|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
Modeling an Automatic Transmission Controller (Drivetrain)
Modeling an Automatic Transmission Controller (Drivetrain)
(Modelarea controlerului unei transmisii automate)
Modelarea controlerului unei transmisii automate se poate realiza cu ajutorul programului Matlab Simulink. In acest demo, Simulink este folosit pentru un model de automobile de tip drivetrain. Stateflow® enhances the Simulink model with its representation of the transmission control logic.Simulink ofera un mediu puternic, pentru modelarea si simularea proceselor si sistemelor dinamice. InIn many systems, though, supervisory functions like changing modes or invoking new gain schedules must respond to events that may occur and conditions that develop over time.IIN multe sisteme functiile de supraveghere cum ar fi modurile schimbarii sau invocarea de noi programe trebuie sa raspunda la conditiile si evenimentele care pot sa apara si care se dezvolta in timpAs a result, the environment requires a language capable of managing these multiple modes and developing conditions.. In acelasi timp mediul necesita o interfata capabila sa gestioneze mai multe moduri cu aceste conditii cat si cele in curs de dezvoltare. In the following example, Stateflow demonstrates its strength in this capacity by performing the function of gear selection in an automatic transmission. In exemplul urmator Stateflow demonstreaza puterea sa in aceasta privinta folosind functiile de selectie intr-o transmisie automata. This function is combined with the drivetrain dynamics in a natural and intuitive manner by incorporating a Stateflow block in the Simulink block diagram. Aceasta functie este combinata cu dinamica naturala drivetrain intr-un mod intuitiv prin incorporarea unui bloc Stateflow in diagrama Simulink.
Modelarea se realizeaza prin demo-ul Matlabului cu numele sldemo_autotrans. Pentru a deschide acest model tip sldemo_autotrans in Matlab se tasteaza numele in fereastra de comanda.
![]() ,unde: Ne-viteza
motorului,Iei-momentul de inertie al motorului si rotorului,Te si Ti-cuplul
motorului si rotorului
,unde: Ne-viteza
motorului,Iei-momentul de inertie al motorului si rotorului,Te si Ti-cuplul
motorului si rotorului
![]()
![]() ,unde Nin-viteza
turbinei(cuplul convertit de iesire)=viteza impusa de transmisie(RPM)
,unde Nin-viteza
turbinei(cuplul convertit de iesire)=viteza impusa de transmisie(RPM)
![]() (raportul cuplului)
(raportul cuplului)
![]() (raportul de
transmisie)
(raportul de
transmisie)
![]()
![]()
![]() (cuplurile de
transmisie de intrare si iesire)
(cuplurile de
transmisie de intrare si iesire)
![]() (viteza de transmisie de intrare si iesire)
(viteza de transmisie de intrare si iesire)
![]()
![]() (inertia vehiculului)
(inertia vehiculului)
![]() (viteza rotii RPM)
(viteza rotii RPM)
![]() (raportul final de
transmisie)
(raportul final de
transmisie)
![]() (cuplul de incarcare)
(cuplul de incarcare)
![]()
![]() (cuplurile de incarcare si franare )
(cuplurile de incarcare si franare )
![]() (viteza liniara a vehiculului)
(viteza liniara a vehiculului)
Modelul The Simulink model shown in Figure 3 is composed of modules which represent the engine, transmission, and the vehicle, with an additional shift logic block to control the transmission ratio.Simulink prezentat in Figura 1 este compus din module care constituie motorul, transmisia si vehiculul.User inputs to the model are in the form of throttle (given in percent) and brake torque (given in ft-lb). Factori de intrare pentru model sunt sub forma de acceleratie (prezentate in procente) si de cuplu de frana (dat in ft-lb). The user inputs throttle and brake torques using the ManeouverGUI interface. Utilizatorii impun modelului factorii de acceleratie si cuplul de franare prin interfata ManeouverGUI. Subsistemul The Engine subsystem consists of a two-dimensional table that interpolates engine torque versus throttle and engine speed.motorului consta dintr-un tabel bidimensional care interpoleaza cuplul motorului cu acceleratia si viteza. Figure 3 shows the composite Engine subsystem. Figura 2 arata compozitia subsistemului motor.Practic se face dublu clic pe acest subsistem in model pentru a se vizualiza structura sa.
Blocul sistemului de transport determina raportul prezentat in Tabelul 1 si evalueaza transmiterea la intrare si la iesire a cuplului de viteza. Figure 6 shows the block diagram for the subsystem that realizes this ratio in torque and speed.Figura 5 arata diagrama bloc pentru subsistemul care ia in seama acest raport in cuplu si viteza.
Table 1: Transmission gear ratios Tabelul 1:
gear Rtr = Nin/Ne 1 2.393 2 1.450 3 1.000 4 0.677 RTR = Nin / Ne 1 2,393 2 1,450 3 1,000 4 0,677
Figure 7: Transmission gear ratio subsystem Figura 5. Subsistemul de transmitere a vitezei
The Stateflow block labeled ShiftLogic implements gear selection for the transmission. Blocul stateflow cu eticheta ShiftLogic pune in aplicare uneltele de selectie pentru transmitere. Double clock on ShiftLogic in the model window to open the Stateflow diagram. Dublu click pe ShiftLogic in model, pentru a deschide fereastra diagramei Stateflow. The Stateflow Explorer is utilized to define the inputs as throttle and vehicle speed and the output as the desired gear number.Stateflow Explorer este utilizata pentru a defini factorii de productie si de acceleratie ca vehicul de viteza, precum si de iesire dorita ca numarul uneltelor. Two dashed AND states keep track of the gear state and the state of the gear selection process.The overall chart is executed as a discrete-time system, sampled every 40 milliseconds.Diagrama Stateflow este prezentata in Figura 6 ilustrand functionalitatea blocului.
Figure 8: Stateflow diagram of the transmission shift logic Figura 6. Diagrama Stateflow a schimbului logic de transport
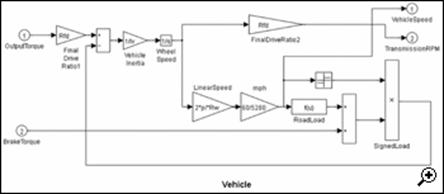
Schimbarea logica comportamentala poate fi observata in timpul in care se simuleaza in depanatorul Stateflow. The (always active) begins by performing the computations indicated in its function.Stadiul de selectie (intotdeauna activ) incepe prin efectuarea calculelor in timpul functionarii. The Vehicle subsystem (Figure 8) uses the net torque to compute the acceleration and integrate it to compute the vehicle speed, per Equation 4 and Equation 5.Subsistemul vehiculului este prezentat in figura 7 care foloseste cuplul net pentru a calcula acceleratia pe care o integreaza pentru a calcula viteza vehiculului. The Vehicle subsystem is masked.To see the strucure of the Vehicle block, right click on it and select 'Look Under Mask' from the drop-down menu. Parametrii sunt: raportul final al transmisiei , coeficientii polinomului pentru coeficientii de frecare si aerodinamici la franare, raza rotii, inertia vehiculului, viteza de transmisie initiala la iesire.
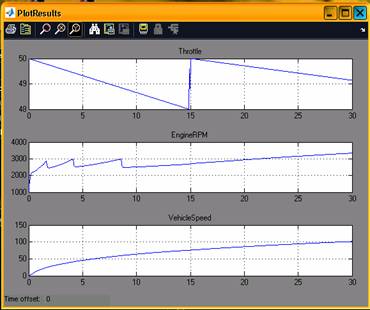
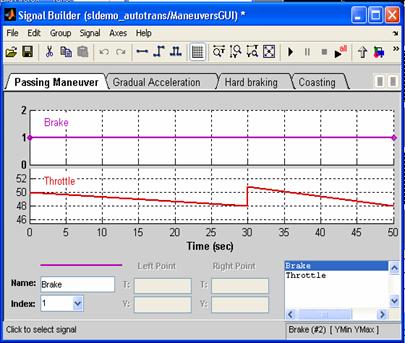
The vehicle speed starts at zero and the engine at 1000 RPM. Daca simulam modelul cu parametrii impliciti se obtin graficele din fig. 1,unde se observa ca viteza vehiculului incepe de la zero si a motorului de la 1000 rpm. Figure 12 shows the plot for the baseline results, using the default parameters.Cu o incarcare de 60% la t = 0 motorul imediat raspunde dublandu-si viteza. This brings about a low speed ratio across the torque converter and, hence, a large torque ratio (see Figure 6 and Figure 11. The vehicle accelerates quickly (no tire slip is modeled) and both the engine and the vehicle gain speed until about , at which time a 1-2 upshift occurs. The engine speed characteristically drops abruptly, then resumes its acceleration. The 2-3 and 3-4 upshifts take place at about four and eight seconds, respectively. Notice that the vehicle speed remains much smoother due to its large inertia. Acest lucru duce la o viteza scazuta fata de conversia de cuplu si, prin urmare, un sistem de cuplu mare. Vehiculul accelereaza rapid si atat motorul cat si viteza vehiculului castiga pana la circa t = 2 sec. Caracterizat de motor viteza scade brusc, apoi isi reia accelerarea. Cresterea vitezei 2-3 si 3-4 are loc la aproximativ patru si respective opt secunde si se observa ca vehiculul ramane mult la aceeiasi viteza datorita inertiei mari Figure 12: Passing maneouver simulation time historyAt , the driver steps the throttle to 100% as might be typical of a passing maneuver.La t = 15sec se incarca masina la 100% si viteza motorului sare de laThe transmission downshifts to third gear and the engine jumps from about 2600 RPM to about 3700 RPM. 2600 RPM la aproximativ 3700 RPM, vehicul accelereaza la aproximativ 100 de mph aparand schimbari la t = 21 sec. Pentru a studia si alte cazuri de incarcare se face Double click on the ManeuversGUI block and use the graphical interface to vary the throttle and brake history.dublu clic pe blocul ManeuversGUI si folosindu-ne de interfata grafica variem acceleratia si istoricul franarii.Daca modificam timpul de incarcare de 100% la 30 sec graficul arata ca in fig.9.

Se poate observa ca viteza vehiculului nu depaseste 60 si timpul de raspuns este de 5 secunde. Viteza motorului se stabilizeaza dupa aproximativ 5.8 secunde la 600 RPM. One can easily enhance this basic system in a modular manner, for example, by replacing the engine or transmission with a more complex model.Se poate imbunatati usor acest sistem de baza prin inlocuirea motorului sau a transmisiei cu un model mult mai complex. We can thus build up large systems within this structure via step-wise refinement. Putem astfel construi sisteme mari cu aceasta structura prin intermediul rafinamentului pasului intelept. The seamless integration of Stateflow control logic with Simulink signal processing enables the construction of a model which is both efficient and visually intuit Integrarea Stateflow cu semnal de prelucrare Simulink permite construirea unui model care este eficient si cu un impact vizual si intuitiv.
Copyright © 2024 - Toate drepturile rezervate