|







 |  |
|
| |
 | Aeronautica | Comunicatii | Constructii | Electronica | Navigatie | Pompieri |
| Tehnica mecanica |
robinete de reglare
1. OBIECTIVUL LUCRARII
In aceasta lucrare, se urmareste rezolvarea urmatoarelor obiective :
cunoasterea principala a constructiei si a functionalitatii unui robinet de reglare (RR) ;
analiza teoretica si experimentala a regimului stationar al RR ;
insusirea intreprinderilor de calcul pentru dimensionarea hidraulica si alegerea unui RR.
2. NOTIUNI RECAPITULATIVE DE BAZA
Robinetul de reglare serveste la modificarea debitului de fluid care circula printr-o conducta, prin modificarea sectiunii de trecere a fluidului.
El este format dintr-un dispozitiv de actionare - servomotorul si un element obturator - organ de reglare (organ de executie). In varianta cu servomotor pneumatic si un obturator de tip ventil, robinetul de reglare este elementul de executie cel mai frecvent intalnit in practica sistemelor de reglare. In anumite cazuri speciale, servomotorul este hidraulic sau electric, iar elementul obturator este clapeta, sertar, supapa, bila etc.
Dupa cum sistemul de obturare este inchis sau deschis in absenta semnalului de comanda, robinetul de reglare este normal inchis sau normal deschis. Pentru evitarea blocarii ventilului in scaun, robinetul de reglare nu asigura inchiderea completa a sectiunii de trecere. In cazul in care caderea de presiune pe robinet este mare, pentru compensarea fortelor care actioneaza asupra obturatorului mobil se poate utiliza varianta de robinet cu doua scaune.
Ansamblul mobil al robinetului de reglare este format din membrana M, rigidizata pe ambele parti cu discuri metalice, resortul R, tija T si ventilul V (fig.1).
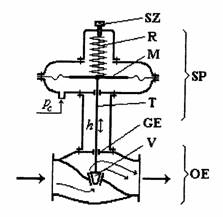
Fig.1. Robinet de reglare:
SP - servomotor pneumatic; OE - organ de executie.
Resortul elastic R are rolul de a asigura proportionalitatea intre deplasarea (cursa) h a tijei servomotorului si presiunea de comanda pc. Ansamblul mobil se afla in echilibru sub actiunea urmatoarelor forte: forta generata de actiunea presiunii de comanda asupra membranei, forta elastica a resortului, fortele de frecare cu garnitura de etansare GE, greutatea proprie si fortele create de presiunea fluidului de lucru pe ambele parti ale ventilului obturator.
Servomotoare pneumatice. Acestea pot fi pot fi
cu membrana;
cu piston.
In figura 2 sunt prezentate doua tipuri de servomotoare pneumatice: cu resortul sub membrana (fig.2,a) si cu resortul deasupra membranei (fig.2,b).
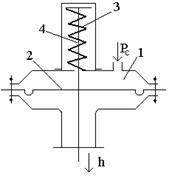
Fig. 2. Servomotoare pneumatice cu membrana:
a) cu resort sub membrana; b) cu resort deasupra membranei
1-camera de aer; 2- membrana; 3- resort; 4- tija SM;
pc- presiunea de comanda; h- cursa tijei.
Forta generata de aerul comprimat asupra membranei 2 este compensata de forta de comprimare a resortului 3. In functie de valorile presiunii de comanda rezulta pozitii corespunzatoare ale tijei servomotorului 4, respectiv diferite valori ale cursei h.
 In
realitate intre semnalul de comanda pc
si cursa tijei h nu exista
o dependenta univoca. Din cauza frecarilor existente in
servomotor si in organul de reglare antrenat caracteristica statica a
servomotorului pneumatic prezinta fenomenul de histerezis (fig.3).
In
realitate intre semnalul de comanda pc
si cursa tijei h nu exista
o dependenta univoca. Din cauza frecarilor existente in
servomotor si in organul de reglare antrenat caracteristica statica a
servomotorului pneumatic prezinta fenomenul de histerezis (fig.3).
Fig.3. Caracteristica servomotorului pneumatic.
Daca tija servomotorului a ajuns prin coborari succesive in punctul A, la cresterea semnalului de comanda servomotorul nu raspunde decat atunci cand presiunea a ajuns la valoarea pc2. Cand semnalul de comanda ajunge la valoarea pc3, tija servo-motorului se gaseste in punctul C efectuand o cursa mult micsorata (Dh) fata de cresterea de presiune. Daca in aceasta pozitie se produce o scadere a comenzii, fenomenele evolueaza in sens invers.
Pentru corectarea fenomenului de histerezis se utilizeaza un dispozitiv numit pozitioner. Pozitionerul este de fapt un regulator care impreuna cu servomotorul alcatuieste un sistem automat de urmarire la care marimea prescrisa este valoarea dorita a cursei, asociata semnalului de comanda, iar marimea reglata este valoarea curenta a cursei (fig. 4).
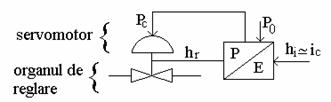
Fig.4. Ansamblul robinet de reglare - pozitioner.
hi- cursa prescrisa; p0- presiune de alimentare a convertorului.
Atunci cand regulatorul constata o diferenta intre prescrierea hi si valoarea curenta hr, acesta modifica valoarea comenzii pc in vederea eliminarii abaterii constatate.
Organele de reglare sunt elemente ale dispozitivului de automatizare utilizate pentru modificarea debitelor de masa sau de energie.
Componentele de baza ale organului de reglare alcatuiesc sistemul de obturare si acestea sunt scaunul si obturatorul (fig. 5).
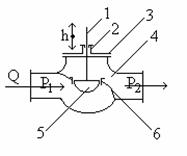
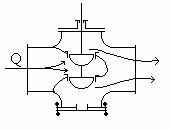
Fig. 5. Organe de reglare:
a) cu un singur scaun; b) cu doua scaune;
1- tija, 2- presetupa, 3- capac, 4- corp, 5- obturator, 6- scaun.
Pentru diverse valori ale cursei h sistemul obturator-scaun realizeaza strangulari diferite ale cai de fluid, deci debitul este variabil.
Datorita curgerii fluidului prin strangularea creata de sistemul obturator scaun rezulta caderea de presiune remanenta pe robinetul de reglare de forma:
![]() .
.
Aceasta cadere de presiune genereaza o forta asupra obturatorului 5 orientata de jos in sus, care trebuie preluata de servomotor. Acest dezavantaj este rezolvat prin utilizarea variantei din figura b), deci a unui robinet cu doua scaune, care reprezinta un sistem echilibrat la care rezultanta fortelor de presiune este aproximativ nula. Dependenta dintre debit si caderea de presiune este data de relatia:
![]()
in care: Q este debitul, a -
coeficient de debit, e -
coeficient de corectie datorat compresabilitatii fluidului, Ar- aria sectiunii
minime a strangularii, ![]() - caderea de presiune remanenta, r - densitatea
fluidului. Pentru un robinet de reglare, la modificarea cursei h se modifica toti parametri
din aceasta relatie. Pentru simplificare s-a introdus notatia:
- caderea de presiune remanenta, r - densitatea
fluidului. Pentru un robinet de reglare, la modificarea cursei h se modifica toti parametri
din aceasta relatie. Pentru simplificare s-a introdus notatia:
![]() ,
,
in care ![]() este numeric egal cu
debitul unui fluid, cu densitatea de 1 kg/dm3 (apa) care trece prin
robinetul de reglare atunci cand caderea de presiune remanenta este
de 1 bar.
este numeric egal cu
debitul unui fluid, cu densitatea de 1 kg/dm3 (apa) care trece prin
robinetul de reglare atunci cand caderea de presiune remanenta este
de 1 bar.
Dependenta
![]() se numeste caracteristica statica intrinseca
a organului de reglare.
se numeste caracteristica statica intrinseca
a organului de reglare.
Practica utilizarii si fabricarii robinetelor de reglare au impus urmatoarele caracteristici intrinseci (fig.6):
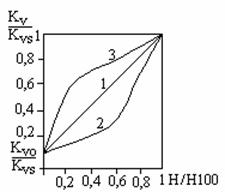
Fig.6. Tipuri de caracteristici intrinseci pentru organul de reglare:
1 - liniara; 2 - logaritmica; cu deschidere rapida.
![]() - valoarea lui
- valoarea lui ![]() pentru cursa
nominala (pentru valoarea maxima a cursei);
pentru cursa
nominala (pentru valoarea maxima a cursei);
![]() -valoarea lui
-valoarea lui ![]() pentru h=0;
pentru h=0; ![]() - valoarea nominala a cursei (valoarea maxima a
cursei);
- valoarea nominala a cursei (valoarea maxima a
cursei); ![]() -debit de scapari ce apare din cauze constructive.
-debit de scapari ce apare din cauze constructive.
Caracteristica intrinseca a robinetului de reglare este data de profilul obturatorului (fig.7).
Dependenta Q=f(h) la care nu se mai impune conditia constantei caderii de presiune remanenta pe robinetul de reglare se numeste caracteristica statica de lucru a organului de reglare.

a) b) c)
Fig.7. Profile de obturatoare:
a) logaritmica; b) liniara; c) cu deschidere rapida.
In
functie de tipul caracteristicii intrinseci liniare sau logaritmice
rezulta doua familii de caracteristici statice de lucru in
functie de raportul ![]() , in care
, in care ![]() este caderea de
presiune pe robinet pentru valoarea maxima a cursei, iar
este caderea de
presiune pe robinet pentru valoarea maxima a cursei, iar ![]() reprezinta
pierderea de presiune pe intreg sistemul hidraulic.
reprezinta
pierderea de presiune pe intreg sistemul hidraulic.
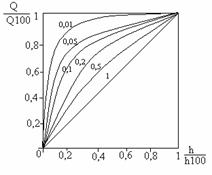
RR liniare:
![]()
![]()
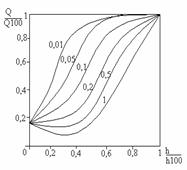
Fig.8. Caracteristici de lucru ale OR.
Aceste grafice sunt utilizate pentru alegerea robinetelor de reglare in vederea obtinerii unei anumite caracteristici de lucru:
- pentru Y=0,41, se utilizeaza robinete de reglare liniare montate pe conducte scurte, cu surse de presiune ce au pierderi interne mici;
- pentru Y=0,050,3, se utilizeaza robinete de reglare logaritmice montate pe conducte lungi cu numeroase rezistente locale (alte robinete, coturi).
3. CONTINUTUL SI DESFASURAREA LUCRARII DE LABORATOR
3.1. Determinarea experimentala a carcteristicii statice SM
Se determina experimental caracteristica statica a SM pneumatic cu pozitioner pentru variatia crescatoare si apoi descrescatoare a semnalului de comanda.
Se efectueaza urmatoarele masuratori :
- ic- curentul de comanda, cu posibilitatea de modificare de la elementul de comanda manuala HC ;
- h-cursa tijei SM.
Se reprezinta grafic in coordonate normate caracteristica intrinseca, h*=f(i*c), in care h *= h / h100 , i*c=(ic-2) / 8.
3.2. Determinarea experimentala a caracteristicilor statice ale OR
Determinarile experimentale se efectueaza pe standul prezentat in figura 9.
Cu ajutorul standului se vor masura urmatoarele marimi :
ic - curentul de comanda modificat de HC ;
h - cursa tijei SM ;
Q - debitul de apa masurat de PI ;
Po - presiunea de refulare a pompei masurata de PI ;
P1, P2 - presiunile in amonte si in aval de RR masurate la M2 si M3.
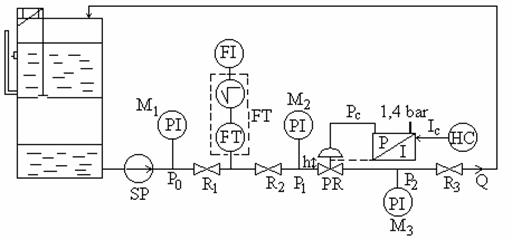
Fig.9. Schema principiala a standului pentru determinarea
caracteristicilor statice ale RR.
Pentru determinarea caracteristicii intrinseci a OR se procedeaza astfel:
se porneste pompa prin actionarea butonului de pornire de pe panou ;
se modifica semnalul de comanda ic prin intermediul butonului de comanda al HC, pentru variatii ale cursei de circa 3 sau 4 mm ;
se manevreaza robinetele manuale R2 si R3 pana ce diferenta de presiune dintre indicatiile manometrelor M2 si M3 este de 1 bar ;
dupa stabilirea regimului stationar se citesc : debitul specific la FI si cursa tijei ;
se continua masuratorile pana la h100 si kv100 ;
se calculeaza valorile normate : k*v=kv /kv100 , h*=h / h100 .
Se reprezinta grafic caracteristica statica intrinseca in coordonate normate si se precizeaza tipul OR.
Pentru determinarea caracteristicii de lucru a OR se efectueaza urmatoarele operatiuni :
se porneste pompa, apoi se inchide complet robinetul R1 si se citeste la manometrul M1 presiunea P0 ;
se deschide robinetul R1 si se aduce robinetul R3 intr-o pozitie intermediara ;
se realizeaza variatii de 3 sau 4 mm ale cursei tijei prin intermediul semnalului de comanda al HC ;
se citesc la fiecare determinare cursa tijei si debitul de apa masurat de FI ;
pentru pozitia complet deschis a OR se determina ∆pr100 si apoi parametrul Ψ=∆pr100 / po ;
se reprezinta grafic caracteristica statica de lucru a OR in coordonate normate si se aprecieaza gradul de liniaritate al acesteia pentru parametrul Ψ .
Pentru a determina alte caracteristici de lucru se modifica pozitia robinetului R3 , prin care se simuleaza conducte cu rezistente hidraulice diferita si se reia succesiunea operatiilor prezentate mai sus.
Caracteristicile statice ale OR se reprezinta in acelasi grafic.
INTREBARI DE CONTROL
1. Care este rolul robinetului de reglare intr-un SRA?
2. Care sunt partile componente ale unui RR?
3. Care sunt cauzele aparitiei histerezisului in cazul caracteristicii statice a SM?
4. Definiti caracteristicile statice ale OR.
Copyright © 2024 - Toate drepturile rezervate
| Instalatii | |||
|
|||
|
| |||
|
| |||
|
|
|||