setat |
1.21 |
4.03 |
menu.param |
|
11.15 |
Parametrul 0.26 setat |
1.22 |
7.02 |
menu.param |
|
11.16 |
Parametrul 0.27 setat |
3.08 |
4.09 |
menu.param |
|
11.17 |
Parametrul 0.28 setat |
3.34 |
7.12 |
menu.param |
|
11.18 |
Parametrul 0.29 setat |
6.13 |
3.42 |
menu.param |
|
11.19 |
Parametrul 0.29 setat |
11.36 |
8.09 |
menu.param |
|
11.44 |
Starea de securitate |
L1 |
L2 | |
|
12.03 |
Sursa detectorului pragului 1 |
0.00 |
2.03 |
menu.param |
|
12.04 |
Nivelul detectorului pragului 1 |
0.00 |
50.00 |
% |
|
12.07 |
Destinatia detectorului pragului 1 |
0.00 |
12.10 |
menu.param |
|
12.08 |
Sursa 1 a selectorului variabilei 1 |
0.00 |
12.12 |
menu.param |
|
12.09 |
Sursa 2 a selectorului variabilei 1 |
0.00 |
4.03 |
menu.param |
|
12.29 |
Sursa 2 a selectorului variabilei 2 |
0.00 |
4.06 |
menu.param |
|
12.31 |
Destinatia selectorului variabilei 2 |
0.00 |
14.14 |
menu.param |
|
12.41 |
Activarea controllerului franei |
diS |
USEr | |
|
12.46 |
Intarzierea vitezei la aplicarea franei |
1.0 |
0.3 |
s |
|
12.47 |
Intarzierea vitezei dupa eliberarea franei |
1.0 |
0.5 |
s |
|
12.48 |
Intarzierea la aplicarea franei |
1.0 |
0.5 |
s |
|
12.49 |
Activarea pozitiei controllerului in timpul eliberarii franei |
1 | ||
|
13.04 |
Sursa de referinta a pozitiei controllerului |
Drive |
Local | |
|
13.09 |
Castigul P al pozitiei controllerului |
25.00 |
80.00 | |
|
13.10 |
Modul pozitiei controllerului |
0 |
1 | |
|
14.03 |
Sursa de referinta a PIDului |
0.00 |
14.14 |
menu.param |
|
14.08 |
Activarea PIDului |
Off |
On | |
|
14.11 |
Castigul I al PIDului |
0.500 |
0.000 | |
|
14.14 |
Limita inferioara a PIDului |
-100.00 |
0.00 |
% |
|
14.16 |
Destinatia iesirii PIDului |
0.00 |
4.07 |
menu.param |
|
14.18 |
Activarea limitei simetrice a PIDului |
Off |
On | |
|
18.11 |
Meniul 1 al aplicatiei de citire/scriere de intregi |
175 | ||
|
18.12 |
Meniul 1 al aplicatiei de citire/scriere de intregi |
60 | ||
|
18.15 |
Meniul 1 al aplicatiei de citire/scriere de intregi |
231 | ||
|
18.16 |
Meniul 1 al aplicatiei de citire/scriere de intregi |
175 | ||
|
18.17 |
Meniul 1 al aplicatiei de citire/scriere de intregi |
75 | ||
|
18.31 |
Meniul 1 al aplicatiei de citire/scriere de biti |
Oprit |
Pornit | |
|
18.35 |
Meniul 1 al aplicatiei de citire/scriere de biti |
Oprit |
Pornit | |
|
18.38 |
Meniul 1 al aplicatiei de citire/scriere de biti |
Oprit |
Pornit | |
|
18.40 |
Meniul 1 al aplicatiei de citire/scriere de biti |
Oprit |
Pornit | |
|
18.45 |
Meniul 1 al aplicatiei de citire/scriere de biti |
Oprit |
Pornit | |
|
19.11 |
Meniul 2 al aplicatiei de citire/scriere de intregi |
2000 | ||
|
19.13 |
Meniul 2 al aplicatiei de citire/scriere de intregi |
500 | ||
|
19.49 |
Meniul 2 al aplicatiei de citire/scriere de biti |
Oprit |
Pornit | |
|
22.03 |
Setarea parametrului 0.33 |
5.16 |
18.40 | |
|
22.04 |
Setarea parametrului 0.34 |
11.30 |
18.45 | |
|
22.21 |
Setarea parametrului 0.51 |
0.00 |
19.12 | |
|
22.22 |
Setarea parametrului 0.52 |
0.00 |
14.07 | |
|
22.23 |
Setarea parametrului 0.53 |
0.00 |
12.47 | |
|
22.24 |
Setarea parametrului 0.54 |
0.00 |
12.46 | |
|
22.25 |
Setarea parametrului 0.55 |
0.00 |
19.13 | |
|
22.26 |
Setarea parametrului 0.56 |
0.00 |
12.48 | |
|
22.27 |
Setarea parametrului 0.57 |
0.00 |
19.49 | |
|
22.28 |
Setarea parametrului 0.58 |
0.00 |
18.11 | |
|
22.29 |
Setarea parametrului 0.59 |
0.00 |
18.12 |
5.2.PROGRAMAREA "M33 V1.6_10-13p_Izq"(Stanga)
Parametri diferiti in comparatie cu cei standard :
|
Parámetri |
Descriere |
Defect |
Valori |
Unitati |
|
Referinta maxima a clamei |
RPM |
|||
|
Selectorul referintei |
A1.A2 |
Pr | ||
|
Referinta presetata 2 |
RPM |
|||
|
Referinta presetata 3 |
RPM |
|||
|
Referinta presetata 4 |
RPM |
|||
|
Referinta presetata 5 |
RPM |
|||
|
Referinta presetata 6 |
RPM |
|||
|
Referinta presetata 7 |
RPM |
|||
|
Referinta presetata 8 |
RPM |
|||
|
Modul de selectie al rampei |
Std |
FASt | ||
|
Activarea rampei S |
Oprit |
Pornit | ||
|
Limita de accelerare a rampei S |
s²/1000RPM |
|||
|
Selectorul ratei de accelerare | ||||
|
Rata de accelerare 1 |
s/1000 RPM |
|||
|
Rata de accelerare 2 |
s/1000 RPM |
|||
|
Rata de accelerare 3 |
s/1000 RPM |
|||
|
Rata de accelerare 4 |
s/1000 RPM |
|||
|
Rata de accelerare 5 |
s/1000 RPM |
|||
|
Rata de accelerare 6 |
s/1000 RPM |
|||
|
Rata de accelerare 7 |
s/1000 RPM |
|||
|
Rata de accelerare 8 |
s/1000 RPM |
|||
|
Rata de decelerare a selectorului | ||||
|
Rata de decelerare 1 |
s/1000 RPM |
|||
|
Rata de decelerare 2 |
s/1000 RPM |
|||
|
Rata de decelerare 3 |
s/1000 RPM |
|||
|
Rata de decelerare 4 |
s/1000 RPM |
|||
|
Rata de decelerare 5 |
s/1000 RPM |
|||
|
Rata de decelerare 6 |
s/1000 RPM |
|||
|
Rata de decelerare 7 |
s/1000 RPM |
|||
|
Rata de decelerare 8 |
s/1000 RPM |
|||
|
Pragul de viteza zero |
RPM |
|||
|
La limita inferioara de viteza |
RPM |
|||
|
La limita superioara de viteza |
RPM |
|||
|
Detectarea vitezei absolute |
Oprit |
Pornit | ||
|
Castigul proportional al controllerului de viteza(Kp1) |
1/rad s-1 |
|||
|
Castigul proportional al controllerului de viteza(Kp2) | ||||
|
Castigul integral al controllerului de viteza (Ki1) |
1/rad |
|||
|
Inertia motorului si a incarcaturii |
kg m² |
|||
|
Unghiul de faza al codificatorului | ||||
|
Bitii de rotire ai codificatorului dispozitivului | ||||
|
Liniile codificatorului dispozitivului per rotire | ||||
|
Rezolutia codificatorului dispozitivului la o singura rotire | ||||
|
Sursa de voltaj a codificatorului dispozitivului |
5V |
8V | ||
|
Tipul codificatorului dispozitivului |
Ab.Servo |
SC.Hiper | ||
|
Nivelul de detectie a erorii codificatorului dispozitivului | ||||
|
Autoconfigurarea codificatorului dispozitivului |
Oprit |
Pornit | ||
|
Filtrul codificatorului dispozitivului |
ms |
|||
|
Referinta maxima a codificatorului dispozitivului | ||||
|
Limita de current a motorizarii | ||||
|
Limita de curent a regenerarii | ||||
|
Referinta cuplului de torsiune | ||||
|
Offsetul cuplului de torsiune | ||||
|
Selectia offsetului cuplului de torsiune |
Off |
On | ||
|
Selectorul de mod al cuplului de torsiune |
Speed |
Feed fwd | ||
|
Castigul Kp a controllerului de curent | ||||
|
Castigul Ki a controllerului de curent | ||||
|
Scalarea maxima de curent a utilizatorului | ||||
|
Curentul estimat al motorului |
A |
|||
|
Incarcatura estimata /viteza estmata |
RPM |
|||
|
Voltajul estimat |
V |
|||
|
Numarul de poli ai motorului |
6 pole |
12 pole | ||
|
Rezistenta statorului |
Ohm |
|||
|
Frecventa maxima de intrerupere |
kHz |
|||
|
Inductanta transienta (sLs) |
mH |
|||
|
Cuplul de torsiune al motorului per amp.Kt |
Nm/A |
|||
|
Timpul de alimentare : ore , minute |
hh.mm |
|||
|
Destinatia intrarii 1 analogice T5/6 |
menu.param |
|||
|
Modul intrarii 2 analogice T7 |
Volt | |||
|
Scalarea intrarii 2 analogice T7 | ||||
|
Inversorul intrarii 2 analogice T7 |
Off |
On | ||
|
Destinatia intrarii 2 analogice T7 |
menu.param |
|||
|
Destinatia intrarii 3 analogice T8 |
menu.param |
|||
|
Sursa iesirii 2 analogice T10 |
menu.param |
|||
|
Sursa/destinatia I/O 1 digitale T24 |
menu.param |
|||
|
Sursa/destinatia I/O 2 digitale T25 |
menu.param |
|||
|
Sursa/destinatia I/O 3 digitale T26 |
menu.param |
|||
|
Destinatia intrarii 4 digitale T27 |
menu.param |
|||
|
Destinatia intrarii 5 digitale T28 |
menu.param |
|||
|
Destinatia intrarii 6 digitale T29 |
menu.param |
|||
|
Selectia iesirii I/O 2 digitale T25 |
Oprit |
Pornit | ||
|
Selectia iesirii I/O 3 digitale T25 |
Oprit |
Pornit | ||
|
Dezactivarea autoselectiei intrarii digitale T28&T29 |
Oprit |
Pornit | ||
|
Functia logica 1 sursa 1 |
menu.param |
|||
|
Functia logica 1 sursa 2 |
menu.param |
|||
|
Functia logica 1 sursa 2 inversa |
Off |
On | ||
|
Functia logica 1 intarziere |
s |
|||
|
Functia logica 2 sursa 1 |
menu.param |
|||
|
Functia logica 2 sursa 1 inversa |
Off |
On | ||
|
Functia logica 2 sursa 2 |
menu.param |
|||
|
Timpul franarii complete |
s |
|||
|
Perioada franarii complete |
s |
|||
|
Parametrul 0.11 setat |
menu.param |
|||
|
Parametrul 0.14 setat |
menu.param |
|||
|
Parametrul 0.15 setat |
menu.param |
|||
|
Parametrul 0.16 setat |
menu.param |
|||
|
Parametrul 0.17 setat |
menu.param |
|||
|
Parametrul 0.18 setat |
menu.param |
|||
|
Parametrul 0.19 setat |
menu.param |
|||
|
Parametrul 0.20 setat |
menu.param |
|||
|
Parametrul 0.21 setat |
menu.param |
|||
|
Parametrul 0.22 setat |
menu.param |
|||
|
Parametrul 0.23 setat |
menu.param |
|||
|
Parametrul 0.24 setat |
menu.param |
|||
|
Parametrul 0.25 setat |
menu.param |
|||
|
Parametrul 0.26 setat |
menu.param |
|||
|
Parametrul 0.27 setat |
menu.param |
|||
|
Parametrul 0.28 setat |
menu.param |
|||
|
Parametrul 0.29 setat |
menu.param |
|||
|
Parametrul 0.29 setat |
menu.param |
|||
|
Starea modului timeout |
s |
|||
|
Sursa detectorului de prag 1 |
menu.param |
|||
|
Nivelul detectorului de prag 1 | ||||
|
Sursa detectorului de prag 2 |
Oprit |
Pornit | ||
|
Nivelul detectorului de prag 2 |
menu.param |
|||
|
Destinatia detectorului de prag 2 | ||||
|
Sursa 1 a selectorului variabilei 2 |
menu.param |
|||
|
Sursa 2 a selectorului variabilei 2 |
menu.param |
|||
|
Destinatia selectorului variabilei 2 |
menu.param |
|||
|
Destinatia selectorului variabilei 2 |
menu.param |
|||
|
Sursa principala a referintei PID-ului |
menu.param |
|||
|
Sursa de referinta a PID-ului |
menu.param |
|||
|
Sursa de feedback a PID-ului |
menu.param |
|||
|
Sursa inversa a referintei PID-ului |
Oprit |
Pornit | ||
|
Limita estimata a sursei PID-ului |
s |
|||
|
Activarea PID-ului |
Off |
On | ||
|
Sursa optionala de activare a PID-ului |
menu.param |
|||
|
Castigul P al PID-ului | ||||
|
Castigul I al PID-ului | ||||
|
Factorul de scalare a iesirii PID-ului | ||||
|
Destinatia iesirii PID-ului |
menu.param |
|||
|
Meniul aplicatiei de citire/scriere intregi | ||||
|
Castigul Kp a controllerului de viteza |
1/rad |
5.3.PROGRAMAREA "M33_Ext V1.6_21p_Izq"(Stanga)
Parametri diferiti in comparatie cu cei standard :
|
Parametrii |
Descriere |
Defect |
Valori |
Unitati |
|
Referinta selectorului |
A1.A2 |
Pr | ||
|
Referinta presetata 2 |
RPM |
|||
|
Referinta presetata 3 |
RPM |
|||
|
Referinta presetata 4 |
RPM |
|||
|
Referinta presetata 5 |
RPM |
|||
|
Referinta presetata 6 |
RPM |
|||
|
Referinta presetata 7 |
RPM |
|||
|
Referinta presetata 8 |
RPM |
|||
|
Asteptarea rampei |
Oprit |
Pornit | ||
|
Modul de selectie al rampei |
Std |
FASt | ||
|
Activarea rampei S |
Oprit |
Pornit | ||
|
Limita de accelerare a rampei S |
s²/1000RPM |
|||
|
Selectorul ratei de accelerare | ||||
|
Rata de accelerare 1 |
s/1000 RPM |
|||
|
Rata de accelerare 2 |
s/1000 RPM |
|||
|
Rata de accelerare 3 |
s/1000 RPM |
|||
|
Rata de accelerare 4 |
s/1000 RPM |
|||
|
Rata de accelerare 5 |
s/1000 RPM |
|||
|
Rata de accelerare 6 |
s/1000 RPM |
|||
|
Rata de accelerare 7 |
s/1000 RPM |
|||
|
Rata de accelerare 8 |
s/1000 RPM |
|||
|
Rata de decelerare a selectorului | ||||
|
Rata de decelerare 1 |
s/1000 RPM |
|||
|
Rata de decelerare 2 |
s/1000 RPM |
|||
|
Rata de decelerare 3 |
s/1000 RPM |
|||
|
Rata de decelerare 4 |
s/1000 RPM |
|||
|
Rata de decelerare 5 |
s/1000 RPM |
|||
|
Rata de decelerare 6 |
s/1000 RPM |
|||
|
Rata de decelerare 7 |
s/1000 RPM |
|||
|
Rata de decelerare 8 |
s/1000 RPM |
|||
|
Pragul de viteza zero |
RPM |
|||
|
La limita inferioara de viteza |
RPM |
|||
|
La limita superioara de viteza |
RPM |
|||
|
Detectarea vitezei absolute |
Oprit |
Pornit | ||
|
Castigul proportional al controllerului de viteza(Kp1) |
1/rad s-1 |
|||
|
Castigul proportional al controllerului de viteza(Kp2) | ||||
|
Castigul integral al controllerului de viteza (Ki1) |
1/rad |
|||
|
Inertia motorului si a incarcaturii |
kg m² |
|||
|
Unghiul de faza al codificatorului | ||||
|
Bitii de rotire ai codificatorului dispozitivului | ||||
|
Liniile codificatorului dispozitivului per rotire | ||||
|
Rezolutia codificatorului dispozitivului la o singura rotire | ||||
|
Sursa de voltaj a codificatorului dispozitivului |
5V |
8V | ||
|
Tipul codificatorului dispozitivului |
Ab.Servo |
SC.Hiper | ||
|
Nivelul de detectie a erorii codificatorului dispozitivului | ||||
|
Autoconfigurarea codificatorului dispozitivului |
Oprit |
Pornit | ||
|
Filtrul codificatorului dispozitivului |
ms |
|||
|
Referinta maxima a codificatorului dispozitivului | ||||
|
Limita de current a motorizarii | ||||
|
Limita de current simetric | ||||
|
Offsetul cuplului de torsiune | ||||
|
Selectia offsetului cuplului de torsiune |
Oprit |
Pornit | ||
|
Selectorul de mod al cuplului de torsiune |
Speed |
Feed fwd | ||
|
Castigul Kp a controllerului de curent | ||||
|
Castigul Ki a controllerului de curent | ||||
|
Curentul estimat al motorului |
A |
|||
|
Incarcatura estimata /viteza estimata |
RPM |
|||
|
Voltajul estimat |
V |
|||
|
Numarul de poli ai motorului |
6 pole |
12 pole | ||
|
Frecventa maxima de intrerupere |
kHz |
|||
|
Inductanta transienta (sLs) |
mH |
|||
|
Cuplul de torsiune al motorului per amp.Kt |
Nm/A |
|||
|
Modul de oprire |
no.rP |
rP | ||
|
Viteza tinde spre zero |
On |
Off | ||
|
Timpul de alimentare : ore , minute |
hh.mm |
|||
|
Destinatia intrarii 1 analogice T5/6 |
menu.param |
|||
|
Modul intrarii 2 analogice T7 |
Volt | |||
|
Scalarea intrarii 2 analogice T7 | ||||
|
Inversorul intrarii 2 analogice T7 |
Off |
On | ||
|
Destinatia intrarii 2 analogice T7 |
menu.param |
|||
|
Destinatia intrarii 3 analogice T8 |
menu.param |
|||
|
Sursa iesirii 2 analogice T10 |
menu.param |
|||
|
Sursa/destinatia I/O 1 digitale T24 |
menu.param |
|||
|
Sursa/destinatia I/O 2 digitale T25 |
menu.param |
|||
|
Sursa/destinatia I/O 3 digitale T26 |
menu.param |
|||
|
Destinatia intrarii 4 digitale T27 |
menu.param |
|||
|
Destinatia intrarii 5 digitale T28 |
menu.param |
|||
|
Destinatia intrarii 6 digitale T29 |
menu.param |
|||
|
Selectia iesirii I/O 2 digitale T25 |
Oprit |
Pornit | ||
|
Dezactivarea autoselectiei intrarii digitale T28&T29 |
Oprit |
Pornit | ||
|
Timpul franarii complete |
s |
|||
|
Perioada franarii complete |
s |
|||
|
Parametrul 0.11 setat |
menu.param |
|||
|
Parametrul 0.14 setat |
menu.param |
|||
|
Parametrul 0.15 setat |
menu.param |
|||
|
Parametrul 0.16 setat |
menu.param |
|||
|
Parametrul 0.17 setat |
menu.param |
|||
|
Parametrul 0.18 setat |
menu.param |
|||
|
Parametrul 0.19 setat |
menu.param |
|||
|
Parametrul 0.20 setat |
menu.param |
|||
|
Parametrul 0.21 setat |
menu.param |
|||
|
Parametrul 0.22 setat |
menu.param |
|||
|
Parametrul 0.23 setat |
menu.param |
|||
|
Parametrul 0.24 setat |
menu.param |
|||
|
Parametrul 0.25 setat |
menu.param |
|||
|
Parametrul 0.26 setat |
menu.param |
|||
|
Parametrul 0.27 setat |
menu.param |
|||
|
Parametrul 0.28 setat |
menu.param |
|||
|
Parametrul 0.29 setat |
menu.param |
|||
|
Parametrul 0.29 setat |
menu.param |
|||
|
Starea modului timeout |
s |
|||
|
Sursa detectorului de prag 1 |
menu.param |
|||
|
Nivelul detectorului de prag 1 | ||||
|
Destinatia detectorului de prag 1 |
menu.param |
|||
|
Sursa 1 a selectorului variabilei 1 |
menu.param |
|||
|
Sursa 2 a selectorului variabilei 1 |
menu.param |
|||
|
Sursa 2 selectorului variabilei 2 |
menu.param |
|||
|
Destinatia selectorului variabilei 2 |
menu.param |
|||
|
Activarea controllerului franei |
diS |
USEr | ||
|
Intarzierea vitezei la aplicarea franei |
RPM |
|||
|
Intarzierea vitezei dupa eliberarea franei |
s |
|||
|
Intarzierea la aplicarea franei |
s |
|||
|
Castigul P al pozitiei controllerului | ||||
|
Sursa de referinta a PIDului |
menu.param |
|||
|
Limita estimata a referintei PID-ului |
s |
|||
|
Activarea PIDului |
Oprit |
Pornit | ||
|
Castigul I al PIDului | ||||
|
Limita inferioara a PIDului | ||||
|
Destinatia iesirii PIDului |
menu.param |
|||
|
Activarea limitei simetrice a PIDului |
Oprit |
Pornit | ||
|
Meniul 1 al aplicatiei de citire/scriere de intregi salvati | ||||
|
Meniul 1 al aplicatiei de citire/scriere de intregi | ||||
|
Meniul 1 al aplicatiei de citire/scriere de intregi | ||||
|
Meniul 1 al aplicatiei de citire/scriere de biti |
Oprit |
Pornit | ||
|
Meniul 2 al aplicatiei de citire/scriere de intregi | ||||
|
Meniul 2 al aplicatiei de citire/scriere de intregi | ||||
|
Meniul 2 al aplicatiei de citire/scriere de intregi | ||||
|
Meniul 2 al aplicatiei de citire/scriere de intregi | ||||
|
Meniul 2 al aplicatiei de citire/scriere de intregi | ||||
|
Castigul Kp al controllerului de viteza |
1/rad |
|||
|
Setarea parametrului 0.33 | ||||
|
Setarea parametrului 0.34 | ||||
|
Setarea parametrului 0.51 | ||||
|
Setarea parametrului 0.52 | ||||
|
Setarea parametrului 0.53 | ||||
|
Setarea parametrului 0.54 | ||||
|
Setarea parametrului 0.55 | ||||
|
Setarea parametrului 0.56 | ||||
|
Setarea parametrului 0.57 | ||||
|
Setarea parametrului 0.58 | ||||
|
Setarea parametrului 0.59 |
6.INDICATII DE EROARE
|
C.Acc |
Oprirea Smartcardului : Citire/Scriere pe Smartcard |
|
185 |
Se verifica daca Smartcardul este fixat / localizat corespunzator . Se inlocuieste Smartcardul . |
|
C.boot |
Modificarea parametrilor din meniul 0 nu poate fi salvata deoarece fisierul necesar nu a fost creat pe Smartcard . |
|
177 |
A fost initiate o scriere pe un parametru din meniul 0 prin intermediul tastaturii cu Pr 11.42 setat la auto(3) sau boot(4) , dar fisierul necesar nu a fost creat pe Smartcard . Se asigura ca Pr 11.42 este setat corect si se reseteaza dispozitivul pentru a se crea fisieurl necesar pe Smartcard .Se reincearca scrierea parametrului pe parametrul din meniul |
|
C.BUSY |
Smartcardul nu poate realiza functia ceruta deoarece este accesatat de un Modul de solutii . |
|
178 |
Se asteapta ca modulul de solutii sat ermine accesarea Smartcardului si apoi se incearca din nou accesarea functiei . |
|
C.Chg |
Locatia datelor deja contine datele . |
|
179 |
Se sterg datele din locatia datelor . Se scriu datele intr-o locatie alternativa. |
|
C.Cpr |
Valorile stocate in dispozitiv si valorile din blocul de date de pe Smartcard sunt diferite . |
|
188 |
Se apasa butonul rosu de resetare , |
|
C.dat |
Locatia specificata a datelor nu contine nici o data . |
|
183 |
Asigurati-va ca numarul blocului de date este corect . |
|
C.Err |
Datele de pe Smartcard sunt compromise . |
|
182 |
Asigurati-va ca datele sunt localizate corect .Se sterg datele si se incearca din nou . Se inlocuieste Smartcardul . |
|
C.Full |
Smarcardul este plin . |
|
184 |
Se sterge un bloc de date sau se utilizeaza un alt Smartcard . |
|
C.Optn |
Modulele de solutii fixate sunt diferite intre dispozitivul sursa si dispozitivul destinatie . |
|
180 |
Asigurati-va ca ,odulele de solutii sunt fixate . Asigurati-va ca modulele de solutii sunt in aceeasi fanta de module de solutii . Se apasa butonul rosu de resetare . |
|
C.rdo |
Smarcardul are setat doar un bit de citire . |
|
181 |
Se introduce 9777 in Pr xx.00 pentru a apermite Smartcardului acces la citire/scriere . Asigurati-va ca nu se scrie la locatii de date intre 500 si 999. |
|
C.rtg |
Smartcardul incearca sa schimbe dispozitivul destinatie estimat. Nu au fost transferati parametric ai dispozitivului . |
|
186 |
Se apasa butonul rosu de resetare . Parametri dispozitivului sunt :
Parametri de mai sus vor fi setati la valoarea lor standard . |
|
C.Typ |
Setul de parametri ai Smartcardului nu sunt compatibili cu dispozitivul |
|
187 |
Se apasa butonul rosu de resetare . Asigurati-va ca tipul dispozitivului destinatie este acelasi ca tipul fisierului dispozitivului parametrului sursa . |
|
Eroare |
Diagnoza |
|
OI.IAC | |
|
3 | |
|
C.Acc | |
|
185 | |
|
C.boot | |
|
177 | |
|
C.BUSY | |
|
178 | |
|
C.Chg | |
|
179 | |
|
C.cPr | |
|
188 | |
|
C.dAt | |
|
183 | |
|
C.Err | |
|
182 | |
|
C.Full | |
|
184 | |
|
cL2 | |
|
28 | |
|
cL3 | |
|
29 | |
|
CL.bit | |
|
35 | |
|
C.OPtn | |
|
180 | |
|
C.rdo | |
|
C.rtg | |
|
186 | |
7.SCHEME ELECTRICE
7.1.SSCHEME DE ALIMENTARE ELECTRICA
7.1.1.Motor asincron 'Fara salvare' ( 0461017)
7.1.2.Motor asincron 'Cu salvare'(0461018)
7.1.3.Motor sincron 'Fara salvare' ( 0461011)
7.1.4.Motor sincron 'Cu salvare'(0461016)
7.2.LANT DE SIGURANTA
7.2.1.Motor asincron (0461019)
7.2.1.Motor sincron (0461012)
Copyright © 2025 - Toate drepturile rezervate
| Instalatii | |||
|
|||
|
| |||
|
| |||
|
|
|||